同步算法比较
- 格式:doc
- 大小:11.50 KB
- 文档页数:1

同步方法和同步块的区别
同步方法和同步块都是为了保证多线程环境下的数据安全性,避免多个线程同时访问共享资源导致的数据竞争和不一致性问题。
然而,它们之间也存在一些区别。
1. 粒度:同步方法是以方法为单位进行同步,而同步块可以选择以代码块为单位进行同步。
同步方法对整个方法进行同步,而同步块可以选择对某个特定的代码块进行同步,这样可以在一些情况下提高性能。
2. 同步对象:同步方法的同步对象是当前对象(即this),而同步块的同步对象可以是任意对象。
同步方法的同步对象是当前对象,这意味着如果一个类中有多个同步方法,它们会争夺同一个锁。
同步块使用的是指定的对象作为同步对象,不同的同步块可以使用不同的同步对象,从而提供更细粒度的锁机制。
3. 锁释放:同步方法在方法执行完毕或者抛出异常的情况下会自动释放锁,而同步块需要手动释放锁。
同步方法在方法运行结束后会释放锁,而同步块如果没有手动释放锁,可能会导致死锁等问题。
4. 可见范围:同步方法的范围是整个方法,而同步块的范围可以更灵活,可以选择只对部分代码块进行同步,从而减小同步的范围,提高性能。
总之,同步方法和同步块都可以用来保证多线程环境下的数据安全性,但在使用时需要根据实际情况选择合适的方式。
同步方法的优势在于简单,适用于整个方
法需要同步的情况;同步块的优势在于灵活,可以对特定的代码块进行同步。
0引言非线性环节经常存在于液压伺服系统中,而死区、摩擦和滞环等非线性环节又是未知和时变的。
为解决上述问题,很多方案已被提出,但各有缺陷,例如PID 控制器较难获得满意的控制效果,自适应控制通常要求较快的CPU 执行速度,对于时变性较快的液压控制系统难于达到良好的实时性。
自模糊控制器出现以来,得到了广泛应用。
通常模糊控制器由语言性控制规则构成,对于输入和输出变量之间的关系,采用条件语句描述,所以其优点就是能模仿人类操作者的动作,另一优势是可应用于数学模型不确定甚至模型未知的系统。
然而,当系统误差趋于零时,模糊控制器可能出现振荡和较大的稳态误差。
针对这一缺陷,本文设计了PID 、Fuzzy 和Fuzzy-PID 复合控制器,并分析比较其各自特点和在液压同步系统中的应用,为检验和分析控制器控制性能,本文将这几种控制算法应用于电液位置同步系统中实时控制检验控制效果。
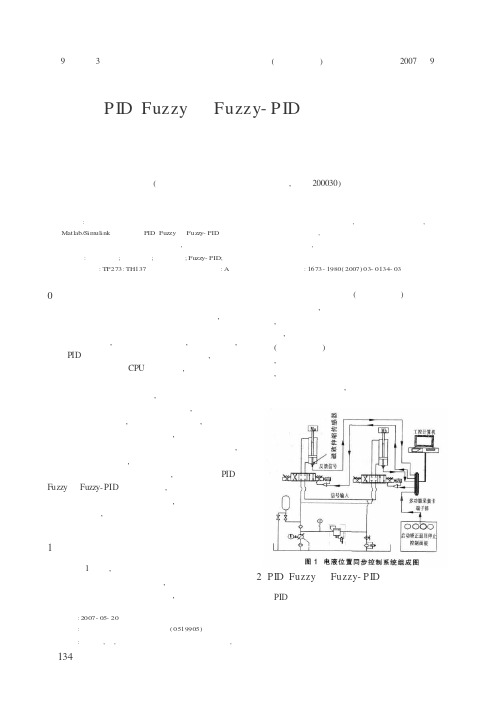
1电液位置同步控制系统组成如图1所示,该系统由同一油源供油的两套相同的液压回路组成。
由图可知,电液伺服同步系统采用一对比例换向阀控制伺服缸,液压缸内部装有磁致伸缩直线位移传感器(模拟量输出)用于实时检测液压缸的位移,反馈信号连接到多功能采集卡端子排,送反馈信号到多功能采集卡。
采集卡内部有滤波电路,可以对采集到的信号进行滤波处理。
同时控制器(工业计算机)根据要求的运动命令信号和反馈信号,分析计算后求得系统的控制信号分别送给比例阀,比例阀根据电信号的强弱将运动结果反映在两液压缸的位移变化上,这样一个控制运动周期完成。
经过多个控制周期后系统完成指定的运动。
图1电液位置同步控制系统组成图2PID 、Fuzzy 及Fuzzy-PID 控制器设计PID 控制是在工业过程中历史最久、生命力最PID 、Fuzzy 及Fuzzy-PID 算法在液压同步系统中的应用比较邱士浩芮丰胡大邦胡军(煤炭科学研究总院上海分院液压所,上海200030)摘要:介绍了三种控制算法在液压同步系统中的应用和比较。

无线传感器网络时间同步方法研究随着物联网技术的快速发展,无线传感器网络(Wireless Sensor Networks, WSNs)已经成为实现智能化、自动化和联网化的重要要素之一。
在WSNs中,时间同步是一项关键技术,它可以确保网络节点之间的时间一致性,从而实现数据的准确收集和处理。
本文将探讨无线传感器网络时间同步方法的研究,包括时钟同步协议和时间误差补偿方法。
一、时钟同步协议时钟同步协议旨在使WSNs中的节点能够在一个全局共享的时间轴上保持一致。
常见的时钟同步协议包括以下几种。
1.1 Berkeley算法Berkeley算法是一种分布式时钟同步算法,它通过选举一个特殊节点作为时间服务器来实现同步。
该算法将网络节点分为两类:时间服务器和普通节点。
时间服务器通过周期性地向所有普通节点广播时间信息来同步网络。
普通节点根据接收到的时间信息调整自己的时钟。
由于该算法采用分布式的方式,节点之间的通信开销相对较小,适用于大规模的WSNs。
1.2 RBS算法RBS(Reference Broadcast Synchronization)算法是一种基于参考广播的时钟同步算法,通过以广播方式将时间信息传播给其他节点来实现同步。
该算法先选举一个特殊节点作为参考节点,该节点拥有一个精确的时钟源。
参考节点周期性地广播时间信息,并且其他节点在接收到广播后根据参考节点的时间信息进行时钟的调整。
RBS算法适用于小规模的WSNs,但对网络中的通信开销较大。
1.3 FTSP算法FTSP(Flooding Time Synchronization Protocol)算法是一种基于洪泛方式的时钟同步算法,它通过广播方式将时间信息传播给所有其他节点。
FTSP算法基于对跳数的计算来估计节点之间的时钟差,并通过协调函数来调整时钟。
由于该算法采用全节点通信的方式,能够实现较高的同步精度。
二、时间误差补偿方法时间误差是指节点自身时钟与参考时间的差值,由于节点硬件等原因,时钟会存在一定的误差。

灯光同步算法1. 简介灯光同步算法是一种用于控制多个灯光设备同步工作的算法。
在各种场景中,如舞台演出、照明系统、建筑外观装饰等,需要多个灯光设备精确地协调工作,以创造出统一的效果。
灯光同步算法通过精确的时间同步和数据传输,使得多个灯光设备能够在时间和空间上保持一致,从而实现协调的灯光效果。
2. 灯光同步算法的原理灯光同步算法的核心原理是通过时间同步和数据传输来实现多个灯光设备的协调工作。
下面将详细介绍灯光同步算法的原理。
2.1 时间同步时间同步是灯光同步算法的基础,它确保多个灯光设备的时钟保持一致。
常用的时间同步方法有以下几种:2.1.1 GPS同步一种常用的时间同步方法是使用全球定位系统(GPS)来同步灯光设备的时钟。
GPS 接收器可以接收到来自卫星的精确时间信号,通过将该信号传递给灯光设备,可以实现时钟的同步。
2.1.2 NTP同步网络时间协议(NTP)是一种用于在计算机网络中同步时钟的协议。
通过使用NTP服务器,灯光设备可以通过网络来同步时钟。
NTP同步可以实现高精度的时间同步。
2.2 数据传输数据传输是灯光同步算法的另一个重要组成部分,它确保多个灯光设备能够在时间和空间上保持一致。
常用的数据传输方法有以下几种:2.2.1 有线传输有线传输是一种可靠且高效的数据传输方法。
通过使用有线连接,多个灯光设备可以直接传输数据,以实现同步工作。
有线传输可以提供较低的延迟和较高的数据传输速率。
2.2.2 无线传输无线传输是一种方便且灵活的数据传输方法。
通过使用无线通信技术,如蓝牙、Wi-Fi等,多个灯光设备可以无需物理连接而进行数据传输。
无线传输可以提供较高的灵活性和便利性,但可能会受到干扰和延迟的影响。
2.3 算法实现在灯光同步算法的实现中,需要综合考虑时间同步和数据传输的方法,以实现多个灯光设备的协调工作。
以下是灯光同步算法的一种实现方式:1.所有灯光设备通过GPS或NTP同步其时钟,以保持一致的时间基准。

时钟同步算法
时钟同步算法是计算机网络中的一种重要算法,它的作用是将网络中各个计算机的时钟同步,以保证计算机之间的通信和数据传输的准确性和可靠性。
时钟同步算法有多种实现方式,下面将介绍其中的两种常用算法:NTP和PTP。
NTP(Network Time Protocol)是一种广泛应用的时钟同步协议,它可以在互联网上实现高精度的时钟同步。
NTP的工作原理是通过向网络中的时间服务器发送时间请求,然后根据服务器返回的时间信息来调整本地时钟。
NTP协议采用了一种分层的时间服务器结构,每个时间服务器都可以向上级服务器请求时间信息,以保证时间信息的准确性和可靠性。
NTP协议的优点是具有高精度、高可靠性和广泛应用等特点,但缺点是需要较高的网络带宽和较长的时间延迟。
PTP(Precision Time Protocol)是一种新型的时钟同步协议,它可以在局域网内实现高精度的时钟同步。
PTP的工作原理是通过向网络中的主时钟发送时间请求,然后根据主时钟返回的时间信息来调整本地时钟。
PTP协议采用了一种分层的时钟结构,每个时钟都可以向上级时钟请求时间信息,以保证时间信息的准确性和可靠性。
PTP协议的优点是具有高精度、低延迟和适用于局域网等特点,但缺点是需要较高的硬件要求和较长的配置时间。
总的来说,时钟同步算法是计算机网络中的一种重要算法,它可以保证计算机之间的通信和数据传输的准确性和可靠性。
NTP和PTP是两种常用的时钟同步算法,它们各自具有优点和缺点,可以根据实际需求选择合适的算法。
在实际应用中,时钟同步算法的选择和配置需要考虑多种因素,如网络带宽、时间延迟、硬件要求等,以保证算法的准确性和可靠性。
进程同步互斥算法一、什么是进程同步和互斥说到进程同步和互斥,咱们得先聊聊什么是“进程”这个东西。
进程其实就像是咱们做事的“任务”,大家可以想象一下,进程就像是你手上的一堆待办事项,每一个待办事项都是一个进程,大家一起在执行,各自独立,但又得协调好,免得乱了套。
比如说,你在做饭、你朋友在洗碗,你爸在修理车,大家都在忙各自的活,可是有个问题:万一厨房里只有一个锅,大家都要用,那锅就得排队了,谁先谁后得有个规定,这样才能避免抢锅。
这里面就涉及到“同步”和“互斥”两个概念。
同步嘛,简单说就是大家都得按规则一起做某件事,不能随便。
比如大家一起等着锅热好再开始做菜,谁也不能提前。
互斥呢,就是谁也不能和别人抢一样的资源,譬如锅,咱们只有一个锅,大家不能都抢着用,得排队。
进程同步就是为了确保大家按时按规矩做事,进程互斥则是为了避免资源争抢,免得弄得鸡飞狗跳。
二、进程同步和互斥的经典算法说到这些,大家可能会问了:“那这个同步互斥咋实现呢?难不难?”放心,实际上有一些经典的算法,可以帮助咱们“巧妙”地安排这些进程,避免乱成一团。
最常见的就是“信号量”和“互斥锁”了。
这个信号量就像是一个特殊的钥匙,钥匙多了,大家就可以同时干活;钥匙少了,只有一个进程能获得权限。
信号量常分为二值信号量和计数信号量,二值信号量就像是一个“开关”,要么开,要么关;而计数信号量则能控制更多的进程进入临界区,控制进程的数量。
还有一个很有意思的东西叫“互斥锁”。
就好比家里那扇门,只有一个人能进去,大家得排队。
这个锁一旦被某个进程拿走,其他的进程就只能在外面干等着,直到这个进程放下锁。
这个“锁”能够确保一次只有一个进程进入临界区,免得发生资源争夺,搞得大家都不开心。
你可以想象一下,假如没有锁,大家都想进入那扇门,结果就乱套了。
大家都开始推推搡搡,那锅估计就要掉了,菜也没法做。
三、进程同步与互斥的实际应用可能有些小伙伴会觉得这些术语有点难懂,其实它们的应用离我们生活可不远。
ntp时钟同步算法
NTP是Network Time Protocol(网络时间协议)的缩写。
其主
要用途是实现网络中各节点的时钟同步。
NTP算法的基本思路如下:
1. NTP采用分层的时钟体系来进行时间同步。
其中,位于最顶层的节点称为精确时间源(stratum-0),其下一层节点称为1级节点,
以此类推。
2. 精确时间源一般采用原子钟来获得高精度的时间信息,其他
节点通过向上级节点或直接与精确时间源进行通信来获取时间信息。
3. NTP协议中定义了时钟偏差和时钟漂移量两个概念。
时钟偏差指时钟显示时间与真实时间之间的差异,时钟漂移量指时钟运行速率
与真实时间的差异。
4. NTP采用多种同步算法,包括时间戳比较法、滑动平均法和指数滤波法等。
其中时间戳比较法是最常用的算法之一。
该算法核心是
比较两个节点的时间戳(即发送和接收消息的时间)并计算时钟偏差。
具体做法是将发送方的时间戳发送给接收方,接收方将其与接收消息
时的时间戳进行比较,并计算出时钟偏差。
5. NTP协议中还定义了一系列机制来保证时间同步的准确性和可靠性。
例如,通过选择靠近自己的节点来避免网络延迟,通过剔除异
常节点来提高算法准确性等。
总之,NTP算法通过分层的时钟体系和多种同步算法来实现网络
中各节点的时钟同步。
其设计考虑了时间同步的准确性和可靠性,并
采用多种机制来提高算法的性能和可靠性。
同步方法和同步代码块的区别同步方法和同步代码块都是为了保证多线程程序的线程安全而提供的机制。
它们可以防止多个线程同时访问共享资源,避免出现竞态条件、数据不一致等问题。
下面详细介绍同步方法和同步代码块的区别。
1. 范围:同步方法是对整个方法进行同步,即在方法声明时使用synchronized关键字进行修饰。
同步方法将整个方法的代码块设为同步块,即该方法在被一个线程使用时其他线程必须等待该线程执行完该方法才能继续使用。
因此,同步方法的范围较大,灵活性较低。
同步代码块是对指定的代码块进行同步,即在代码块中使用synchronized关键字进行修饰。
同步代码块可以选择性地对代码块进行同步,在需要保护的关键代码段上加锁,这样其他线程就无法同时访问该代码块。
因此,同步代码块的范围较小,可以灵活地选择需要进行同步的代码块。
2. 粒度:同步方法是对整个方法进行同步,因此其粒度较粗。
当一个线程进入同步方法时,其它调用该方法的线程必须等待该线程执行完该方法才能继续执行。
如果同一个对象中有多个同步方法,那么同一时刻只能有一个线程可以执行任意一个方法,无论这些同步方法是否是独立的。
同步代码块是对指定的代码块进行同步,因此其粒度较细。
可以对需要同步的代码块进行选择性的加锁,不会影响到其他线程访问非同步的代码块。
3. 所属对象:同步方法属于对象级别,即对该方法的调用是针对对象实例进行的,只有一个实例对象的同步方法才会相互影响。
不同的实例对象之间的同步方法互不影响,可以并发执行。
因为每个对象都有一个对应的监视器锁(也称为内置锁),实现对该对象的同步。
同步代码块也属于对象级别,但可以对指定的对象进行同步,只有持有该对象监视器锁的线程才能进入同步代码块。
不同的对象之间的同步代码块互不影响,可以并发执行。
因此,同步代码块更加灵活,可以对不同的对象进行单独的同步操作。
4. 性能:同步方法的性能较低,原因在于它对整个方法进行同步,即使方法内的多个代码块只有一个访问共享资源的代码块,其他代码块也会被同步机制阻塞。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。