一种太阳方位跟踪器控制系统的设计
- 格式:pdf
- 大小:297.70 KB
- 文档页数:5
太阳能自动跟踪发电控制系统的开发与设计摘要:当前,由于技术条件限制,光伏发电的转换效率很低,严重制约了太阳能发电的发展与普及,因此,在现有条件下,寻求一种实用的方式去提高太阳能的发电效率是非常必要的。
实践证明,太阳能的发电效率和太阳能电池板与太阳光线的角度有很大关系,太阳能发电中,太阳能电池板实时和太阳光线保持垂直能在很大程度上提高太阳能的发电效率。
本文针对如何提高太阳能发电效率的问题,提出了采用自动跟踪的方法,让自动跟踪系统对太阳的运动轨迹作出实时判断,从而使太阳能电池板实时和太阳光线保持垂直,提高光伏转换效率。
关键词:太阳能;自动跟踪;发电控制系统;开发与设计中图分类号:tk511 文献标识码:a 文章编号:1.引言地球上,无论何处都有太阳能,可以就地开发利用,不存在运输问题。
同时,太阳能也是一种洁净的能源,在开发和利用时,不会产生废渣、废水、废气,也没有噪音,更不会影响生态平衡。
但是,太阳能的利用有它的缺点:一是能流密度较低,日照较好的,地面上1平方米的面积所接受的能量只有1千瓦左右。
往往需要相当大的采光集热面才能满足使用要求,从而使装置地面积大,用料多,成本增加。
二是受大气影响较大,给使用带来不少困难。
本文设计一种基于gps定位及太阳方位计算的的太阳自动跟踪装置,该装置能自动跟踪太阳的运动,保证太阳能设备的能量转换部分所在平面始终与太阳光线垂直,提高设备的能量利用率。
与此同时加以风力发电机辅助发电给蓄电池充电,进而在夜间给路灯提供电源。
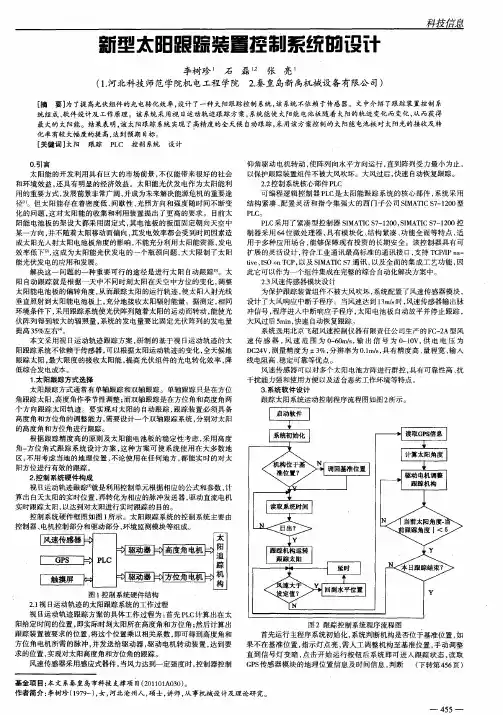
2 太阳能自动跟踪系统硬件设计2.1 太阳能自动跟踪系统的机械构成及工作原理太阳能自动跟踪系统的机械结构由太阳能电池板、减速电机、齿轮传动机构、基座等构成。
基座主要支撑和固定太阳能自动跟踪器。
当太阳照射角度发生变化时,垂直方向(y)和水平方向(x)的减速电机就会相应的通电转动,通过齿轮机构传动使太阳能电池板始终与太阳光线垂直,即获取到最大的太阳光照能量。
整个装置由机械部分和控制部分组成。
DOI:10.16660/ki.1674-098X.2019.08.118基于光强感知的太阳跟踪系统设计①顾俊林 张同杰 王梓毅 杜祎倩(中国民航大学电子信息与自动化学院 天津 300300)摘 要:太阳能作为一种新兴无污染的可再生能源,近些年来受到人们的广泛关注。
太阳位置的变化会导致太阳能板表面光照强度的变化,对发电效率的影响较大。
为解决上述问题,本文设计了一种能够自动追踪太阳位置的高效率光伏充电系统。
通过光强感知模块检测太阳的实际位置来控制转台的水平与垂直方向的转动角度,调整光伏电池板使其跟随太阳位置变化而移动,实现太阳光能转化效率的最大化。
关键词:光强感知 太阳能 自动追踪中图分类号:TP212.9 文献标识码:A 文章编号:1674-098X(2019)03(b)-0118-02①课题来源:“中国民航大学大学生创新创业训练计划”项目研究成果(项目编号:201810059031)。
作者简介:顾俊林(1998,2—),男,汉族,江苏盐城人,本科在读,研究方向:光伏发电。
光伏发电具有清洁性、安全性、经济性以及免维护性等显著优点[1]。
目前,太阳能电池板一般采取固定安装方式,无法保证太阳光实时垂直照射,导致太阳能资源无法得到充分利用[2-3]。
为进一步提高太阳能的转换效率,本文设计了一种可以自动跟随太阳光照的装置,保证太阳能电池板所在的平面始终与太阳光线垂直,从而提高设备的发电效率。
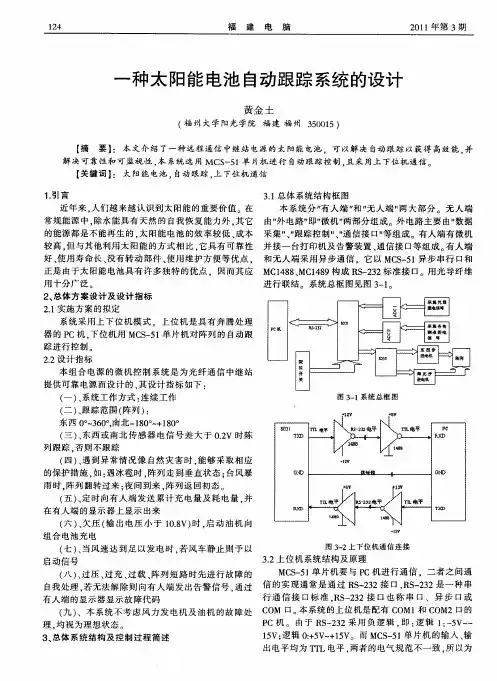
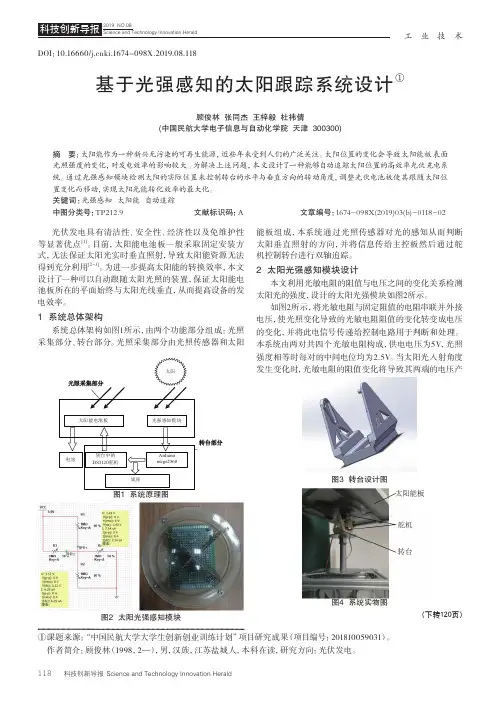
1 系统总体架构系统总体架构如图1所示,由两个功能部分组成:光照采集部分、转台部分。
光照采集部分由光照传感器和太阳能板组成,本系统通过光照传感器对光的感知从而判断太阳垂直照射的方向,并将信息传给主控板然后通过舵机控制转台进行双轴追踪。
2 太阳光强感知模块设计本文利用光敏电阻的阻值与电压之间的变化关系检测太阳光的强度,设计的太阳光强模块如图2所示。
如图2所示,将光敏电阻与固定阻值的电阻串联并外接电压,使光照变化导致的光敏电阻阻值的变化转变成电压的变化,并将此电信号传递给控制电路用于判断和处理。
太阳能跟踪系统设计摘要太阳能作为一种可以永续使用的绿色可再生能源,有着巨大的开发应用潜力。
但由于光伏电池的输出特性与外界环境因素的变化有很大关系,目前大规模量产的光伏电池光电转换效率仍然不高且价格昂贵。
光伏发电自动跟踪装置是提高太阳能利用率,降低光伏发电成本的有效途径。
研究精确的太阳跟踪装置,可使光伏电池板接收到更多的太阳辐射能量,增加发电量。
本文实现了用廉价的光敏元件和单片机电路进行太阳跟踪的功能。
分析了太阳运行规律,在对比目前常用跟踪方法的基础上,改进了以往的跟踪方式。
提出将光电跟踪作为主要跟踪方式,视日运动轨迹跟踪方式作为特殊天气情况下补充跟踪方式的方案。
通过两种跟踪方式互补,一方面可以充分发挥光电跟踪准确性高的优势,另一方面在阴天等天气条件下仍能实现跟踪。
此外,为了确保跟踪的结果准确,在方位角和高度角调整之后,增加了一组传感器电路进行跟踪结果的验证。
通过对控制系统所实现的功能分析,论文完成了跟踪系统的硬件和软件设计。
主要内容包括:单片机接口电路设计、光强检测电路设计、控制执行部件设计以及光电跟踪和视日运动轨迹跟踪模块的软件设计。
完成了跟踪系统试验装置的制作。
本文所设计的光伏发电自动跟踪系统结构简单,成本低廉,运行稳定,可广泛应用于并网和离网光伏发电系统。
关键词光伏发电,单片机,光强检测,自动跟踪I沈阳工程学院毕业设计(论文)AbstractThe solar energy has ail enormous developing application capacity as one kind of green renewable energy source which Call be continuously used forever.But there is tremendous relationship between photovoltalc cellsoutput characteristies and the change of external environmental factors,currently the efficiency of PV cells is not only low but also expensive on a large scale of production.The photovoltaic automatically tracking device can raise the solar energy utilization rate and bring down the cost of the solar electrical energy generation.Precise solar tracking mechanism can make solar panel receive more radiant energy and increase generating capacity.This paper makes to realize the function of sun tracking.Use of cheap photo sensors and MCU circuit.Analyzed the law of the sun, compared the current tracking methods,and improved the previous tracking mode.Proposed electro opticaltracking as the major tracking mode while the sun trajectory tracking mode as additional tracking mode on unusual weather conditions.Through two complementarytracking modes,on the one hand,electro-optical tracking can give play to the advantages of high accuracy;on the other hand,the system can still achieve tracking on cloudy weather conditions.In addition,In order to guarantee that the track result is accurate.after azimuth and elevation angle adjustment,increased a group of sensor electric circuit to CatTy on the track result confirmation.Through the implementation of functional analysis of control system,the thesis completed hardware and software design of the tracking device.Include:MCUinterface cuit design,optical detector circuit design,control and implementation component design and the software design of electro―optical tracking and sall trajectory tracking module.The tracking system test equipment manufacture is completed.The experimental results showed that,the system could fully realize the tracking of the sun.Finally,proposed improvement program and new method to treat fast cloud according to thetracking effect of the trial.In this paper,the designs of photovoltaic automatic tracking device have simple structure,low cost and stable operation.The device cail be widely applied to grid and off-grid PV power system.Keywords photovoltaic,MCU, light intensity detect, automatictrackingII太阳能跟踪系统设计目录摘要 ........................................................................... .. (I)Abstract ..................................................................... ...............................................................II 1 引言 ........................................................................... ............................................................1 1.1 光伏发电的特点 ........................................................................... ..............................1 1.1.1 光伏发电的优点 ........................................................................... .....................1 1.1.2 光伏发电存在的问题 ........................................................................... .............1 1.2 光伏发电自动跟踪技术 ........................................................................... .................2 1.3 本文主要完成的工作 ........................................................................... .....................2 2 太阳跟踪方法及策略 ........................................................................... .............................3 2.1 太阳运动轨迹对太阳能发电的影响 (3)2.1.1 太阳赤纬角 ........................................................................... ..............................3 2.1.2 计算太阳高度和太阳方位 ........................................................................... ....4 2.2 太阳运动轨迹的跟踪方式 ........................................................................... ............5 2.2.1 单轴跟踪 ........................................................................... ...................................5 2.2.2 双轴跟踪 ........................................................................... ...................................6 2.2.3 视日运动轨迹跟踪与光电跟踪相结合 .........................................................6 2.3 控制系统总体设计.....................................................................................................7 2.3.1 控制系统所要实现的功能分析 (7)2.3.2 控制系统的工作过程 ........................................................................... .............8 2.3.3 机械执行装置 ........................................................................... ..........................8 3 自动跟踪系统的硬件设计 ........................................................................... .................. 10 3.1 控制系统硬件总体设计 ........................................................................... .............. 10 3.2 控制系统核心部件的选择 ........................................................................... ......... 11 3.3 光强检测电路设计 ........................................................................... ...................... 13 3.4 单片机接口电路设计 ........................................................................... .................. 15 3.4.1 电源电路 ........................................................................... . (15)III沈阳工程学院毕业设计(论文)3.4.2 串口通信电路 ........................................................................... ....................... 16 3.4.3 模拟量转换电路 ........................................................................... .................. 17 3.4.4 看门狗和晶振 ........................................................................... ....................... 18 3.4.5 实时时钟电路 ........................................................................... ....................... 19 3.5 控制执行部件设计 ........................................................................... ...................... 20 3.5.1 步进电机驱动控制系统 ........................................................................... ..... 20 3.5.2 本系统所采用的步进电机及驱动模块 ...................................................... 21 3.6 整体电路图的设计 ........................................................................... ...................... 22 4 系统软件流程及调试 ........................................................................... .......................... 24 4.1 主控制模块的软件设计 ........................................................................... .............. 24 4.2 光电跟踪模块程序设计 ........................................................................... .............. 25 4.3 视日运动轨迹跟踪模块程序设计 (26)5 结论 ........................................................................... ......................................................... 27 6 致谢 ........................................................................... ......................................................... 28 7 参考文献 ........................................................................... ................................................ 29 8 附录 ........................................................................... (30)IV太阳能跟踪系统设计1 引言1.1 光伏发电的特点1.1.1 光伏发电的优点光伏发电技术(Photovoltaic)是将太阳能转化为电能的技术,其核心是可释放电子的半导体物质。
【方案介绍】太阳追踪控制系统摘要本文主要介绍针对集热器测试系统中集热器转台跟踪太阳方位角、高度角的控制系统追踪原理及示意图。
【关键词】集热器追踪系统太阳追踪转台控制方位角高度角俯仰电机方位电机一、概述该控制系统主要针对集热器测试系统中集热器转台跟踪太阳方位角、高度角。
控制分手操控和自动控两种方式:自动方式:自动跟踪方式主要完成的功能是根据当地的地理位置和时间,利用天文学公式计算的到跟踪器的方位角和俯仰角,并由此控制方位电机和俯仰电机。
跟踪器每10秒做一次跟踪计算以修正方位角和俯仰角。
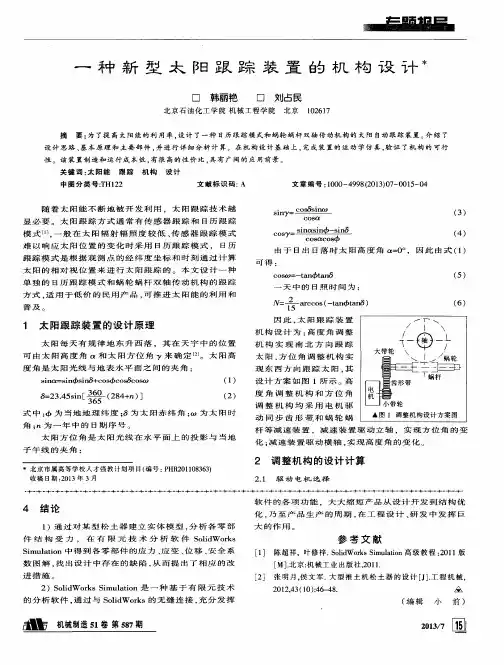
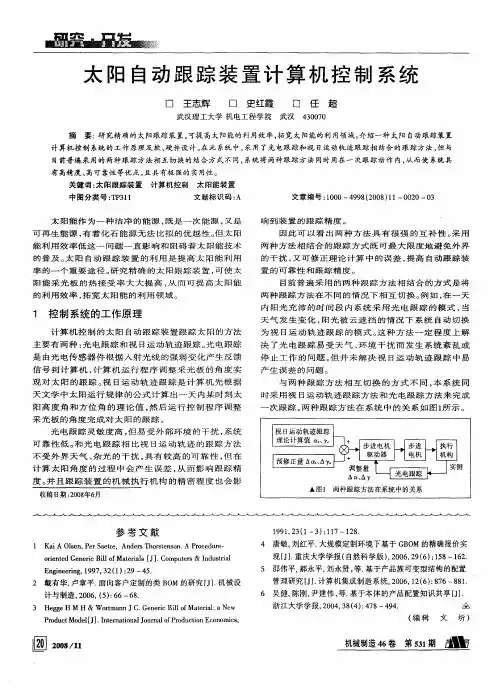
手动模式:通过手操盒控制方位电机和俯仰电机二、追踪原理图一地平坐标系根据球面三角形的余弦定律可求得太阳的高度角和方位角:高度角 α=arcsin(sinΦsinδ+cosΦcosδcosω)方位角 β=arcsin(cosδcosω/cosα)式中:Φ-当地纬度,δ-太阳赤纬角,ω-太阳时角由坐标计算公式可知,太阳轨迹位置只由观测点的地理位置和标准时间来确定。
初始化安装时,俯仰轴和方位轴的初始位置和地理南北线重合,指向北方,通过水平校准仪器使设备底座保持水平。
在应用中,全球定位系统可为系统提供精度很高的地理经纬度和当地时间,控制系统则根据提供的地理、时间参数确定太阳的实时位置,以保证系统准确定位和跟踪的高准确性和高可靠性。
控制系统根据计算的太阳轨迹,每隔几秒钟发送位置指令给驱动器,实现方位角和俯仰角的调整。
机械末端安装有编码器,检测实际角度,如果实际角度没有达到,控制系统计算出偏差后在进行校正。
日落后,跟踪系统停止工作,并返回到初始位置,第二天继续跟踪。
三、系统示意图四、设备图片五、总结经试验测试,本装置能够根据输入计算的角度,做很好的跟随运动,并且控制精度高,稳定性好,能够完全满足本类装置对运动控制的需求。