河南科技大学10级自动化单片机实验
- 格式:docx
- 大小:18.35 KB
- 文档页数:6


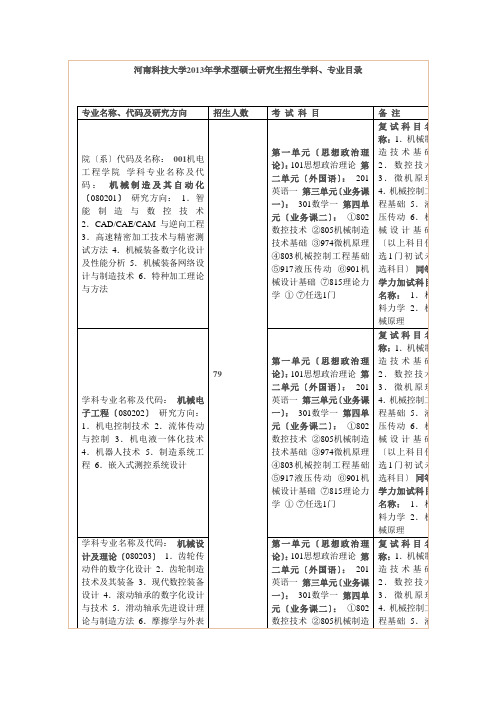
§招生单位:005机电学院§招生专业:080201机械制造及其自动化§考试科目:(点击科目名称可以查看该科目的详细信息,包括考试大纲和参考书目录)政治理论-->101思想政治理论外国语-->201英语一业务课一-->301数学一业务课二-->815理论力学823电工电子学(报名时在2门中任选一门作为该单元考试科目)专业课加试-->551机械原理552微机原理及应用(复试时在2门中任选一门作为该单元考试科目)§研究方向:01机械加工及其自动化02特种加工及其自动化03大型结构加工技术04表面技术§该专业招生说明:第四门课选考理论力学,复试考试科目请选择微机原理及应用;第四门课选考电工电子学,复试考试科目请选择机械原理。
同等学力加试:材料力学、机械设计§理论力学参考书目:《理论力学》(第六版,上、下册),哈尔滨工业大学编,高等教育出版社§理论力学考试大纲:1.物体的受力分析力、刚体、平衡的概念,静力学公理,约束和约束力,分离体,受力图。
2.平面汇交力系与平面力偶系力的投影,平面汇交力系的合成与平衡,平面力对点的矩,平面力偶理论。
3.平面任意力系力线平移定理,平面力系简化理论,主矢,主矩,平面任意力系的平衡方程及其应用,物体系统的平衡,平面桁架。
4.空间任意力系空间汇交力系,空间力对点的矩和对轴的矩,空间力偶理论,空间力系简化理论,主矢,主矩,空间任意力系的平衡方程及其应用,重心。
5.摩擦摩擦角与滚动摩阻的概念,考虑摩擦的平衡问题。
6.点的运动学点的运动的矢量法,直角坐标法和自然法。
7.刚体的基本运动刚体的平移及其特征,刚体的定轴转动。
8.点的合成运动绝对、相对和牵连运动,点的速度合成定理,点的加速度合成定理。
9.刚体平面运动平面运动的概念,平面图形上两点速度关系式,速度投影定理,速度瞬心法,平面图形上两点加度关系式。

汽车服务工程(工学学士)一、毕业生应具备的知识和能力(1)掌握汽车服务工程专业的基础理论;(2)掌握汽车服务工程专业的基本知识、基本方法和基本技能;(3)掌握本专业必要的机械、材料、电工电子的基本知识和技能;(4)熟悉国家关于汽车服务工程专业方面的方针政策和法规,了解汽车服务工程专业的发展动态;(5)掌握文献检索、资料查询的基本方法,具有初步的科学研究和实际工作能力;(6)掌握一门外语,能熟练阅读本专业外文书刊;(7)具有一定的计算机应用能力。
二、专业课程设置1、专业基础课高等数学、线性代数、概率论与数理统计、大学物理、大学物理实验、普通化学及实验、理论力学、材料力学、工程图学、电工电子、汽车构造、发动机原理、汽车运用工程、汽车市场营销、工程材料、机械设计、机械原理、汽车设计基础、液压与气动技术。
2、专业课汽车电器与电子技术、汽车检测与诊断技术、汽车维修工程、汽车服务企业管理、汽车服务项目设计与规划、汽车改装技术。
3、专业选修课制造技术基础、运输技术经济学、汽车控制技术基础、物流基础、汽车性能实验技术、微机原理与接口技术、单片机原理与应用、计算机网络技术、汽车运输工程、汽车事故工程、汽车节能技术、车用传感技术、汽车污染控制、汽车装饰技术、汽车再生技术、汽车运行材料、汽车服务信息系统、汽车贸易、汽车保险与理赔、汽车评估、文献检索、供应链管理概论、专业外语、电子商务概论、汽车文化讲座、智能车辆技术基础等。
三、专业实践教学内容专业认识实习、工程图学综合实践、金工实习、汽车驾驶实习、汽车保养与维修实习、机械设计课程设计、机械原理课程设计、汽车维修企业设计、汽车检测诊断实习、汽车服务工程实习、毕业实习、毕业设计(论文)。
四、研究生专业机械制造及其自动化、机械电子工程、机械设计及理论、车辆工程、工业工程、动力机械及工程等。
五、与高中科目的相关程度语文C、数学B、英语B、物理A、化学D、生物E、计算机C、政治D、历史E、地理D、美术D、音乐E。
吉林大学网络教育洛阳学习中心2016年度招生简章一、学校简介吉林大学是“211工程”、“985工程”国家重点建设的大学,有本科专业124个,硕士学位授权点299个,博士学位授权点237个,博士后科研流动站41个,涵盖哲学、经济学、法学、教育学、文学、历史学、理学、工学、农学、医学、管理学、军事学、艺术学等全部13大学科门类;学校师资力量雄厚,有两院院士24人,哲学社会科学资深教授6人,国务院学位委员会学科评议组成员18人。
吉林大学作为首批建立研究生院的22所大学之一,现已建立起研究生教育、本科教育、继续教育完整的人才培养体系。
吉林大学是2001年6月经国家教育部正式批准开展现代远程教育的试点高校之一。
学校坚持以经济建设和社会发展需求为导向,充分发挥学科门类齐全和师资的优势,开展现代远程高等学历教育和非学历教育;根据远程教育特点,建设了软件硬件技术服务体系、教学资源体系、综合服务体系、质量保障体系。
近年来,学校依据已开设的43个本、专科专业,利用现代信息技术手段自主开发600余门视频课件及网络课程,为广大求学者提供突破时空限制的学习深造机会。
二、招生对象与报名条件面向社会招收高中起点专科、专科起点本科业余学习的学生。
①报考高中起点专科专业,须具有普通高中、职业高中、中专毕业文化程度或同等学历;②报考专科起点本科专业,须具有国民教育系列大学专科及以上学历。
报考护理学专业的考生,应当已取得省级卫生行政部门颁发的执业资格证书。
三、招生专业、入学考试科目1.高中起点专科:层次学科门类专业名称入学考试科目高起法学法律事务高中英语高中语文专医学护理药学管理学经济管理行政管理会计电算化人力资源管理工学计算机应用技术高中英语高中数学计算机通信电气自动化技术建筑工程技术道路桥梁工程技术机电一体化技术汽车检测与维修技术2.专科起点本科:层次学科门类专业名称入学考试科目专升本工学计算机科学与技术大学英语高等数学(一)土木工程(工业与民用建筑方向)土木工程(道路与桥梁方向)机械电子工程通信工程汽车服务工程电气工程及其自动化医学护理学大学英语大学语文药学法学法学管理学行政管理人力资源管理会计学经济学国民经济管理大学英语高等数学(二)金融学四、报名事宜1、报名所需材料:持有本人二代身份证、毕业证原件、两寸蓝底电子照片到学习中心办理报名手续。
保证书怎么写?【优秀7篇】(经典版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如总结报告、合同协议、规章制度、条据文书、策划方案、心得体会、演讲致辞、教学资料、作文大全、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, our store provides various types of classic sample essays, such as summary reports, contract agreements, rules and regulations, doctrinal documents, planning plans, insights, speeches, teaching materials, complete essays, and other sample essays. If you want to learn about different sample formats and writing methods, please pay attention!保证书怎么写?【优秀7篇】承诺书是承诺人对要约人的要约完全同意的意思,表示以书面形式。

电子信息工程专业,是培养具备电子技术和信息系统的基础知识,能从事各类电子设备和信息系统的研究、设计、制造、应用和开发的高等工程技术人才。
培养目标电子信息工程专业:本专业培养具备电子技术和信息系统的基础知识,能从事各类电子设备和信息系统的研究、设计、制造、应用和开发的高等工程技术人才,是一类与理工科交叉的计算机专业。
培养要求本专业是一个电子和信息工程方面的较宽口径专业。
本专业学生主要学习信号的获取与处理、电厂设备信息系统等方面的专业知识,受到电子与信息工程实践的基本训练,具备设计、开发、应用和集成电子设备和信息系统的基本能力。
毕业生可从事电子设备、信息系统和通信系统的研究、设计、制造、应用和开发工作,可达到计算机等级四级的要求。
培养内容1、较系统地掌握本专业领域宽广的技术基础理论知识,适应电子和信息工程方面广泛的工作范围;2、掌握电子电路的基本理论和实验技术,具备分析和设计电子设备的基本能力;3、掌握信息获取、处理的基本理论和应用的一般方法,具有设计、集成、应用及计算机模拟信息系统的基本能力;4、了解信息产业的基本方针、政策和法规,了解企业管理的基本知识;5、了解电子设备和信息系统的理论前沿,具有研究、开发新系统、新技术的初步能力;6、掌握文献检索、资料查询的基本方法,具有一定的科学研究和实际工作能力。
7、.掌握计算机电子技术所必须的基本知识基本理论和原理;8、掌握电子产品的一般生产工艺具有电子产品生产管理能力;9、掌握电子电器类维修焊接技术具有按工艺文件完成复杂产品的全部装接焊接能力;10、具有熟练使用和维护常用电子仪器仪表的能力和按高度文件调试设备排除故障的能力;11、具有电子工程的现场安装与调试基本能力。
主修课程主干学科:电子科学与技术、信息与通信工程、计算机科学与技术。
主要课程:电路理论系列课程、计算机技术系列课程、信息理论与编码、信号与系统、数字信号处理、电磁场理论、自动控制原理、感测技术等。
自动化考研方向以及学校排名控制理论与控制工程课程设置矩阵论,泛函分析,线性系统理论,优化理论与最优控制,非线性控制系统理论,智能控制,自适应控制,鲁棒控制,系统辨识与建模,随机过程与随机控制,离散事件系统理论,控制系统的计算机辅助设计语仿真,机器人控制等。
检测技术与自动化装置课程设置矩阵分析,数学物理方程,误差分析,现代控制理论,近代物理基础,电磁场理论,检测理论,信号处理,传感器与自动检测技术,自动测试与故障诊断技术,仪表智能化技术,仪表可靠性技术,工业计算机网络和集散控制系统,过程模型化与软测量技术等。
系统工程课程设置数理统计及随机过程,矩阵论,最优化理论与方法,系统工程导论,系统工程方法论,管理信息系统与决策支持系统,信息工程,系统建模与仿真,现代控制理论基础,智能控制,计算机网络理论与技术,复杂系统分析,经济系统分析(宏观和微观)等。
模式识别与智能系统课程设置随机过程与数理统计,矩阵论,优化理论,近世代数,数理逻辑,数字信号处理,图象处理与分析,模式识别,计算机视觉,人工智能,机器人学,计算智能,非线性理论(如分形、混沌等),控制理论,系统分析与决策,计算机网络理论等。
导航、制导与控制课程设置矩阵论,泛函分析,数值分析,线性系统理论,随机过程与滤波,系统辨识,计算机控制系统,最优控制,运动体控制与制导系统,导航系统,火力控制技术,传感技术及应用,信息融合技术,系统建模与仿真,人工智能等。
控制理论与控制工程排名学科代码:0811011 清华大学 A++ 081101控制理论与控制工程2 山东大学 A++ 081101控制理论与控制工程3 北京科技大学 A++ 081101控制理论与控制工程4 上海交通大学 A++ 081101控制理论与控制工程5 东北大学 A++ 081101控制理论与控制工程6 浙江大学 A++ 081101控制理论与控制工程7 同济大学 A+ 081101控制理论与控制工程8 西北工业大学 A+ 081101控制理论与控制工程9 南开大学 A+ 081101控制理论与控制工程10 华南理工大学 A+ 081101控制理论与控制工程检测技术与自动化装置排名学科代码:0811021 浙江大学 A++ 081102检测技术与自动化装置2 天津大学 A++ 081102检测技术与自动化装置3 清华大学 A++ 081102检测技术与自动化装置4 电子科技大学 A++ 081102检测技术与自动化装置 0811005 哈尔滨工业大学 A+ 081102检测技术与自动化装置 0811006 华中科技大学 A+ 081102检测技术与自动化装置 0811007 北京航空航天大学 A+ 081102检测技术与自动化装置 0811008 东北大学 A 081102检测技术与自动化装置9 中国科学技术大学 A 081102检测技术与自动化装置 08110010 华东理工大学 A 081102检测技术与自动化装置 081100系统工程排名学科代码:0811031 华中科技大学 A++ 081103系统工程2 西北工业大学 A++ 081103系统工程3 清华大学 A++ 081103系统工程4 浙江大学 A++ 081103系统工程5 哈尔滨工业大学 A+ 081103系统工程6 东北大学 A+ 081103系统工程7 北京航空航天大学 A+ 081103系统工程8 北京交通大学 A 081103系统工程9 华东理工大学 A 081103系统工程10 天津大学 A 081103系统工程模式识别与智能系统排名学科代码:081104排名校名等级二级学科一级学科学科门1 清华大学 A++ 081104模式识别与智能系统2 上海交通大学 A++ 081104模式识别与智能系统3 西安电子科技大学 A++ 081104模式识别与智能系统4 北京工业大学 A+ 081104模式识别与智能系统5 中国科学技术大学 A+ 081104模式识别与智能系统6 南京理工大学 A+ 081104模式识别与智能系统7 西安交通大学 A 081104模式识别与智能系统8 华东理工大学 A 081104模式识别与智能系统9 浙江大学 A 081104模式识别与智能系统10 同济大学 A 081104模式识别与智能系统导航、制导与控制排名学科代码:0811051 北京航空航天大学 A++ 081105导航、制导与控制2 哈尔滨工业大学 A++ 081105导航、制导与控制3 西北工业大学 A++ 081105导航、制导与控制4 哈尔滨工程大学 A+ 081105导航、制导与控制5 清华大学 A+ 081105导航、制导与控制6 北京理工大学 A 081105导航、制导与控制7 浙江大学 A 081105导航、制导与控制8 华中科技大学 A 081105导航、制导与控制9 中南大学 A 081105导航、制导与控制10 上海交通大学 B+ 081105导航、制导与控制控制理论与控制工程(158)自动化考研专业课所考科目华中科技大学[控制系]428运筹学 429自动控制原理(经典控制理论、现代控制理论) [图像所]424 信号与线性系统 429自动控制原理(含经典控制理论、现代控制理论)431电子技术基础 432数据结构 434计算机组成原理 438物理光学复试: [控制系]专业综合考试。
农用灌溉井房的智能水电双控系统李文;黄可;张清芳;郭凯;徐明刚【摘要】为建立健全农业水价形成机制,提出了一种农用灌溉井房的新型智能水电双控系统.根据实际任务功能需求,系统设计了4层分布式局部闭环结构,分为控制管理层、信息采集层、收费管理层和控制执行层,并采用一张卡实现水电的收费管理.实验结果表明:刷卡成功率可达100%,用水计量准确度等级可达0.5级,电子式电能表准确度等级可达1.0级.系统远程通信加入报文补发机制后,数据上报成功率达到了100%.智能水电双控系统集多层结构为一体,通过用水计量、用电计量和收费管理,实现了农业灌溉自动化.【期刊名称】《河南科技大学学报(自然科学版)》【年(卷),期】2019(040)003【总页数】8页(P72-79)【关键词】水电双控;智能化;分布式结构;嵌入式技术;数据传输【作者】李文;黄可;张清芳;郭凯;徐明刚【作者单位】北方工业大学机械与材料工程学院,北京 100144;北方工业大学机械与材料工程学院,北京 100144;北方工业大学机械与材料工程学院,北京 100144;北方工业大学机械与材料工程学院,北京 100144;北方工业大学机械与材料工程学院,北京 100144【正文语种】中文【中图分类】TP290 引言中国是传统的农业大国,有效灌溉面积达到了6×107 hm2,每年农业灌溉用水大约占到了年总用水量的70%左右,但是目前农业灌溉用水利用因数只有0.45左右,用水效率与发达国家相比较低[1-4]。
现阶段,农用灌溉井房信息化建设缺乏统一规范,智能化程度低,水电费换算、水表计量自动化程度差,很多地区只收灌溉过程中产生的电费而不计取水费,造成农业灌溉用水的浪费和偷用,很大程度上不利于农业水资源的节约和保护[4-9]。
因此,需进一步加强农业灌溉计量设备的智能化和信息化建设,提高农业灌溉用水效率,实现农业灌溉的可持续化发展。
本文针对农用灌溉井房取用水计量和用电设备智能控制要求,设计了基于农用灌溉井房的智能水电双控系统。
实验1(流水灯)
// 串行口工作在方式0下,利用4094串入并出移位寄存器
// 显示流水灯效果
ORG 0000H ;程序从0000开始运行
LJMP MAIN ;跳到主程序
ORG 064H
MAIN: ;主程序循环点亮
MOV SCON, #00H
CLR P3.2
MOV A,#0FEH
MOV SBUF,A
MOV P0, A
LCALL DELAY
LIGHT:
//SETB P3.2
ACALL DELAY
RL A
CLR P3.2
MOV SBUF,A
MOV P0, A
SJMP LIGHT
DELAY:
MOV R5,#20 ;延时子程序1闪烁灯调用
D1: MOV R6,#20
D2: MOV R7,#250
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
RET
END
实验1
ORG 0000H
JMP MAIN
MAIN:
MOV P0,#00H
LCALL DELAY
MOV A,#0FEH
LOOP:
MOV P0,A
LCALL DELAY
RL A
AJMP LOOP
DELAY:
MOV R5,#20
D1: MOV R6,#20
D2: MOV R7,#250
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
RET
END
实验2
;******************************************************************************
**
; 跑马灯试验: 定时器T1方式1控制
*
;
*
; 开机8个灯循环点亮。
*
; 硬件连接:p0口8路指示灯,
*
; 连接方法: JP11(P2)和JP1(LED灯) 用8PIN排线连接起来
*
;******************************************************************************
**
/*
T1,方式1,晶振12MHZ,控制P1.0端口第1秒变换电平1次
TC=65530-50000=15530=3CB0H
*/
ORG 0000H ;程序从0000开始运行
JMP MAIN ;跳到主程序
ORG 001BH ;定时1中断入口地址
LJMP INTRUPT1
ORG 0100H
MAIN: ;主程序循环点亮
MOV P0, #00H ;全亮
MOV R5, #00H ;R5用于中断计数每20次中断为1秒
MOV A, #0FEH ;每次只亮一个灯。
MOV TMOD , #90H ;90H为门控方式,此时INT1高电平时 T1启动
MOV TH1 , #03CH ;装入定时器初值
MOV TL1 , #0B0H
SETB EA ;打开总中断
SETB ET1 ;允许定时器/计数器1 中断
SETB TR1 ;开启定时器/计数器1 中断
AJMP $ ;原地踏步
ORG 0200H
INTRUPT1:
MOV TH1 , #03CH
MOV TL1 , #0B0H
INC R5 ;R5++
CJNE R5 , #20 , LOOP ;每隔20*50MS 一秒后灯变 不等于20则跳转
MOV R5, #00H
MOV P0, A ;输出到p1
RL A ;循环左移。
AJMP LOOP ; 跳转main继续循环
LOOP:
RETI
END
实验3
发送
// 串行口工作在方式0下,利用4094串入并出移位寄存器
// 显示流水灯效果
ORG 0000H ;程序从0000开始运行
LJMP MAIN ;跳到主程序
ORG 064H
MAIN:
MOV TMOD,#20H ;T1方式2
MOV TL1,#0E8H ;波特率
MOV TH1,#0E8H
SETB TR1 ;启动T1
MOV SCON, #40H ;串口方式1
SETB EA
SETB ES
CLR TI ;清发送标志
MOV A, #0FEH ;
TXDAT:
LCALL DELAY
RL A ;左移位
MOV SBUF,A ;发送
JNB TI,$ ;等发送完标志
CLR TI ;清标志
JMP TXDAT ;发送下一个
ORG 0023H ;
JMP STI ;
ORG 300H
STI:
CLR RI ;清标志
JMP TXDAT ;进入发送程序
RETI ;返回中断
DELAY:
MOV R5,#20 ;延时子程序1闪烁灯调用
D1: MOV R6,#20
D2: MOV R7,#250
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
RET
END
接受
// 串行口工作在方式1下,接收端程序?
// 显示流水灯效果
ORG 0000H ;程序从0000开始运行
LJMP MAIN ;跳到主程序
ORG 064H
MAIN:
MOV TMOD,#20H ;T1方式2
MOV TL1,#0E8H ;波特率
MOV TH1,#0E8H
SETB TR1
MOV SCON, #60H ;串口方式1
SETB EA ;允许中断
SETB ES ;开放串口中断
SETB REN ;进入接收状态
CLR RI ;清接收标志
JMP $ ;原地等待
ORG 0023H ;中断入口
JMP RCDAT
ORG 200H
RCDAT:
JNB RI,$ ; 等接收标志为1,表示1帧接收完
CLR RI ; 清接收标志
MOV P0,SBUF ; 接收数据到P0
SJMP RCDAT ;
RETI ;
END
实验4
/*
LED数码管试验 ,阴极管,P0输出
分别用定时器和循环二种方式
实现0~9的循环显示
*/
ORG 000H
SJMP START
ORG 001BH ;定时中断入口地址
LJMP INTE
ORG 064H
START: //////////////////////////使用定时器延时, 先要设置定时器
MOV R0,#00H
MOV R1,#00H
MOV R2,#00H
MOV TMOD , #10H ;90H为门控方式,此时INT1高电平时 T1启动
MOV TH1 , #03CH ;装入定时器初值
MOV TL1 , #0B0H
SETB EA ;打开总中断
SETB ET1 ;允许定时器/计数器1 中断
SETB TR1 ;开启定时器/计数器1 中断
AJMP $ ;原地踏步
///////////////////////////////////////////
INTE: ////中断程序
MOV TH1, #03CH
MOV TL1, #0B0H
INC R0
CJNE R0, #10 , LOOP ;R0大于10(500ms)则向下执行,否则到LOOP处,.
//////以下为定时到要做的事情
MOV R0, #00H
MOV A, R1
MOV DPTR,#TABLE ;将表格地址装入DPTR
MOVC A, @A+DPTR ;查表格第A个数
MOV P0,A ;显示表格第A个数
INC R1 ;
INC R2
MOV P1, R2 ;实现8个数码管轮流显示,试验箱的138译码器接P2.2、P2.3、
P2.4
CJNE R2,#8,LOOP ;
MOV R2, #00H
CJNE R1,#16,LOOP ;R1够10次清零,返回中断
MOV R1, #00H
LOOP:
RETI
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
DB 077H,07cH,039H,05eH,079H,071H,000H,040H
END