GPS运动目标提取及轨迹呈现
- 格式:doc
- 大小:93.00 KB
- 文档页数:9
GPS位移监测的原理GPS位移监测是指利用全球定位系统(GPS)技术对目标进行实时定位并计算位移,进而监测目标在时间和空间上的变化。
该技术应用广泛,可以在各个领域实现位置追踪、车辆定位、监测变形、地震预警等任务。
其原理主要包括接收信号、定位计算和位置更新三个步骤。
1.接收信号GPS系统由一组卫星和接收器组成。
卫星发射精确的时间信号,接收器接收到来自至少4颗卫星的信号,并记录下每颗卫星的时间信号和相对接收时间。
接收器接收到的信号是微弱的,需要通过天线放大增强信号,然后进行解算和处理。
2.定位计算定位计算是GPS位移监测的核心环节。
接收器获取到的卫星信号包含卫星的位置信息和时间标记,接下来需要利用数学算法计算接收器的位置。
该算法主要基于三角测量原理,通过测量接收器和卫星之间的距离来计算接收器的位置。
在计算之前,需要首先进行伪距观测值的计算。
伪距观测值是指接收器接收到的卫星信号传播的时间差换算成的距离差。
接收器通过测量卫星信号的到达时间与卫星信号的发射时间之间的差值,可以计算出接收器与每颗卫星之间的距离。
这个距离差称为伪距,是基于接收器记录的时间信号和卫星信号的传输速度计算得到的。
当接收器接收到至少4颗卫星的信号后,就可以开始计算位置了。
计算的方法有两种:一种是传统的三角割线法,另一种是更加精确的差分定位法。
不同的方法会根据具体情况选择适合的算法。
3.位置更新位置更新是指在计算出接收器的位置后,不断获取新的卫星信号并进行重新计算、更新位置。
GPS系统中,卫星的数量和位置是不断变化的,因此接收器需要不断进行位置更新,以保持实时的位置信息。
位置更新的频率可以根据需求进行调整,一般可以达到每秒钟多次的更新频率。
总结起来,GPS位移监测的原理是通过接收到至少4颗卫星的信号,并利用三角测量原理计算出接收器的位置,然后根据获取到的新卫星信号进行位置更新。
通过不断的定位计算和位置更新,可以实现对目标的位移监测。
智能交通系统中的车辆检测方法使用教程智能交通系统是现代城市交通管理的重要组成部分,其中车辆检测是实现智能交通系统的关键技术之一。
车辆检测主要用于实时获取道路上车辆的数量、速度、大小以及车辆的运行状态等信息,从而为交通管理和优化提供数据支持。
本文将介绍智能交通系统中常用的车辆检测方法,供读者参考和使用。
一、传感器检测法传感器检测法是一种常见的车辆检测方法,通过布置传感器在道路或停车场等区域,利用感应技术实时检测车辆的到来和离开。
常见的传感器包括磁力传感器、红外线传感器和超声波传感器等。
其中,磁力传感器广泛应用于交通信号控制系统中,主要用于检测车辆的存在与否以及车辆的行驶方向;红外线传感器可以实时检测车辆通过传感器时的反射信号,进而判断车辆的数量和速度;超声波传感器具有高灵敏度和广泛探测范围的特点,可用于车辆的停车检测等。
二、视频图像处理法视频图像处理法是一种基于计算机视觉的车辆检测方法,其原理是通过对道路交通场景进行视频监控,利用计算机对监控图像进行处理和分析,从而提取出车辆的相关信息。
常用的视频图像处理方法包括背景建模、运动目标检测和车辆特征提取等。
背景建模是通过对连续监控图像的学习和分析,准确建立道路背景模型,并在此基础上进行车辆的移动目标检测;运动目标检测主要通过提取图像中目标的运动轨迹,进而判断目标是否为车辆;车辆特征提取是基于图像处理技术,通过提取车辆图像中的颜色、纹理和形状等特征,从而实现车辆的识别和分类。
三、微波雷达检测法微波雷达检测法是一种利用微波信号检测车辆的方法。
基于物体对微波信号的反射特性,微波雷达可以实时获取车辆的位置、速度和运动方向等信息。
与传统的红外线和超声波传感器相比,微波雷达具有更远的探测距离、更高的分辨率和更强的抗干扰能力。
因此,微波雷达在智能交通系统中被广泛应用于车辆检测和交通流量监测等方面。
同时,微波雷达还可以通过波束形成技术实现对特定区域的目标检测和跟踪,从而提高车辆检测的精度和可靠性。
实验二(1) 手持GPS的基本操作一、实验目的1、了解GPS的操作原理2、掌握手持GPS界面设置3、掌握手持GPS的初始化设置二、GPS系统的组成GPS由三个独立的部分组成:1、空间星座部分:21颗工作卫星,3颗备用卫星。
2、地面监控部分:1个主控站,3个注入站,5个监测站。
3、用户设备部分:即GPS接收机,接收GPS卫星发射信号,以获得必要的导航和定位信息,经数据处理,完成导航和定位工作。
GPS接收机硬件一般由主机、天线和电源组成。
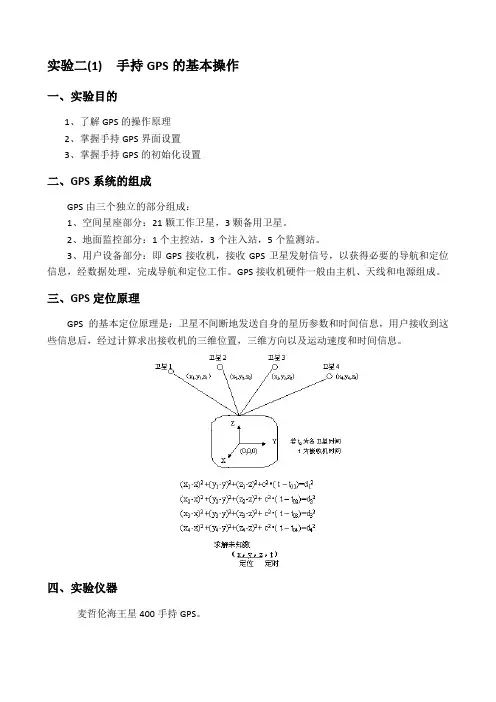
三、GPS定位原理GPS的基本定位原理是:卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置,三维方向以及运动速度和时间信息。
四、实验仪器麦哲伦海王星400手持GPS。
五、实验步骤:(一)认识手持GPS的基本界面:1、按钮操作A 背光按钮B 电源按钮C 缩小按钮D 放大按钮E 回车按钮/ 光标控制器F “PAGE / GO TO”按钮G 退出按钮H 菜单按钮I SD卡插槽(在保护橡胶盖下面)2、导航界面导航菜单有6个选项:航点、地标、航迹、藏宝点、航线和旅行。
航点选项提供了一种创建一条导航航线到一个已保存到麦哲伦海王星GPS手持机航点的方法。
地标选项是被用来选择在内部基础地图上的或详图上的目的地航点。
航迹选项显示您预先保存的航迹点。
您可以从列表中选择一条航迹。
(航迹就是已保存的轨迹。
)藏宝点选项允许您选择一个已保存的藏宝点,然后用它作为导航航线的目的地航点。
航线选项显示您已预先创建的航线,可以选择激活它。
旅行选项将来更新可用。
点击麦哲伦网站获取信息更新。
麦哲伦海王星GPS手持机有8个导航屏幕和1个卫星状态屏幕,导航屏幕提供有助于您旅行的信息。
选择导航屏幕1.在查看任一导航屏幕,按“PAGE / GO TO”(下一个屏幕)或“ESC”(上一个屏幕),选择您想要的导航屏幕。
打开或关闭导航屏幕1.在查看地图屏幕,按“MENU”键。
GPS定位原理和简单公式GPS是全球定位系统的缩写,是一种通过卫星系统来测量和确定地球上的物体位置的技术。
它利用一组卫星围绕地球轨道运行,通过接收来自卫星的信号来确定接收器(GPS设备)的位置、速度和时间等信息。
GPS定位原理基于三角测量原理和时间测量原理。
1.三角测量原理:GPS定位主要是通过测量接收器与卫星之间的距离来确定接收器的位置。
GPS接收器接收到至少4颗卫星的信号,通过测量信号的传播时间得知信号的传播距离,进而利用三角测量原理计算出接收器的位置。
2.时间测量原理:GPS系统中的每颗卫星都具有一个高精度的原子钟,接收器通过接收卫星信号中的时间信息,利用接收时间和发送时间之间的差值,计算出信号传播的时间,从而进一步计算出接收器与卫星之间的距离。
简单的GPS定位公式:1.距离计算公式:GPS接收器与卫星之间的距离可以通过测量信号传播时间得到。
假设接收器与卫星之间的距离为r,光速为c,传播时间为t,则有r=c×t。
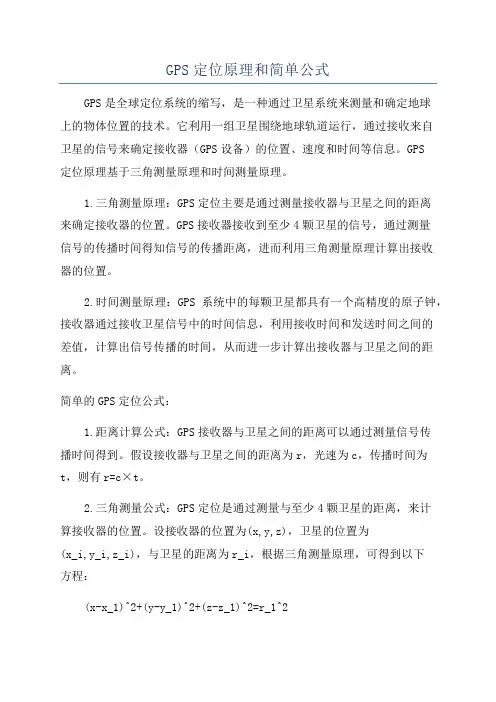
2.三角测量公式:GPS定位是通过测量与至少4颗卫星的距离,来计算接收器的位置。
设接收器的位置为(x,y,z),卫星的位置为(x_i,y_i,z_i),与卫星的距离为r_i,根据三角测量原理,可得到以下方程:(x-x_1)^2+(y-y_1)^2+(z-z_1)^2=r_1^2(x-x_2)^2+(y-y_2)^2+(z-z_2)^2=r_2^2...(x-x_n)^2+(y-y_n)^2+(z-z_n)^2=r_n^2这是一个非线性方程组,可以通过迭代方法求解,求得接收器的位置。
3.定位算法:GPS定位一般使用最小二乘法来进行计算。
最小二乘法是一种数学优化方法,用于最小化误差的平方和。
在GPS定位中,通过最小化测量距离与计算距离之间的差值的平方和,来确定接收器的位置。
总结:GPS定位原理基于三角测量和时间测量原理,通过测量接收器与卫星之间的距离,利用三角测量公式和最小二乘法来计算接收器的位置。
gps的功能GPS(全称为全球定位系统)是一种依靠卫星定位技术来确定地理位置的导航系统。
它是通过一系列卫星和地面设备相互配合,提供全球范围内的精确定位和导航服务。
GPS具有以下功能:1.定位功能:GPS最主要的功能是提供精确的地理位置信息。
通过接收卫星发射的信号,GPS设备可以确定自己的经度、纬度和海拔高度,并通过地图显示出当前所在位置。
2.导航功能:GPS可以为用户提供准确的导航指引。
用户可以输入起点和终点,GPS系统会根据地图数据和实时交通信息,计算出最佳的行驶路径,并提供语音导航提示,使用户可以轻松找到目的地。
3.跟踪功能:GPS设备可以通过卫星信号跟踪物体的移动轨迹。
这在运输物流、车辆管理和儿童安全等方面有着重要的应用。
例如,快递公司可以实时追踪包裹的位置,车辆管理部门可以监控车辆的行驶情况。
4.定位服务:GPS可以为用户提供周边服务的定位功能。
通过接入互联网,GPS系统可以定位用户所在位置附近的餐厅、酒店、银行、加油站等服务场所,方便用户快速找到需要的服务。
5.应急救援功能:GPS在应急救援中扮演着重要角色。
比如,在山区迷路、海上遇险或发生地震等灾害时,通过GPS可以准确定位被困人员的位置,提供给救援部门,以便快速进行救援。
6.地图更新与信息分享:GPS系统可以随时更新地图数据,将新建道路、修路工程等信息反映在地图上,提高导航的精确性。
同时,用户还可以将自己的位置信息分享给其他用户,方便互助导航。
7.时间同步功能:GPS使用卫星来提供高精度的时间同步服务。
因为卫星的运行速度和高度非常稳定,所以GPS提供的时间非常精确,可用于科学实验、金融交易等对时间要求较高的领域。
总体来说,GPS具有定位、导航、跟踪、定位服务、应急救援、地图更新与信息分享、时间同步等多种功能,为人们的出行、安全和生活提供了很大的便利。
未来随着技术的发展,GPS的功能还将继续扩展和创新,为人们带来更多的服务和便利。
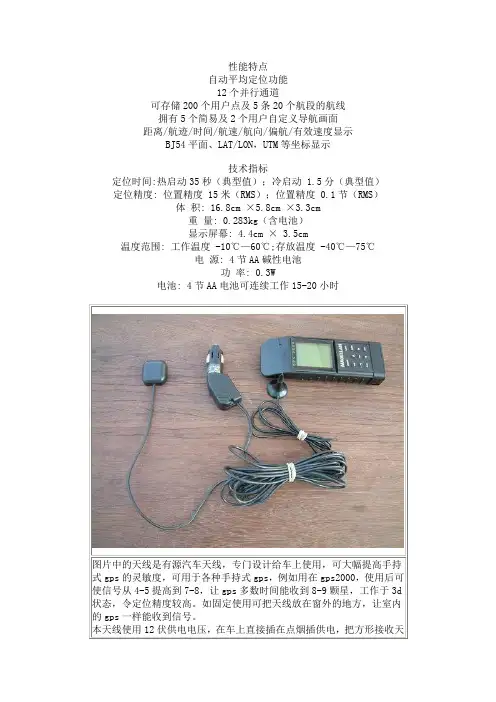
性能特点自动平均定位功能12个并行通道可存储200个用户点及5条20个航段的航线拥有5个简易及2个用户自定义导航画面距离/航迹/时间/航速/航向/偏航/有效速度显示BJ54平面、LAT/LON,UTM等坐标显示技术指标定位时间:热启动35秒(典型值);冷启动 1.5分(典型值)定位精度: 位置精度 15米(RMS);位置精度 0.1节(RMS)体积: 16.8cm ×5.8cm ×3.3cm重量: 0.283kg(含电池)显示屏幕: 4.4cm × 3.5cm温度范围: 工作温度 -10℃—60℃;存放温度 -40℃—75℃电源: 4节AA碱性电池功率: 0.3W电池: 4节AA电池可连续工作15-20小时GPS2000中文使用说明书固定点: GPS2000接收卫星信号计算出一个坐标值来描述你在地球上唯一的位置,这叫做获得的一个固定点。
计算出的坐标就是这个固定点。
固定点可以在”POSITION”屏幕看到。
地标:(简写为LMK)固定点可以命名后保存,实际应用中可能有很多情况下也称作路点。
去:你可以按”GOTO”键选择一个目的地地标,GPS2000将从现在的位置引导你到目的地并可以获得方位和距离信息。
路线:路线和“去”有些不同,路线包含起始和结束的地标,并可能包含这条路上的其他地标。
路线可以从一个地标到另外一个,也可以多达甚至29个地标。
路段:路段是路线里面从两个地标之间的距离,比如按顺序从A到B然后再到C 再到D包含三段路段。
海拔:GPS2000可以计算出你的海拔高度。
HDG: GPS2000用来定义接收机在地球表面移动的方向。
BRG: 方位用北方为0度,顺时针方向计算,方位指示你要向哪个方向可以到达目标。
GPS2000使用4个5号碱性电池最多可以连续使用17个小时。
安装电池的时候可以感觉到阻力,你能够发现电池盖上有一个密封圈。
初始化为了持续的计算出你的位置,GPS2000必须至少能够跟踪24颗环绕地球的GPS 卫星之中的3颗卫星信号。
如何使用GPS进行地理定位GPS(Global Positioning System)是一种用于地理定位的技术,广泛应用于导航、航海、军事、航空等领域。
它通过接收来自卫星的信号,计算出接收器的位置信息,从而实现地理目标的定位。
本文将介绍如何使用GPS进行地理定位并探讨其在现代生活中的应用。
一、GPS的工作原理GPS系统由一组卫星、地面控制站和用户接收器组成。
卫星不断向地面发送信号,接收器接收到至少4颗卫星的信号后,通过计算信号传播时间和卫星位置,可以确定接收器的位置坐标。
二、使用GPS进行地理定位1. 车辆导航车载GPS是现代车辆导航系统的关键组成部分。
它能够提供实时的行车路线规划和转向指示,帮助驾驶员准确导航,避免迷路。
2. 户外定位对于喜欢户外活动的人来说,GPS是必备工具之一。
通过携带手持GPS设备,可以在野外实时定位,确保安全,并帮助规划行进路线。
3. 航海导航GPS在航海中起着重要的作用。
船只配备GPS接收器后,可以通过卫星信号准确地定位自身位置,辅助船舶导航,提高航行安全性。
4. 钓鱼辅助钓鱼爱好者可以使用GPS标记渔场,记录钓点坐标,并通过导航功能准确找到钓点,提高钓鱼的成功率。
5. 运动监测通过佩戴腕式GPS设备,可以实时监测运动轨迹、计算运动距离和速度,并记录运动数据,帮助运动爱好者进行科学训练。
三、GPS技术的发展和应用前景GPS技术在过去几十年间发展迅猛,成为现代人们生活中极为重要的一部分。
随着技术的进一步成熟,GPS在以下领域有更多的应用前景:1. 交通管理GPS可以与交通信号灯、高速公路收费系统等结合,实现智能交通管理,提高交通效率和安全。
2. 物流配送通过合理利用GPS技术,可以实现物流配送的智能化管理,准确跟踪货物位置,提高配送效率和管理水平。
3. 农业精细化管理农业领域的GPS应用,可以帮助农民制定种植和施肥计划,提高农产品产量和质量。
4. 紧急救援GPS可以对事故或灾难中的受困者实时定位,提高救援效率和抢救成功率。
车联网中的车辆位置定位与轨迹分析技术研究随着信息技术的快速发展,车联网以其强大的功能和无限的潜力成为了汽车行业的热门话题。
车联网的核心是通过无线通信技术实现车辆之间、车辆与基础设施之间的无缝连接和信息交互。
在车联网系统中,车辆位置定位和轨迹分析是至关重要的技术。
本文将就车联网中的车辆位置定位和轨迹分析技术进行研究。
一、车辆位置定位技术车辆位置定位技术是车联网系统中的关键技术之一,它可以精确地确定车辆在地球表面的位置。
现有的车辆位置定位技术主要包括全球卫星定位系统(GPS)、LTE定位、惯性导航系统(INS)和车载无线局域网(VANET)等。
1. 全球卫星定位系统(GPS):GPS是目前最为主流和常用的车辆定位技术之一。
通过接收来自卫星的定位信号,GPS可以准确地确定车辆的经纬度坐标。
然而,GPS在高楼、密集城区和山区等特殊环境下信号容易受到干扰,造成定位精度下降。
2. LTE定位:LTE定位是利用4G网络中的测量值和信令进行车辆定位的技术。
相对于GPS,LTE定位可以在室内和复杂环境中提供更好的定位精度。
此外,随着5G网络的普及,车辆定位精度还将进一步提升。
3. 惯性导航系统(INS):INS利用车辆上的加速度计和陀螺仪等传感器获取车辆的加速度和角速度数据,并结合车辆初始状态信息和地图数据,通过非线性滤波算法进行位置估计。
INS可以提供连续的定位信息,但在长期使用过程中会存在误差累积的问题。
4. 车载无线局域网(VANET):VANET利用车辆之间的通信进行位置信息交换和共享,通过多个车辆的联合定位来获取准确的车辆位置。
VANET有很高的实时性和可靠性,但在车辆密集区域和通信质量较差的地区可能存在局限性。
二、车辆轨迹分析技术车辆轨迹分析技术是基于车辆位置定位技术的基础上,对车辆行驶轨迹进行挖掘和分析,以提供更多有益的信息和服务。
车辆轨迹分析技术主要包括轨迹数据采集、轨迹预处理、轨迹特征提取和轨迹数据挖掘等。
GPS车辆定位系统技术方案简介一、概述.............................................................................................................................. - 3 -二、系统分析.............................................................................................................................. - 4 -1.需求分析........................................................................................................................... - 4 -2.项目建设的目标内容....................................................................................................... - 4 -三、系统技术方案...................................................................................................................... - 6 -1.设计原则........................................................................................................................... - 6 -2.系统组成........................................................................................................................... - 7 -3.系统功能........................................................................................................................... - 7 -4.系统特点......................................................................................................................... - 11 -5.系统指标......................................................................................................................... - 12 -5.1 技术指标.....................................................................................错误!未定义书签。
运动健康-活动记录单次锻炼和荣耀手环3一样,作为一款将“健康和运动”作为主打功能之一的智能穿戴设备,华为运动手环的体验也令人惊喜。
日常佩戴情况下,可以自动统计丰富全面的日常活动数据,为你提供详尽的数据参考;同时,针对跑步和游泳等,设计了特定的运动模式,在手环上提供运动实时数据,运动完成后APP上可保存详细的记录。
跑步训练计划,可以帮助你根据现有不同的能力,逐步提升自己的跑步水平,持续看到自己的进步。
下面,一起看看这些具体功能的使用体验吧!Part1:日常活动记录日常佩戴过程中,手环会自动检测你的步数、距离、卡路里、心率、睡眠、中高强度活动时间、站立统计等情况。
市面上多数手环都包含步数统计功能,仅有步数就足够了么?对身体健康有益的活动量统计,实际上是中高强度活动时间。
世界卫生组织建议,成年人每周应从事一定时长的中高强度活动。
华为运动手环在日常活动统计中,结合心率以及运动传感器检测到的运动情况,更进一步,自动进行中高强度活动时间的统计。
从华为运动手环上的步数界面,长按按键进入,在第3页图标下方显示的数据,即为当天的中高强度活动时间(分钟数)。
久坐是一个容易被忽视的健康隐性杀手。
据相关研究表明:长期久坐,可能导致静脉充血、淤血程度加重,增加心脏病发作风险和发病死亡率;影响脑部供血供氧,加重乏力、记忆力减退症状、增大老年性痴呆症患病风险;热量消耗减少,堆积脂肪,引发多种慢性疾病。
华为运动手环,为你提供站立统计和久坐提醒功能(需要在穿戴APP上开启久坐提醒开关),帮你远离久坐危害。
华为运动手环的站立统计功能,会在早上7:00—晚上7:00的12小时内。
检测你在每个小时里是否符合站立条件,如果符合,站立小时数在该小时时段内统计值+1。
当你满1小时没有活动时,手环也会提醒你起来活动一下。
Part2:跑步如果你是一个跑步爱好者,华为运动手环会为你提供安全有效便捷科学的跑步体验,跑步过程中查看实时心率,让你的跑步更有效更安全。
GPS全称为全球定位系统,是一种利用人造卫星进行定位的导航系统。
它的基本原理是通过计算卫星和接收器之间的距离来确定接收器的位置,实现位置的精确定位和导航功能。
GPS定位的基本过程包括信号发射、信号传播、接收器接收和信号处理,下面将逐一介绍。
一、信号发射1.1 GPS系统由一组绕地球轨道运行的卫星组成,这些卫星每天都在精确预定的轨道上运行,向地球发送无线电信号。
1.2 GPS信号是由多个卫星同时发射的,通常至少需要4颗卫星进行定位计算。
这些卫星分布在地球表面上空的不同位置,以确保在任何时间、任何地点都可以接收到至少4颗卫星的信号。
二、信号传播2.1 GPS卫星发射的信号是以电磁波的形式传播,经由大气层以及其他影响媒介,传播至地面接收器。
信号在传播过程中会受到大气层、地形、建筑物等因素的干扰,因此接收器需要对信号进行处理,去除干扰影响。
2.2 由于地球与卫星之间的距离很远,信号的传播速度极快,因此在信号传播过程中,需要考虑信号的传播时间,以及卫星和接收器之间的相对速度。
三、接收器接收3.1 GPS接收器是指能够接收并处理卫星信号的设备,它通常由天线、接收模块、处理器和显示器等部分组成。
3.2 接收器通过天线接收卫星发射的信号,然后将信号传输至接收模块进行处理。
在处理过程中,接收模块需要对信号进行放大、滤波、解调等操作,以便后续的定位计算。
3.3 接收器会同时接收到来自多颗卫星的信号,通过对这些信号的处理,可以确定每颗卫星和接收器之间的距离。
四、信号处理4.1 信号处理是指接收器通过对接收到的卫星信号进行计算和分析,得出接收器的准确位置和导航信息的过程。
4.2 通过对多颗卫星信号的处理,接收器可以计算出卫星和接收器之间的距离,并通过三角测量的原理确定接收器的位置。
4.3 除了位置信息,接收器还可以根据卫星信号的时间信息,计算出接收器相对于卫星的速度,并推导出导航信息。
接收器也会进行误差修正,提高定位的精度和准确性。
跟踪技术的原理和应用论文一、引言跟踪技术是指利用各种设备和方法,准确地记录和追踪目标的位置、运动轨迹和其他相关信息的技术。
它在许多领域中都有广泛的应用,如交通管理、物流配送、安全监控等。
本文将介绍跟踪技术的原理和应用。
二、跟踪技术的基本原理跟踪技术的基本原理是通过收集目标的位置数据,并根据这些数据推算目标的运动轨迹。
以下列举了几种常见的跟踪技术及其原理:1.GPS定位系统–利用卫星定位系统,通过接收多颗卫星的信号确定目标的位置。
–GPS系统通过测量卫星信号的传播时间和卫星的位置信息,计算目标的具体位置。
2.RFID技术–使用无线射频识别技术,通过在目标上植入射频标签,读写器可以无线识别并获取目标的位置信息。
–RFID技术可以实现对目标的实时跟踪,适用于物流配送和库存管理等领域。
3.视频跟踪技术–利用计算机视觉技术,从视频中提取目标的特征点,并根据这些特征点进行目标跟踪。
–视频跟踪技术可以实现对目标的实时监控和追踪,广泛应用于安防领域。
三、跟踪技术的应用领域跟踪技术在各个领域中都有重要的应用价值,下面列举了几个常见的应用领域:1.交通管理–路况监测和智能交通系统可以利用跟踪技术实时追踪车辆的位置和行驶轨迹,从而实现交通流畅和路况预测。
2.物流配送–利用跟踪技术可以实时监控货物的位置和运输状态,提高物流的效率和可靠性。
–同时,可以通过跟踪技术优化配送路线和资源调度,降低成本和提升服务质量。
3.安全监控–跟踪技术在安防领域中有广泛的应用,可以实时监控人员和物品的位置,并及时发现异常情况。
–通过结合其他技术,如人脸识别和行为分析,跟踪技术可以提供更全面的安全保护。
4.环境监测–利用跟踪技术可以实时监测环境中的污染物的分布和扩散情况,为环境保护提供重要的数据支持。
四、跟踪技术的发展趋势随着科技的不断进步和应用领域的不断拓展,跟踪技术也在不断发展。
以下是跟踪技术的一些发展趋势:1.多传感器融合–随着传感器技术的进步,未来的跟踪系统将采用多传感器融合的方式,综合利用不同类型的传感器数据,提高跟踪的准确性和可靠性。
基于GM(1,1)预测算法的民航飞机实时轨迹可视算法钱睿;乐俊;刘丹【摘要】针对民航飞机动态飞行可视化中滞后和跳跃问题,研究并提出了一种基于预测的民航飞机实时轨迹可视化算法.算法包括轨迹点预测,目标点行进和误差修正三部分.轨迹点预测基于GM(1,1)算法进行改进,在每次迭代时依据所有先验点和搜索方向动态调整发展系数.目标点行进基于预测坐标点提出TSUS(Time Slice Uniform Speed)算法,TSUS算法保证了在既定时间内目标确实移动到目的地,且能够根据初始速度方向调整轨迹弧度.误差修正采用分段式误差修正策略,以平衡不同情况下精确性和实用性.实验表明,提出的算法模型可用于民航飞机可视轨迹渲染中,且能获得良好的效果,提高系统的可用性和用户体验.%Aiming at the lagging and jumping problems in dynamic flight visualization of civil aircrafts, a real-time trajectory visualization algorithm for civil aircrafts based on prediction is studied and put forward. The algorithm includes three parts: track point prediction, target traveling and error correction. The track point prediction is improved based on GM(1, 1) algorithm. In each iteration, the development coefficients is dynamically adjusted according to all priori points and the search direction. The target traveling is based on the TSUS (Time Slice Uniform Speed) algorithm, which ensures that the target does indeed move to the destination within a period of time and adjusts the trajectory according to the initial direction. The error correction adopts the segmented error correction strategy to balance the accuracy and practicality of different situations. Experiments show that the algorithm canbe effectively applied to visual trajectory rendering of civil aircrafts and improve the usability and user experience of the system.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)011【总页数】6页(P187-192)【关键词】可视化;GPS;运动预测;航空定位;轨迹追踪【作者】钱睿;乐俊;刘丹【作者单位】电子科技大学电子科学技术研究院,成都 611731;西南电子信息技术研究所,成都 610041;电子科技大学电子科学技术研究院,成都 611731【正文语种】中文航空运输业的发展使现代人的生活更加便利,而民航飞机作为航空运输的载体,在其中扮演者重要的角色.民航飞机传递位置信息,使相关人员了解飞机位置是保证航空安全的重要手段.为了更直观的表达位置信息,可视化界面应需而生.民航飞机传输定位信号主要依靠ADS-B(Automatic Dependent Surveillance-Broadcast,广播式自动相关监视)报文,其中包括了经度、纬度、高度、速度、航向、识别号等信息[1].通过自动周期性发送ADSB报文,监测站即可获取飞机相关信息.ADS-B报文中的飞机位置信息和运动信息是通过解析GPS、北斗等定位系统获取的[2].定位可视化技术应用在许多领域,由于web端先天的兼容性,使得其也成为定位数据可视化的重要载体[3].目前常见的方式有两种.第一种方式是通过接收到的目标位置信息,将目标在可视界面上对应点的位置进行更新,以达到显示目标位置的目的.此种方式能够准确反映目标位置信息,但存在两点不足.第一,目标轨迹不连续,观察者无法感受到目标移动过程,在下一定位信号获取之前,用户无法获知目标情况.第二,定位信号存在滞后性,在收到信号后才进行位置更新,如果目标持续移动,则可视界面中的位置会滞后于实际位置.目前,此种方式常用于现有的民航飞机定位可视化设备上.第二种方式是在第一种方式上的改进,它在收到位置信息后,将可视化界面的目标点移动到新的位置,提高了一定的用户体验,用户能够看到目标点的移动.但仍然没有解决根本问题,并且出现了不符合现实情况的轨迹,例如跨越了障碍,轨迹不平滑等问题[4].此种方式目前多用于地面移动目标定位的可视化系统中[5].目前,飞行相关数据可视化的研究大都是飞机本身的姿态方面[6].本文针对民航飞机轨迹可视化的需求,基于移动预测的方式,研究在二维场景下利用周期ADS-B报文进行飞机行进动画的渲染算法,提出了基于预测的民航飞机实时轨迹可视算法,使得可视化界面中飞机目标点移动更加精确和平滑,用户体验得到了提升.为实现民航飞机轨迹可视化,需要周期性获取飞机ADS-B报文.ADS-B报文中包括经度、纬度、高度、时间、南北方向速度,东西方向速度,垂直速度等信息.本文仅讨论二维空间中的可视化问题,且获取信号周期T固定,所以仅需要经度、纬度、东西方向速度、南北方向速度4个参数.三维空间的可视化问题可类比.飞机轨迹可视化的渲染可分为三个步骤进行,依次是:轨迹点预测、目标点行进和误差处理.1)轨迹点预测主要是用来先行预测下一坐标点,使得在未收到下一坐标点实际信号之前,飞机的可视化点可以先行移动,保证了可视化的连贯性.2)目标点行进则是当预测出下一坐标点时,飞机可视化点向前行进的策略,既要保证在时间间隔内移动到目标点,又要保证轨迹平滑达到良好的可视效果.3)因为预测是无法做到非常精确的,与实际坐标之间必然会存在误差,误差修正就是对此的一种修正,是提高精确度的关键步骤.而关于GPS信号传输和计算中产生的误差修正不在本文的讨论范围内,相关方法请参考文献[7].本文认为获得的GPS定位坐标即是可视化中需要展示的位置信息.本文提出的民航飞机轨迹可视化算法流程如图1.针对可视化需求而研究的飞行轨迹预测算法并不多见.但仍有一些轨迹预测算法被提出,如基于高斯混合模型的轨迹预测算法[8]等;也有采用已有滤波算法应用于空中飞行轨迹预测研究分析[9].这些算法普遍计算复杂度高,性能开销大,无法满足可视化系统的要求.本节针对此问题,基于 GM(1,1)预测算法[8]提出了一种预测模型.预测轨迹点采用基于灰色预测模型加以优化的预测模型.给定数据序列对给定的数据序列进行一次累加,序列为且满足微分方程:根据灰色系统生成理论,可将微分方程转换为其中,运用最小二乘法求出上式解,即可得到GM(1,1)灰色预测模型方程:其中,a为发展系数.根据灰色预测模型,可以求得的拟合值,然后进一步可以利用还原公式求得的拟合值: 即求得了原始序列的拟合值.在求解过程中,发展系数a与精度密切相关,工程中常常根据先验经验取一个固定值,通常情况下取值范围为时可用于中长期预测;时可用于短期预测.但全部预测过程采用统一发展系数,会使得在不同阶段预测准确度不同且偏差较大.本文针对实际场景动态设置a值,以提高预测精准度.b为背景中挖掘出的信息数据,通常是一个定值,由具体场景提供.GM(1,1)模型精度检验通常采用残差,后验差,关联度三种方式,本文将采用相对残差进行检验,并根据每次的检验结果调整发展系数a的取值.灰色模型中当k=1时模型必成立,且时,则模型方程组为超定方程组,采用最小二乘法求解系数a.而a的最佳化问题则转换为残差或残差百分比的最小化问题,即为下的有约束条件的非线性规划问题.约束条件采用航路信息的先验知识进行约束.航路是指由国家统一划定的具有一定宽度的空中通道.民航航班通常在航路内行驶,所以采用航道边缘为边界条件.在航路行进方向上给定边界值,使得最终预测点在边界范围内.由此需要确定搜索方向,在给定搜索方向上的预测值满足取值最优条件即可.记进行第k+1轮迭代时,其中tk是位移步长,与速度和时间有关.为搜索方向,得: 求得的极小值点和在航路边界处的边界值点,即可得到对应的与瞬时速度方向夹角为的方向.剩余的最小的值即为.由此我们得到了搜索方向Pk,带入Pk可以得到方程:解方程可得发展系数a.再由灰色预测模型方程,得到第k个点的一次累加预测值使用还原公式得到第k个点的预测值为保证行进过程及时且平滑,本文提出了TSUS算法,即时间片匀速行进算法.包括分量匀速率和速度匀转动方向两部分.行进是指从当前点运动到下一预测点的过程,其关键在于速度控制.本文速度采用垂向分量匀速,速度方向采用匀角速度向内偏转法,可以确保在时间间隔点目标平滑运动到下一点的位置.记第k点坐标为第k+1点的预测坐标为,记位移向 lk,有:则 pk到的直线距离为位移方向向量为目标在k点的瞬时速度为瞬时速度方向向量求出k点瞬时速度与位移向量的夹角满足:取适当单位时间t0,将定位信号的时钟周期T按t0分段,得到n段时间片,即:同时,将也做n等分,得到每个时间片内的位移距离和角度偏转量行进控制,使目标点按时间片依次行进,在每个时间片内的速度在位移方向上的分量为每个时间片内的速度向量与位移向量的夹角与前一个时间片相比变化为当位移方向角大于k点瞬时速度方向角时取+,否则取-.最终得到,目标在时间片ti内的运动状态方程:由于预测误差在预测模型中不可避免,所以对预测误差的修正策略也直接影响到可视化中信息准确度和平滑度.本文对误差修正的策略建立在可视化的实际应用场景上,即在以可视化界面中能够反映出定位和移动情况即可.依据以上条件,本文提出分段式误差处理策略.设目标点当前位置为收到的GPS信号坐标为第k-1点坐标为则时间周期内的实际位移距离dk为:1)若则认为在可视化中显示位置没有明显变化.此时目标图标不移动,但需要使用实际位置信息进行下一次预测.2)若则认为预测点与实际位置之间存在需要修正的误差.为保证轨迹平滑,将目标点位移到实际位置的过程纳入下一次行进过程的第一段时间片.由于误差较小,所以采用直线行进的方式,对观看者而言平滑度不会受到太大影响.3)若时,则认为误差太大,属于预测失误情况.此类情况一般在行进轨迹波动剧烈时会发生.此时准确性的需求大于动画的视觉平滑性,行进退化为直接跳转方式,即目标点直接跳转至实际位置.对速度方向的误差修正则容易许多,因为瞬时速度方向不会影响视觉平滑性,所以采用直接舍弃原始速度信息,采用GPS信号瞬时速度.根据中国民航局相关规定及《航空承运人例行航空器追踪监控实施指南》中的要求,自2016年12月1日起,我国民航全面实现客机全球追踪监控.所有我国民航客机在每15分钟或更短时间周期内,须通过现有机载设备自动向地面运行控制部门发送飞机所在经度、纬度、高度和位置信息,以确保地面实时掌握飞行中客机的准确位置.根据以上规定,中国航空公司航班均需在一段时间内自动向地面站提交位置及相关信息,这为自动获取数据绘制可视化界面提供了基础.从性能角度考虑,由于空管场景数据量非常大,同时在运行中的航班非常多,如果采样时间较短,将对服务器性能产生较大压力.但国内航班由于航程较短,采用上限的15分钟采集时长又不利于界面绘制.民航统计信息表明平均每天飞行航班架次约为10500架次,峰值时间空中同时约有3000余架飞机.所以本文采用5分钟时间周期,即队列数据处理时间平均 0.1s左右,符合实际应用.同时,结合实际数据样例进行试验.坐标采用某次航班平飞阶段中120分钟内的定位点数据,采集时间间隔为5分钟.航班坐标数据如表1所示.飞机的航向是指从所取基准线北端沿顺时针方向与飞机纵轴在水平面上的投影间的夹角.基准线取地球子午线得到的夹角称为真航向.本文描述飞机飞行速度方向采用真航向.真航向角度可以由经纬度坐标差值求得.即:使用以上数据进行实验验证.在第1点预测时由于没有足够的先验点,故采用直线行进.从第2点开始,预测结果如图2,和图3所示.针对预测结果,计算预测准确度.本文采用后验方差比进行检验.具体步骤和计算方法如下:1)依据前文提到残差和相对残差的计算公式,分别计算残差和相对残差.2)分别计算实际经纬度的均值和方差以及残差的均值和方差SE,有:3)计算后验方差比C:计算结果如表2所示.由实验结果和上述误差计算结果可知,本文提出的预测模型总体上能够较为准确的预测飞机坐标点位置,满足可视化对定位点预测的要求.但若坐标位置变化波动较大则会产生较大的误差.从结果上看,经度变化比较平稳,预测较为精确,而纬度在波动比较大的点明显存在误差,而误差较大的点会采用直接跳转策略消除误差,但会影响视觉平滑度.基于上述预测值,绘制目标点行进轨迹.依据本文提出的行进算法,取定位信号获取时间间隔,单位时间,绘制的移动轨迹如图4所示.由轨迹图看出,本文提出的可视化行进算法基本保证了视觉上的连续性,提升了用户体验.但由于采样间隔较长,导致在前后坐标点波动过大的位置预测失误,为修正较大误差产生了跳转轨迹尖角.但从可视化角度来看,在定位点处的坐标位置仍然较为精确,可以认为界面上的信息显示准确,而轨迹也比直接连接处的折线图更为形象.由此可以得出结论,本文提出的行进算法在可视化轨迹的绘制上具有实用性.本文基于民航飞机的航行特点,结合实际需求和条件,提出了一种基于民航飞机通信中定位数据的轨迹可视化渲染算法.该方法特点在于能够通过已有信息和航路等限定条件预测飞机走向,在传统GM(1,1)模型上依据预定条件提出了发展参数的非线性规划最优性解法.继而在轨迹构建上提出了简单且有效的行进算法.最终通过误差修正保证了正确性.这一算法模型经过实际数据的测试验证,证明了其能良好的作用于民航飞机轨迹的渲染,为提供民航可视化系统打下基础.目前本文提出的模型已经应用于民航飞行实时数据可视化系统的设计中,该系统基于地理效果图[10]展示飞机飞行轨迹及相关信息.系统验证,本文提出模型在飞机位置预测及可视化方面具有较好的效果.【相关文献】1 张鹏,刘意,段照斌.基于 BDS/GPS 的 ADS-B 信号源的研究.测控技术,2015,34(1):12–15,19.2 雷静.GPS/北斗定位解算算法的研究[硕士学位论文].哈尔滨:哈尔滨工程大学,2013.3 肖寒冰,方路平.一种 webGIS 数据可视化方法.计算机系统应用,2010,19(12):81–85.[doi:10.3969/j.issn.1003-3254.2010.12.016]4 石波,卢秀山,陈允芳.应用 EKF 平滑算法提高 GPS/INS 定位定姿精度.测绘科学技术学报,2012,29(5):334–338.5 计宏炜,沈亚强.一种可视化的定位系统设计.微型机与应用,2014,33(14):82–84,87.[doi:10.3969/j.issn.1674-7720.2014.14.026]6 李春香.飞行数据可视化技术研究.中国安全科学学报,2009,19(1):166–171.7 乔少杰,金琨,韩楠,等.一种基于高斯混合模型的轨迹预测算法.软件学报,2015,26(5):1048–1063.[doi:10.13328/ki.jos.004796]8 徐肖豪,杨国庆,刘建国.空管中飞行轨迹预测算法的比较研究.中国民航学院学报,2001,19(6):1–6.9 孔令云,沈鹃.灰色预测模型 (GM(1,1))预测精度浅析.公路交通科技,2008,25(9):346–349.10 赵庆展,张清,宁川.基于 OpenGL 的 DEM 地形可视化和虚拟漫游系统.计算机系统应用,2006,15(5):66–69.。
目录 目录 .................................................................................................................................................. 1 前言 .................................................................................................................................................. 2 1 定位信息的接收和提取 ............................................................................................................... 2 1.1 初始化串口 ........................................................................................................................ 2 1.2 定位信息的接收 ................................................................................................................ 3 1.3 定位信息的提取 ................................................................................................................ 3 2 坐标变换....................................................................................................................................... 5 3.参数转换........................................................................................................................................ 6 3.1七参数与三参数的概论 ..................................................................................................... 6 3.2七参数与三参数的理论性试验 ......................................................................................... 7 一、 大地高对坐标转换的影响 ............................................................................... 7 二、 七参数与三参数对坐标转换的影晌 ............................................................... 7 三、大地高转换为正常高 ............................................................................................... 7 4.求取转换参数的一些方法 ............................................................................................................ 8 5.小结 ............................................................................................................................................... 8 参考文献........................................................................................................................................... 9 前言 全球定位系统(GPS)是近年来开发的最具有开创意义的高新技术之一,其全球性、全能性和全天候性的导航定位、定时和测速优势必然会在诸多领域中得到越来越广泛的应用。在实际应用中,GPS 接收机输出的定位信息是通过RS232 串口传递给计算机,计算机主程序需要将GPS定位信息进行判别并提取所需要的有用数据(如目标当前的经纬度坐标、海拔、速度和时间等)。由于GPS 使用的坐标系WGS-84 与我国采用的坐标系不同,因此还需要将经纬度坐标进行坐标变换使其适应当地坐标系,再将当前目标显示在电子地图上。本文就针对当前比较普及的GPS,对其卫星定位信息的接收及其定位参数提取的实现和坐标转换的方法予以介绍。
1 定位信息的接收和提取
GPS 接收机主要由GPS 接收天线、变频器、信号通道、微处理器、存储器以及电源等部分组成。GPS接收机只要处于工作状态就会按照指令把接收并计算出的GPS 导航定位信息(NEMA0183 语句)通过串口传送到计算机中。计算机从串口读取数据有多种方法,Windows 中提供了一个串口通讯控件(MSComm),MSComm 控件可以采用轮询或事件驱动的方法从端口获取数据。比较常用的事件驱动方法:有事件(如接收到数据)时通知程序。在程序中需要捕获并处理这些通讯事件。这样可以很简单地利用串口进行通讯。在使用它之前,应将控件加在应用程序的对话框上。然后再用ClassWizard 生成相应的对象。
1.1 初始化串口 该控件有很多自己的属性,可以通过它的属性窗口来设置,也可以用程序设置。建议采用程序设置,这样更灵活。 if(m_ComPort.GetPortOpen())//设置串口配置信息前,先要关闭串口; m_ComPort.SetPortOpen(FALSE); m_ComPort.SetCommPort(1); //指定使用的串口为com1; m_ComPort.SetInBufferSize(1024);//设置输入缓冲区的大小; m_ComPort.SetOutBufferSize(512);//设置输出缓冲区的大小; m_ComPort.SetInputMode(1); //设置输入方式为二进制方式; m_ComPort.SetSettings("9600,n,8,1");//设置波特率等参数; m_ComPort.SetRThreshold(1);//设置为每接收一个字符就触发一个OnComm 事件; m_ComPort.SetInputLen(0); //设置为0时,程序将读取缓冲区的全部字符; if(!m_ComPort.GetPortOpen()) //打开串口; m_ComPort.SetPortOpen(TRUE); 1.2 定位信息的接收 在设置通讯口后,采取效率比较高的事件触发方式完成对GPS 定位信息的接收。在使用事件驱动法设计程序时,每当有新字符到达,或端口状态改变,或发生错误时,MSComm 控件将触发On-Comm 事件, 而应用程序在捕获该事件后, 通过检查MSComm 控件的CommEvent 属性可以获知所发生的事件或错误,从而采取相应的操作。这种方法的优点是程序响应及时,可靠性高。代码如下: void CCommDlg:: OnCommCom1() { // TODO: Add your control notification handlercode here VARIANT m_input1; COleSafeArray m_input2; LONG Length,i; BYTE data1[1024]; if(m_ComPort.GetCommEvent()==2) //comEvReceiv 事件,有数据到达 { m_input1= m_ComPort.GetInput(); //读缓冲区 m_input2=m_input1; Length=m_input2.GetOneDimSize(); //接收缓冲区的字符数目 for(i=0;im_input2.GetElement(&i,data1+i); AddToData1(data1,Length);//自定义函数,将接收的字符存入缓存 } }
1.3 定位信息的提取 前面的代码只负责从串口接收数据并将其放置于缓存,这些信息必须通过程序分解处理,才能提取出有用的定位信息数据。对GPS 进行信息提取必须首先了解信息的数据格式,GPS 接收机使用的是NMEA-0183 的传输协议,NMEA-0183 的信息格式一般如下所示:$aaaaa,df1,df2,....[CR][LF] 所有的信息由$开始,以换行结束,紧跟着$后的5个字符解释了信息的基本类型,多重的信息之间用逗号隔开。不需要了解NMEA — 0183 通讯协议的全部信息,仅需要从中挑选出所需要的那部分定位数据,最常见的几种类型为:GPGGA(GPS 定位数据)、GPGLL(地址位置和经纬度)、GPZDA(日期和时间)、GPVTG (方位角对地速度)、GPRMC(GPS 推荐的最短数据,有经纬度、日期和时间、天线移动速度)等。对于通常的情况,定位数据如经纬度、速度、时间等均可以从“$GPRMC”帧中获取得到,该帧的结构及各字段释义如下: $GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>*hh <1> 当前格林尼治时间(UTC),格式为 hhmmss < 2 > 状态字, A :定位成功;V:目前没有定位 < 3 > 纬度格式为ddmm.mmmm < 4 > 纬度的属性,南半球为 N,北半球为S