自适应第三章模型参考自适应控制
- 格式:ppt
- 大小:1.26 MB
- 文档页数:39

自适应控制的方法自适应控制是一种用于调节系统行为以适应外部变化的控制方法。
它能够根据系统当前状态和外部环境的变化自动调整控制参数,以保持系统性能在可接受的范围内。
在工业控制、汽车控制、航空航天等领域都有广泛的应用。
自适应控制的基本原理是根据反馈信号对系统进行实时调整,以便让系统可以适应外部环境的变化。
它是一种闭环控制方法,即通过不断地观测系统的输出,并与期望的输出进行比较,然后对控制参数进行调整,以确保系统达到期望的性能。
相比于传统的固定参数控制方法,自适应控制可以更好地适应系统和环境的变化,使得系统更加稳定和可靠。
自适应控制的方法有很多种类,其中最常见的包括模型参考自适应控制、自抗扰控制、模糊自适应控制和神经网络自适应控制等。
这些方法各有特点,但基本原理基本相同,即通过观测系统的输出和环境的变化,对控制参数进行动态调整,以保持系统的稳定性和性能。
模型参考自适应控制是一种基于系统模型的控制方法,它通过对系统模型的估计,来实时调整控制参数。
它可以适应系统的非线性和时变特性,对于一些复杂的控制系统来说是比较有效的。
自抗扰控制是一种抑制外部扰动对系统影响的控制方法,它通过观测和预测扰动,来进行实时调整控制参数,以抵消外部扰动对系统的影响。
模糊自适应控制是一种基于模糊逻辑的控制方法,它通过对系统的模糊化处理,来实现对控制参数的自适应调整。
它可以适应系统的复杂性和不确定性,对于一些复杂的非线性系统来说是比较有效的。
神经网络自适应控制是一种基于神经网络的控制方法,它通过对系统的学习和记忆,来进行实时调整控制参数,使系统可以适应外部环境的变化。
它可以适应系统的非线性和时变特性,对于一些复杂的控制系统来说是比较有效的。
自适应控制方法的选择,取决于系统的特性和需要达到的性能,不同的方法都有其适用的范围和条件。
在现实应用中,还可以根据系统的具体情况,结合多种方法来实现自适应控制,以获得更好的效果。
在实际应用中,自适应控制可以提高系统的鲁棒性和稳定性,对于一些复杂、非线性、时变的系统来说,尤其有着重要的意义。


现代控制理论中的模型预测控制和自适应控制在现代控制理论中,模型预测控制和自适应控制是两种广泛应用的控制方法。
这两种控制方法各有优劣,适用于不同的控制场景。
本文将分别介绍模型预测控制和自适应控制的基本原理、应用范围和实现方法。
模型预测控制模型预测控制(MPC)是一种基于数学模型预测未来状态的控制方法。
MPC通过建立系统的数学模型,预测系统未来的状态,在控制循环中不断地更新模型和控制算法,实现对系统的精确控制。
MPC的核心思想是将控制问题转化为优化问题,通过最优化算法求解出最优的控制策略。
MPC的应用范围十分广泛,特别适用于需要对系统动态响应进行精确控制的场合,如过程控制、机械控制、化工控制等。
MPC 在控制精度、鲁棒性、适应性等方面都具有优异的表现,是目前工业控制和自动化领域的主流控制方法之一。
MPC的实现方法一般可分为两种,一种是基于离线计算的MPC,一种是基于在线计算的MPC。
离线计算的MPC是指在系统运行之前,先通过离线计算得到优化控制策略,然后将其存储到控制器中,控制器根据当前状态和存储的控制策略进行控制。
在线计算的MPC则是指在系统运行时,通过当前状态和模型预测计算器实时地优化控制策略,并将其传输到控制器中进行实时控制。
自适应控制自适应控制是指根据系统实时变化的动态特性,自动地调整控制算法和参数,以实现对系统的精确控制。
自适应控制可以适应系统动态响应的变化,提高控制精度和鲁棒性,是现代控制理论中的重要分支之一。
自适应控制的应用范围广泛,特别适用于对控制要求较高的复杂系统,如机械控制、电力控制、化工控制等。
自适应控制可以通过软件和硬件两种实现方式,软件实现是通过控制算法和参数的在线调整来实现,硬件实现则是通过控制器内部的调节器、传感器等硬件来实现。
自适应控制的实现方法一般可分为两种,一种是基于模型参考自适应控制(MRAC),一种是模型无关自适应控制(MIMO)。
MRAC是指通过建立系统的数学模型,基于参考模型的输出来进行控制的方法,适用于系统具有良好动态特性的场合;MIMO则是指在不需要建立系统数学模型的情况下,通过控制器内部的自适应算法来实现控制的方法,适用于系统非线性和时变性较强的场合。

自适应控制什么是自适应控制自适应控制是一种控制系统设计方法,它通过实时监测和调整系统的参数来适应不确定的外部环境和内部系统变化。
自适应控制可以提高控制系统的性能和鲁棒性,使其能够快速、准确地响应不断变化的环境或系统参数。
在传统的控制系统中,通常假设系统的数学模型是已知和固定的。
然而,在实际应用中,系统的动态特性常常受到各种因素的影响,如外部扰动、参数变化、非线性效应等。
这些因素使得传统的控制方法往往无法满足系统的控制要求。
而自适应控制则能够通过不断地观测和在线调整系统参数,使系统能够适应这些变化,并实现良好的控制效果。
自适应控制的基本原理自适应控制的基本原理是根据系统的实时反馈信息来调整控制器的参数。
具体来说,自适应控制系统通常由以下几个部分组成:1.参考模型:参考模型是指描述所期望控制系统输出的理想模型,通常由一组差分方程来表示。
参考模型的作用是指导控制系统的输出,使其能够尽可能接近参考模型的输出。
2.系统模型:系统模型是指描述被控对象的数学模型,包括其输入、输出和动态特性。
系统模型是自适应控制的重要基础,它确定了控制系统需要调整的参数和控制策略。
3.控制器:控制器是自适应控制系统的核心部分,它根据系统输出和参考模型的误差来实时调整控制器的参数。
控制器可以通过不同的算法来实现,如模型参考自适应控制算法、最小二乘自适应控制算法等。
4.参数估计器:参数估计器是自适应控制系统的关键组件,它用于估计系统模型中的未知参数。
参数估计器可以通过不断地观测系统的输入和输出数据来更新参数估计值,从而实现对系统参数的实时估计和调整。
5.反馈环路:反馈环路是指通过测量系统输出并将其与参考模型的输出进行比较,从而产生误差信号并输入到控制器中进行处理。
反馈环路可以帮助控制系统实时调整控制器的参数,使系统能够适应外部环境和内部变化。
自适应控制的应用领域自适应控制在各个领域都有广泛的应用,特别是在复杂和变化的系统中,其优势更为突出。
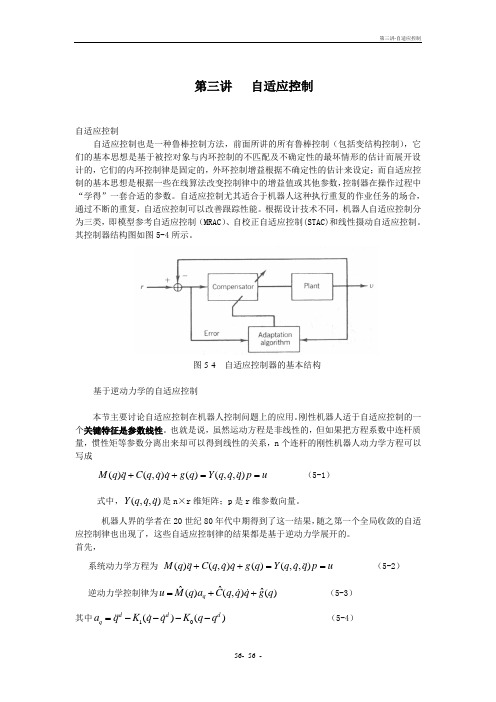
第三讲 自适应控制自适应控制自适应控制也是一种鲁棒控制方法,前面所讲的所有鲁棒控制(包括变结构控制),它们的基本思想是基于被控对象与内环控制的不匹配及不确定性的最坏情形的估计而展开设计的,它们的内环控制律是固定的,外环控制增益根据不确定性的估计来设定;而自适应控制的基本思想是根据一些在线算法改变控制律中的增益值或其他参数,控制器在操作过程中“学得”一套合适的参数。
自适应控制尤其适合于机器人这种执行重复的作业任务的场合,通过不断的重复,自适应控制可以改善跟踪性能。
根据设计技术不同,机器人自适应控制分为三类,即模型参考自适应控制(MRAC )、自校正自适应控制(STAC)和线性摄动自适应控制。
其控制器结构图如图5-4所示。
图5-4 自适应控制器的基本结构基于逆动力学的自适应控制本节主要讨论自适应控制在机器人控制问题上的应用。
刚性机器人适于自适应控制的一个关键特征是参数线性。
也就是说,虽然运动方程是非线性的,但如果把方程系数中连杆质量,惯性矩等参数分离出来却可以得到线性的关系,n 个连杆的刚性机器人动力学方程可以写成u p q q q Y q g q q q C qq M ==++),,()(),()( (5-1) 式中,),,(q qq Y 是n ×r 维矩阵;p 是r 维参数向量。
机器人界的学者在20世纪80年代中期得到了这一结果,随之第一个全局收敛的自适应控制律也出现了,这些自适应控制律的结果都是基于逆动力学展开的。
首先,系统动力学方程为 u p q q q Y q g q q q C qq M ==++),,()(),()( (5-2) 逆动力学控制律为ˆˆˆ()(,)()qu M q a C q q q g q =++ (5-3) 其中10()()dddq a q K q q K q q =---- (5-4)d q 是理想的轨迹,d q qe -=是位置跟踪误差。
ˆˆˆˆ,,,M C g p 分别为M ,C ,g ,p 的估计值。

基于Lyapunov稳定性理论的模型参考⾃适应控制0 引⾔中,Lyapunov 稳定性理论就是设计⾃适应率的有效⼯具。
这种基于稳定性理论的设计保证了系统的稳定[3],所以受到更⼴泛的应⽤。
⾃适应控制的定义到⽬前为⽌尚未统⼀,争议也⽐较多。
综合起来⾃ 2 基于Lyapunov稳定性理论设计控制规律适应控制系统主要有三个特征[1]:1)在线进⾏系统结构和参数的辨识或系统性能指标的度量,以便得到系统当前状态的改变情况;2)按照⼀定Lyapunov 提出了运动稳定性的⼀般理论,即Lyapunov 第⼀法和的规律确定当前的控制策略;3)在线修改控制器的参数或可调系统的输Lyapunov 第⼆法。
前者通过求解系统微分⽅程,然后根据解的性质判断系⼊信号。
现在应⽤⽐较⼴泛的⾃适应控制系统主要有两类:模型参考⾃适统的稳定性;后者不需要求解系统⽅程,⽽是通过具有⼴义能量属性的应控制和⾃校正调节器控制。
本⽂围绕模型参考⾃适应控制进⾏研究,并Lyapunov 函数的标量函数直接判定系统的稳定性。
应⽤Lyapunov 稳定性理利⽤MATLAB 仿真分析其性能。
论设计的控制系统既能求出参数调节的⾃适应规律,⼜确保了系统的稳定1 模型参考⾃适应控制性[4]。
假设被控对象的状态变量可以直接得到。
控制对象的状态⽅程为模型参考⾃适应控制是⼀类重要的⾃适应控制,它的主要特点是实现容易,⾃适应速度快,并在航空、汽车、机器⼈、医疗器械等领域得到了⼴泛应⽤。
模型参考⾃适应控制通过迫使被控对象跟踪特性理想的参考模型,来获得要求的闭环系统性能。
模型参考⾃适应控制系统主要由4部分组成[2],即参考模型、被控对象、⾃适应机构(调整控制器参数)和反馈控制器,如图1所⽰。
图1 模式参考⾃适应控制系统从图1可以看出,这类控制系统包含两个环路:内环和外环。
内环是由调节器、被控过程和反馈控制器组成的普通反馈回路,⽽外环包括参考模型和⾃适应机构等,控制器参数由⾃适应机构调整。
控制系统中的系统辨识与自适应控制在控制系统中,系统辨识与自适应控制是两个关键的方面。
系统辨识是指通过实验或推理的方法,从输入和输出的数据中提取模型的参数和结构信息,以便更好地理解和控制系统的行为。
而自适应控制是指根据系统辨识得到的模型参数和结构信息,实时地调整控制器的参数以适应系统变化,以提高控制性能。
一、系统辨识1.1 参数辨识参数辨识是指确定系统动态模型中的参数。
常用的方法包括最小二乘法、极大似然估计法等。
最小二乘法是一种常见的参数辨识方法,通过最小化实际输出与模型输出之间的误差平方和来确定参数。
1.2 结构辨识结构辨识是指确定系统动态模型的结构,包括确定系统的阶数、输入输出关系等。
常用的结构辨识方法有ARX模型、ARMA模型等。
ARX模型是指自回归外部输入模型,适用于输入输出具有线性关系的系统。
ARMA模型是指自回归滑动平均模型,适用于输入输出关系存在滞后效应的系统。
二、自适应控制自适应控制是根据系统辨识得到的模型参数和结构信息,动态地调整控制器的参数以适应系统的变化。
常用的自适应控制方法有模型参考自适应控制、模型预测控制等。
2.1 模型参考自适应控制模型参考自适应控制是建立在系统辨识模型基础上的控制方法。
通过将系统输出与参考模型输出进行比较,通过调整控制器参数来减小误差。
常见的模型参考自适应控制方法有自适应PID控制、自适应模糊控制等。
2.2 模型预测控制模型预测控制是一种基于系统辨识模型的控制策略,通过对系统未来的状态进行预测,以求得最优控制输入。
模型预测控制可以同时考虑系统的多个输入和多个输出,具有较好的控制性能。
三、应用案例3.1 机械控制系统在机械控制系统中,系统辨识和自适应控制可以被应用于伺服控制系统。
通过系统辨识可以得到伺服电机的动态模型,然后利用自适应控制方法调整PID控制器的参数,以提高伺服系统的响应速度和稳定性。
3.2 化工控制系统在化工控制系统中,系统辨识和自适应控制可以被应用于控制某个反应器的温度。
自适应控制理论基础课后答案篇一一、题目(一)数学学科,第一章,基础难度1. 已知自适应控制系统的状态方程为\(\dot{x} = Ax + Bu\),其中\(A=\begin{bmatrix}0&1\\ 1&2\end{bmatrix}\),\(B=\begin{bmatrix}0\\1\end{bmatrix}\),求系统的特征方程。
2. 对于一个简单的自适应控制模型,其参考输入\(r(t) = 3t + 1\),输出\(y(t)\)与输入\(u(t)\)的关系为\(y(t)= 2u(t 1)\),求当\(t = 2\)时输出\(y(2)\)的值,已知\(u(t)=t^2\)。
(二)控制学科,第三章,中等难度1. 在自适应控制系统中,采用梯度法来调整参数。
已知性能指标\(J = \frac{1}{2}(y r)^2\),其中\(y\)是系统输出,\(r\)是参考输入,系统输出\(y\)关于参数\(\theta\)的梯度\(\frac{\partial y}{\partial\theta}= 2\theta +1\),当\(y = 5\),\(r = 3\)时,求参数\(\theta\)的调整方向(即\(\frac{\partial J}{\partial\theta}\)的符号)。
2. 给定一个自适应控制的离散时间系统\(y(k + 1)=ay(k)+bu(k)\),其中\(a = 0.8\),\(b = 0.5\),初始条件\(y(0)=1\),输入\(u(k)=k\),求\(y(3)\)。
二、答案(一)数学学科1. 对于系统\(\dot{x} = Ax + Bu\),其特征方程为\(\vert\lambda IA\vert = 0\),其中\(I\)为单位矩阵。
\\begin{align}\lambda IA&=\begin{bmatrix}\lambda&0\\0&\lambda\end{bmatrix}\begin{bmatrix}0&1\\ 1&2\end{bmatrix}\\&=\begin{bmatrix}\lambda& 1\\1&\lambda + 2\end{bmatrix}\end{align}\特征方程为\(\lambda(\lambda + 2)+1 = 0\),即\(\lambda^2+2\lambda+ 1 = 0\)。