死区时间控制
- 格式:doc
- 大小:77.00 KB
- 文档页数:6

一种可调死区时间的驱动电路设计摘要:在现代电力电子系统中,电路的稳定性和性能至关重要。
死区时间是指在电子开关转换时的延迟时间,通常用于防止开关引起的交叉导通问题。
然而,传统的死区时间设置固定,不适用于各种不同应用场景。
为解决这一问题,我们提出了一种新颖的可调死区时间的驱动电路设计,可以根据系统要求动态调整死区时间,从而提高电路的可靠性和效率。
本文将详细介绍该电路设计的原理、结构和性能,并通过实验验证其有效性和优越性。
关键词:可调死区时间;驱动电路;电力电子系统;交叉导通;稳定性引言:电力电子系统在工业、交通、能源等领域发挥着越来越重要的作用。
在这些系统中,各种开关电路扮演着关键角色,例如逆变器、换流器、直流-直流转换器等。
这些开关电路的稳定性和性能直接影响到整个电力系统的运行效率和可靠性。
然而,开关电路在切换过程中存在一个重要的问题,即交叉导通。
交叉导通是指在开关从关断状态切换到导通状态时,由于开关元件的特性,导致电流在短时间内同时通过开关的两个导通路径。
这种现象会导致电流波形扭曲、能量损耗增加和电路元件损坏,进而影响整个电力系统的运行。
1可调死区时间的驱动电路设计原理1.1 死区时间调节原理为了实现可调死区时间的控制,我们提出了一种基于电压比较的调节方法。
传统的死区时间控制方法是通过硬件电路固定设置死区时间,而我们的设计则采用了更灵活的方式。
在我们的设计中,死区时间是通过比较两个电压信号的大小来动态调节的。
通过监测这两个电压信号,我们可以判断开关器件的状态,并根据需要调整死区时间的长短。
1.2 电路结构我们的可调死区时间驱动电路采用了比较器、计时器和控制逻辑的组合。
比较器是关键组件,用于不断比较两个电压信号的大小。
计时器则负责生成死区时间延迟,根据比较器的输出来启动和停止计时过程。
控制逻辑将根据比较结果和计时器的状态来产生相应的控制信号,以调控死区时间。
1.3 工作原理在正常工作状态下,比较器不断监测两个电压信号的变化。

STM32高级定时器死区时间设置探究一、死区设置位置:决定死区时间设置的位是‘刹车和死区寄存器TIM1->BDTR’中的DTG[7:0],设置范围是0x00~0xff。
二、死区时间设置公式如下:DT为死区持续时间,TDTS为系统时钟周期时长,Tdtg为系统时钟周期时长乘以倍数后的死区设置时间步进值。
在72M的定时器时钟下TDTS=1/72M=13.89ns.所以以第一个公式,死区时间能以13.89ns的步进从0调整到127*13.89ns=1764ns第二个公式则能(64+0)*2*13.89~(64+63)*2*13.89=1777.9ns~3528.88ns换个角度看,就是(128~254)*13.89同理,第三个公式就是3555.84ns~7000.56ns换个角度看,就是(256~504)*13.89第四个公式就是7111.68ns~14001.12ns换个角度看,就是(512~1008)*13.89综上:死区时间就是不同的公式代表不同范围的死区时间设置,这个范围是互不重叠的。
而但是在不同的死区时间范围内死区时间设置步进是不同的。
若某个系统时钟下的死区时间不够,可以通过改变定时器时钟来改变最大死区时间范围。
当根据硬件电路的特性定下死区时间后,可以根据目标死区时间范围来找到相应的公式,然后代入公式求解出相应的整数(有时候不一定是整数,那就选择最近的那个),拼接DTG[7:5]+DTG[4:0]即可。
例子:这样当我需要3us的死区持续时间时,则可这么计算:3us在第二个公式决定的死区范围之内。
所以选择第二个公式。
3000/(13.89*2)=108,所以DTG[5:0]=108-64=44,所以DTG=127+44=171=0XabTIM1->BDTR|=0xab;反过来验算//72Mhz,死区时间=13.89nsX108*2=3000us经示波器验证,完全正确。
By zxx2013.07.18。

IGBT模块/IPM死区时间设计方法死区时间是PWM输出时,为了使H桥或半H桥的上下IGBT管不会因为开关速度问题发生同时导通而设置的一个保护时段。
通常也指pwm响应时间。
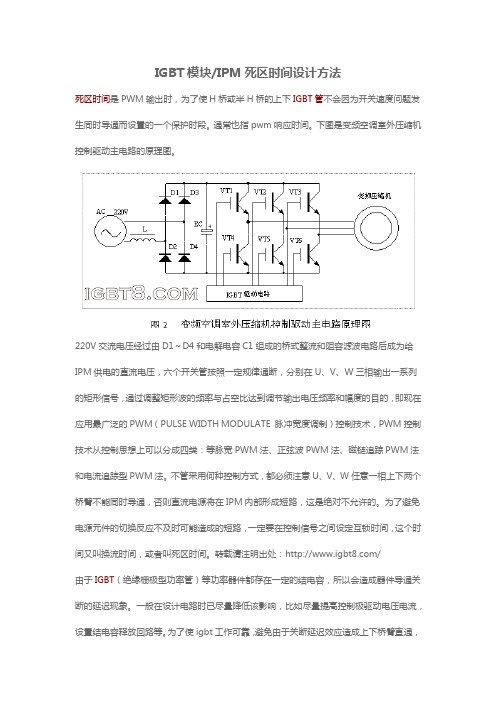
下图是变频空调室外压缩机控制驱动主电路的原理图。
220V交流电压经过由D1~D4和电解电容C1组成的桥式整流和阻容滤波电路后成为给IPM供电的直流电压,六个开关管按照一定规律通断,分别在U、V、W三相输出一系列的矩形信号,通过调整矩形波的频率与占空比达到调节输出电压频率和幅度的目的,即现在应用最广泛的PWM(PULSE WIDTH MODULATE 脉冲宽度调制)控制技术,PWM控制技术从控制思想上可以分成四类:等脉宽PWM法、正弦波PWM法、磁链追踪PWM法和电流追踪型PWM法。
不管采用何种控制方式,都必须注意U、V、W任意一相上下两个桥臂不能同时导通,否则直流电源将在IPM内部形成短路,这是绝对不允许的。
为了避免电源元件的切换反应不及时可能造成的短路,一定要在控制信号之间设定互锁时间,这个时间又叫换流时间,或者叫死区时间。
转载请注明出处:/由于IGBT(绝缘栅极型功率管)等功率器件都存在一定的结电容,所以会造成器件导通关断的延迟现象。
一般在设计电路时已尽量降低该影响,比如尽量提高控制极驱动电压电流,设置结电容释放回路等。
为了使igbt工作可靠,避免由于关断延迟效应造成上下桥臂直通,有必要设置死区时间,也就是上下桥臂同时关断时间。
死区时间可有效地避免延迟效应所造成的一个桥臂未完全关断,而另一桥臂又处于导通状态,避免直通炸模块。
死区时间大,模块工作更加可靠,但会带来输出波形的失真及降低输出效率。
死区时间小,输出波形要好一些,只是会降低可靠性,一般为us级。
一般来说死区时间是不可以改变的,只取决于功率元件制作工艺!死区时间是指控制不到的时间域。
在变频器里一般是指功率器件输出电压、电流的“0”区,在传动控制里一般是指电机正反向转换电压、电流的过零时间。
IGBT(IPM)死区时间的设计方法1 基本原理推导①IGBT及光耦开关时间的定义IGBT开关时间定义光耦开关时间定义②主电路构成③逻辑上的死区时间与IGBT端子(C、E)死区时间的关系下图给出了控制信号、驱动板输出电压和IGBT端子(C、E)间电压的相位关系。
各延迟时间分别定义为:t1:开通控制信号-驱动板开通电压信号输出的延迟时间t2:驱动板开通电压-IGBT开通输出延迟时间t3:关断控制信号-驱动板关断电压信号输出的延迟时间t4:驱动板关断电压-IGBT关断输出延迟时间(这里不考虑上下桥臂的差别)逻辑上设定的死区时间(TD)与IGBT端子(C、E)死区时间(TD’)的关系如下式。
TD'=TD-(t3+t4)+(t1+t2) (1)因此逻辑上的死区时间(TD)随延迟时间t1~t4的大小而变化成实际的死区时间(TD')。
下面分别推导驱动板的延时 (t1、t3)和IGBT延时(t2、t4)。
2 关于死区时间的设计方法对式TD'=TD-(t3+t4)+(t1+t2)进行变换得TD=TD'+(t3+t4)-(t1+t2)= TD'+(t3- t1)+(t4-t2)剩下就是如何界定驱动板的延时 (t1、t3)和IGBT 延时(t2、t4)。
设计方法就是分为这两部分进行设计的,分别IGBT 部分的死区时间和HIC 部分的死区时间。
(1)IGBT 部分的死区时间①IGBT 开关时间的误差数据的收集及最大误差数据的算出根据各个公司的IGBT 数据,算出IGBT 开关时间的误差数据(Tj =25℃)。
根据σ及X ±4σ计算各IGBT 的X ±4σ.(误差最大)以下给出富士IGBT 的σ值供参考. ○600V 系列 σ=0.041(最大) ○1200V 系列 σ=0.063(最大)②结温为25℃和125℃时的开关时间比率计算根据数据手册中的结温在25℃和125℃、电流为额定电流时的开关时间(ton,toff),计算温升比率(T125/T25)。
igbt死区时间
IGBT死区时间是IGBT的关键参数之一,也是IGBT能否高效运
行的基础。
它是IGBT负载变化时,在从关断到开启期间,模拟部分无法快速响应所测得的间歇时间。
IGBT死区时间是评价模拟电路中滞后
电路以及控制部分对响应幅度和响应速度的重要技术指标。
当IGBT死区时间变长时,间接导致了系统延迟高,反应慢和稳定性差,有可能
影响IGBT的节电效果,也可能使电路失去稳定性,因此要求IGBT死
区时间尽可能的短,以实现IGBT的更好性能体现。
因此,IGBT死区时间的缩短对IGBT的节电效果和电路稳定性
大有裨益。
IGBT微电子元器件的特殊特性,决定了它的操作转换期间
会有一段死区时间。
而IGBT死区时间的缩短,则需要依赖IGBT结构
本身的优化,比如提高IGBT模之间的稳定性,优化IGBT的表面结构,调节IGBT的功率损失参数,并且加强抗热装置的结构设计,以降低IGBT死区时间和发射温度,从而带来了更好的运行性能。
另外IGBT的死区延迟的还可以通过改变IGBT驱动电路的设计,提高电流源和电容设计,提升给定IGBT的过电压等方法来减少。
总之,IGBT死区时间的缩短,将会促使IGBT得到更好的节电效果和更好的
操作性能,因此有必要进行相应的技术研究,以期获得这方面的有效
技术支持,从而带来更好的IGBT运行状态。
Value Engineering• 123 •基于单片机死区时间控制方法研究Research on Dead Time Control Method Based on Single Chip Microcomputer代勇D A I Y o n g(北方工业大学电子信息工程学院,北京100144)(School of Electronic and Information Engineering, North China University of Technology, Beijing 100144, China )摘要:单片机在嵌入式中应用十分广泛。
随着时代的发展,单片机的功能越来越强大。
本篇文章是基于stm32系列单片机来产生 的死区时间,占空比以及频率可调制的互补输出PW M波。
脉冲宽度调制(PW M)是一种模拟的控制方式。
利用单片机微处理器的数字 输出对模拟电路进行控制的技术。
本文利用STM32的高级定时器TIM E1进行可调制的PW M波互补输出。
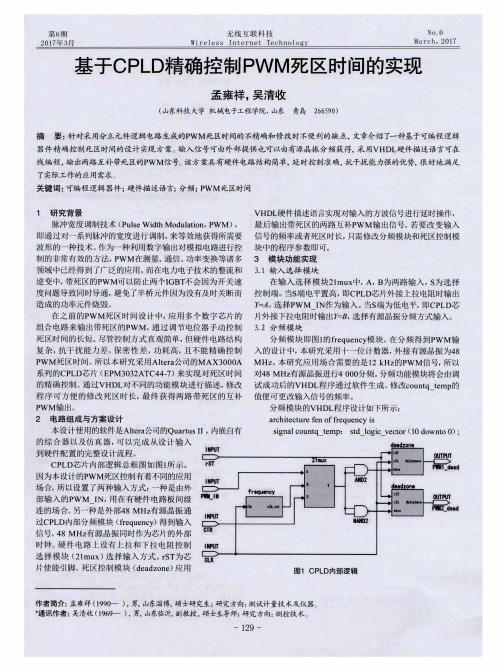
Abstract:SCM is widely used in embedded applications. With the development of the times, the function of SCM is more and more powerful. This article is based on the stm32 series of single -chip to generate the dead time, duty cycle and frequency adjustable complementary^ output PWM wave. Pulse width modulation (PWM) is a simulated control method. The single-chip microcomputer digital output is used to control the analog circuit. This article uses the STM32 advanced timer TIME1 to make the modulation PWM wave complementary output.关键词:嵌入式;互补输出;死区时间控制;占空比;脉冲宽度调制Key words:embedded; complementary output; dead time control;中图分类号:TN787 文献标识码:A0引言目前利用单片机进行产生各种数字信号已不再稀奇,毕竟目前嵌入式和最小系统甚是流行且发展极快用途也 很广,在日常生活中经常看到,变频器和电机等末端都是 由大功率管,G B T等元件组成的H桥或三相桥。
Cube MX 是一个用来生成初始化代码的图形化配置工具,用于STM32 微控制器。
PWM(脉宽调制)技术则是一种通过改变信号的占空比来控制电机或灯光等设备的技术。
而死区时间单位则是在PWM 控制中非常重要的一个参数。
在这篇文章中,我将深入探讨Cube MX 中 PWM 死区时间单位的作用和使用。
让我们来了解一下 Cube MX 中 PWM 的概念。
PWM 技术是通过控制信号的占空比来控制电机或其他设备的工作方式的一种技术。
在Cube MX 中,我们可以通过简单的拖拽和配置来生成 PWM 的初始化代码,从而实现对 STM32 微控制器中 PWM 输出信号的控制。
然而,要想实现对设备精确的控制,就需要考虑到死区时间单位的设置。
那么,什么是死区时间单位呢?死区时间单位是用来防止功率半桥或全桥的 MOSFET、IGBT 等功率器件因为导通时间过长导致短路或损坏的时间保护参数。
在 PWM 控制中,设置合适的死区时间单位可以有效地避免开关器件之间出现短路,提高系统的可靠性和稳定性。
在 Cube MX 中,我们可以通过配置死区时间单位来实现对 PWM 输出的精确控制。
在配置 PWM 时,我们可以指定死区时间的大小,通常以微秒为单位。
通过设置适当的死区时间单位,可以确保在 PWM输出信号切换时不会出现因为开关延迟而导致的短路情况,从而保护电路和设备的安全。
除了保护设备安全外,合理设置死区时间单位还可以提高系统的效率和稳定性。
通过合理设置死区时间单位,可以避免因为开关器件导通延迟而造成的能量损耗和效率下降。
通过设置合适的死区时间单位,可以避免因为开关器件导通时间不一致而引起的输出信号波形失真和系统调节不稳定等问题。
Cube MX 中的 PWM 死区时间单位是一个非常重要的参数,它不仅可以保护设备的安全,提高系统的效率和稳定性,还可以实现对设备的精确控制。
在实际应用中,需要根据具体的设备和系统要求来合理设置死区时间单位,以实现最佳的控制效果。
自控系统死区时间的处理方法2007-12-06 09:53:57对于一个反馈控制器而言,如何处理生产过程调节中的死区时间是个棘手的问题,此处我们将讨论几种处理方案。
对于一个反馈控制系统,死区时间可以定义为从“测量传感器检测到变量开始改变的瞬时”到“控制器对生产过程开始施加正确有效干预的瞬时”之间的延迟时间。
在死区时间内,生产过程的实际值根本不会对控制器的调节作用起任何反应。
在系统反应的死区时间结束之前,任何试图操纵或改变过程实际值的努力都注定是徒劳的。
举个例子,我们不妨想象一下“驾驶一辆方向盘很松的小汽车的过程”。
小车司机如想拐弯,他一定要使劲打方向盘才能克服方向盘太松而带来的滞差,并真正施加作用在操纵杆上。
只有在此之后,小车司机才能感觉到汽车方向的改变。
所有完成这一系列动作的时间就是死区时间。
死区时间问题是有据可查的最难克服的控制类问题之一。
在上面的例子中,如果一个司机对汽车拐弯过程中的死区时间大小估计不对的话,可能会因为上次的拐弯动作效果不佳,而在本次的拐弯过程中动作过于剧烈。
图1:如果光学测厚仪安装得离轧辊太远,那么控制器要花较长的时间才能够纠正钢板的厚度偏差。
这时还可能由于调节过于“冒进”而使情况变得更糟。
然而,如果司机发现“在原来估算的死区时间结束之前汽车就已经开始拐弯”之后再采取缓解措施就为时已晚了,因为此前的操作动作早已矫枉过正,而且本应早些结束的。
在此之后,司机又不得不试图再拐回原有方向,这样可能最终引发拐弯过程的失控。
顺便提及一下,类似的原因也是如此众多的酒后驾驶事故的罪魁祸首。
也许汽车的方向盘拐弯是灵敏的,但是一个醉酒的司机由于感官不灵,等到他觉察到汽车开始拐弯时汽车就已经拐向过头了。
在这种情况下,拐弯过程的失控是由人的感官迟钝导致,而非设备调节过程的死区时间,然而这种情况导致的结果却是灾难性的。
传感器的安装位置,控制器的偏差容错度在上述两种情况中,显而易见,消除死区时间是解决该控制难题的最佳途径。
汽车的方向盘应该加紧,司机任何时候都应该保持清醒状态。
然而,死区时间有时无法被完全消除。
我们不妨以热轧钢机为例,它有一对相向的轧辊,用于将热钢材轧成规格一致的薄钢板(见图1)。
在轧辊的下游位置有一测厚仪,用来测量刚轧好的薄钢板厚度,控制器再依据此反馈信号来增减轧辊作用于钢材上的压力,并以此方法来保证钢板厚度不会超出规格范围。
按照理想状况,测厚仪的安装位置应该尽量靠近轧辊,因为这样可将“轧辊的压力变化”与“由此引起的厚度变化”之间的死区时间置于最小。
否则,如安装位置太远,控制器就可能无法及时识别偏差,而如果我们将此识别过程设置得足够快,就可避免钢板的厚度不均问题。
更糟的是如果死区时间的影响较为可观,还会导致控制器的调节作用过于剧烈。
正如那位驾驶具有反应滞后方向盘的汽车司机一样,控制器也会以为其先前的调节作用没有效果而将控制作用加得更强。
事实上,在钢板的厚度变化最终体现出来之前,由于控制器的累计效应,使得其输出值与初始值之间的偏差早已大大的超调了,因此又会导致相反方向上的偏差。
此种调节过程,会使得轧辊施加在钢材上的压力持续的上下波动,大量钢板会由此产生侧向皱褶,并最终导致报废。
最为无奈的是,由于测厚仪无法在紧挨着轧辊接触钢材的位置进行安装,因此刚刚轧好的钢板必须要向下游移动一段距离后,才能够测量到厚度,这样的话,调节过程存在一些死区时间也就在所难免了。
这种我们称之为“传输延时”的现象,影响到很多“牵涉到物料需要从执行器到传感器之间传输”的生产流程,如流经管线的流体,吹过风管的空调风,顺着传输带移动的物体等等。
在以上任何一种情况下,如果将传感器的安装位置尽可能的靠近执行器,就可以最大限度的减少死区时间。
然而,死区时间的完全消除是难以做到的。
PID参数的整定要处理自控系统中无法避免的死区时间问题,另外一种方案就是赋予控制器一定限度的“耐性”,或称之为“偏差容错度”。
实施这一方案最为简单有效的办法就是:减弱控制器的整定参数,并以此来减缓系统的响应速度。
图2:Smith 预估器使用了一个过程对象的模型(包括增益,时间常数以及死区时间)来预估在“没有其它干扰及死区时间”情况下的过程实际值。
对于一个PID (比例-积分-微分)回路,控制器整定参数的减弱往往意味着限制控制器的积分作用。
毕竟积分器的作用是“只要设定值和过程实际值之间存在偏差,就要持续不断的、以一定的比率来增加或减少控制器的输出值”。
然而对于存在死区时间的场合,由于控制器需要经过较长时间才能开始以正确的调节作用来纠正偏差,因此偏差往往很长时间都会存在,以致积分器一直都在进行积分作用,最终导致系统超调。
解决方法就是让积分器适时停止积分作用,以避免超时积分引发的系统超调。
John G. Ziegler和Nathaniel B. Nichols在他们1942年发表的关于PID回路整定的著名论文中曾经指出:减弱PID控制器的调节作用的最佳方法是以1/d2 的计算因子来减少积分整定常数, 此处d等于调节过程的死区时间。
他们同时指出:比例整定常数应该以1/d 的计算因子来减少。
对于微分整定常数这一项,他们并未推荐能够减弱控制器调节作用的方法。
PID参数因子的警示本文中提到的比例、积分、微分整定常数,实际上就是在PID控制规则中以理论方式表现出的P、I以及D参数:此处CO(t)是以时间t为自变量的控制器输出,而e(t)是过程变量实际值与设定值之间的偏差。
Ziegler 和Nichols所用到的PID控制规则以及事实上所有的现代PID控制器,它们都会采取不同整定常数的不同形式。
“以1/d2 或1/d为因子来减弱PID控制器的整定参数”并非适用于本文示例之外的所有PID控制器。
对于每个可用于替换的PID算式,也能使用其它的因子来减弱整定参数,并且能够取得同样的效果,但是,这些因子均依赖于不同的算式,而且它们之间互不兼容。
如果我们想对一个PID控制器进行参数整定或是减弱其整定参数,都需要对那些特殊控制器所使用的算法形式非常明确。
尽管Ziegler-Nichols整定法最初是由试验推导而来,但也能够使用数学方式来表达:即如何通过限制积分作用来减少控制系统中由于死区时间而导致的负面影响。
例如,对于一个二阶环节的调节过程,其系统增益为K,死区时间为d,阻尼系数为z,系统固有频率为wn ,那么可用如下整定的PID控制器来精确抑制偏差:此处e≈2.72,也就是自然对数的基数值。
使用这些整定参数,可以构成一个快速消除偏差的闭环回路,并且该回路不会陷入由死区时间而导致的“系统徘徊在超调与欠调之间”的恶性循环。
可以注意到,这些解析式的参数整定法建议:对于所有三个PID参数都应该以1/d 的计算因子来减弱控制器的整定参数。
事实上,以1/d2 的计算因子来减少积分整定常数,确实稍稍有些过度。
Smith 预估器对于一个持续发散振荡的控制回路而言,固然可以通过减弱控制器的整定参数来使系统恢复稳定,但如果我们可以使得控制器首先识别死区时间,并且赋予它足够的“耐性”以等待死区时间结束,那就不必再运用上述减弱整定参数的方法了。
该论点正是于1957年由Otto Smith提出的著名的Smith预估器控制方案的基本理念。
Smith 预估器的方案可参见图2死区时间的补偿。
此方案包括一个普通的反馈回路和一个内部回路,而这一内部回路直接将两项额外的作用值施加在反馈通道上。
第一项是假设在不存在任何干扰的情况下,对生产过程的预估值——这是基于某个已经有意忽略了负荷扰动影响的过程模型,并通过控制器的输出计算而产生的数值。
如果该模型能够正确的反映过程对象特性,那么计算值就可代表无扰动工况下的过程实际值。
图3:重新配置图2(死区时间的补偿)中的模块,表明了Smith预估器是如何克服死区时间的,其方法如下:使控制器的调节作用不再依据于测量到的过程实际值、而是依据于“由Smith预估器计算出的包含各类扰动但不包含死区时间”的预估值,并以此作为系统反馈变量。
“死区时间”在实际过程中仍然存在,但由于在“用来预估测量值”的数学模型中已将其剔除于闭环回路之外,因此它已不再影响控制器的正确动作。
最后的结果是:经过该预估法改进后的系统反馈值,能够对控制器的作用效果立即有所反应。
用于产生无干扰状况下过程实际值的数学模型,包括两个相互串联的环节。
第一个环节代表系统中将死区时间分离后的所有过程对象特性。
而第二个环节则仅仅代表死区时间。
已将死区时间特性分离后的第一环节,可以用一个普通的微分或差分方程来表达,而该方程包含了所有对于过程对象的增益与时间常数的估算值。
数学模型的第二环节是一个简单的时间滞后单元。
然而,对于一个仅具有时间滞后特性的数学模型,信号输入后,它的其它特性(除死区时间外)是不会改变的。
重新配置的Smith 预估器Smith预估方案施加在反馈通道上的第二项作用值是:假设在既不存在干扰,也不存在死区时间的情况下,对生产过程值的预估值——即基于过程对象数学模型的第一个环节(系统增益和时间常数)、而不是基于第二个环节(死区时间),并通过控制器的输出计算而产生的数值。
该值将预估出在没有干扰的情况下,死区时间一旦结束后的过程预估值(因此我们称之为Smith预估器)。
关于过程对象阶数的深层理解有关“z, wn, 二阶过程对象”方面总体性的更为详尽的解释,可以参见“了解控制过程的阶次”,CONTROL ENGINEERING China,从实际测量的过程值中,减去由Smith预估器计算得出的,在无扰情况下的过程值,就可估算出系统干扰的大小。
Smith预估器把这一干扰值(即上述减法产生的差值)与预估的过程值相加,就可计算出包含系统干扰,但不包含死区时间的改进后的过程反馈值。
结论在图3重新配置的Smith 预估器中已经对此类数学处理方法的目的给出了最好的解释。
该图表示了一个与图2(死区时间的补偿)相同的Smith预估器,只是将其中的功能模块进行了重新配置。
该图说明对于一个过程变量(该变量既包含系统干扰,又包含死区时间),如何将估算出的系统干扰重新又加回到不含干扰的过程变量中,并以此产生一个过程变量的估算值。
此举的目的在于:将反馈控制系统中的死区时间剔除于闭环回路之外。
Smith 预估器使得控制器不再依靠测量到的过程变量,而是依靠改进后的过程变量反馈值(该预估值仅包含系统扰动,而不包含死区时间)来进行调节作用。
如果以上方法运用得当,并且所运用的过程数学模型确实与实际生产过程相匹配,那么在系统设定值改变或生产负荷对生产过程形成干扰时,控制器就可推导出相对于系统某个设定值的实际过程值。
无奈的是,以上条件仅仅是假设。
对于控制器而言,在没有死区时间的情况下来满足以上控制目标当然不难,难的是如何得到实现以上控制方案所需的过程数学模型。