(整理)23 基于SIMULINK的直升机综合热能管理系统仿真-薛浩(5)
- 格式:doc
- 大小:848.50 KB
- 文档页数:5
楼宇温度控制系统simulink仿真1 目的通过建立楼宇温度控制系统,学习simulink常用模块的使用、参数设置以及simulink仿真的基本流程。
2 Matlab相关模块的说明2.1版本:Matlab2017b2.2可能用到的模块加法器:sum,多个变量求和;增益器:Gain,按比例增大输入;积分环节:对输入求积分;Contant:产生一个常量,是source中最常用的一种;Relay:滞环比较器(迟滞比较器),一般用作有波动系统的缓冲;Sin模块:产生正弦信号,模拟交变信号;Scope模块:示波器;Flaoting Scope:浮动示波器(无需连接);Subsystem模块:将基本单元封装成一个模块。
3 楼宇温控系统的组成3.1楼宇温控系统组成加热器(被控对象)、调温器(控制器)和房间(环境)。
和家庭空调系统类似。
系统简图见下图1。
图1 楼宇温控系统简图3.2楼宇温控系统的基本过程1)调温器(Thermostat)对加热器发出加热信号,控制加热器(Heater)启动加热,加热器产生恒定温度的和速率的加热空气。
2)加热气体被送到房间内和房间内空气产生热交换,将房间(Room)空气加热,同时房间内等体积的空气被抽送到加热器,循环加热,直至温度达到设定值,加热器停止加热。
3)房间内的空气和室外空气存在热交换,导致房间内有热量损失。
3.3室内温度控制的机理分析及建模1)楼宇中央空调一般采用恒温输出,即加热器设定温度为固定值(T_Heater=常数,单位℃),加热器输出恒定质量速率的加热气体M(kg/h)。
2)加热器产生的热增益:dQ/dt=M*C*deltaT(热量公式),C 是空气的比热。
3)室内空气与室外空气通过门窗、墙壁等进行热交换。
其作用机理满足热导(热阻)方程:R=(T1-T2)/P,其中P为功率,R为热阻(单位℃/W)则P=(T1-T2)/R,即dQ/dt=P=(T1-T2)/R。
dQ/dt表示室内空气和室外空气进行交换产生的热增益。
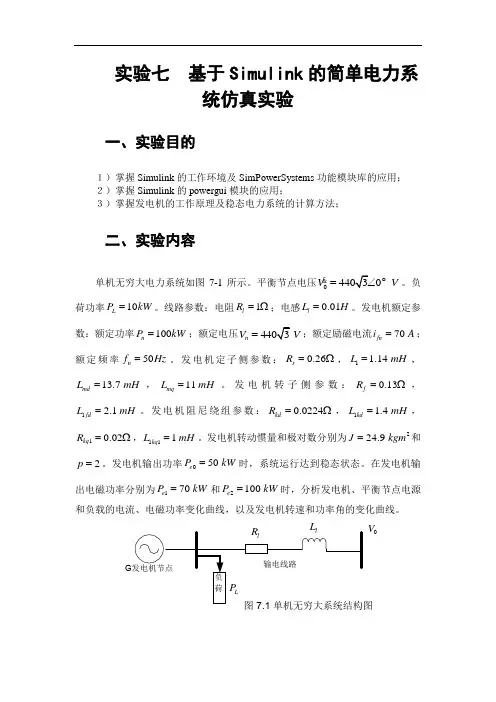
实验七 基于Simulink 的简单电力系统仿真实验一、实验目的1)掌握Simulink 的工作环境及SimPowerSystems 功能模块库的应用; 2)掌握Simulink 的powergui 模块的应用;3)掌握发电机的工作原理及稳态电力系统的计算方法;二、实验内容单机无穷大电力系统如图7-1所示。
平衡节点电压00 V V =︒ 。
负荷功率10L P kW =。
线路参数:电阻1l R =Ω;电感0.01l L H =。
发电机额定参数:额定功率100n P kW =;额定电压n V V =;额定励磁电流70 fn i A =;额定频率50n f Hz =。
发电机定子侧参数:0.26s R =Ω,1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。
发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。
发电机阻尼绕组参数:0.0224kd R =Ω,1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。
发电机转动惯量和极对数分别为224.9 J kgm =和2p =。
发电机输出功率050 e P kW =时,系统运行达到稳态状态。
在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
GV三、实验要求(1)利用SimPowerSystems库中的发电机模型、三相负荷模型建立系统的仿真模型;(2)利用powergui模块,对系统的稳态响应及发电机的初始值进行分析,并给发电机付初始值;(3)利用Bus Selector模块分选出需要的发电机输出参数。
利用Three-Phase V-I Measurement模块测量三相电压与电流参数。
(4)给出平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。

基于Simulink柴油机工作过程的仿真分析
柴油机是一种使用压燃式燃料(如柴油)的内燃机。
它通过压缩和点火来引燃燃料,
产生高温和高压气体,从而驱动活塞运动,进而产生动力。
柴油机广泛应用于汽车、船舶、发电机等领域。
为了更好地理解和研究柴油机的工作过程,可以利用Simulink进行仿真分析。
在Simulink中,可以建立一个柴油机的工作模型,通过添加节点和连接线来构建模型的结构。
可以添加一个燃烧室节点,表示柴油燃烧时产生的高温和高压气体。
然后,可以
添加一个活塞节点,表示活塞在柴油燃烧时的运动。
接下来,可以添加一个曲轴节点,表
示曲轴的旋转运动。
可以添加一个输出节点,表示柴油机输出的动力。
在建立了柴油机的工作模型之后,可以通过设定输入参数来进行仿真分析。
具体来说,可以设置柴油的供给量、燃烧室的压力和温度、曲轴的转速等参数。
然后,可以运行仿真,观察模型的输出结果。
通过Simulink进行仿真分析,可以帮助我们更好地理解柴油机的工作原理和特性。
可以观察到柴油机在不同参数下的输出动力变化情况,从而优化柴油机的设计和调节。
还可
以通过仿真分析来研究柴油机在不同工况下的燃油消耗情况,从而提高柴油机的燃油利用率。
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
simulink热管理故障诊断模型
Simulink 热管理故障诊断模型通常用于识别和解决机电系统中的热管理问题。
该模型可以检测故障,识别故障的位置,并提供解决方法。
具体来说,Simulink 热管理故障诊断模型通常基于先进的故障诊断算法,该算法利用模型数据、传感器数据和其他可用数据来确定故障的位置和类型。
该模型通常包含以下组件:
1. 传感器:用于收集与热相关的信息和数据。
2. 控制器:利用传感器数据和算法来控制系统。
3. 热管理模块:模拟和监控热量的传输和转移,以及热问题的解决方案。
4. 故障诊断算法:对传感器数据和模型数据进行分析,以检测和诊断故障。
5. 用户界面:提供交互式界面,使用户可以监视系统状态,查看故障报告和解决方案。
通过使用Simulink 热管理故障诊断模型,用户可以快速识别和解决机电系统中的热管理问题,并提高系统性能和安全性。
基于Simulink的飞行模拟器操纵负荷系统仿真设计发布时间:2023-02-01T06:35:31.724Z 来源:《科学与技术》2022年第16期8月作者:惠立[导读] 操纵负荷系统作为飞行模拟器至关重要的组成部分,能提供真实操纵力感的模拟,随着伺服控制技术和力矩电机性能的提升,操纵负荷系统逼真度和可靠性的需求也越来越强,在开展详细设计之前,有必要对操纵负荷系统进行全数字仿真,以优化设计、及早发现问题、规避技术风险。
惠立中航西安飞机工业集团股份有限公司陕西西安 710089摘要:操纵负荷系统作为飞行模拟器至关重要的组成部分,能提供真实操纵力感的模拟,随着伺服控制技术和力矩电机性能的提升,操纵负荷系统逼真度和可靠性的需求也越来越强,在开展详细设计之前,有必要对操纵负荷系统进行全数字仿真,以优化设计、及早发现问题、规避技术风险。
本文基于Simulink仿真环境,通过对某型飞行模拟器的操纵负荷系统进行全数字仿真,并设计相应PID控制器,为操纵负荷系统的设计研究提供仿真方法和思路。
关键字:飞行模拟器;操纵负荷系统;仿真;PID;引言近年来,飞行模拟器凭借其经济性、高安全性和可重复性的特点在飞行训练和飞机设计领域越来越多地得到应用,而操纵负荷系统是真实飞机操纵系统的模拟与仿真,其本质上是一套力矩加载系统,能逼真地复现飞机在不同飞行条件下的操纵特性,操纵负荷系统性能好坏直接影响飞行员的训练,影响对飞行模拟器飞行品质的评定。
本文首先介绍力感模拟实现的工作原理;随后在此基础上进行数学建模,主要包括2部分:一是模拟器伺服加载系统的数学模型,二是产生模型力的飞机操纵系统的数学模型;最后在Simulink环境下开展操纵负荷系统仿真设计。
1.工作原理操纵负荷系统是由操纵负荷计算机、驱动单元、执行机构和反馈单元等几部分组成的,操纵负荷系统工作原理如图1所示,当操纵驾驶杆时,操纵负荷计算机接收驾驶杆实时位置信号,并接收主飞行仿真计算机的飞行状态、大气环境等外部信号,经操纵负荷模型的计算,生成模型力(模型回路),将模型力与获取的实测力进行,再对力偏差按照PID调节规律进行调整,输出控制信号,通过电机驱动器,驱动力矩电机实现对操纵机构的加载,使当前实际杆力和模型力实时趋于一致,从而实现力感的逼真模拟(控制回路)。
基于Simulink的直流调速系统仿真及参数优化直流调速系统是一种经典的电机控制系统,其常见应用于电机的调速、转矩控制和位置控制等领域。
Simulink是一种广泛使用的仿真软件,可用于设计、分析和优化各种电控系统。
本文将介绍基于Simulink的直流调速系统仿真及参数优化。
步骤1:建立直流电机模型首先,在Simulink中建立直流电机模型,该模型将包含电机、电力电子模块、速度控制模块和反馈控制模块。
电机模型可以使用Simscape电气库或Simscape库中的电气模块进行建模,也可以手动建立电机模型。
在此,我们将采用Simscape电气库的电气模块进行建模。
步骤2:建立电力电子模块步骤3:建立速度控制模块速度控制模块用于实现电机的速度控制,可以采用基于PID控制器的反馈控制方法,也可以采用模型预测控制方法等高级控制方法。
在此,我们采用简单的PID控制器进行速度控制。
反馈控制模块用于将电机的实际转速与设定转速进行比较,并通过反馈电路对电机的控制信号进行调节。
在Simulink中,我们可以使用Simscape电气库中的传感器模块建立反馈控制模块。
步骤5:仿真分析在完成直流电机模型、电力电子模块、速度控制模块和反馈控制模块的建立后,我们可以进行仿真分析。
通过仿真,我们可以获得电机的转速、转矩、电流等参数,并进行分析和调试。
步骤6:参数优化在直流调速系统设计中,常常需要进行参数优化,以达到系统的最优性能。
首先,我们可以通过仿真分析的结果来确定系统的性能指标和优化目标;其次,我们可以采用优化算法,例如遗传算法、模拟退火算法、差分进化算法等,对系统的参数进行调节,以达到最优控制效果。
总结。
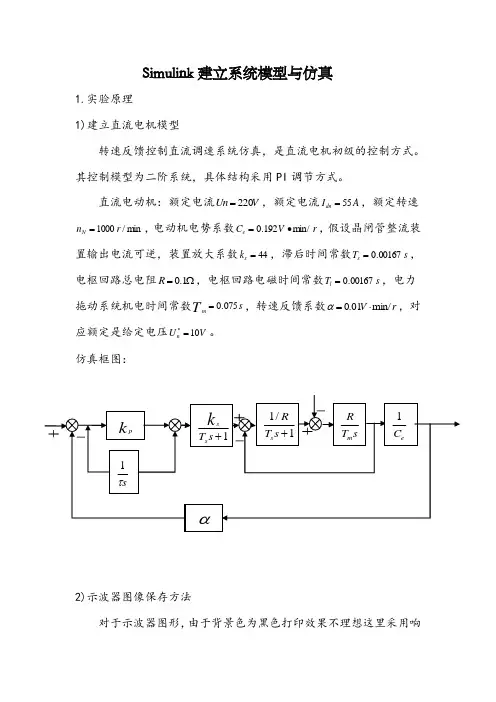
Simulink 建立系统模型与仿真1.实验原理 1)建立直流电机模型转速反馈控制直流调速系统仿真,是直流电机初级的控制方式。
其控制模型为二阶系统,具体结构采用PI 调节方式。
直流电动机:额定电流VUn220=,额定电流AI dn55=,额定转速min/1000r n N =,电动机电势系数r V C emin/192.0∙=,假设晶闸管整流装置输出电流可逆,装置放大系数44=s k ,滞后时间常数sT s00167.0=,电枢回路总电阻Ω=1.0R ,电枢回路电磁时间常数s T l 00167.0=,电力拖动系统机电时间常数s T m075.0=,转速反馈系数r V min/01.0⋅=α,对应额定是给定电压VU n10=*。
仿真框图:2)示波器图像保存方法对于示波器图形,由于背景色为黑色打印效果不理想这里采用响应控制,将其转化为普通图像以方便再加工,涉及语句:>> set(0,'ShowHiddenHandles','On')>> set(gcf,'menubar','figure')首先将示波器窗口置顶,然后在命令行中输入相应语句,就可把示波器图像转化为普通图像,即可在图像编辑窗口进行加工。
2.实验方案1)转速反馈控制直流调速系统仿真图2)仿真步骤首先建立模型,根据公式计算出相应参数,并设置。
其次选择输入信号为阶跃信号进行仿真,仿真时间为0.7s 再次给更改输入信号为单位斜坡信号,再次仿真观察结果。
3)相应仿真设置(1)传递函数设置(2)增益设置(3)斜坡输入设置3.实验结果1)零状态阶跃输入响应(1)中间电流环节相应输出(2)转速响应输出2)单位斜坡输入响应(1)单位斜坡输入响应(2)中间电流环节相应输出(3)单位斜坡转速响应输出4.实验结果分析通过Simulink仿真可以非常方便的得到电机模型的阶跃和斜坡响应。
基于Matlab_Simulink的永磁直驱风⼒发电机组建模和仿真研究-2发电机参数:极对数42;d 轴电抗1.704mL ;q轴电抗1.216mL ;转⼦磁通4.7442Wb ;转动惯量11258J 。
PI 参数:⽹侧电流内环d 轴(1.5、1),q 轴(0.5、37);⽹侧功率外环(0.0002、0.05);直流侧电压(2、120);机侧电流内环d 轴(-3、-24),q 轴(-3、-80);机侧功率外环(-3、-60)。
本仿真中风速由6m/s 变化到9m/s ,最后变化到12m/s 。
在最⼤风能捕获控制情况下,随着风速的变化,转⼦转速不断调整,以保持最佳叶尖速⽐,从⽽达到最⼤风能利⽤,图8为风速、转⼦转速、机械和电磁转矩变化曲线。
机侧电压电流变化如图9所⽰,在最⼤风能捕获模式下,电压和电流频率随着风速的增⼤⽽增⼤,电压幅值从260V 变化到400V 、540V ,电流幅值变化为380A 、850A 、1500A 。
电⽹侧及直流侧电压电流变化如图10所⽰,电⽹电压保持恒定,电流幅值随着风速的增⼤⽽增⼤变化范围为:168A 、580A 、1290A 。
直流侧电压在风速突变时有⼀个充电过程,电压升⾼,最⾼达到1320V ,经过⼤约0.1s的暂态过程后恢复到额定值1200V 。
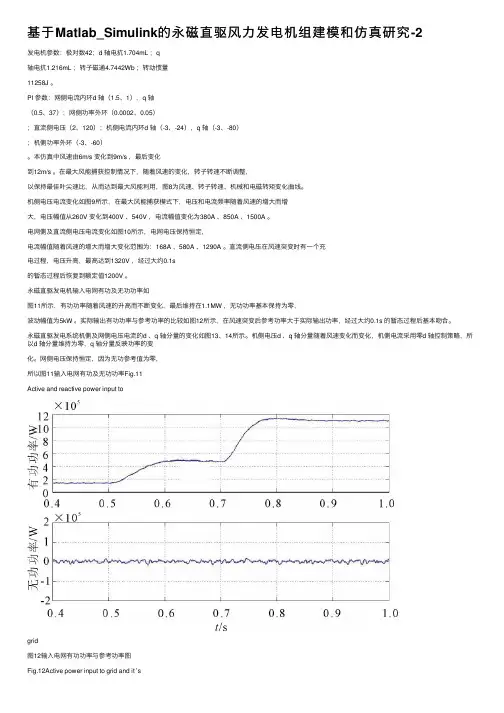
永磁直驱发电机输⼊电⽹有功及⽆功功率如图11所⽰,有功功率随着风速的升⾼⽽不断变化,最后维持在1.1MW ,⽆功功率基本保持为零,波动幅值为5kW 。
实际输出有功功率与参考功率的⽐较如图12所⽰,在风速突变后参考功率⼤于实际输出功率,经过⼤约0.1s 的暂态过程后基本吻合。
永磁直驱发电系统机侧及⽹侧电压电流的d 、q 轴分量的变化如图13、14所⽰。
机侧电压d 、q 轴分量随着风速变化⽽变化,机侧电流采⽤零d 轴控制策略,所以d 轴分量维持为零,q 轴分量反映功率的变化。
⽹侧电压保持恒定,因为⽆功参考值为零,所以图11输⼊电⽹有功及⽆功功率Fig.11Active and reactive power input togrid图12输⼊电⽹有功功率与参考功率图Fig.12Active power input to grid and it ’sreference第27卷第9期电⽹与清洁能源图10电⽹侧及直流侧电压电流变化Fig.10Variation of voltage and current of grid and DC side 图9机侧电压电流变化Fig.9Variation of generator-side voltage andcurrent图8风速、转⼦转速、转矩变化Fig.8Variation of wind speed,rotor speed andtorqueClean Energy97电流q 轴分量为零。
1.课题名称:“基于Matlab/Simulink软件的核电站仿真”2.检索要求:检索年限:下面说明期刊范围限定:下面说明3.检索数据库:CNKI 、重庆维普4.检索步骤:(1)课题分析:首先确定主要内容,包括simulink软件是什么,核电站怎样用其仿真等等,然后确定课题范围:涉及到自然科学(数学建模),还涉及到环境科学、社会科学等等;(2)写出反映课题内容的关键词,找出同义词、近义词、上词:Simulink 、核电站(核电厂、核能发电站、原子能发电厂、原子能电站、核动力装置)、仿真(模拟)(3)分析检索词之间的逻辑关系:检索式:(核电站OR核电厂OR核能发电站OR原子能发电厂OR原子能电站OR核动力装置)AND(Simulink)AND (仿真OR模拟OR模仿)(4)确定检索方式:传统检索、高级检索(5)调整检索结果:按主题顺序、按时间顺序(6)选择相关文献10篇左右如何保存检索出的题录信息?在检索结果中选中您要导出的文献,点击“导出分析”,再次选中文献后点“导出/参考文献”,选择需要保存的格式,然后输出到本地文件即可。
(7)按照“GB7714-2005文后参考文献著录规则”对选中的文献进行著录。
关于CNKI,系统可以生成规范具体的检索报告。
选中的文献著录,也在生成的检索报告中列出。
(8)分析检索结果,命中多少条记录,其中有多少是相关的,多少是不相关的(误检),并简单分析原因。
(9)写出1000字左右的文献综述(选作)一、CNKI传统检索(1)1.检索条件:全文 = simulink 并且全文 = 核电站并且全文 = 仿真(模糊匹配)2.检索年限、期刊范围:不限3.检索结果:按主题排序4.分析检索结果:命中36条,30条相关,6条不相关。
全文检索的检全率高。
但可能会有误检。
误检原因:全文检索,只要文献出现相关关键词即可收入检索结果,所以就会误检到只是简单提及而并不相关的文献。
(2)更改检索条件为:主题 = simulink 并且( 全文 = 核电站并且全文 = 仿真 ) (模糊匹配)分析检索结果:命中6条,相关6条,此次检索结果较少。
基于Simulink的直升机抗干扰控制律的设计与仿真作者:张娜娜朱荣刚杨立一来源:《现代电子技术》2013年第21期摘要:直升机是一种比较复杂的飞行器,基于工程需求,直升机机体腹部安装了一个可以打开和收起的外挂部件,该外挂部件的转动会给直升机带来周期性的力和力矩扰动。
针对输入扰动响应的特点,提出了抑制扰动的前馈控制方案。
详细介绍了前馈控制律的设计思想和基于傅里叶变换的控制信号的提取方法,得到了最终的设计结果并进行了相应的仿真验证。
Simulink仿真结果表明,所采用的前馈控制方案能够较好地抑制干扰造成的姿态角波动,证明所提出的控制方案可行且有效,证明了该控制律对外挂部件在任意转速下都能达到较为满意的抗干扰的效果。
关键字:直升机;外挂部件;前馈控制;傅里叶变换中图分类号: TN966⁃34; V249.1 文献标识码: A 文章编号: 1004⁃373X(2013)21⁃0113⁃040 引言人类的航空史始于16世纪,从那时起,人类开始尝试向往着飞向蓝天。
而直升机的雏形可追溯到公元前400年,即竹蜻蜓的诞生。
从空气动力角度看,竹蜻蜓依靠气动力实现垂直升空飞行正是现代直升机旋翼的基本工作原理[1⁃2]。
基于工程需求,在直升机机体腹部安装了一个可以打开和收起的外挂部件,该部件在工作时会因转动对飞机的方程造成影响,因此需要设计一种控制方案能抑制该扰动。
该外挂部件以匀速转动方式进行工作,且转速可以调节。
在直升机飞行过程中,当外挂部件处于不同转角位置时,其扰流特性对直升机而言相当于一个干扰源,作用在外挂部件上的气动力(矩)会对直升机的姿态造成干扰。
要求提出相应的控制方案并设计对应的控制输入,以抑制部件对直升机姿态的扰动影响。
利用直升机的小扰动方程,在直升机状态方程中添加输入扰动[f,]建立新的直升机控制系统模型,进行数字仿真,研究只加入输入扰动[f]时直升机的响应特性,仿真得出外挂部件在特定转速下对直升机造成的干扰响应,采用傅里叶变换提取出稳态干扰响应中的周期信号,作为抑制干扰的控制信号,通过前馈控制器抑制扰动的影响[3]。
基于 Simulink的支柱式起落架落震仿真分析摘要:本文研究了直升机支柱式起落架的落震仿真分析方法并在力学分析的基础上利用Simulink建立了落震仿真分析模型。
将仿真结果与试验数据对比后发现两者相吻合,故本文基于Simulink的起落架落震仿真分析理论和方法可信,可作为起落架设计人员的参考借鉴。
关键词:支柱式起落架;落震仿真;Simulink引言直升机起落架着陆性能评估是起落架研制过程中的重要环节之一,研发人员通过理论计算和落震试验对油气式起落架的填充参数等进行调整并验证其着陆性能。
在做性能计算时通常借助编程工具编写程序进行计算或者使用商业软件计算。
前者需要调试繁多的代码,比较不便,后者虽使用简单但用户不能自主控制算法且导航式建模建立的模型难与实际符合。
MATLAB中的Simulink是实现动态系统建模的仿真工具,其优点有:(1)可自由编写用户自定义模块;(2)模块输入/输出端口间可快速连接,实现参数和变量在模块之间传递;(3)丰富的库模块便于使用。
本文以支柱式起落架为例,应用Simulink进行落震仿真分析。
1.支柱式起落架结构及受力分析支柱式起落架结构简单,传力直接,其主要由缓冲器、扭力臂、机轮、轮胎等组成。
缓冲器控制着陆过载和吸收直升机着陆能量,其运动方式为缓冲器活塞杆和外筒之间沿轴向相对运动。
为分析起落架着陆过程中各部分的运动和受力情况,现将机体和起落架的质量简化为集中质量(如图2所示),其中包括:1)弹性支承质量m:位于缓冲器空气弹簧之上,为起落架所分配的机体减缩质量与外筒质量之和;2)非弹性支承质量mk:集中于轮轴中心,包括活塞杆、刹车装置、机轮、轴座等质量。
本文仅考虑前飞速度为零的工况,故y方向据牛顿第二定律可得:,,式中L为旋翼升力系数,SH为缓冲器行程,其它参数见如图1。
图1 起落架受力分析2、缓冲器载荷缓冲器主要由外筒、活塞杆、柱塞组件、节流阀和高、低压浮动活塞等组成。
缓冲器压缩过程分为单腔压缩和双腔压缩两个阶段,需分段计算。
................. ................. 第二十八届(2012)全国直升机年会论文 基于SIMULINK的直升机综合热能管理系统仿真
薛 浩 甘晓燕 唐宇 (北京陆军航空兵学院机械系,北京,101123)
摘 要:机载综合热能管理可以实现机上能量互补,是直升机的发展方向。本文根据直升机特点提出两种热能管理系统方案,并利用数学模型在SIMULINK平台上搭建仿真模块,在一定高度和速度下设计了系统的结构尺寸,在不同高度和速度下利用控制器控制各阀门和泵的转速,使系统能满足温度压力等要求,结果表明,利用综合热能管理系统可以实现对全机热量的统一管理与调配,实现能量互补。 关键词:综合热能管理系统;稳态仿真;SIMULINK;
0 引言
随着直升机综合技术的发展,机上环控系统和各种热源可以进行能量的互补利用,综合热能管理系统就是实现这一目的的,它是传统的环控系统向新一代热能管理组件技术上的一次升级,如美国战斗机F22上就采用了这种系统。这种复杂的热工系统具有两大技术特征:1、把过去机上的空气制冷系统、蒸汽制冷系统、液体冷却系统、滑油散热系统、发动机燃油系统等大量存在“热量和能量交换”的相关系统有机的关联融合起来,设计制造成经济性好、可靠性高的综合热能系统。2、采用先进的数字化综合控制技术完成复杂系统内部热量与能量的统一调配与管理,达到全机热能的最佳利用[1]。 与传统环控系统相比具有能源利用率高,重量轻等优点,因此进行机载综合热能管理,实现能量的合理利用是未来直升机一体化设计的一个发展方向。本文基于此目的提出直升机综合热能管理系统方案,并进行了仿真计算。
1 综合热能管理系统 1.1 系统概述 根据直升机环控和热源特点[2],提出两种综合热能管理系统方案,系统原理见图1,图2,其中图1为一般直升机综合热能管理图,图2为带有大功率电子设备(如大功率雷达)的原理图,图1的系统包括3个子系统:(1) ACS(空气循环系统);(2)润滑油循环系统;(3)燃油循环系统。图2增加了VCS(蒸发循环系统)和冷却液循环系统。 图1系统其原理为:ACS为简单式,主要向座舱和电子舱提供足够的制冷量,以达到空气调节的目的。气源来自发动机或辅助动力装置,一路经过空气散热和燃油散热降温除水,再经过涡轮膨胀降温除水,一部分供给电子设备舱,一部分与另一路热气混合后供给驾驶舱和客舱;燃油循环系统利用燃油吸收其他系统热量,并提高燃油温度以提高燃烧效率,来自油箱的燃油经过空气-燃油换热器吸收热量,再经过燃油-滑油换热器吸收滑油热量,一部分供给发动机燃烧,一部分经过散热后流回油箱;滑油循环系统利用燃油来降温;ACS中涡轮输出功带动风扇,驱动大气对燃油和ACS气体降温。 图2系统对比图1系统增加了 VCS和冷却液循环系统,以提高对大功率电子设备的散热效果,在燃油循环系统中,燃油经过燃油-空气换热器,再经过VCS中的冷凝器以吸收热量;冷却液循环系统直接吸收电子设备A的热量,并通过蒸发器将电子舱B的热负荷传递给VCS,VCS采用蒸汽压缩式................. ................. 制冷循环。在系统中,燃油以此经过各换热器吸收热量,从而作为热沉,实现全机综合热能管理。
左发右发动机辅助动力装置
座舱单向阀
电子设备舱B
滑油-燃油换热器齿轮轴承
空气过滤器滑油泵 压力控制器
燃油泵
燃油调节器
燃油箱燃油散热器
风扇喷水器
喷水器空气换热器
文氏管
高压除水器空气-燃油换热器
低压除水器热路阀门
蝶形阀
涡轮
1
23456
78
91011
12
图1 系统1原理图 左发冷凝器蒸发器
右发动机辅助动力装置
座舱单向阀
电子设备舱B
滑油-燃油换热器齿轮轴承膨胀阀空气过滤器
电动机滑油泵 压力控制器
压缩机电子
设备舱A燃油泵
冷却液泵
燃油调节器
燃油箱燃油散热器
风扇喷水器
喷水器空气换热器
文氏管
高压除水器空气-燃油换热器
低压除水器热路阀门
蝶形阀
涡轮
1
234567
8
9
1011
121314
图2 系统2原理图.................
................. 1.2 参数选择 取一般巡航状态,飞行高度1km,马赫数0.25作为系统的设计状态点,冷却燃油最高温限为160℃,燃油箱的温度与大气温度相同,滑油换热器滑油出口温度要求低于60℃,电子舱A的出口温度要求低于50℃,座舱排气温度要为23℃。座舱热载荷随高度变化,电子舱A、B热载荷分别为3kw和25kw,滑油热载荷为10kw。冷却液为PAO(聚烯烃),制冷剂为氟利昂R134a。[1]环路流量的设定为:燃油流量0.5kg/s,冷却液流量1.8 kg/s,蒸发循环工质流量0.56 kg/s,滑油流量0.1 kg/s。[3]
2 系统建模 本文所研究的综合热能管理系统各部件的数学模型是通过理论分析或特性曲线的拟合建立的。各部件模型只对系统运行情况进行模拟,不对部件内部的运行机制作深入研究,故建立的模型主要是能反映输入输出参数之间的关系。主要部件基本数学模型为: 2.1换热器数学模型
无相变换热器均为三角翅片叉流型式,温度的计算采用NTU法:[4] 换热量:)(,2,1minininTTC温度:ininoutC
TT
其中:为换热效率 ]}1)[exp(exp{178.0**22.0NTUCC
NTU
NTU表示换热单元数; ),min(,2,1minininCCC,wcCp, pc
为比热,w为质量流量。
2.2涡轮风扇数学模型 风扇升温:21tccwTTtw;风扇压比:3.5(1)ccccitt 涡轮温度:)))1(1(1(112kkttTT;涡轮功率:])1(1[11kkttpttTcwW
其中w为质量流量,c为压比,t为膨胀比,为效率,k为绝热指数。 2.3 流量泵模型 由相似方程计算:
DDwnnw
DD
PnnP33
Dn,Dw,DP为额定转速,额定流量和额定功率。
2.4 冷凝器与蒸发器数学模型 ................. ................. 冷凝器分两相区、过热区和过冷区;蒸发器分两相区和过热区。[2][3] 制冷剂侧换热能量守衡方程: TKFhhmQRoutRinRR)(,,
PAO侧能量守衡方程:
RLoutLinpLQTKFTTcm)(,,
其中:LwRFRFKF)(1)(1100
Rm为质量流量,h为焓值,F为换热面积,0为换热效率,为换热系数。[5]
3 系统仿真 该系统仿真在SIMULINK平台上进行,利用模块化建模的思想,分别建立各个部件的数学模型[6],然后将各个子系统连接成整个系统(图3)。仿真计算时考虑到系统在设计状态和非设计状态的
运行。设计状态用来确定模型的结构参数,非设计计算状态用来验证模型。表1为设计状态下各环路流量的值。
图3 综合热能管理系统SIMULINK模型 表1 设计状态下各环路的流量kg/s 支路和环路 引气流量 空气换热器冷边 燃油环路 冷却液环路 蒸发循环 滑油循环 系统1 0.106 0.467 0.5 --- --- 0.1 系统2 0.139 0.467 0.5 1 0.168 0.1
在仿真过程中发动机引气口冷路阀门及时调整满足座舱和电子舱制冷要求,热路温控阀门及时调整以满足座舱供气温度的要求,冷却液环路流量控制器控制冷却液经过热载荷的出口温度满足要求,滑油流量控制器使滑油温度满足要求,燃油流量控制器保证燃油不会超温并满足散热要求。仿真结果可以在一定范围内的不同高度和速度下可以基本满足各子系统要求,在速度和高度较低的情况下,制冷量需求较大,需要较高的引气流量和液体流量,在高度较高时,座舱内需要制热,引气................. ................. 量有所降低,在速度较大时,由于空气换热器冷边流量较大,引气量可以适当减少,大功率电子设备的散热效果主要取决于蒸发循环的流量。
4 结论 本文在SIMULINK下对提出的两种直升机综合热能系统进行了稳态仿真。结果表明,利用综合热能管理系统,能够有效利用能源热量互补,并且满足环控系统和其他子系统的要求。本文作为综合热能管理系统的初步研究,可以为系统部件设计提供参考,在进一步进行实验研究的基础上完成对于综合热能管理系统的建立。
参 考 文 献 [1] R.S.Figliola,Robert Tipton. An Exergy-Based Methodology for Decision-Based Design of Integrated Aircraft Thermal Systems[J].AIAA.2000-01-5527. [2] 崔利,薛浩.直升机环控系统对比与展望[J].装备环境工程.2010 06(7-3) [3] 薛浩.战斗机综合热能管理系统稳态仿真[J].飞机设计.2010.03 [4] 飞行器环境控制[M].北航出版社:寿荣中,何慧姗,2004 [5] 邹冰.飞机环境控制系统仿真及优化研究[D].北京:北京航空航天大学航空科学与工程学院,2005 [6] 宋俊,袁修干. MATLAB在飞机环境控制系统仿真中的应用[J].北京航空航天大学学报.2002,28(1):44-46
Based on the helicopter integrated thermal management system simulation in SIMUILNK Xuehao Ganxiaoyan Tangyu (Chinese army aviation institute. Beijing 101123)
Abstract: Airborne integrated thermal management can be achieved on energy complementary, it is the direction of development of the helicopter, based on helicopter characteristics two integrated thermal management system program use mathematical models to build a simulation module in SIMULINK platform, designed in a certain height and speed to make structure size of the system and use the controller to control the valves and the loop flow in different heights and speeds, allowing the system to meet the temperature and pressure requirements, the results show that the use of integrated thermal management system can be achieved on unified management of the heat and deployment of complementary energy. Key words: Integrated thermal management system; SIMULINK;