运动控制算法轨迹规划 ppt课件
- 格式:ppt
- 大小:1.79 MB
- 文档页数:35

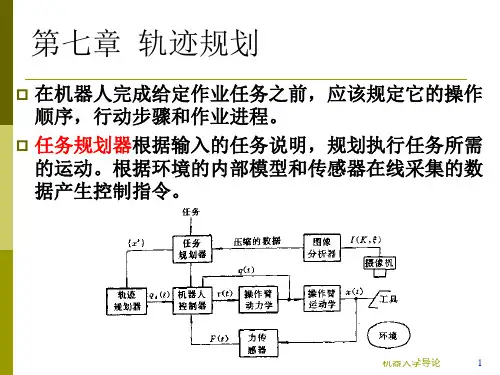
运动控制器运动轨迹控制与路径规划方法解析运动控制器:运动轨迹控制与路径规划方法解析运动控制器在现代工业领域中起着至关重要的作用。
它被广泛应用于机器人、自动化生产线以及机械系统等领域,用于实现精确的运动控制和路径规划。
本文将深入解析运动控制器的原理和常用的运动轨迹控制与路径规划方法。
一、运动控制器的原理运动控制器是一种用于控制和管理运动系统的电子设备。
它通常包含一系列传感器、执行器和控制算法,用于监测和控制运动系统的位置、速度、加速度等参数。
其基本原理是通过传感器采集系统的状态信息,运用控制算法计算控制指令,并将指令传递给执行器实现对运动系统的控制。
二、运动轨迹控制方法1. 基于PID控制的运动轨迹控制方法PID控制是一种经典的闭环控制方法,它通过比较期望位置与实际位置的误差,计算出合适的控制输出。
在运动轨迹控制中,PID控制常用于单个轴或简单的轨迹控制。
具体流程为:首先,通过传感器获取当前位置信息;然后,计算期望位置与实际位置的误差;最后,根据误差值计算PID控制输出,控制执行器实现运动控制。
2. 基于轨迹生成的运动轨迹控制方法在复杂的运动系统中,通过一系列的位置点轨迹来描述运动路径更为合适。
这种方法需要根据运动路径的特点生成一个完整的轨迹,然后运动控制器通过控制执行器按照该轨迹进行运动。
常用的方法有样条曲线插值和直线段插值等。
三、路径规划方法路径规划是指在给定的环境中,根据机器人或运动系统的起点和终点,计算出一条最优路径的过程。
在复杂的工业环境中,路径规划需要考虑到障碍物、路径长度等因素。
以下是常见的路径规划方法:1. A*算法A*算法是一种经典的启发式搜索算法,常用于路径规划。
它通过评估每个点到终点的估计代价来搜索最优路径。
A*算法是一种兼顾了追求最短路径和搜索效率的算法,因此在很多实际应用中得到了广泛应用。
2. RRT算法基于快速探索树(RRT)的路径规划算法利用树结构快速生成路径。
通过一系列的随机抽样和添加节点,RRT算法能够生成大量的路径样本,并在不断优化的过程中找到最优路径。