基于CAN总线的通信设计与应用
- 格式:pdf
- 大小:285.96 KB
- 文档页数:6

基于单片机的CAN总线通讯实现CAN总线通讯是一种广泛应用于车辆电子系统、工业自动化和机器控制等领域的通讯协议,它具有高可靠性、实时性强和抗干扰能力强等优点。
在基于单片机的CAN总线通讯实现中,单片机作为CAN节点可以通过CAN总线与其他节点进行数据的发送和接收。
一、硬件搭建1.单片机选型在CAN总线通讯实现中,可以选择支持CAN总线的单片机芯片。
常见的单片机有STC12C5A60S2、AT89C51CC03等。
2.CAN总线收发器CAN总线收发器是实现单片机与CAN总线之间相互之间通信的关键组件。
常见的CAN收发器有TJA1050、SN65HVD230等。
3.连接线需要准备好与单片机芯片和CAN总线收发器相适应的连接线,如杜邦线等。
二、软件实现1.硬件初始化首先,在单片机中需要初始化相关的硬件资源,包括引脚设置、定时器设置等。
同时,也需要对CAN总线收发器进行初始化设置。
2.CAN总线配置在单片机中,需要配置CAN总线相关的寄存器,包括波特率设置、帧过滤设置等。
波特率的设置需要与其他CAN节点保持一致才可以正常通信。
3.数据发送单片机向CAN总线发送数据时,首先需要检查发送缓冲区是否为空。
如果不为空,则需要等待缓冲区可用,并将要发送的数据写入到发送缓冲区中。
随后,单片机向CAN总线发送一个请求发送的指令,然后等待发送完成的中断信号。
4.数据接收单片机接收CAN总线数据时,需要首先检查接收缓冲区是否为空。
如果接收缓冲区有数据,则单片机将读取缓冲区数据,并进行数据的处理。
5.中断处理CAN总线通讯中,可以通过中断的方式来处理数据的发送和接收。
单片机通过设置相关中断触发源和中断服务程序来实现数据的异步传输。
三、通讯协议CAN总线通讯中,可以使用标准CAN和扩展CAN两种协议。
标准CAN协议使用11位标识符,扩展CAN协议使用29位标识符。
在通讯过程中,需要设置相关的协议参数,包括标识符、数据长度码、帧类型等。

CAN总线数据通讯功能设计摘要:近年来,社会进步迅速,我国的智能化建设的发展也有了改善。
CAN(ControllerAreaNtework)即控制器局域网络,最初是由德国的BOSCH公司为汽车监测、控制系统而设计的。
现代汽车越来越多采用电子装置控制,如发动机的定时、注油控制、加速、刹车、自动泊车、倒车雷达及复杂的制动防抱死系统(ABS)等。
这些电子装置的控制需实时检测及交换大量的数据,仅使用传统点对点的连接方式来实现子系统之间的随机通信,不但繁琐、昂贵,且难以解决问题。
采用CAN总线上述问题就能得以很好的解决。
因为CAN总线为多主站总线,各节点可在任意时刻向网络上的其他节点发送信息,不分主次,通信灵活;采用短帧结构,数据传输时间短,最大传输数率可达1Mbps(通信距离小于40m)。
CAN总线技术由于高性能、高可靠性及其独特的设计备受人们的重视,经过十几年的发展,该技术已成为所有车载电子控制系统互联、互通的标准,广泛应用于汽车电子监测系统。
关键词:CAN总线;数据通讯;功能设计引言随着汽车的普及,人们对汽车舒适度要求越来越高,使得汽车电子技术发展迅速,越来越多的汽车电子控制单元(ElectronicControlUnit,ECU)被应用于汽车控制。
诊断功能的实现是ECU开发过程中的重要部分,对诊断功能进行集成测试是为了验证功能实现与设计规范的一致性。
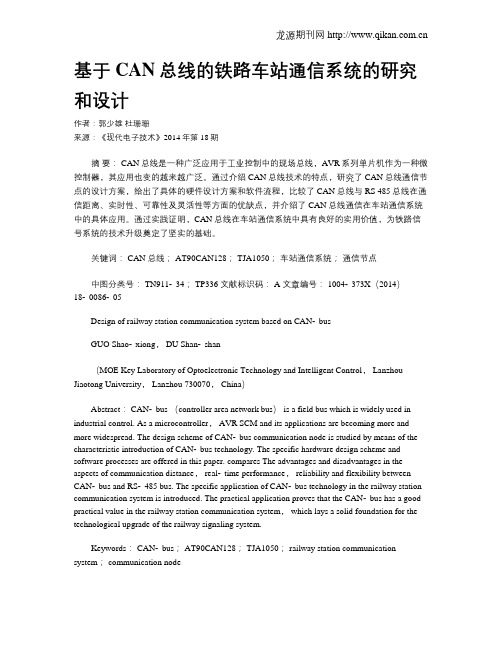
1方案的实现电路主要由四个部分构成:微控制器、独立CAN通信控制器、CAN总线收发器、高速光耦。
微控制器负责CAN通信控制器的初始化。
CAN通信控制器有发送和接收两端,它能够同时读写总线,这个功能对于错误检测与总线仲裁都很重要,因此通过控制CAN通信控制器实现数据的接收和发送通讯任务。
CAN通信控制器要通过CAN总线收发器上的线驱动器和总线接口进行总线的读写,总线是通过典型的双绞线传输差分电压信号,处理CAN总线两端的节点应设置跨接在两根双绞线间的终端匹配电阻。

CAN总线通讯基于51单片机应用第一章前言1.1 概述控制器局域网(CAN-Controller Area Network)属于现场总线(Fieldbus)的范畴,是众多的属于现场总线标准之一,它适用于工业控制系统,具有通信速率高、可靠性强、连接方便、性能价格比高等诸多特点。
它是一种有效支持分布式控制或实时控制的串行通信网络,以其短报文帧及CSMA/CD-AMP(带有信息优先权及冲突检测的载波监听多路访问)的MAC(媒介访问控制)方式而倍受工业自动化领域中设备互连的厚爱。
CAN的应用范围遍及从高速网络到低成本的多线路网络,它可以应用于汽车系统、机械、技术设备和工业自动化里几乎任何类型的数据通信。
随着计算机硬件、软件及集成电路技术的迅速发展,同时消费类电子产品、计算机外设、汽车和工业应用等的需求不断增加。
高速、高可靠和低成本的通信介质的要求也随之提高。
现场总线是当今自动化领域技术发展的热点之一,它为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
微处理器中常用的串行总线是通用异步接收器传输总线(UART)、串行通信接口(SCI)、同步外设接口(SPI)、内部集成电路(I2C)和通用串行总线(USB),以及车用串行总线,包括控制器区域网(CAN)和本地互连网(LIN)等。
这些总线在速度、物理接口要求和通信方法学上都有所不同。
在计算机数据传输领域内,长期以来使用的通信标准,尽管被广泛使用,但是无法在需要使用大量的传感器和控制器的复杂或大规模的环境中使用。
控制器局部网CAN(CONTROLLER AERANETW0RK)就是为适应这种需要而发展起来的。
随着汽车电子技术的发展,消费者对于汽车功能的要求越来越多,汽车上所用的电控单元不断增多,电控单元之间信息交换的需求,使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线,这就促进了车用总线技术的发展。
CAN 总线的出现,就是为了减少不断增加的信号线,所有的外围器件都可以被连接到总线上由于CAN总线具有可靠性高、实时性好、成本合理等优点,逐渐被应用于如船舶、航天、工业测控、自动化、电力系统、楼宇监控等其他领域中。

基于CAN总线技术的主从式通信系统
基于CAN总线技术的主从式通信系统是一种常用的现代工业
通信技术,用于实现工业自动化控制中的数据传输和信息交换。
这种系统由一个主控制器和多个从控制器组成,主控制器控制整个系统的通信过程,而多个从控制器则负责采集和处理数据,并向主控制器发送反馈数据或执行指令。
CAN总线技术是控制领域中的一种通讯协议,它可以实现实
时数据传输和可靠的错误检测,确保信息的高效传输。
这种协议在航空、汽车、电力、机器人等领域广泛应用,使得设备之间的通信更加协调和高效。
主从式通信系统将主控制器和从控制器集成在同一总线中,可以避免相互之间的干扰和冲突。
主控制器可以对整个系统进行控制和调度,从控制器则负责采集和处理实时数据。
在这种分布式系统中,从控制器的作用是根据主控制器的指令进行数据处理,并将调度后的数据再次返回到主控制器,从而实现联动控制。
基于CAN总线技术的主从式通信系统还具有以下优势:
1. 通信速度快:CAN总线技术支持高速传输,可以实现以微
秒为级别的通信速度,处理大量数据时,系统响应速度快。
2. 数据安全可靠:CAN总线技术具有自适应控制、错误检测
和纠错功能,可保证数据传输的准确性和可靠性,并能够防止数据丢失。
3. 灵活配置:主从式通信系统可以根据不同的工业自动化控制需求灵活配置,支持增加或删除节点,可以满足不断变化的自动化控制需求。
4. 易于维护:主从式通信系统采用统一的协议和通信方式,使得维护和更换通信硬件设备更加方便和快捷。
总之,基于CAN总线技术的主从式通信系统是一种高效、便捷和可靠的通信技术,它可以使工业自动化控制的数据传输和信息交换更加顺畅和高效。
工业技术科技创新导报 Science and Technology Innovation Herald92DOI:10.16660/ki.1674-098X.2019.18.092基于CAN总线的柴油机通信模块设计与实现代宏泽(株洲中车时代电气股份有限公司技术中心 湖南株洲 412001)摘 要:开发了一种基于CAN总线的内燃机车柴油机控制模块,重点介绍了硬件的模块化设计、功能的实现方式及CAN总线在模块中的应用。
该模块实现了机车微机与柴油机控制器相互间的数据交换,能够完成包括4~20mA电流、PWM脉冲频率、PWM占空比等多种方式的柴油机转速调节、数字信号采集、触点输出等多种功能,已验证应用,具有良好的可靠性。
关键词:CAN总线 硬件设计 机车控制 转速调节 柴油机中图分类号:TN919 文献标识码:A 文章编号:1674-098X(2019)06(c)-0092-03柴油机是内燃机车的核心部件,目前,大部分柴油机控制器ECU都是通过CAN总线与外部设备进行数据交换。
内燃微机控制系统LCS是整车控制系统,它的主CPU 通过背板并行总线与各种IO模块进行数据交换,并通过Lonworks或者MVB总线与机车上的显示器通信,所以,柴油机ECU和机车控制系统、显示器之间没有直接的数据交换方式。
因此,如何实现机车控制系统LCS对柴油机的控制?如何将柴油机的各种参数人机交互至显示器上?本文开发的柴油机通信模块就能够解决上述问题。
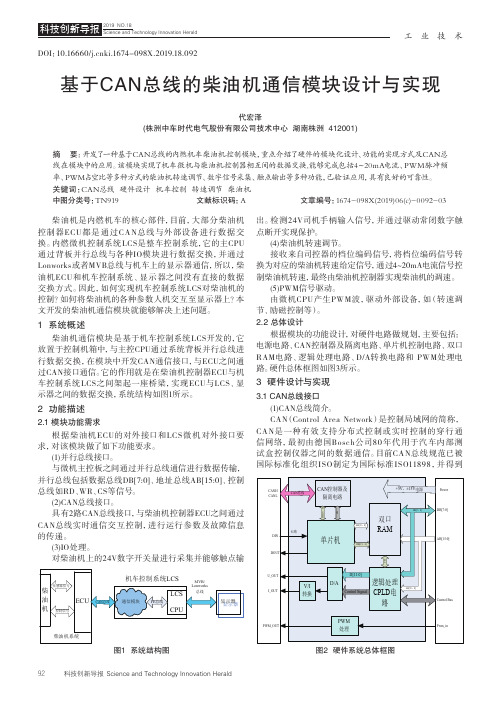
1 系统概述柴油机通信模块是基于机车控制系统LCS开发的,它放置于控制机箱中,与主控CPU通过系统背板并行总线进行数据交换,在模块中开发CAN通信接口,与ECU之间通过CAN接口通信。
它的作用就是在柴油机控制器ECU与机车控制系统LCS之间架起一座桥梁,实现ECU与LCS、显示器之间的数据交换,系统结构如图1所示。
2 功能描述2.1 模块功能需求根据柴油机ECU的对外接口和LCS微机对外接口要求,对该模块做了如下功能要求。
基于CAN总线的铁路车站通信系统的研究和设计作者:郭少雄杜珊珊来源:《现代电子技术》2014年第18期摘要: CAN总线是一种广泛应用于工业控制中的现场总线,AVR系列单片机作为一种微控制器,其应用也变的越来越广泛。
通过介绍CAN总线技术的特点,研究了CAN总线通信节点的设计方案,给出了具体的硬件设计方案和软件流程,比较了CAN总线与RS 485总线在通信距离、实时性、可靠性及灵活性等方面的优缺点,并介绍了CAN总线通信在车站通信系统中的具体应用。
通过实践证明,CAN总线在车站通信系统中具有良好的实用价值,为铁路信号系统的技术升级奠定了坚实的基础。
关键词: CAN总线; AT90CAN128; TJA1050;车站通信系统;通信节点中图分类号: TN911⁃34; TP336 文献标识码: A 文章编号: 1004⁃373X(2014)18⁃0086⁃05Design of railway station communication system based on CAN⁃busGUO Shao⁃xiong, DU Shan⁃shan(MOE Key Laboratory of Optoelectronic Technology and Intelligent Control, Lanzhou Jiaotong University, Lanzhou 730070, China)Abstract: CAN⁃bus (controller area network bus) is a field bus which is widely used in industrial control. As a microcontroller, AVR SCM and its applications are becoming more and more widespread. The design scheme of CAN⁃bus communication node is studied by means of the characteristic introduction of CAN⁃bus technology. The specific hardware design scheme and software processes are offered in this paper. compares The advantages and disadvantages in the aspects of communication distance, real⁃time performance, reliability and flexibility between CAN⁃bus and RS⁃485 bus. The specific application of CAN⁃bus technology in the railway station communication system is introduced. The practical application proves that the CAN⁃bus has a good practical value in the railway station communication system, which lays a solid foundation for the technological upgrade of the railway signaling system.Keywords: CAN⁃bus; AT90CAN128; TJA1050; railway station communication system; communication node车站通信系统应用于铁路车站,用以交互室内与室外的信息,实现行车指挥,保证站内列车或调车车列运行时不发生追尾、迎面相撞、侧面冲突等事故。
CANopen协议讲解CANopen是一种基于CAN总线的通信协议,用于工业自动化领域中设备之间的数据交换和控制。
它是由CAN in Automation (CiA)组织开发和维护的,目前已成为工业领域最常用的开放式通信协议之一。
本文将详细介绍CANopen协议的基本原理、通信结构、数据通信方式以及应用领域等内容。
1. CANopen协议的基本原理CANopen协议基于CAN总线,采用了面向对象的通信模型。
它将设备抽象为对象,每个对象具有唯一的标识符,通过读写对象字典中的数据来实现设备之间的通信。
CANopen协议还定义了一套标准的通信服务和对象类型,使得不同厂商的设备可以互相兼容和交互。
2. CANopen协议的通信结构CANopen协议采用了主从式的通信结构,其中一个节点作为主节点,其他节点作为从节点。
主节点负责控制总线的访问和数据传输,从节点负责接收和响应主节点的指令。
主节点和从节点之间的通信通过报文进行,包括数据报文和远程帧。
3. CANopen协议的数据通信方式CANopen协议支持多种数据通信方式,包括点对点通信、广播通信和组播通信。
点对点通信是指主节点与特定从节点之间的通信,广播通信是指主节点向所有从节点发送相同的指令,组播通信是指主节点向特定组内的从节点发送指令。
4. CANopen协议的对象字典CANopen协议使用对象字典来存储设备的数据和配置信息。
对象字典是一个由多个对象组成的数据结构,每个对象包含了标识符、数据类型、访问权限等信息。
通过读写对象字典中的数据,可以实现设备之间的数据交换和控制。
5. CANopen协议的应用领域CANopen协议广泛应用于工业自动化领域,包括机械设备、工厂自动化、物流系统等。
它提供了可靠的数据传输和实时性能,适用于各种复杂的控制和监测应用。
CANopen协议还支持设备的配置和诊断功能,使得系统维护和故障排除更加方便。
总结:CANopen协议是一种基于CAN总线的通信协议,用于工业自动化领域中设备之间的数据交换和控制。
can 通讯程序案例Can 通讯程序案例一、简介Can 通讯程序是指基于CAN(Controller Area Network)总线的通信协议,用于在各种设备之间进行数据传输和通信。
CAN总线是一种常用的实时通信总线,广泛应用于汽车电子、工业控制、航空航天等领域。
Can 通讯程序可以实现设备之间的数据交换、命令传递和状态监测等功能,提高通信效率和可靠性。
二、Can 通讯程序案例1. 汽车电子控制单元(ECU)通信Can 通讯程序可用于汽车电子控制单元之间的通信,如发动机控制单元、车身电控单元、仪表盘控制单元等之间的数据交换和命令传递,实现车辆的各项功能和状态监测。
2. 工业自动化系统通信Can 通讯程序可用于工业自动化系统中各个设备之间的通信,如PLC(可编程逻辑控制器)、传感器、执行器等之间的数据传输和命令控制,实现工业生产过程的自动化和监控。
3. 航空航天领域通信Can 通讯程序在航空航天领域中广泛应用,用于各个航空电子设备之间的通信,如飞行控制系统、导航系统、通信系统等之间的数据传输和状态监测,确保航空器的安全和可靠性。
4. 医疗设备通信Can 通讯程序可用于医疗设备之间的通信,如医疗监护仪、手术机器人、药物输送系统等之间的数据交换和命令传递,实现医疗过程的智能化和实时监测。
5. 物联网设备通信Can 通讯程序可以支持物联网设备之间的通信,如智能家居设备、智能城市设备、智能交通设备等之间的数据传输和远程控制,实现物联网系统的互联互通。
6. 军事装备通信Can 通讯程序在军事装备中有重要应用,如军用车辆、战斗机、导弹系统等之间的数据交换和命令传递,实现军事装备的智能化和协同作战。
7. 电力系统通信Can 通讯程序可用于电力系统中各个设备之间的通信,如电力传感器、电力负荷管理系统、电力监控系统等之间的数据传输和命令控制,实现电力系统的智能化和远程监测。
8. 铁路信号系统通信Can 通讯程序在铁路信号系统中起到重要作用,如列车控制系统、信号传输系统、轨道检测系统等之间的数据交换和状态监测,确保铁路运输的安全和效率。
基于单片机的CAN总线通讯实现CAN(Controller Area Network)总线是一种现代的串行通信总线,广泛应用于汽车电子系统和工控领域。
它具有高可靠性、抗干扰能力强、高速传输、多节点连接等特点,成为实时控制系统的首选通信方式。
实现基于单片机的CAN总线通讯,需要经过以下几个步骤:1.硬件准备:选择合适的CAN控制器和单片机,常用的CAN控制器有MCP2515、SJA1000等。
接下来需要连接CAN控制器和单片机,包括连接CAN高低线路、配置引脚等。
2.引脚配置:根据所使用的单片机和CAN控制器的规格,配置相应的引脚。
通常需要配置CAN_TX、CAN_RX引脚,同时还需要配置中断引脚。
3. 初始化CAN总线:初始化CAN总线的过程包括设置波特率、模式选择、滤波器设置等。
波特率是通信的重要参数,需要保证发送和接收端的波特率一致,通常使用比较常见的波特率如500kbps。
4.发送数据:CAN总线通信是基于消息的,发送数据需要构建CAN消息帧。
消息帧包括标识符、数据长度、数据内容等。
在发送数据之前,需要准备好发送的数据,并将数据放入CAN消息帧中,最后将消息帧发送到总线上。
5.接收数据:接收数据需要配置CAN总线的工作模式和接收过滤器。
当有数据从总线上接收时,CAN控制器将数据存入接收缓冲器,并产生中断或者置位标志位来提醒主控处理接收到的数据。
6.数据处理:接收到的数据可以根据需要进行处理,包括解析、判断、存储等。
根据数据的标识符和长度等信息,可以将数据分发给不同的处理程序进行处理。
7.错误处理:在CAN总线通信过程中,可能会出现数据错误、通信超时等问题。
需要设置相应的错误处理机制,包括错误标志位的监测、错误计数器的清零等。
8.电源管理:在使用CAN总线通信时,需要合理管理系统的功耗和电源。
对于低功耗应用,可以将CAN控制器和单片机配置为睡眠模式,待接收到唤醒信号后再恢复正常工作。
总结:基于单片机的CAN总线通讯实现需要进行硬件准备、引脚配置、初始化CAN总线、发送数据、接收数据、数据处理、错误处理和电源管理等一系列步骤。
CAN总线的原理及使用教程一、CAN总线的原理1.数据链路层:CAN总线采用的是二进制多播通信方式,即发送方和接收方之间没有直接的连接关系,所有节点共享同一个总线。
在一个CAN总线系统中,每个节点都可以发送和接收信息。
当一个节点发送消息时,所有其他节点都能接收到该消息。
2.帧格式:CAN总线使用的是基于帧的通信方式,每个消息都被封装在一个CAN帧中。
帧由起始标志、ID、数据长度码、数据和校验字段组成。
其中,ID是唯一标识符,用来区分不同消息的发送者和接收者。
数据长度码指示了消息中数据的长度。
校验字段用于检测数据的完整性。
3. 传输速率:CAN总线的传输速率可根据需求进行配置,通常可选的速率有1Mbps、500Kbps、250Kbps等。
高速传输速率适用于对实时性要求较高的应用,而低速传输速率适用于对实时性要求不高的应用。
4.错误检测:CAN总线具有强大的错误检测能力,能够自动检测和纠正错误。
它采用了循环冗余校验(CRC)算法,通过对数据进行校验,确保数据的完整性。
如果数据传输过程中发生错误,接收方能够检测到错误,并通过重新请求发送来纠正错误。
二、CAN总线的使用教程1. 硬件连接:在使用CAN总线之前,需要先进行硬件连接。
将所有节点的CANH和CANL引脚连接到同一个总线上,并通过双终端电阻将CANH和CANL引脚与Vcc和地连接。
确保所有节点的通信速率和电气特性相匹配。
2.软件设置:使用相应的软件工具对CAN总线进行配置。
根据具体需求,设置通信速率、总线负载、数据帧格式等参数。
还需要为每个节点分配唯一的ID,用于区分发送者和接收者。
3.数据传输:使用软件工具编写代码,实现消息的发送和接收。
发送消息时,需要指定ID、数据长度和数据内容。
接收消息时,需要监听总线上的消息,并根据ID判断是否为自己需要的消息。
通过合理的逻辑处理,实现节点之间的数据交换和通信。
4.错误处理:CAN总线在数据传输过程中可能会发生错误,如位错误、帧错误等。