单片机定时器CTC模式
- 格式:ppt
- 大小:721.00 KB
- 文档页数:16
51单片机定时器工作方式51单片机是一种非常常见的单片机,它具有多个定时器用来实现各种定时任务。
下面我们就来详细介绍一下51单片机的定时器工作方式。
首先,51单片机的定时器可以分为两种类型:定时/计数器0(T0)和定时/计数器1(T1),它们分别有不同的工作方式和控制寄存器。
一、定时/计数器0(T0)工作方式:定时/计数器0(T0)是一个8位的定时器/计数器,它可以进行定时或计数操作。
在定时模式下,它可以作为定时器在规定的时间段内进行计时;在计数模式下,它可以根据外部信号的脉冲计数。
在定时模式下,T0可以通过设置控制寄存器TCON的位4(TR0)来启动或停止计时操作。
当TR0为1时,定时器开始计时;当TR0为0时,定时器停止计时。
定时器的工作频率可以通过控制寄存器TMOD的位1和位0来设置。
在计数模式下,T0可以通过设置TCON的位5(CT0)来选择定时器或计数器操作。
当CT0为0时,定时器工作,当CT0为1时,计数器工作。
同时,在计数模式下,还需要通过设置控制寄存器TMOD的位1和位0来设置计数器的工作频率。
定时/计数器0还可以使用中断功能,通过设置控制器IE的位4(ET0)来开启或关闭中断。
当ET0为1时,当定时器溢出时会产生中断请求,可以在中断服务程序中处理相应的操作。
二、定时/计数器1(T1)工作方式:定时/计数器1(T1)也是一个8位的定时器/计数器,它可以进行定时或计数操作。
类似于T0,T1也可以在定时模式下作为定时器进行计时,或者在计数模式下根据外部信号的脉冲进行计数。
在定时模式下,T1可以通过设置TCON的位6(TR1)来启动或停止计时操作。
当TR1为1时,定时器开始计时;当TR1为0时,定时器停止计时。
定时器的工作频率可以通过设置TMOD的位3和位2来设置。
在计数模式下,T1可以通过设置TCON的位7(CT1)来选择定时器或计数器操作。
当CT1为0时,定时器工作;当CT1为1时,计数器工作。
单片机技术》作业一、判断题I.当80C51的EA引脚接低电平时,CPU只能访问片外ROM,而不管片内是否有程序存储器。
(V)2•是读端口还是读锁存器是用指令来区别的。
(V)3•特殊功能寄存器可以当作普通的RAM单元来使用。
(X)4.在80C51中,当CPU访问片内、^卜ROM区时用MOVC指令,访问片外RAM区时用MOVX指令,访问片内RAM区时用MOV指令。
(V)5.单片机是将微处理器、一定容量的RAM和ROM以及I/O口、定时器等电路集成在一块芯片上而构成的微型计算机。
(V)6.在80C51的片内RAM区中,位地址和部分字节地址是冲突的。
(X)7.在单片机中,用随机存取的存储器来存储数据,暂存运行期间的数据、中间结果、缓冲和标志位等,所以称之为数据存储器。
(V)8.直接寻址是指在指令中直接给出操作数单元的地址。
(V)9•当80C51的EA引脚接高电平时,CPU只能访问片内的4KB空间。
(X)10.单片机80C51复位后,其PC指针初始化为0000H,使单片机从该地址单元开始执行程序。
(V)II.单片机系统上电后,其内部RAM的值是不确定的。
(V)12.MCS-51指令中,MOVC为ROM传送指令。
(X)二、单项选择题1.MCS-51单片机的堆栈区应建立在(A。
A.片内数据存储区的低128字节单元B.片内数据存储区C.片内数据存储区的高128字节单元D.程序存储区2•如果MCS-51中PSW寄存器的RS1、RSO两位分别为0、1,则工作寄存器R0是指内存中(D单元。
A.00HB.07HC.10HD.08H3.不属于系统总线的是(C)。
A.数据总线B.地址总线C.内部总线D.控制总线4.M0V3FH,#40H,指令执行后(3FH)=(A)。
A.40HB.00HC.3FHD.10H5.指令MOVC,7EH指令采用的寻址方式是(A)。
A.位寻址B.立即寻址C.直接寻址D.相对寻址6.8051单片机程序存储器的容量最大可扩展为(B)。
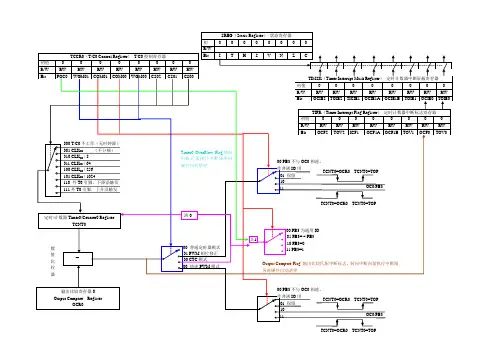
CTC:比较匹配时清零计数器模式,。
当计数器TCNT0的数值等于比较寄存器OCR0时计数器TCNT0自动清零。
OCR0定义了计数器的最大(TOP)值,这个模式使得用户可以很容易地控制比较匹配输出的频率。
T/C0的比较输出脚为OC0(PB3),PB口的第三脚,在此模式下可以在OC0上输出PWM控制外部设备。
例如:在OC0脚上输出20HZ的方波信号,方波的周期时间为T=1/20HZ=0.05秒=50ms,半个周期为25ms,系统采用8MHZ晶振,1024分频,时钟计数频率为8000000/1024=7812.5HZ,每个时钟脉冲时间为1/7812.5=0.128ms,定时25ms的计数值为25ms/0.128ms=195,将195赋值为T/C0的比较寄存器OCR0,启动定时器后,TCNT0从0开始计数,当计数到195时,产生比较中断,在OC0脚上输出20HZ的占空比为50%的方波信号。
操作过程如下:一、I/O管脚初始化:PB3(OC0)脚设为输出,DDRB|=(1<<PB3);二、使能全局中断:SREG=0X80;三、T/C0比较中断允许:TIMSK|=(1<<OCIE0);四、TCCR0配置:分频系数为1024,TCCR0|=(1<<CS02)|(0<<CS01)|(1<<CS00);CTC模式设置, TCCR0|=(1<<WGM01)|(0<<WGM00);比较匹配时OC0取反 TCCR0|=(1<<COM01)|(0<<COM00);五、计数器付初值:TCNT0=0;OCR0=195; //付初值后定时器开始工作//函数功能:在PB3上输出20HZ的方波,并在PD7上产生周期2秒的周期信号。
(代码来自轻松玩转avr单片机c语言cd)#include <iom16v.h>char Counter = 0; // 计数变量清零/********端口初始化********/void port_init(){DDRB|=(1<<PB3); //PB3配置为输出(为1时用或符号|)PORTB&=(0<<PB3); //PB3输出0(为0时与符号&)DDRD|=(1<<PD7); //PB3配置为输出(为1时用或符号|)PORTD&=(0<<PD7); //PB3输出0(为0时与符号&)}/********定时器0初始化********/void timer0_init(){SREG = 0x80; //使能全局中断TIMSK= (1<< OCIE0); //T/C0比较匹配中断允许TCCR0=(1<<COM00)|(0<<COM01)|(0<<WGM00)|(1<<WGM01)|(1<<CS02)|(0<<CS01)|(1<<CS00);// T/C0工作于CTC模式,1024分频,比较匹配时,触发OC0取反TCNT0 = 0; //定时初值设置,OCR0 = 195; //比较匹配寄存器初值}/********主函数********/void main(){port_init();timer0_init();while(1);}/********定时器0比较匹配中断服务函数********/#pragma interrupt_handler timer0_COMP:20void timer0_COMP(void){TCNT0 = 0; //定时初值设置,OCR0 = 195; //比较匹配寄存器初值if(++Counter >= 40) //定时时间到1S吗?定时中断溢出40次为1S {PORTD^=(1<<PD7);//驱动蜂鸣器发声Counter = 0; //1S计时变量清零}}小企鹅diy 科学探究学习网更多文章转到/wqb_lmkj/blog文章分类单片机。
单片机的定时器模式
单片机的定时器模式有以下几种:
1. 定时/计数模式(T/C mode):定时器用作定时器或者计数器,在设定时间或者计数到设定值后触发中断或者输出信号。
2. 输入捕获模式(Input Capture mode):定时器用于测量输入信号的脉冲宽度或者周期,在每次捕获到输入信号时记录定时器的值。
3. 输出比较模式(Output Compare mode):定时器用于与某个参考值进行比较,当定时器的值与参考值相等时,可以触发中断或者产生输出信号。
4. 脉冲宽度调制模式(PWM mode):定时器通过改变输出信号的占空比来生成脉冲宽度可调的方波,用于控制电机速度、LED亮度等应用。
5. 脉冲计数模式(Pulse Count mode):定时器用于计数输入信号的脉冲个数,在达到设定的脉冲数后触发中断或者产生输出信号。
这些定时器模式可以根据单片机的型号和品牌的不同而略有差异,具体的定时器模式可以参考单片机的技术手册或者开发工具的相关文档。
AVR单片机复习题(答案在后面)第一章填空:1.单片机的基本组成结构包括:、、、五大部分。
2.哈佛结构是指,计算机由五大部分构成,五大部分分别是:、、、3.ATmega16包含程序存储器,数据存储器和的EEPROM。
4.ATMEL公司生产的单片机以三大系列为主,分别是:、、5.ATMEL公司生产的TinyAVR是属于单片机。
、6.ATMEL公司生产的megaA VR是属于单片机。
7.ATMEL公司生产的XMEGA是属于单片机。
选择:1.ATMEL公司生产的单片机以三大系列为主,其中TinyAVR是属于()A、低档单片机B、中档单片机C、高档单片机D、普通单片机2.ATMEL公司生产的单片机以三大系列为主,其中megaA VR是属于()A、低档单片机B、中档单片机C、高档单片机D、普通单片机3.ATMEL公司生产的单片机以三大系列为主,其中XMEGA是属于()A、低档单片机B、中档单片机C、高档单片机D、普通单片机4. 单片机的基本组成结构包括:CPU、程序存储器、、输入接口、输出接口五大部分()A、EEPROMB、数据存储器C、ROMD、堆栈简答:1.什么是ISP技术?采用ISP技术的单片机有什么优点?2.什么是单片机?3.说明单片机的RAM、FLASH ROM、EEPROM的用途和特点?(中等)第二章填空:1.单片机的三总线结构是指:、、。
2.ATmega16包含FLASH ROM,RAM和的EEPROM。
3.FLASH ROM支持用户,可以实现的(填读写或写入)。
4.单片机的数据存储器包含和两大部分,其中是的补充。
5.ATmega16中含有的EEPROM。
它的擦写次数是,具有、。
6.ATmega16的DIP封装共有引脚,其中共有I/O 口线。
7.ATmega16的数据存储器中共有通用工作寄存器,有寄存器可以合并成为3个16位的寄存器。
8.在ATmega16的通用寄存器组中,有16位的寄存器。
单片机常用c代码在单片机领域,C语言是最常用的编程语言之一。
它具有简单易学、灵活高效的特点,被广泛应用于单片机系统的开发中。
本文将介绍一些常用的单片机C代码,为读者提供参考和学习的资源。
一、IO口控制单片机的IO口是与外部设备连接的重要接口,通过控制IO口的高低电平来实现与外部设备的通信。
以下是常见的IO口控制代码示例:1. 设置IO口为输出模式:```c#define LED_PIN 0 // 指定IO口引脚号void setup() {pinMode(LED_PIN, OUTPUT); // 设置IO口为输出模式}void loop() {digitalWrite(LED_PIN, HIGH); // 设置IO口为高电平delay(1000); // 延迟1秒digitalWrite(LED_PIN, LOW); // 设置IO口为低电平delay(1000); // 延迟1秒```2. 设置IO口为输入模式:```c#define BUTTON_PIN 1 // 指定IO口引脚号void setup() {pinMode(BUTTON_PIN, INPUT); // 设置IO口为输入模式}void loop() {if (digitalRead(BUTTON_PIN) == HIGH) { // 判断IO口电平是否为高电平// 执行相应操作}}```二、定时器控制定时器是单片机中的重要组件,可用于实现精确的时间控制和周期性任务。
以下是常见的定时器控制代码示例:1. 设置定时器计数器和预分频值:void setup() {TCCR1B = (1 << CS12) | (1 << CS10); // 设置定时器1的预分频为1024}void loop() {// 执行相应操作}```2. 设置定时器中断服务程序:```cISR(TIMER1_COMPA_vect) {// 定时器1比较匹配中断服务程序}void setup() {TCCR1B = (1 << WGM12) | (1 << CS12) | (1 << CS10); // 设置定时器1的CTC模式和预分频为1024OCR1A = 15624; // 设置定时器1的比较匹配值,实现1秒中断一次TIMSK1 = (1 << OCIE1A); // 允许定时器1比较匹配中断}void loop() {// 执行相应操作}```三、串口通信串口通信是单片机与计算机或其他外部设备进行数据交互的常用方式。
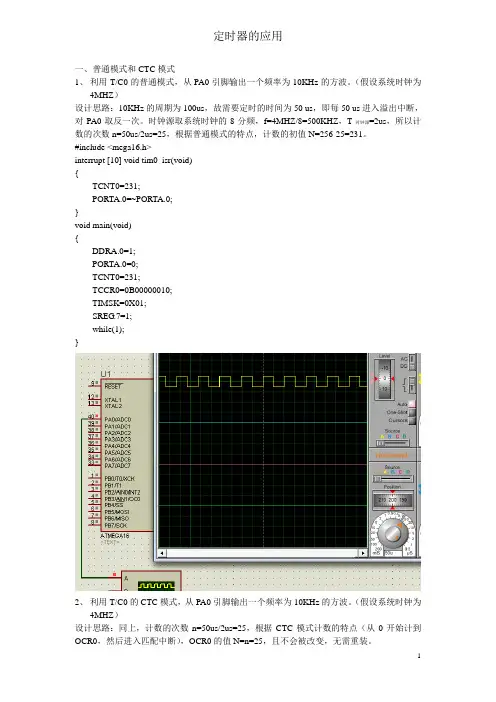
定时器的应用一、普通模式和CTC模式1、利用T/C0的普通模式,从PA0引脚输出一个频率为10KHz的方波。
(假设系统时钟为4MHZ)设计思路:10KHz的周期为100us,故需要定时的时间为50 us,即每50 us进入溢出中断,对PA0取反一次。
时钟源取系统时钟的8分频,f=4MHZ/8=500KHZ,T时钟源=2us,所以计数的次数n=50us/2us=25,根据普通模式的特点,计数的初值N=256-25=231。
#include <mega16.h>interrupt [10] void tim0_isr(void){TCNT0=231;PORTA.0=~PORTA.0;}void main(void){DDRA.0=1;PORTA.0=0;TCNT0=231;TCCR0=0B00000010;TIMSK=0X01;SREG.7=1;while(1);}2、利用T/C0的CTC模式,从PA0引脚输出一个频率为10KHz的方波。
(假设系统时钟为4MHZ)设计思路:同上,计数的次数n=50us/2us=25,根据CTC模式计数的特点(从0开始计到OCR0,然后进入匹配中断),OCR0的值N=n=25,且不会被改变,无需重装。
#include <mega16.h>interrupt [20] void tim0_isr(void){PORTA.0=~PORTA.0; //OCR0的值没必要重装}void main(void){DDRA.0=1;PORTA.0=0;OCR0=25;TCCR0=0B00001010;TIMSK=0X02;SREG.7=1;while(1);}3、利用T/C0的CTC模式,从OC0引脚输出一个频率为10KHz的方波。
(假设系统时钟为4MHZ)设计思路:根据CTC的特点和题意,得:f OC0=f clki/o/(2N(1+0CR0))=4M/(2N(1+OCR0))=10K,取N=1,OCR0=199。
AVR定时器1的CTC模式设置
在CTC模式编程的时候,要执行的步骤如下:
1. 将PD4~PD5 设置为输出(默认为低电平)。
DDRD|=BIT(4)|BIT(5);
2. 决定比较输出模式,试验中为模式电平取反。
TCCR1A=0x50;
3. 决定方波产生模式位,试验中是模式4, 亦即
WGM12=1。
TCCR1B|=BIT(3);
4. 决定分频N,这里就假设去1 吧,无预分频。
TCCR1B|=BIT(0);
5. 在步骤3 中,方波产生模式位为4,换句话说就是OCR1A 决定匹配的最大值。
CTC模式实际上就是比较输出模式,输出占空比相同的脉冲频率=时钟晶振/2N(1+OCRnA)
如:四个指令就可以配置好CTC模式(8M,输出2KHz): DDRD|=0X30;
TCCR1A=0X50;
TCCR1B=0X09;
OCR1A=1999;
#include ;
#include ;
void main()
{
DDRD|=0X30; //set PD4 and PD5 iS out
TCCR1A=0X50; //开启OC1A OC1B
TCCR1B=0X09; //配合TCCR1A,设置OC1A和OC1B为CTC 模式,CTC时钟源选择系统8M时钟
OCR1A=999; //设置OC1A的输出频率为4KHZ
OCR1B=59999; //设置OC1B的输出频率为200/3Hz
}。
ATmega16单片机的使用——实验一 Atmega16定时器T/C0实现按键扫描——实验二 ATmega16单片机的ADC使用举例指导老师:黄刚班级:0720222姓名:李锋锐学号:28试验《一》 Atmega16定时器T/C0实现按键扫描(一)实验目的:用ATmega16实现同时对两个按键定时扫描,要求扫描周期为10MS ,当AJ1按下,LED2点亮,并且BELL 蜂鸣声,当AJ1松开,LED2熄灭,BELL 不响;当AJ2按下,LED3点亮,并且BELL 发出蜂鸣声,当AJ2松开,LED3熄灭,BELL 不响。
(二)实验原理(硬件设计):如图5-37所示,端口PD.3、PD.4为输入端,分别接AJ1和AJ2;端口PD.6、PD.7为输出模式,分别接LED2和LED3;端口PA.4为输出,通过三极管T1来控制蜂鸣器。
图5-36 基于Atmega16单片机定时器的按键扫描电路图(三)实验原理(软件设计):选用外部7.3728MHz 的晶振为系统时钟,按键扫描间隔定位10ms ,定时器T/C0采用CTC 模式,T/C0时钟选择1024分频后的系统时钟,并启用中断。
利用CTC 模式的工作原理,OCR0应赋的值由以下方程确定:361010)10(1024103728.71-⨯=+⨯⨯⨯OCR 于是:)(即0x47710=OCR 。
允许比较匹配中断,在中断程序里做标志位设置,判断标志位满足条件时,程序再读取键盘的状态,确定有无键按下以及按下键的具体操作。
程序如下:(1) L5-6.c#include<iom16.h> #include"key.h"#define Led2 PORTD_Bit6//定义led2 #define Led3 PORTD_Bit7//定义led3 #define Bell PORTA_Bit4//定义bell unsigned char flag=0;void port_init(void);void timer0_init(void);//************************主程序****************************//void main(void){port_init();timer0_init();SREG_Bit7=1;//使能全局中断TCCR0=0x0D;// 定时器工作模式为CTC模式,定时器时钟源来自预分频器的1024分频 while(1){if(flag==1){flag=0;switch(read_key()){case 0:Led2 =1; // Led2灯不亮Led3=1; //Led3灯不亮Bell =0; //蜂鸣器不响break;case 1:Led2 =0; //led2灯亮Led3=1; //Led3灯不亮Bell =1; //蜂鸣器响break;case 2:Led2 =1; //led2灯不亮Led3=0; //Led3灯亮Bell =1; //蜂鸣器响break;}}}}//*******************端口初始化程序*****************************//void port_init(void){DDRD=0xc0;PORTD=0x18;//PD.3( AJ1 )和PD.4( AJ12)方向输入,上拉有效,PD.6(Led2)和//PD.7(Led3)方向输出DDRA=0x10;PORTA=0x00;//PA.4(Bell)方向输出}//******************定时器寄存器初始化程序*(***********************//void timer0_init(void){TCCR0=0x00;TCNT0=0x00;OCR0=0x47; //7.3728MHz的系统时钟(OCR0=0X48)10msTIMSK=0x02; //TC0比较匹配中断使能}//******************定时器0比较匹配中断服务程序***********************// #pragma vector=TIMER0_COMP_vect__interrupt void TIMER0_COMP_isr(void){SREG_Bit7=0;//关闭全局中断flag=1; //标志位置位SREG_Bit7=1; //打开全局中断}(2) key.h#include<iom16.h>#define AJ1 PIND_Bit3//定义按键1#define AJ2 PIND_Bit4//定义按键2unsigned char read_key(){static unsigned char key_state=0;unsigned char key_return=0;switch((key_state)){case 0:if(!AJ1||!AJ2){key_state=1;}break;case 1:if(!AJ1||!AJ2){switch((PIND&0x18)){case 0x10://AJ1按下,返回1key_return=1;break;case 0x08://AJ2按下,返回2key_return=2;break;}key_state=2;}else{key_state=0;}break;case 2:if(AJ1&&AJ2){key_state=0;}if(!AJ1){key_return=1;}if(!AJ2){key_return=2;}break;default: break;}return ( key_return);}四、实验结果:ATmega16可实现同时对两个按键定时扫描,扫描周期为10MS,当AJ1按下,LED2点亮,并且BELL蜂鸣声,当AJ1松开,LED2熄灭,BELL不响;当AJ2按下,LED3点亮,并且BELL发出蜂鸣声,当AJ2松开,LED3熄灭,BELL不响。
一、普通模式
1、根据需要选择时钟源(寄存器TCCR1B)。
2、根据定时时间和时钟源确定定时的初值(寄存器TCNT1H和TCNT1L)。
3、设置中断使能位。
4、选择中断号,编写中断服务程序,注意在中断服务函数里面需要重新设
定定时器初值。
5、初值的计算:分频数计数初值=2^定时器位数-晶振频率/分频数*T(单位
秒)
列:65535-4000000/256*1(定时1秒,256分频,晶振4M)
二、CTC模式
1、如果输出波形,设置端口为输出。
2、设置波形发生模式及时钟源(TCCR1B)。
3、设置输出模式(TCCR1A)。
4、根据需要设置上限值(OCR1A)。
5、频率计算公式:foc n=fclk_io/(2*N*(1+OCRnA))
三、PWM模式
1、设置端口输出
2、设置PWM波形模式及时钟选择(TCCR1A、TCCR1B)。
3、设置PWM波形的频率(OCR1A)。
4、设置PWM波形的占空比(OCR1B)。
5、频率计算公式:foc n=fclk_io/N*(1+TOP)。
PROTEUS仿真学习ATmega16定时器T0PROTEUS软件是仿真软件,在单片机学习中起到事半功倍的作用。
应用该软件掌握ATmega16定时器/计数器TC0资源,效果显著。
单片机的资源管理及控制,均是由寄存器完成的,因此我们在学习时就重视寄存器的强大功能。
ATmega16定时器T0也不例外,它是8位的定时器,我们先来认识它的一些寄存用的,可见其强大威力。
这四大功能也就是它的四个工作模式:分别是普通定时模式;相位可调PWM模式;CTC模式;快速PWM模式。
下表列出四种工作模式功能说明。
(注:匹配:TCNT0值=OCR0值;普通模式和MCS-51使用相似,这里不介绍,在PROTEUS仿真学习ATmega16一:相位可调PWM模式仿真1、说明:采用此模式,可用如下四步曲进行设置,①、WGM0[1:0]=01;COM0[1:0]=10;CS0[2:0]=100。
语句:TCCR0|=(1<<WGM00)|(1<<COM01) |(1<<CS02)实现设置,时钟采用256分频,相位可调PWM模式,升序匹配PB3/OC0清零,降序匹配PB3/OC0置位,并启动定时器T0。
②、设置TCNT0与OC0初值,语句TCNT0=0X00,OC0=100完成设置,表示高低电平占空比为100:156,③、设置端口为输出,开总中断,语句DDRB=0X08,PORTB=0X08,RSEG=0X80。
在PB3/OC0脚上产生如下波形:④、需要改变占空比改变的话,可以通过改变OCR0中值达到要求。
TCNT0计数值达到0X00时会产生溢出中断,设置中断服务程序可以更改OCR0中值,当TCNT0达到0XFF 时更新OCR0中值。
2、PROTEUS 仿真。
简易仿真图配备仿真程序段如下:完成上述功能设置。
源程序在ICC A VR 中编译成功后,生成的HEX 文件装入A Tmega16后,即可在虚拟示波器中显示出PB3/OC0脚上的波形了。
avr单片机实现日历时间差计算要实现日历时间差的计算,您可以使用avr单片机的定时器功能来记录起始时间和结束时间,然后通过计算得出时间差。
以下是一个简单的示例代码,可以在avr单片机上实现日历时间差的计算:```c#include <avr/io.h>#include <avr/interrupt.h>volatile uint32_t start_time, end_time;// 定时器初始化函数void timer_init() {// 使用CTC模式,计数器清零时产生比较中断TCCR1B |= (1 << WGM12);// 设置预分频系数为256TCCR1B |= (1 << CS12);// 设置比较值为62500,产生1秒的定时中断OCR1A = 62500;// 开启比较A中断TIMSK1 |= (1 << OCIE1A);// 开启全局中断sei();}// 比较A中断服务函数ISR(TIMER1_COMPA_vect) {// 递增时间戳start_time++;}// 获取当前时间戳uint32_t get_current_time() {uint32_t current_time;// 关闭定时器中断cli();// 获取当前时间戳current_time = start_time;// 开启定时器中断sei();return current_time;}int main() {// 初始化定时器timer_init();// 设置起始时间start_time = 0;// 假设延时一段时间后,获取结束时间_delay_ms(5000);end_time = get_current_time();// 计算时间差uint32_t time_diff = end_time - start_time;// 将时间差转换为日、时、分、秒等形式uint32_t days = time_diff / 86400;uint32_t hours = (time_diff % 86400) / 3600;uint32_t minutes = (time_diff % 3600) / 60;uint32_t seconds = time_diff % 60;// 输出时间差// TODO: 根据实际情况选择输出方式,如串口、LCD等while (1) {// 程序主循环}return 0;}```上述代码中,使用avr单片机的定时器1来计时,每1秒产生一次比较中断。
arduino一定时间内脉冲个数Arduino是一种典型的单片机板,由于其开源的硬件和软件,方便的开发环境和广泛的应用基础,越来越多的人开始使用Arduino进行各种项目的制作。
其中,Arduino的定时器是一个非常重要的功能,它可以实现许多功能,比如脉冲个数的计数。
脉冲个数在很多场景下是非常重要的一个指标,比如在医疗领域、物理实验中,都需要测量时间内的脉冲个数。
Arduino可以通过使用外部中断和定时器,来实现精准地计数脉冲个数,并将结果输出到串口或者其他设备上。
下面,我们将详细介绍如何实现Arduino一定时间内脉冲个数的计数功能。
第一步,硬件接线首先,我们需要将脉冲信号输入到Arduino板上。
在这里,我们使用Arduino 板自带的中断引脚(digital pin 2或者3)作为接收脉冲信号的引脚。
同时,我们利用Arduino板上的一个定时器(Timer1)来测量时间的长度。
定时器的时钟源我们选择使用Arduino内部的时钟源(16MHz)。
接下来,我们需要将脉冲信号通过一个电阻分压电路降压,并连接到中断引脚(digital pin 2或者3)上。
需要注意的是,接线时需要注意电阻的阻值和数量,以及电阻和Arduino的地线是否连接良好。
第二步,编写代码接下来,我们需要编写Arduino的代码实现脉冲计数功能。
在使用定时器计数时,我们需要实现两个功能:1. 定时器的初始化和配置2. 中断服务函数的编写在定时器初始化和配置方面,我们需要配置Arduino使用定时器1(Timer1)作为计数器,同时设置定时器的时钟源、计数值和预分频器等参数。
在中断服务函数的编写方面,我们需要使用Arduino的外部中断函数来响应脉冲信号的变化,实现精准计数功能。
具体代码如下:/*计时器常数设置*/const float timeInterval = 1000 ;const int counterMax = round(timeInterval * (16000000 / 256));/*变量和引脚初始化*/volatile int counter = 0;volatile int interruptFlag = 0;const int interruptPin = 2; 设置为2号引脚/*计时器初始化,每256个时钟才递增1*/ void Timer1_Init() {cli();TCCR1A = 0;TCCR1B = 0;TCNT1 = 0;OCR1A = counterMax; 预设计数值TCCR1B = (1 << WGM12); 开启CTC模式TCCR1B = (1 << CS12); 预分频256 TIMSK1 = (1 << OCIE1A); 开启中断sei();}/*中断服务函数*/ISR(TIMER1_COMPA_vect) {interruptFlag = 1;}/*外部中断服务函数*/void InterruptHandler() {counter++;}/*主循环*/void loop() {if (interruptFlag) {interruptFlag = 0;Serial.println(counter);counter = 0;}}/*主程序的入口*/void setup() {pinMode(interruptPin, INPUT);attachInterrupt(digitalPinToInterrupt(interruptPin), InterruptHandler, RISING);Timer1_Init();Serial.begin(9600);}在本代码中,我们首先设置了计时器的常数。
A VR单片机定时器使用总结T0一、普通模式:普通模式(WGM01:0 = 0) 为最简单的工作模式。
在此模式下计数器不停地累加。
计到8比特的最大值后(TOP = 0xFF),由于数值溢出计数器简单地返回到最小值0x00 重新开始。
在TCNT0 为零的同一个定时器时钟里T/C 溢出标志TOV0 置位。
此时TOV0 有点象第9 位,只是只能置位,不会清零。
但由于定时器中断服务程序能够自动清零TOV0,因此可以通过软件提高定时器的分辨率。
在普通模式下没有什么需要特殊考虑的,用户可以随时写入新的计数器数值。
输出比较单元可以用来产生中断。
但是不推荐在普通模式下利用输出比较来产生波形,因为这会占用太多的CPU 时间。
TCCR0:`该模式一般用来定时中断。
使用步骤:1、计算确定TCNT0初值;2、设工作方式,置初值;3、开中断;二、CTC( 比较匹配时清零定时器)模式在CTC 模式(WGM01:0 = 2) 下OCR0 寄存器用于调节计数器的分辨率。
当计数器的数值TCNT0等于OCR0时计数器清零。
OCR0定义了计数TOP值,亦即计数器的分辨率。
这个模式使得用户可以很容易地控制比较匹配输出的频率,也简化了外部事件计数的操作。
CTC模式的时序图为Figure 31。
计数器数值TCNT0一直累加到TCNT0与OCR0匹配,然后TCNT0 清零。
利用OCF0 标志可以在计数器数值达到TOP 时产生中断。
在中断服务程序里可以更新TOP的数值。
由于CTC模式没有双缓冲功能,在计数器以无预分频器或很低的预分频器工作的时候将TOP 更改为接近BOTTOM 的数值时要小心。
如果写入的OCR0 数值小于当前TCNT0 的数值,计数器将丢失一次比较匹配。
在下一次比较匹配发生之前,计数器不得不先计数到最大值0xFF,然后再从0x00 开始计数到OCF0。
为了在CTC 模式下得到波形输出,可以设置OC0 在每次比较匹配发生时改变逻辑电平。