蛙人水下信息系统发展综述_白峻
- 格式:pdf
- 大小:241.07 KB
- 文档页数:4
无人水下潜航器(UUV)最早出现于20世纪60年代。
在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。
近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。
美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示。
表1 不同级别UUV任务需求优先级美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查;⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战;⑨时敏打击。
不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。
UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。
根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。
图1 UUV主要声呐装备通信声呐主要用于UUV与协同行动的其他UUV、母船(艇)或通信浮标之间的信息链接;导航声呐为UUV的安全航行和执行作业任务提供其位置、航向、深度、速度和姿态等信息;探测声呐主要用于警戒、探测、识别水中或沉底目标信息,对水下地形、地貌、地质进行勘察和测绘。
水下通信技术现状及趋势作者:何昫张德张峰吴宇航查文中来源:《中国新通信》 2018年第8期海洋中蕴含着丰富的物质资源,是各国的必争之地,无人潜行器对军民两个应用领域都具有较高的潜在价值。
而水下通信技术是无人航行器工作的必备条件,由于其通信空间受到传输介质的制约,一直是国际上研究的热点问题。
其中包括光通信技术、声光复合通信技术、移动网络通信技术等,新材料的出现也在提升了传输载荷在某些方面的特性,为水下通信开辟了新道路。
一、水下光通信技术水下光通信包括两种方向:有线光通信和无线光通信。
有线光通信是指在海底铺设光缆作为通信载体,海水可防止外界光磁波的干扰,所以,海缆的信噪比较低,由于,光信号的传播速度接近光速,因此,几乎没有延迟,且光缆的寿命较长可达25 年。
无线通信是指海水对蓝绿激光的衰减比对其它波段光的衰减小很多,多采用这种方式,也有提出采用紫外线的通信方式。
光通信的优势包括:光波频率高,承载信息能力强;传输速度快;抗干扰能力强;方向性强等。
二、声光复合通信技术光纤传输是一种以光导纤维为介质进行的数据、信号传输技术,现今已被应用到水下通信领域,复合水声信号的光纤传输系统是利用光电混合缆中光纤、电缆共存的结构,通过光纤向接收设备传输接收的多路声信号,包括压力、磁、温度等辅助传感器数据,再用光纤,把控制水下基阵的指令及控制等指令发送给水下载体。
通过电缆,向水下载体端发射用于水下发射换能器的高压大功率电脉冲信号。
基于Manchester 编码技术,可有效提高对海量数据的双向稳定传输,是一种较可靠的水下声光复合通信方式。
三、移动网络技术水下移动通信网络是由一系列可自由移动的节点组成,摆脱物理环境的制约,可达到任何位置,同时,提高了节点的使用率。
水下传感器网络是通过人工抛撒的方式将其布放于目标海域,每个节点根据预先编制的网络协议,采用自组织的方式形成传感器网络。
按照网络体系结构可划分为:水下二维网络、水下三维立体网络和水下移动网络。
水中兵器发展现状
水中兵器的发展现状可以从以下几个方面进行阐述:
1. 水中无人系统:随着科技的进步,水中无人系统成为水中兵器领域的研发热点。
这些无人系统可以搭载各种传感器和武器,用于水下情报侦察、水雷处理等任务。
其具备自主导航、自动控制和远程操控等功能,大大提高了水中作战的效能和作战人员的安全性。
2. 水下特种作战装备:水下特种作战装备也得到了快速发展。
例如,水下作战封闭式服装的材料和设计不断改进,以提供更好的保暖性和防护性能;水下战斗刀、水下战斗枪等武器装备也逐渐更新升级,以提高打击力和适应水下环境的特殊要求。
3. 水下战备通信系统:在水下作战中,良好的通信系统尤为重要。
因此,水下战备通信系统的研发也成为一个重要的方向。
通过研究声纳技术和水下通信协议,可以实现水下作战单位之间的实时通信和指挥,提高水下作战的协同能力和战场感知能力。
4. 水下战争模拟与训练:为了提高水下作战的战术和战略能力,水下战争模拟与训练成为必不可少的一环。
通过建立水下战场模拟系统和虚拟现实技术,可以让作战人员在真实的水下环境中进行模拟训练,以熟悉水下作战的战术操作和应急处置等技能。
综上所述,水中兵器的发展正朝着智能化、多功能和高效能的
方向发展。
随着科技的不断进步,相信水中兵器的发展会为水下作战提供更多的可能性和优势。
哈尔滨工程大学科技成果——水下信息网络系统项目概述水下信息网络系统提供可靠的通信链路,各个固定或移动节点均可自由的接入网络,快速准确的收发信息,从而构成跨系统,跨任务,跨平台的综合性分布自主式水下综合信息网络体系,增强水下信息透明度。
项目主要具备的能力包括:近程高速率OFDM水声通信(高速率),远程低信噪比稳健扩频水声通信(低速率),基于分布式信息网络的被动隐蔽定位,自由接入且自主修复的动态半自主式网络,释放器的数据传输与遥控释放的功能集成。
本项突破了多项关键技术,研制了多种类的水声通信节点,实现了基于网络的顶层应用功能设计及验证,获得了多项具有自主支持产权的研究成果。
(1)远程水声通信技术研究了水下扩频通信技术,采用多普勒搜索跟踪及RAKE接收机技术解决了浅海、运动条件下的远程、低功耗水下通信的可靠性问题。
通信速率为35bps,最大通信距离超过50公里,误码率低于10-4。
该指标为国内领先水平。
研究了宽带正交多载波扩频调制及改进的RAKE接收机技术,海上试验的通信速率为115bps,误码率10-4。
研制了多节点水下数据无线传输设备,已成功应用于某海军港口堤坝安全监测中。
实现了岸基单元对水下节点的遥测及节点数据回传,传输距离超过6公里。
该成果已达到国内领先水平。
(2)高速水声通信技术为解决水下声通信速率过低的问题,研究了OFDM水声通信系统中的宽带匹配、子载波调制、高速信号处理等技术,在浅水水平信道实现最大通信距离3.5km,最大通信速率50kbps以上,最低误码率10-6。
垂直信道情况下,实现实时视频传输,通信速率为53.2kbps,误码率为10-5。
目前只有美国和日本进行过类似的试验,该指标达到国际先进水平。
(3)全双工水声通信技术创新性的提出了基于矢量传感器的全双工水声通信技术,采用OFDM和扩频两种通信制式和基于矢量传感器的收发分置的设计方案,综合频分、码分和空分等多种技术手段,首次成功研制了3个具有多用户和全双工通信能力的水下通信网络节点。
蛙人运载装备体系发展现状及关键技术
王帅;刘涛
【期刊名称】《中国造船》
【年(卷),期】2012(053)002
【摘要】蛙人运载装备是海军特种部队的新型武器装备,在二次世界大战后受到各国广泛重视.首先对近年来国外蛙人运载装备体系包含的小型蛙人推进装置( DPV)、湿式蛙人输送艇(SDV)、干甲板掩蔽舱(DDS)以及大型干式蛙人运载器(ASDS)的研制现状进行综述,然后详细列举了现阶段蛙人运载装备的关键技术.
【总页数】13页(P198-210)
【作者】王帅;刘涛
【作者单位】中国船舶科学研究中心,无锡214082;中国船舶科学研究中心,无锡214082
【正文语种】中文
【中图分类】U674.941
【相关文献】
1.蛙人探测声呐发展现状及关键技术 [J], 徐瑜;倪小清;夏红梅;杨鹏
2.蛙人装备研究现状及发展展望 [J], 刘宁;李珊;茶文丽
3.蛙人水下作战系统装备发展现状及趋势 [J], 付学志; 石建飞; 江源
4.“水下快车”:蛙人运载装备发展现状及趋势 [J], 刚桂虎;栾益峰;兰济民
5.矿用电动无轨辅助运输装备发展现状及关键技术 [J], 任志勇;石琴
因版权原因,仅展示原文概要,查看原文内容请购买。
水下机器人推进系统动力学分析一、水下机器人推进系统概述水下机器人,也被称为无人水下航行器(UUV),是一种能够在水下自主或遥控操作的设备,广泛应用于海洋探测、科学研究、事侦察以及水下作业等领域。
水下机器人的推进系统是其核心组成部分,直接影响到机器人的机动性、稳定性和效率。
本文将对水下机器人推进系统的动力学进行分析,探讨其设计原理、性能特点以及影响因素。
1.1 水下机器人推进系统的作用与分类水下机器人的推进系统主要负责提供动力,使机器人能够在水下进行前进、后退、上浮和下潜等运动。
根据推进方式的不同,水下机器人的推进系统可以分为螺旋桨推进、喷水推进、机械臂推进等类型。
1.2 水下机器人推进系统的设计要求设计水下机器人推进系统时,需要考虑多个因素,如推进效率、噪音水平、操控性、可靠性以及成本等。
这些因素共同决定了推进系统的性能和适用性。
1.3 水下机器人推进系统的性能指标评价水下机器人推进系统性能的指标包括推力、速度、响应时间、能耗和稳定性等。
这些指标对于机器人在不同水下环境中的作业能力至关重要。
二、水下机器人推进系统的动力学原理水下机器人推进系统的动力学分析是理解其工作原理和优化设计的基础。
动力学分析涉及到流体力学、结构力学和控制理论等多个领域。
2.1 流体动力学基础水下机器人在水下运动时,其推进系统与周围水体相互作用,产生推力和阻力。
流体动力学是研究这种相互作用的科学,涉及到速度场、压力场和边界条件等概念。
2.2 推进系统动力学模型建立水下机器人推进系统的动力学模型,可以描述其运动状态和响应特性。
模型通常包括质量、刚度、阻尼和外力等元素,通过数学方程表达。
2.3 推进系统控制策略为了实现水下机器人的精确控制,需要设计合适的控制策略。
控制策略涉及到推进速度、方向和力度的调节,以适应不同的任务需求和环境条件。
三、水下机器人推进系统的设计优化与应用水下机器人推进系统的设计优化是提高其性能和适应性的关键。

目录:一、引言1.1研究背景1.2目的和意义二、水下机器人技术发展概述2.1水下机器人定义2.2水下机器人技术分类2.3水下机器人技术发展历程三、2024年中国水下机器人现状分析3.1中国水下机器人研发现状3.2中国水下机器人应用领域分析3.3中国水下机器人行业发展状况四、水下机器人市场前景预测4.1水下机器人市场规模预测4.2水下机器人市场发展趋势分析4.3水下机器人市场主要驱动因素分析4.4水下机器人市场竞争格局分析五、结论5.1研究总结5.2研究展望引言:1.1研究背景随着海洋资源开发的需求增加,水下机器人作为一种重要的海洋工具,在海洋探测、海底勘探、海洋科学研究等领域发挥着重要作用。
因此,对于水下机器人的现状和市场前景进行深入的分析和预测具有重要意义。
1.2目的和意义本文旨在分析2024年中国水下机器人的现状,探讨其技术发展和应用领域,并对水下机器人市场前景进行预测。
这对于相关企业、研究机构以及政府部门有着重要的参考价值,可以为他们制定科学合理的发展战略提供依据。
水下机器人技术发展概述:2.1水下机器人定义水下机器人是指能够在水下环境中进行各种任务的机器人系统,它通常包括了船体、控制系统、传感器、执行器等组成部分。
2.2水下机器人技术分类根据不同的功用和应用领域,水下机器人可以分为智能潜水器、自主潜水器、遥控潜水器等几类。
2.3水下机器人技术发展历程从最早的潜水器发展到现代的水下机器人,其技术经历了自主导航、多传感器融合、深海作业等多个阶段。
2024年中国水下机器人现状分析:3.1中国水下机器人研发现状分析中国水下机器人研发情况,包括研发机构和企业的分布情况,研发投入和成果等方面。
3.2中国水下机器人应用领域分析探讨中国水下机器人的应用领域,包括海洋勘探、海洋科学研究、海洋资源开发和海洋环境保护等方面。
3.3中国水下机器人行业发展状况分析中国水下机器人行业的发展状况,包括市场规模、产业链发展、技术创新和政府支持等方面。

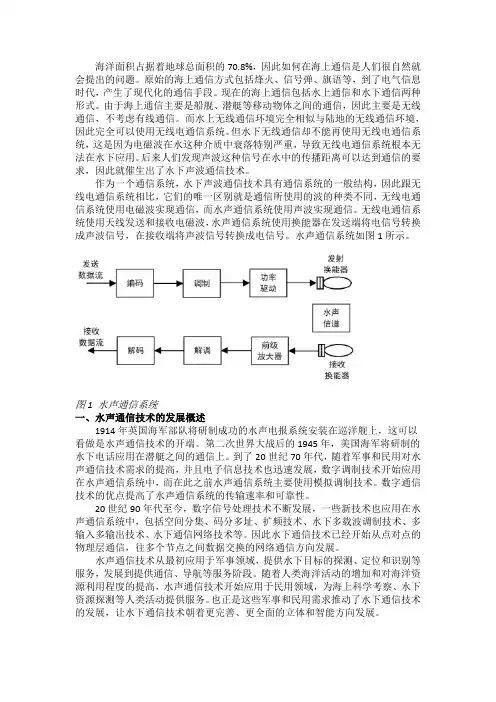
海洋面积占据着地球总面积的70.8%,因此如何在海上通信是人们很自然就会提出的问题。
原始的海上通信方式包括烽火、信号弹、旗语等,到了电气信息时代,产生了现代化的通信手段。
现在的海上通信包括水上通信和水下通信两种形式。
由于海上通信主要是船舰、潜艇等移动物体之间的通信,因此主要是无线通信,不考虑有线通信。
而水上无线通信环境完全相似与陆地的无线通信环境,因此完全可以使用无线电通信系统。
但水下无线通信却不能再使用无线电通信系统,这是因为电磁波在水这种介质中衰落特别严重,导致无线电通信系统根本无法在水下应用。
后来人们发现声波这种信号在水中的传播距离可以达到通信的要求,因此就催生出了水下声波通信技术。
作为一个通信系统,水下声波通信技术具有通信系统的一般结构,因此跟无线电通信系统相比,它们的唯一区别就是通信所使用的波的种类不同,无线电通信系统使用电磁波实现通信,而水声通信系统使用声波实现通信。
无线电通信系统使用天线发送和接收电磁波,水声通信系统使用换能器在发送端将电信号转换成声波信号,在接收端将声波信号转换成电信号。
水声通信系统如图1所示。
图1 水声通信系统一、水声通信技术的发展概述1914年英国海军部队将研制成功的水声电报系统安装在巡洋舰上,这可以看做是水声通信技术的开端。
第二次世界大战后的1945年,美国海军将研制的水下电话应用在潜艇之间的通信上。
到了20世纪70年代,随着军事和民用对水声通信技术需求的提高,并且电子信息技术也迅速发展,数字调制技术开始应用在水声通信系统中,而在此之前水声通信系统主要使用模拟调制技术。
数字通信技术的优点提高了水声通信系统的传输速率和可靠性。
20世纪90年代至今,数字信号处理技术不断发展,一些新技术也应用在水声通信系统中,包括空间分集、码分多址、扩频技术、水下多载波调制技术、多输入多输出技术、水下通信网络技术等。
因此水下通信技术已经开始从点对点的物理层通信,往多个节点之间数据交换的网络通信方向发展。
水下声学通信系统的设计与开发随着信息时代的不断发展和普及,人们对于通信系统的需求也越来越大,而水下通信系统则成为了一个备受关注和研究的领域。
在水下探测、水下勘探、海洋科学研究等领域中,水下声学通信系统已经成为了一种必不可少的技术手段。
本文将从水下声学通信系统的设计和开发两个方面进行探讨,介绍水下声学通信系统的原理、模块构成、通信协议及常见的应用场景。
一、水下声学通信系统的原理水下声学通信系统一般采用声波的方式进行传输,由于水的密度远大于空气,声波在水中的传递速度比在空气中要快很多,因此水下声学通信系统具有高效、稳定的特点。
声波的频率一般在10 Hz到100 kHz之间,可以通过调节声波的频率、振幅、相位等参数来传输数字、语音、图像等信息。
水下声学通信系统的原理图如下图所示:水下声学通信系统由发射机、接收机、调制解调器、传输介质等模块组成,通过调制解调器将传输信息转换为声波信号,再通过传输介质在水中传输,最后由接收机将声波信号转换为原始信息。
二、水下声学通信系统的模块构成水下声学通信系统主要由发射机、接收机、调制解调器和传输介质四个模块组成。
1. 发射机发射机是将电信号转换为声波信号的关键模块,主要由振荡器、放大器、扬声器等组成。
振荡器产生高频电信号,经放大器放大后,通过扬声器转换为声波信号,最终通过传输介质传输到接收机。
2. 接收机接收机是将声波信号转换为电信号的关键模块,主要由水听器、放大器、滤波器、解调器等组成。
水听器接收到声波信号后,将其转换为电信号,并经过放大器和滤波器进行信号增强和滤波处理,最终由解调器将信号还原为原始信息。
3. 调制解调器调制解调器是将数字信号转换为声波信号和将声波信号转换为数字信号的核心模块。
调制解调器主要由编码器、调制器、解调器、译码器等组成。
编码器将传输信息进行编码处理,调制器将数字信号转换为声波信号,解调器将声波信号转换为数字信号,译码器将数字信号还原为原始信息。
第31卷第2期2009年4月指挥控制与仿真
Comm锄dContml&Simulation
V.01.3lNo.2
Apr.2009文章编号:1673.3819(2009)02—0005-04水下作战网络综述蒋志忠1,熊宗接2,马延平’,杨日杰1(1.海军航空工程学院电子工程系,山东烟台26400l;2.92601部队,广东湛江524009;3.海军驻南京地区电子设备军代室,江苏南京2lool3)摘要:首先介绍了国外水下作战网络研究的发展现状,详细阐述了美国水下作战网络的研究成果,并简要介绍了我国在水下作战网络研究方面的现状。在此基础上,提出了水下作战网络的概念和网络模型,分析了水下作战网络的特点、网络体系结构与网络拓扑结构、网络协议,然后指出了构建水下作战网络面临的困难,及我国应着重突破的技术难点,希望为接下来的具体研究提供一定的指导。关键词:水下作战网络;体系结构;网络协议;拓扑结构中图分类号:E835.8文献标识码:A
SummaryofUnderwater0perationNetworkJlANGZhi.zhon91,XIONGZong.iie。。MAYan-pingj,YANGRi-jiel
(1.D印ar虹nentofElec打0nicEn百neeringofNAEI,Y硼tai26400l;2.No.92601TroopsofPLA,Zh锄ji锄g5“009;
3.MilitaIyReprehensive0f秆ceofNavyStationedinNanjingRegion,Nanjing210013,China)Abstract:Withdevelopmentofnet、vorkcentricwaIfhreanditsconstantlyperf.ection,constructionofunde九vater
operationnetworl(isacenaintrendandrequirement.Firstly,thepaperintroducestheconception,Developmentdomesticallya11dabroad,networkmodelandnet、Ⅳorkcharacteristic,networl(architecture,networ|(ingprotocol锄dnetworktopologyofundenvateroperationnetwork.Secondly,itanalyzesmedifbcultiesofconstmctingunde九ⅣateroperationnetworkandpointsoutthedifHculttechniquethatourcountryshouldbreakthrougll,hopingtoprovidesomeguid锄ceforthefolIowingconcreteresearch.
水下网络概述水声通信是一项在水下收发信息的技术。
水下通信有多种方法,但是最常用的是使用水声换能器。
水下通信非常困难,主要是由于通道的多径效应、时变效应、可用频宽窄、信号衰减严重,特别是在长距离传输中。
水下通信相比有线通信来说速率非常低,因为水下通信采用的是声波而非无线电波.常见的水声通信方法是采用扩频通信技术,如CDMA等。
补充:目前水声通信技术发展的已经较为成熟,国外很多机构都已研制出水声通信Modem,通信方式目前主要有:OFDM,扩频以及其它的一些调制方式。
此外,现在水声通信技术已发展到网络化的阶段,将无线电中的网络技术(Ad Hoc)应用到水声通信网络中,可以在海洋里实现全方位、立体化通信(可以与AUV、UUV等无人设备结合使用),但目前只有少数国家试验成功。
工作原理工作原理是首先将文字、语音、图像等信息,通过电发送机转换成电信号,并由编码器将信息数字化处理后,换能器又将电信号转换为声信号。
声信号通过水这一介质,将信息传递到接收换能器,这时声信号又转换为电信号,解码器将数字信息破译后,电接收机才将信息变成声音、文字及图片.[1]水声通讯示意图发展情况这是国际上高水平的技术,在远距离水里能清楚地接收到语音信号,目前世界上也只有极少数军事强国才能做到。
我国厦门大学以许克平教授为首的这个课题组出色地完成了国家交给他们的863项目,已经成功解决了在10公里之内水下信号相互清晰的传递,他们这个系统已达到实用要求。
水声通信机使用的是模拟信号,可是海洋中的波浪、鱼类、舰船等产生噪声,使海洋中的声场极为混乱,声波在海水中传递时产生“多途径干扰信号”这一较大的难题,导致接收到的信号模糊不清.使用水声通讯的蛟龙号半个世纪以来,水声领域的专家对这一难题一直束手无策,老式的模拟水声通信机一直沿用至今。
由于数字通信的产生,陆地上的信号干扰被成功解决,水声领域的专家也开始了在该领域进行探索。
他们认真分析了目前世界上抗多途干扰的几种方法,最后课题组一致认为还是采用电磁波抗干扰的手段—-跳频通信,它既能抗多途径干扰又能保证信息安全。