机械原理平面机构的平衡
- 格式:ppt
- 大小:1.48 MB
- 文档页数:34
第6章 机械的平衡6.1 复习笔记本章主要介绍了刚性转子的静平衡和动平衡计算和平面机构的完全平衡和部分平衡的计算。
学习时需要重点掌握刚性转子的静平衡和动平衡计算(质径积的计算),常以计算题的形式考查,而且几乎每年必考。
除此之外,静(动)平衡条件、完全平衡、部分平衡等内容,常以选择题、填空题和判断题的形式考查,复习时需要把握其具体内容,重点记忆。
一、机械平衡的目的及内容1.机械平衡的目的(1)设法平衡构件的不平衡惯性力,以消除或减小其带来的不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需研究如何合理利用不平衡惯性力。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡(见表6-1-1)表6-1-1 绕固定轴回转的构件的惯性力平衡(2)机构的平衡作平面复合运动或往复移动的构件产生的惯性力无法在构件本身上找到平衡,必须研究整个机构使各运动构件惯性力的合力以及合力偶得到完全的或部分的平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算(见表6-1-2)表6-1-2 刚性转子的平衡计算图6-1-1 刚性转子的平衡计算三、刚性转子的平衡实验1.静平衡实验(见表6-1-3)表6-1-3 静平衡实验2.动平衡实验试验一般需在动平衡机上进行,动平衡机的内容见表6-1-4。
表6-1-4 动平衡机3.现场平衡对于一些大型和高速转子,由于装运、蠕变、电磁场或工作温度等的影响会破坏制造期间的平衡。
若制造期间的平衡遭到破坏,可在现场直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
四、转子的许用不平衡量和许用不平衡度(见表6-1-5)表6-1-5 转子的许用不平衡量和许用不平衡度图6-1-2 许用不平衡量的分配五、平面机构的平衡。
第10章平面机构的平衡一、选择题1.机械运转中,转子动平衡的条件是:回转件各不平衡质量产生的离心惯性力系的()。
[西安交通大学2008研]A.合力等于零B.合力偶矩等于零C.合力和合力偶矩均为零D.合力和合力偶矩均不为零【答案】C2.达到动平衡的回转件()是静平衡。
[浙江大学2006研]A.一定B.不一定C.有可能D.不可能【答案】A3.机构平衡研究的内容是()。
[重庆大学2005研]A.驱动力与阻力间的平衡B.各构件作用力间的平衡C.惯性力系间的平衡D.输入功率与输出功率间的平衡【答案】C4.动平衡的条件是要求离心力系的____________。
[电子科技大学2006研]A.合力偶矩为0B.合力为0C.合力和合力偶矩均为0D.合力为0但合力偶矩不为0【答案】C5.作刚性转子动平衡实验时,平衡面(校正平面)最少应选()[电子科技大学2004研]A.4个B.3个C.2个D.1个【答案】C6.达到静平衡的刚性回转件,其质心()位于回转轴线上。
[东南大学2003研] A.一定B.不一定C.一定不【答案】A7.机械运转中,转子动平衡的条件是:回转件各不平衡质量产生的离心惯性力系的()。
[西安交通大学2007研]A.合力等于零B.合力偶矩等于零C.合力和合力偶矩均为零D.合力和合力偶矩均不为零【答案】C8.当整个机构的惯性力得到平衡后,在机构的()上将检测不到惯性力引起的振动。
[湖南大学2007研]A.机架B.回转构件C.配重D.平面运动构件【答案】A9.刚性回转件动平衡的条件是()。
[山东大学2005研]A.总惯性力之和为零B.总惯性力矩之和为零C.总惯性力和总惯性力矩之和都为零【答案】C10.达到静平衡的刚性回转件,其质心()位于回转轴线上。
[武汉科技大学2009研]A.一定B.一定不C.不一定【答案】A11.刚性转子动平衡的力学条件是()。
[武汉理工大学2005研]A.惯性力系的主矢为零B.惯性力系的主矩为零C.惯性力系的主矢、主矩均为零【答案】C二、填空题1.轴向尺寸较大的回转件,应进行_________平衡,平衡时至少要选择_________个校正平面。
第六章机械的平衡机械平衡的目的是尽可能地消除或减小惯性力对机械的不良影响。
为达到此目的,通常需要做两方面的工作:首先,在机械的设计阶段,对所设计的机械在满足其工作要求的前提下,应在结构上保证其不平衡惯性力最小或为零,即进行平衡设计;其次,经过平衡设计后的机械,由于材质不均、加工及装配误差等因素的影响,生产出来的机械往往达不到设计要求,还会有不平衡现象,此时需要用试验的方法加以平衡,即进行平衡试验。
6.1本章知识点串讲【知识点1】刚性转子的静平衡的原理及计算方法一、静不平衡的定义:对于轴向尺寸较小的盘状转子,如齿轮、凸轮等,它们的质量可近似地认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转线上,当其转动时,偏心质量就会产生离心惯性力。
这种不平衡现象在转子静态时即可表现出来,故称之为静不平衡。
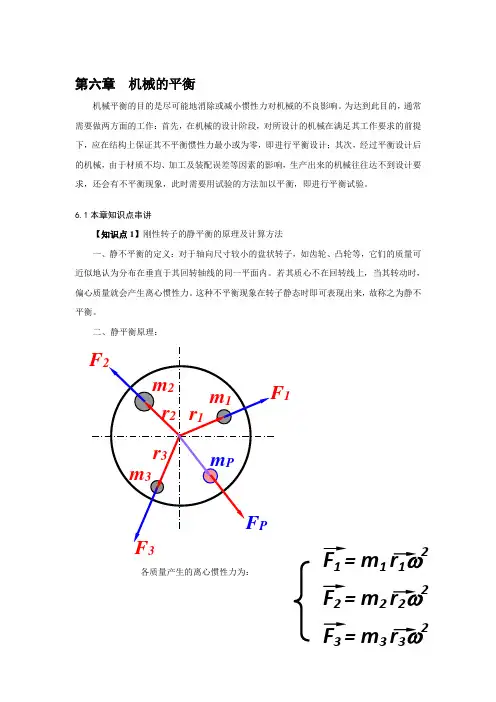
二、静平衡原理:各质量产生的离心惯性力为:13F1 = m1 r1ω2F2 = m2 r2ω2F3 = m3 r3ω2若:F 1+F 2 +F3 ≠ 0——表明此回转体为非平衡回转体。
人为增加一个质量点m P ,该质量点产生一个离心惯性力F P ,F 1+F 2 +F3+F P = 0称对此回转体进行了平衡。
结论:若欲使回转体处于平衡,则各质量点的质径积(或重径积)的矢量和为零。
三、求解方法主要有矢量图解法和坐标轴投影法。
A.矢量图解法其中W i = m i r i ,称为质径积。
用矢量图解法进行求解时,一定要选取合适的比例尺,作图要尽量准确。
平衡条件为:m 1 r 1 + m 2 r 2 + m 3 r 3 + m P r P =0 B.坐标轴投影法【知识点2】刚性转子的动平衡的原理及计算方法一、动不平衡的定义:对于轴向尺寸较大的转子,如内燃机曲轴和机床主轴等,其偏心质量分布在不同的回转平面内。
在这种情况下,即使转子的质心在回转轴线上,由于各偏心质量所产生的离心惯性力不在同一回转平面内,因而将形成惯性力偶,所以仍然是不平衡的。
智慧树知到《机械原理》章节测试答案绪论1、机械是()的总称。
A:机器和机构B:机构和构件C:机器和零件D:机构和零件正确答案:机器和机构2、机器能够完成能量转换。
A:对B:错正确答案:对3、机构能够完成能量转换。
A:对B:错正确答案:错4、机器包含机构。
A:对B:错正确答案:对6、内燃机是用来传递物料的。
A:对B:错正确答案:错7、一台机器是由一个以上的机构组成的。
A:对B:错正确答案:对8、机器和机构都是人为的实物组合。
A:对B:错正确答案:对9、机器和机构都是具有确定运动的。
A:对B:错正确答案:对10、变速箱是机器。
A:对B:错正确答案:错第一章1、机构具有确定运动的条件是()。
A:机构的自由度大于零B:机构的自由度大于零且自由度数等于原动件数C:机构的自由度大于零且自由度数大于原动件数D:机构的自由度大于零且自由度数小于原动件数正确答案:机构的自由度大于零且自由度数等于原动件数2、两构件在几处相配合而构成转动副,在各配合处两构件相对转动的轴线()时,将引入虚约束。
A:交叉B:重合C:垂直D:异面正确答案:重合4、一个平面低副所受的约束数为()。
A:0B:1C:2D:3正确答案:25、仅用简单的线条和规定的符号代表构件和运动副所绘制的简图称为()。
A:机构运动简图B:机构示意图C:运动线图D:机构装配图正确答案:机构示意图6、机构中的构件是由一个或多个零件所组成,这些零件间不能产生相对运动。
A:对B:错正确答案:对7、移动副是()。
A:2级副B:3级副C:4级副D:5级副正确答案:5级副8、构件通过()而构成的可相对运动的系统成为运动链。
A:运动副B:铰链C:零件D:机架正确答案:运动副9、齿轮副是高副。
A:对B:错正确答案:对10、螺旋副是空间运动副。
A:对B:错正确答案:对第二章2、速度瞬心是()为零的重合点。
A:相对速度B:绝对速度C:加速度D:速度正确答案:相对速度3、速度瞬心是()相等的重合点。