2.4 转动关节和移动关节
- 格式:ppt
- 大小:3.05 MB
- 文档页数:45

关节运动的基本形式
机器人关节运动分为四种基本形式:
1.直线运动:机器人负责轴向和纵向运动,将机器人发射器从一个位置移动到另一个位置,实现任务要求的特定位置。
2.旋转运动:机器人检测物体位置、旋转和移动,以及进行有关操作时,机器人臂要进行定向旋转。
3.夹紧运动:机器人对物体进行各种成型或者组装时,需要向物体施加可控的力,以实现紧固、拧紧等操作。
4.组合运动:有时候,机器人运动不能局限于单一的线性运动,需要利用各关节之间的组合运动,来达到任务要求的位置和旋转角度。

六轴机器人各关节运动副形式六轴机器人是一种具有六个自由度的机器人,可以在三维空间内进行高精度的运动控制,广泛应用于工业生产线、医疗设备、航空航天等领域。
其中,六轴机器人的关节运动副形式是其核心部分之一,下面将详细介绍六轴机器人各关节运动副形式。
一、旋转关节旋转关节是最简单的一种关节形式,其结构类似于普通的转轴。
旋转关节可以使机器人在一个平面内进行旋转运动,并且可以通过不同角度的组合实现全方位的运动控制。
旋转关节主要由电机、减速器和输出轴组成,其中电机提供驱动力,减速器起到降低速度和增加扭矩的作用,输出轴则将旋转运动传递给下一个关节或末端执行器。
二、直线关节直线关节可以使机器人在一个直线上进行直线运动。
其结构类似于滑块和导轨组合而成。
直线关节主要由电机、减速器和导轨组成,其中电机提供驱动力,减速器起到降低速度和增加扭矩的作用,导轨则将直线运动传递给下一个关节或末端执行器。
直线关节通常用于需要进行精确位置控制的场合,例如组装、焊接等。
三、旋转-旋转关节旋转-旋转关节可以使机器人在两个平面内进行旋转运动。
其结构类似于两个旋转关节组合而成。
旋转-旋转关节主要由电机、减速器和输出轴组成,其中电机提供驱动力,减速器起到降低速度和增加扭矩的作用,输出轴则将旋转运动传递给下一个关节或末端执行器。
四、旋转-直线关节旋转-直线关节可以使机器人在一个平面内进行旋转运动,并且可以在垂直于该平面的方向上进行直线运动。
其结构类似于一个旋转关节和一个直线关节组合而成。
旋转-直线关节主要由电机、减速器、输出轴和导轨组成,其中电机提供驱动力,减速器起到降低速度和增加扭矩的作用,输出轴将旋转运动传递给导轨,在垂直方向上实现直线运动。
五、直线-旋转关节直线-旋转关节可以使机器人在一个直线上进行直线运动,并且可以在垂直于该直线的方向上进行旋转运动。
其结构类似于一个直线关节和一个旋转关节组合而成。
直线-旋转关节主要由电机、减速器、导轨和输出轴组成,其中电机提供驱动力,减速器起到降低速度和增加扭矩的作用,导轨将直线运动传递给输出轴,在垂直方向上实现旋转运动。
习 题0.1 简述工业机器人的定义,说明机器人的主要特征。
0.2 工业机器人与数控机床有什么区别?0.3 工业机器人与外界环境有什么关系?0.4 说明工业机器人的基本组成及三大部分之间的关系。
0.5 简述下面几个术语的含义:自由度、重复定位精度、工作原理、工作速度、承载能力。
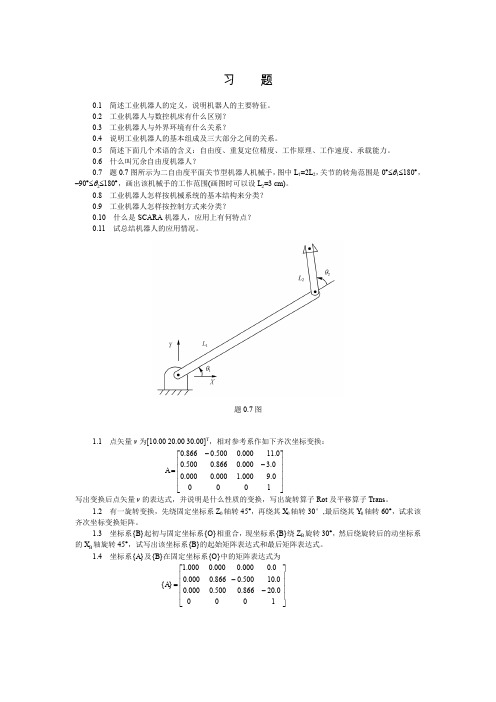
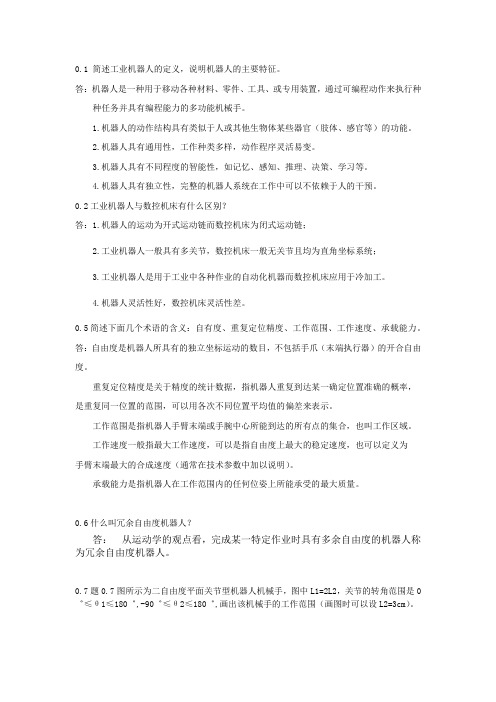
0.6 什么叫冗余自由度机器人?0.7 题0.7图所示为二自由度平面关节型机器人机械手,图中L 1=2L 2,关节的转角范围是0︒≤θ1≤180︒,–90︒≤θ2≤180︒,画出该机械手的工作范围(画图时可以设L 2=3 cm)。
0.8 工业机器人怎样按机械系统的基本结构来分类? 0.9 工业机器人怎样按控制方式来分类? 0.10 什么是SCARA 机器人,应用上有何特点? 0.11 试总结机器人的应用情况。
题0.7图1.1 点矢量v 为[10.00 20.00 30.00]T ,相对参考系作如下齐次坐标变换:0.866 0.500 0.000 11.00.500 0.866 0.000 3.00.000 0.000 1.000 9.0 0 0 0 1 -⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦A 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
1.2 有一旋转变换,先绕固定坐标系Z 0轴转45°,再绕其X 0轴转30°,最后绕其Y 0轴转60°,试求该齐次坐标变换矩阵。
1.3 坐标系{B }起初与固定坐标系{O }相重合,现坐标系{B }绕Z B 旋转30°,然后绕旋转后的动坐标系的X B 轴旋转45°,试写出该坐标系{B }的起始矩阵表达式和最后矩阵表达式。
1.4 坐标系{A }及{B }在固定坐标系{O }中的矩阵表达式为1.000 0.000 0.000 0.00.000 0.866 0.500 10.0 {}0.000 0.500 0.866 20.0 0 0 0 1 ⎡⎤⎢⎥-⎢⎥=⎢⎥-⎢⎥⎣⎦A0.866 0.500 0.000 3.00.433 0.750 0.500 3.0{}0.250 0.433 0.866 3.0 0 0 0 1--⎡⎤⎢⎥--⎢⎥=⎢⎥⎢⎥⎣⎦B画出它们在{O }坐标系中的位置和姿态:1.5 写出齐次变换矩阵H AB ,它表示坐标系{B }连续相对固定坐标系{A }作以下变换: (1) 绕Z A 轴旋转90°。
0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。

题目
转动关节用字母( )表示。
A.P
B.R
C.S
D.T
答案解析
B
机器人的关节分为几种类型?分别用什么字母表示?
1)平动关节(P-prismaticjoint),也称之为移动副,允许连杆作直线移动。
2)转动关节(R-revolutejoint),也称之为转动副,允许连杆作旋转运动。
关节机器人的主要分类
最佳答案
按照关节机器人的构造分类:
1、五轴和六轴关节机器人
拥有五个或六个旋转轴,类似于人类的手臂。
应用领域有装货、卸货、喷漆、表面处理、测试、测量、弧焊、点焊、包装、装配、切屑机床、固定、特种装配操作、锻造、铸造等。
2、托盘关节机器人
二个或四个旋转轴,以及机械抓手的定位锁紧装置。
应用领域有装货、卸货、包装、特种搬运操作、托盘运输等。
3、平面关节机器人SCARA
三个互相平行的旋转轴和一个线性轴。
应用领域有装货、卸货、焊接、包装、固定、涂层、喷漆、粘结、封装、特种搬运操作、装配等。
此外,还可以按照关节机器人的工作性质分类,可分为很多种,比如:搬运机器人,点焊机器人,弧焊机器人,喷漆机器人,激光切割机器人等等。