FEA建筑实例——钢筋混凝土梁粘结滑移分析 (1)
- 格式:pdf
- 大小:1.28 MB
- 文档页数:23
第七章钢筋与混凝土之间的粘结第七章钢筋与混凝土之间的粘结§ 7.1概述钢筋与混凝土的粘结是钢筋与其周围一定影响范围内混凝土的一种相互作用,它是这两种材料共同工作的前提之一,也是对钢筋混凝土构件的承载力、刚度以及裂缝控制起重要影响的因素之一。
粘结的退化和失效必然导致钢筋混凝土结构力学性能的降低和破坏。
随着有限元法在钢筋混凝土结构非线性中的应用,钢筋与混凝土之间粘结和滑移的研究更显重要。
7.1.1粘结应力及其分类1 •粘结应力的定义粘结应力是指沿钢筋与混凝土接触面上的剪应力。
它并非真正的钢筋表面上某点剪应力值,而是一个名义值(对于变形钢筋而言),是指在某个计算范围(变形钢筋的一个肋的区段)内剪应力的平均值,且对于变形钢筋来说,钢筋的直径本身就是名义值。
2.粘结应力分类•弯曲粘结应力由构件的弯曲引起钢筋与混凝土接触面上的剪应力。
可近似地按材料力学方法求得。
由于在混凝土开裂前,截面上的应力不会太大,所以一般不会引起粘结破坏,对结构构件的力学性能影响不大。
该粘结主要体现混凝土截面开裂前钢筋与混凝土的协同工作机理。
其大小与弯曲粘结应力及截面的剪力分布有关,即对于未开裂截面,弯曲粘结应力的分布规律与剪力分布相同。
•锚固粘结应力钢筋的应力差较大,粘结应力值高,分布变化大,如果锚固不足则会发生滑动,导致构件开裂和承载力下降。
粘结破坏是一种脆性破坏。
•裂缝间粘结应力开裂截面的钢筋应力,通过裂缝两侧的粘结应力部分地向混凝土传递,使未开裂截面的混凝土受拉,也使得混凝土内的钢筋平均应变或总变形小于钢筋单独受力时的相应变形,有利于减小裂缝宽度和增大构件的刚度,此即“受拉刚化效应”。
裂缝间粘结应力属于局部粘结应力范围。
该粘结应力数值的大小反映了受拉区混凝土参与工作的程度。
局部粘结应力应变分布复杂,存在着混凝土的局部裂缝和两者之间的相对滑移,平截面假定不再符合,且影响因素较多,如剪切破坏、塑性铰的转动能力以及结构中的弹塑性分析等。
基于ABAQUS二次开发的钢筋混凝土粘结滑移本构模型研究基于ABAQUS二次开发的钢筋混凝土粘结滑移本构模型研究摘要:钢筋混凝土结构的力学性能主要受到粘结滑移效应的影响。
为了更好地模拟和预测结构的行为,研究者通过对ABAQUS软件进行二次开发,建立了钢筋混凝土粘结滑移本构模型。
本文通过分析该模型,探讨了其应用前景和优势。
1. 引言钢筋混凝土结构是目前建筑中最常用的结构形式之一。
粘结滑移是钢筋与混凝土之间的相互作用,其性能直接影响结构的抗震性能和承载力。
因此,建立准确可靠的粘结滑移本构模型对于结构的力学性能研究具有重要意义。
2. 研究背景传统的ABAQUS软件在模拟钢筋混凝土结构时,常采用弹塑性本构模型。
然而,这种模型难以考虑粘结滑移效应,无法准确模拟结构的真实行为。
为了解决这一问题,研究者对ABAQUS软件进行二次开发,引入了粘结滑移本构模型。
3. 粘结滑移本构模型的原理粘结滑移本构模型是基于Bouc-Wen模型的基础上进行改进的。
该模型考虑了钢筋和混凝土之间的摩擦力和粘滞力,能够较好地描述粘结滑移的非线性行为。
其基本原理是通过相关的物理参数来描述钢筋与混凝土之间的相互作用,以此来确定整个结构的力学性能。
4. 模型参数的确定粘结滑移本构模型有多个参数需要确定。
这些参数包括钢筋粘滞刚度、混凝土粘滞刚度、摩擦系数等。
为了使模型更准确地预测结构的行为,研究者通过试验数据拟合和参数标定等方法来确定这些参数的取值,以满足实际结构的需求。
5. 模型的应用前景通过对粘结滑移本构模型的研究,可以更准确地预测结构的力学性能,提高结构安全性和可靠性。
该模型在地震工程、桥梁工程、水利工程等领域都有广泛的应用前景。
其为工程师提供了一种可靠的分析工具,有助于优化结构设计。
6. 模型的优势与传统的弹塑性模型相比,粘结滑移本构模型具有以下优势:(1)准确模拟钢筋混凝土结构的非线性行为;(2)考虑了钢筋与混凝土之间的相互作用;(3)可用于预测结构的破坏模式和承载力。
型钢混凝土粘结滑移本构关系的分析研究近年来,许多工程项目使用型钢混凝土构件作为结构材料,在结构的安全性和可靠性方面发挥重要作用。
然而,型钢混凝土结构中存在粘结滑移本构关系,这会影响该结构的稳定性。
因此,研究型钢混凝土粘结滑移本构关系是提高结构安全性和可靠性的重要工作。
型钢混凝土结构粘结滑移本构关系的分析研究主要有两种方法:理论分析法和实验法。
理论分析法是以分析可能滑移的模型为基础,对滑移关系的本构参数进行理论分析,以确定滑移特性。
而实验法则是通过实验获取粘结滑移本构关系的参数,从而确定滑移特性。
两种方法有各自的优缺点,需要综合考虑。
针对型钢混凝土粘结滑移本构关系的分析研究,首先需要分析结构模型,以确定滑移的位置和条件。
然后,结合模型的分析结果,考虑结构材料的物理性质,并从物理机械原理出发,建立粘结滑移关系的本构方程,以表达滑移特性。
随后,在实验中,首先在滑移模型上进行粘结材料的实验,以确定粘结滑移本构关系的参数;其次,在确定的条件下,将各种型钢混凝土结构模型放置在实物实验平台上,选择合适的实验方法,进行位移和应力的实验测量,最终获得实验结果。
最后,通过对比理论分析方法和实验测量方法得出的结果,确定型钢混凝土粘结滑移关系的本构参数。
根据以上研究分析,型钢混凝土结构粘结滑移本构关系的分析研究可以采用理论分析法和实验测量法相结合的方法,分析和研究型钢混凝土粘结滑移关系的本构参数,最终实现型钢混凝土结构的安全性
和可靠性。
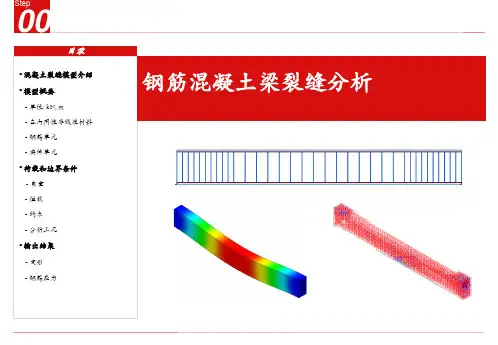
Step00目录钢筋混凝土梁裂缝分析▪混凝土裂缝模型介绍▪模型概要- 单位: kN, m- 各向同性非线性材料- 钢筋单元- 实体单元▪荷载和边界条件- 自重- 恒载- 约束- 分析工况▪输出结果-变形- 钢筋应力•裂缝模型(1)分离式裂缝模型:当应力值达到开裂应力时,混凝土开裂,单元将在节点两侧分离,裂缝成为单元与单元之间的边界。
分析过程需要不断调整单元的网格划分;可以模拟裂缝的开展及计算裂缝的宽度。
多用于分析只有一条或几条关键裂缝的素混凝土或少筋混凝土结构。
132钢筋混凝土梁裂缝分析•裂缝模型(2)弥散式裂缝模型:当应力值达到开裂应力时,则垂直于拉应力的方向生成若干条裂缝。
通过修改材料本构模型来考虑裂缝的影响;无需修改单元网格,易于有限元程序实现,应用广泛。
对正常配筋构件,该裂缝模型结果更接近工程实际。
•裂缝模型(3)断裂力学模型:研究带裂缝构件在各种条件下裂缝的扩展、失稳和断裂规律;主要集中于单个裂缝的应力应变场分布问题;对于裂缝间相互影响问题,研究还不成熟。
•裂缝数值分析方法(1)分解应变模型总应变=材料应变+裂缝应变;材料应变:弹性应变,塑性应变,徐变,热应变;(2)总应变模型不分离各种应变,含裂缝的受拉受压分析中使用同一个本构关系;易于定义非线性特性,易于理解和应用。
钢筋混凝土梁裂缝分析133•总应变模型(1)固定裂缝模型混凝土开裂后,裂缝方向保持不变(2)转动裂缝模型裂缝方向始终保持与主拉应变方向垂直,因而随主拉应变方向变化钢筋混凝土梁裂缝分析 •刚度矩阵(1)开裂前 (2)开裂后⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧xz yz xy z y x 665544333231232221131211xz yz xy z y x D 000000D 000000D 000000D D D 000D D D 000D D D γγγεεετττσσσ)1(2E D D D )21)(1(E D D D )21)(1()1(E D D D c 665544c 231312c 332211υυυυυυυ+===-+===-+-===根据混凝土受拉、受压、受剪本构关系,考虑开裂影响,对刚度矩阵进行更新 134•刚度矩阵(1)切线刚度矩阵根据应力应变曲线,得到切线方向的弹性模量,计算刚度矩阵(2)割线刚度矩阵根据应力应变曲线,得到割线方向的弹性模量,计算刚度矩阵江见鲸《钢筋混凝土结构非线性有限元分析》应力应变关系采用全量形式时,弹性模量应采用割线模量,即采用割线刚度矩阵应力应变关系采用增量形式时,弹性模量应采用切线模量,即采用切线刚度矩阵FEA分析与计算原理切线刚度矩阵:局部裂缝或裂缝扩展分析;割线刚度矩阵:裂缝呈分布状态的钢筋混凝土结构;不考虑各方向泊松比;•混凝土受压本构关系钢筋混凝土梁裂缝分析135•混凝土受拉本构关系G I f: I型断裂能(形成断裂面所需消耗的能量)(1976) A.hillerborg 裂缝尖端应力达到抗拉强度,开始出现裂缝,裂缝张开时,应力并不马上降低为0,而是随着裂缝宽度的增加而降低。
有关钢筋与混凝土之问粘结性能的探究董二卫冯仲齐严峥嵘(西安建筑科技大学,陕西西安710055)喃要]粘结问题是钢筋混凝土结构中的一个重要问题,对这个问题的深入研究,不仅对钢筋的锚固、搭接和细部构造等工程设计问题有实用价值,而且对钢筋混凝土结构的非线性分析、结构抗震分析等也有重要的理论意义。
【关键词]钢筋;混凝土;粘结~滑移;粘结问题1概述近年,伴随我国经济持续高速增长,建筑业作为国民经济支柱产业得到了长足发展。
目前我国建筑主要为钢筋混凝土结构形式,因此随着建筑业的发展,钢筋和混凝土的消耗量也在逐年递增。
在钢筋和混凝土应用过程中,除材料强度外,我们还应该考虑材料延性、裂缝控制等其它性能。
钢筋与混凝土的粘结其实是钢筋与外围混凝土之间一种复杂的相互作用,借助这种作用来传递两者间的应力、协调变形、保证共同工作。
这种作用实质上是钢筋与混凝土接触面上所产生的沿钢筋纵向的剪应力,即所谓粘结应力,有时也简称粘结力。
而粘结强度则是指粘结失效(钢筋被拔出或混凝土被劈裂)时的最大粘结应力。
粘结性能的退化和失效必然导致钢筋混凝土结构力学性能的降低。
2粘结力的组成钢筋和混凝土两种性能不同的材料组成的组合结构之所以能够有效的结合在一起而共同工作,其基本条件是两者之间具有可靠的粘结和锚固,所谓钢筋和混凝土之间的粘结应力指的是两者接触面处的剪应力,它是一种复杂的相互作用。
一般认为这种作用来自三个方面:1)钢筋与混凝土之间的胶结力。
主要是指混凝土中的水泥凝胶体与钢筋表面形成的化学力即为胶结力,其主要与钢筋表面的粗糙程度和水泥的性能有关。
2)钢筋与混凝土之间的摩擦力。
摩擦力是由于混凝土在凝结硬化的过程中产生的对钢筋的握裹挤压作用,我们称此法向力为握裹力。
一般情况下,挤压力越大,接触面积越粗糙,则摩擦力越大。
3)钢筋与混凝土之间的机械咬合力。
机械咬合力对于光面钢筋,主要是由于表面凹凸不平产生的。
对带肋钢筋,主要是由于在钢筋表面突出的横肋之间嵌入混凝土而形成的。
第七章钢筋与混凝土之间的粘结§7.1 概述钢筋与混凝土的粘结是钢筋与其周围一定影响围混凝土的一种相互作用,它是这两种材料共同工作的前提之一,也是对钢筋混凝土构件的承载力、刚度以及裂缝控制起重要影响的因素之一。
粘结的退化和失效必然导致钢筋混凝土结构力学性能的降低和破坏。
随着有限元法在钢筋混凝土结构非线性中的应用,钢筋与混凝土之间粘结和滑移的研究更显重要。
7.1.1 粘结应力及其分类1.粘结应力的定义粘结应力是指沿钢筋与混凝土接触面上的剪应力。
它并非真正的钢筋表面上某点剪应力值,而是一个名义值(对于变形钢筋而言),是指在某个计算围(变形钢筋的一个肋的区段)剪应力的平均值,且对于变形钢筋来说,钢筋的直径本身就是名义值。
2.粘结应力分类·弯曲粘结应力由构件的弯曲引起钢筋与混凝土接触面上的剪应力。
可近似地按材料力学方法求得。
由于在混凝土开裂前,截面上的应力不会太大,所以一般不会引起粘结破坏,对结构构件的力学性能影响不大。
该粘结主要体现混凝土截面开裂前钢筋与混凝土的协同工作机理。
其大小与弯曲粘结应力及截面的剪力分布有关,即对于未开裂截面,弯曲粘结应力的分布规律与剪力分布相同。
·锚固粘结应力钢筋的应力差较大,粘结应力值高,分布变化大,如果锚固不足则会发生滑动,导致构件开裂和承载力下降。
粘结破坏是一种脆性破坏。
·裂缝间粘结应力开裂截面的钢筋应力,通过裂缝两侧的粘结应力部分地向混凝土传递,使未开裂截面的混凝土受拉,也使得混凝土的钢筋平均应变或总变形小于钢筋单独受力时的相应变形,有利于减小裂缝宽度和增大构件的刚度,此即“受拉刚化效应”。
裂缝间粘结应力属于局部粘结应力围。
该粘结应力数值的大小反映了受拉区混凝土参与工作的程度。
局部粘结应力应变分布复杂,存在着混凝土的局部裂缝和两者之间的相对滑移,平截面假定不再符合,且影响因素较多,如剪切破坏、塑性铰的转动能力以及结构中的弹塑性分析等。
型钢混凝土粘结滑移基本理论及应用研究共3篇型钢混凝土粘结滑移基本理论及应用研究1型钢混凝土是一种新型的混凝土结构材料,将型钢和混凝土作为整体,具有钢的强度和刚度,以及混凝土的承载能力和耐久性优点。
型钢混凝土在建筑、桥梁、隧道等领域中应用广泛。
型钢混凝土的粘结滑移性能是其性能的关键之一,因为它涉及到结构的稳定性和耐久性。
1. 型钢混凝土粘结滑移的基本原理型钢混凝土结构的粘结滑移是指混凝土与型钢之间的相互作用,防止起跨度方向的滑动。
这个相互作用包括粘结、摩擦和剪切承载等。
其中,粘结是指混凝土与型钢之间存在一定的粘着力,即粘结力。
这个粘结力的大小与混凝土与型钢之间的接触面积、混凝土和型钢表面的形貌及粘结介质等关系密切。
同时,型钢混凝土结构中也会受到温度、湿度、荷载等各种因素的影响,从而影响混凝土和型钢之间的粘着力。
型钢混凝土结构的滑动摩擦是指型钢和混凝土之间存在一定的摩擦力,从而防止型钢在混凝土中的滑动。
这个摩擦力的大小与型钢表面的粗糙度、型钢与混凝土间的间隙以及型钢和混凝土的物理性质等因素有关。
型钢混凝土结构中的剪切承载是指型钢和混凝土之间的相互作用,在水平剪切力的作用下,阻止型钢从混凝土中剪切和滑动的能力。
混凝土与型钢之间的剪切力大小与混凝土和型钢之间的粘着力和摩擦力有关。
2. 型钢混凝土粘结滑移的应用研究型钢混凝土结构的粘结滑移是其性能的重要指标之一,因此,对其性能的应用研究具有重要的意义。
对于型钢混凝土结构的粘结滑移性能的研究主要包括以下方面:(1)粘结滑移试验。
通过试验方法来进行型钢混凝土结构的粘结滑移性能的测量和分析,确定其相应的参数和指标,并验证理论分析的可靠性。
(2)理论分析。
利用理论分析的方法来研究型钢混凝土的粘结滑移性能,建立相应的数学模型来分析其中各个参数和指标的变化和影响。
(3)工程应用。
根据型钢混凝土结构的粘结滑移性能研究结果,对其在实际工程中的使用进行评估和分析,并提出相应的优化措施和建议,以确保结构的稳定和安全。
考虑粘结滑移的型钢混凝土结构ANSYS模拟方法研究粘结滑移是指在钢筋和混凝土之间存在相互作用力的情况下,钢筋与混凝土之间存在相对滑移的现象。
由于钢筋和混凝土的物理性质不同,导致它们的应力-应变响应也有差异,从而产生滑移。
粘结滑移现象对钢筋混凝土结构的力学性能和变形特性有着重要影响。
本文将探讨粘结滑移的型钢混凝土结构在ANSYS中的模拟方法。
ANSYS是一种常用的有限元分析软件,可以用于进行各种结构的力学性能评估和行为模拟。
在进行粘结滑移的型钢混凝土结构模拟时,需要采用有限元法建立模型,并根据材料的力学性质和粘结滑移的特点进行合理的模拟。
首先,需要对混凝土和钢筋的材料性质进行定义。
混凝土的本构关系可以使用弹塑性本构模型,其中包括弹性的线性部分和塑性的非线性部分。
钢筋可以使用弹性线性模型进行建模。
然后,在有限元模型中定义混凝土和钢筋的材料特性,包括弹性模量、泊松比、屈服强度等。
其次,需要定义粘结滑移的模型。
粘结滑移模型可以采用接触模型或材料模型进行描述。
接触模型可以模拟钢筋与混凝土之间的局部滑移现象,可以通过定义接触刚度和摩擦系数来描述钢筋与混凝土之间的相互作用。
材料模型可以模拟粘结剪应力和滑移之间的关系,可以通过定义剪切刚度和滑移的关系曲线来描述粘结滑移的特性。
然后,进行加载和分析。
可以通过定义荷载和边界条件来模拟实际工况下的型钢混凝土结构。
在加载过程中,可以观察结构的变形和应力分布情况,并分析粘结滑移的发生位置和程度。
最后,对模拟结果进行评估和验证。
可以将模拟结果与实验结果进行比较,以验证模拟方法的准确性和可行性。
如果模拟结果与实验结果吻合良好,则说明该方法可以用于预测型钢混凝土结构在实际荷载作用下的力学性能和变形特性。
总结而言,粘结滑移的型钢混凝土结构在ANSYS中的模拟方法主要包括定义材料性质、建立粘结滑移模型、进行加载和分析以及验证模拟结果。
通过合理的建模和模拟,可以对型钢混凝土结构的力学性能和变形特性进行深入研究,为实际工程设计和实施提供参考依据。
基于ANSYS软件的钢筋砼间粘结滑移分析刘继鹏【摘要】钢筋混凝土是由钢筋和混凝土两种具有不同物理力学性质的材料组合而成的复合材料,其本构模型比较复杂.钢筋与混凝土两者之间的粘结滑移关系,虽然历经近百年的试验研究,对钢筋混凝土机理的认识水平日益深刻,但在有限元分析中还不是很完善.通过选用合适的材料本构模型和粘结滑移模型,建立有限元分析模型,从而进行全过程的模拟分析.%RC is a composite material with rebar and concrete that have different physical mechanics characters, and its constitutive relationship is relatively complex. Although through experimental study in almost a century,it is increasingly understanded in cognition about mechanism of RC,the bond-slip relationship between rebar and concrete has not been deeply studied in finite element analysis. In this paper, through selecting proper material constitutive relationship and bond梥lip model.finite element analysis model is established,and simulate analysis in all process is completed.【期刊名称】《河南科学》【年(卷),期】2012(030)006【总页数】5页(P750-754)【关键词】粘结滑移;分离式模型;弹簧单元;ANSYS【作者】刘继鹏【作者单位】河南工程学院,郑州 451191【正文语种】中文【中图分类】TU852钢筋与混凝土两种材料共同工作使两者具有很好的粘结强度,能承受由于变形差(相对滑移)沿钢筋与混凝土接触面上产生的剪应力,通常把这种剪应力称为粘结应力.研究钢筋混凝土间的粘结锚固,对于了解钢筋混凝土构件或结构的开裂、承载力以及钢筋锈蚀后的承载力具有重要的价值.目前对于静力作用和动力作用下以及钢筋锈蚀后的钢筋与混凝土间的粘结锚固,已进行了大量的试验和理论分析研究.这些传统的分析方法,通过大量的试验方法把试验数据回归统计得到一些经验公式来计算和设计,但是至今仍没有对粘结机理和粘结滑移关系形成共识.随着有限元法和钢筋混凝土力学的发展和计算机水平的提高,目前采用非线性有限元分析钢筋与混凝土之间的本构关系、有限元模型和裂缝处理,已经成为研究的热点.目前钢筋混凝土结构的有限元模型主要有三种:整体式、分离式和组合式[1-3].本课题采用分离式模型,将混凝土和钢筋各自划分成较小的单元,按照混凝土和钢筋不同的力学性能,选择不同的单元形式.对于混凝土材料采用八结点等参单元,考虑到钢筋几何形状相对于混凝土是细长的,可采用三维杆件单元,这样大大减少单元和结点数目,还可以避免钢筋单元划分过细,在钢筋和混凝土的交界面采用过多的过渡单元.为了模拟钢筋与混凝土间的粘结约束和相对滑移,可插入三向弹簧的联结单元.钢筋混凝土之间的粘结锚固问题一般分为筋端锚固和缝间粘结两大类.为了探讨钢筋混凝土的粘结应力与相对滑移的关系,许多学者进行了大量的试验研究和理论分析[1-9].由于钢筋与混凝土之间的粘结作用受混凝土强度、钢筋埋长、混凝土所受的约束等诸多因数的影响,再加上试验手段不同,试验结果有较大差异.国内外目前比较公认的具有代表性的粘结-滑移关系如下:3.1 本构关系3.1.1 混凝土的本构关系3.1.1.1 混凝土单轴受压应力应变关系 ANSYS非线性有限元分析中需要输入混凝土单轴受压应力应变关系,可采用多线性等向强化模型(MISO).本课题采用美国E.Hognestad建议的模型[7]式中:fc为峰值应力(棱柱体极限抗压强度);ε0为相应于峰值应力时的应变,取ε0=0.002;εu为极限压应变,取εu=0.003 8.3.1.1.2 混凝土单轴受拉应力应变关系通常认为混凝土受拉时,应力应变关系基本是线性的,达到极限应力fc以后,强度迅速降低.ANSYS默认的混凝土单轴受拉应力应变模型如图1.3.1.1.3 混凝土多轴应力应变关系和强度准则由于试验手段、加载路径的影响等因素,迄今为止没有较为完整的混凝土多轴应力应变模型,混凝土多轴应力应变关系的理论一直在发展中.ANSYS程序中的混凝土材料模型采用Willam-Warnke (1975)的五参数模型,该模型属于相关流塑性本构关系模型中理想弹塑性本构模型一类.Willam-Warnke的五参数模型表达式为当σm=ρ,τmt=τmc=0,θ=0°~60°,r(σm,θ)=f(rt,rc,θ). Willam-Warnke五参数强度准则的参数由下列条件确定:①弹性摸量EX;②泊松比PRXY;③开裂的剪力传递系数βt;④闭合的剪力传递系数βc;⑤单轴受压强度fc;⑥单轴受拉强度ft;⑦极限双轴抗压强度;⑧周围静水应力状态;⑨静水应力状态下单轴压缩的极限强度;⑩双轴压缩的极限强度;○11断裂发生时刚度因子.在ANSYS程序中,①~⑥参数必须输入,⑦~○1 1参数可以采用默认值.3.1.2 钢筋的本构关系钢筋材料模型采用理想弹塑性模型,在ANSYS程序中可采用双线性随动强化模型(KISO).3.2 单元的选取和划分3.2.1 SOLID65单元采用ANSYS程序提供的专用钢筋混凝土单元SOLID65来模拟混凝土.SOLID65是三维实体单元,有八个结点,每个节点有三个自由度:X、Y、Z方向的平移,单元能够发生塑性变形,可以在三个正交方向开裂和压溃,见图2. 钢筋混凝土单元SOLID65的实常数中可以以体积配箍率的形式输入钢筋的信息,可以按Willam-Warnke的五参数破坏曲面考虑混凝土在三轴受力状态下的开裂和压溃.本文在分析中仅考虑混凝土的开裂,不考虑混凝土的压溃.3.2.2 LINK8单元可用LINK8单元来模拟受压和受拉的钢筋(锚筋).LINK8单元为三维空间实体,有两个结点,每个结点由三个自由度:X、Y、Z方向的平移,承受单轴拉力和压力,不能承受力矩,包含有塑性徐变膨胀应力强化大变形等性能.3.2.3 联结单元如果要考虑钢筋与混凝土之间的相对滑移,必须在钢筋和混凝土两者间界面创建联结单元.联结单元能沿着与联结面垂直方向传递压应力,也能沿着与联结面平行方向传递剪应力,但不传递拉应力.可以采用三向弹簧联结单元.这组弹簧是假想的力学模型,具有弹性刚度,但并无实际几何尺寸,可以放置在需要设置联系的任何位置.平行于两种单元接触面的弹簧用以计算相对滑移和粘结力,垂直于两种单元接触面的弹簧用以考虑钢筋的销拴作用.三个弹簧刚度分别为kh、kv1和kv2,其中弹簧单元的平面图见图3.3.2.3.1 粘结单元的非线性刚度[3,9]弹簧单元刚度的确定比较困难,其刚度值与所采用的粘结滑移关系密切相关,而粘结滑移关系又受到许多因素的影响而难有统一的表达式.分析结果的准确程度取决于弹簧刚度的取值.通常对垂直于钢筋锚长的弹簧刚度取值无限大,平行于锚固方向的弹簧可按τ-s关系表达式对s求导的方法得到.①平行于钢筋方向的弹簧刚度kh.有关kh的计算,不同的研究者根据各自的试验提出关系表达式,再通过微分求导出不同计算公式,目前较为流行的有Nilson公式和Houde和Mirza公式.Houde和Mirza公式为A是从属于一个弹簧的钢筋面积.②垂直于钢筋方向的弹簧刚度kv.kv的取值较复杂,弹簧刚度可以取无限大.本文按Houde-Mirza公式确定kh,另外取kv1=kv2=1012[10].3.2.3.2 Matrix27刚度矩阵 Matrix27是一种能代表任意单元的矩阵单元,但其几何特征无定义,但其弹性运动学响应可用刚度、阻尼或质量系数来指定.它内部有一种变量用以表明使用的是哪一种响应(刚度、质量或阻尼).矩阵单元连接两个结点,每个节点有6个自由度:沿结点坐标系X、Y、Z方向的平动和绕结点坐标系X、Y、Z的转动.可以用这个单元来模拟双向(平面单元)或三向弹簧单元,刚度值可依据单元刚度矩阵的物理意义设定.在不同的荷载步下根据滑移值,依据粘结滑移关系修正弹簧的刚度.这些可以用FORTAN语句编写一个循环程序输入到ANSYS程序中.在Matrix27刚度矩阵为12×12的对称刚度矩阵,其实常数中需定义C1~C78,见图4.在沿钢筋方向某一位置i有一结点对(钢筋上结点bari和混凝土上结点hnti),取钢筋上结点bari对应的位移UZbari,混凝土上结点hnti对应的位移UZhnti.相对位移ΔUZi=UZbari-UZhnti,则此处滑移S=UZi.代入Matrix27单元对称刚度矩阵形(如下所示)成初始刚度矩阵,然后在不同的荷载步下根据滑移值,依据粘结滑移关系修正弹簧的刚度.3.2.3.3 创建联结单元采用非线性有限元方法分析钢筋混凝土之间粘结问题,一般的做法是对钢筋和混凝土分别划分单元,然后在钢筋和混凝土单元在同一坐标位置的节点之间增设虚拟的三向弹簧单元.具体作法:沿钢筋方向的某一位置,在钢筋上拾取i结点,在混凝土上拾取j结点,把这两个结点创建为联结单元(见图2),并赋予这个联结单元相对应的刚度矩阵.这样沿着每根钢筋依次从上到下,分别创建赋予刚度矩阵的联结单元.某预埋钢构件,有4Φ25钢筋埋入钢筋混凝土梁,混凝土为C60.混凝土的EX=3.6e4 N/mm2,PRXY=0.2,ft=2.04 N/mm2,fc=27.5 N/mm2.在混凝土裂缝处理中,采用开裂的剪力传递系数βt来反映剪切面上裂缝张开状态下剪切刚度的变化;又采用闭合的剪力传递系数βc来反映裂缝闭合状态下开裂面的剪切刚度.参考相关文献[1,2,8]以及试算收敛情况,取βt=0.5,βc=0.8. 钢筋为Ⅲ级,弹性模量 EX=2e5 N/mm2,泊松比 PRXY=0.3,屈服强度400 MPa,切向摸量0.钢筋混凝土梁内的钢筋(主筋和箍筋)按离散钢筋处理,在SOLID65单元中x、y、z方向的体积配箍率分别为1.2%、0.7%、1.5%.根据文献[10],令 C1=C58=1012,C7=-1012,C13=C64=1012,C19=-1012,C24=C69=Kh,C30=-Kh,其它系数均设置为零.这样把C1~C78参数化来定义的Matrix27单元刚度矩阵.采用荷载增量法和Newton-Raphson相结合,线性搜索技术、应用预测、自适应下降等加速收敛技术有机结合建立的非线性平衡方程求解方法.影响求解方程的因素主要有网格密度、子步数、收敛准则.如果F范数曲线走形很长,可以考虑增大子步数NSUBST.采用力收敛准则,精度比默认0.5%可以适当放大,设置为5%.破坏准则为Kupfer准则.一根受拉钢筋的计算结果见图4和图5.在ANSYS软件中,钢筋混凝土结构或构件可采用分离式的模型,合理选取钢筋与混凝土的本构模型和粘结滑移关系经验公式,可以进行钢筋与混凝土间的粘结滑移非线性有限元分析.合理选取单元和划分网格,如混凝土采用SOLID65单元,钢筋采用LINK8单元,粘结滑移采用创建并付属性Matrix27的三向弹簧单元;合理设置Willam-Warnke五参数强度准则的6个参数,尤其是开裂和闭合的剪力传递系数.需要在ANSYS软件现有的基础上进行材料本构关系以及粘结滑移关系的二次开发,从而能深入地开展钢筋混凝土非线性的研究.[1]过镇海.钢筋混凝土原理[M].北京:清华大学出版社,1999.[2]宋启根,单炳梓.钢筋混凝土力学[M].南京:南京工学院出版社,1986. [3]朱伯芳.有限元单元法原理与应用[M].北京:中国水利水电出版社,2000. [4] Nilson A H.Nonlinear analysis of reinforced concrete by the finite element method[J].ACI Journal,1968,65(9):757-766.[5] Houde J.Study of force-displacement relationships for the finite element analysis of reinfoeced concrete[D].Montreal:Mc Gill University,1973.[6]徐有邻.变性钢筋-混凝土粘结锚固性能的试验研究[R].北京:清华大学,1990.[7]朱伯龙,董振祥.钢筋混凝土非线性分析[M].上海:同济大学出版社,1985.[8]江见鲸.混凝土结构工程学[M].北京:中国建筑工业出版社,1998.[9]吕西林,金国芳,吴晓涵.钢筋混凝土结构非线性有限元理论与应用[M].上海:同济大学出版社,1996.[10]刘龙强,吴胜兴,周继红.ANSYS软件分析钢筋混凝土粘结滑移关系的二次开发实践[J].工程力学:增刊,2001(A2):85-89.Abstract:In this paper,a global algorithm is proposed for solving generalized quadratic fractional programs with nonconvex quadratic constraints(P1).Due to its intrinsic difficulty,less work has been devoted to globally solving this problem.The proposed algorithm is based on the recently developed theory of monotonic optimization,and it turns out that the optimal solution which is provided by the algorithm isadequately guaranteed to be feasible and to be close to the actual optimal solution.Convergence of the algorithm is shown and the numerical experiments is reported to show the feasibility and effectiveness of the proposed algorithm.Key words:global optimization;fractional programming;monotonic optimizationConsider the following generalized quadratic fractional programs with nonconvex quadratic constraints:where Q,P,Gmare N×N matrixes,q,p,wmare N-vectors,q0,p0,hmare real constants,for m=1,…,M.Then it follows that the constraint set is nonconvex to problem(P1).We assume throughout thatyTpy+pTy+p0>0,y∈Ω0.Most of the theoretical and algorithmic work in fractional programming [1-4]applies only to concave fractional programs or to special cases of concave fractional programs.To our knowledge,there exist few algorithms for globally solving problem(P1).Recently,a few algorithms have been proposed for solving special cases of problem(P1).For instance,algorithmic and computational results for convex-convex quadratic fractional programming can be found in[5-6].In this section we show that problem(P1)can be transformed into an equivalent monotonic optimization problem,which is equivalent to(P1). By solving two quadratic programming problems,we can obtain positive constants L and U such that 0<L≤yTpy+pTy+p0≤U,∀y∈Ω0.Next,by introducing an additional variablew,one can convert the problem(P1)intoThe key equivalence result for problems(P1)and(P2)is given bythe following Theorem 1.Theorem 1 If(y*,w*) is a global optimal solution for problem (P2),then y*is a global optimal solution for problem(P1).Conversely,if y*is a global optimal solution for problem(P1),then(y*,w*)is a global optimal solution for problem(P2),where w*=1/(yTQy+qTy+q0). ProofThe proof is similar to Theorem 1 in Ref.[7],it is omitted here. Note that the objective function and the constrained functions of problem (P2)are all polynomials inRN+1.Let G(y,w)=G+(y,w)-G-(y,w),Fm(y)=Fm+(y)-Fm-(y)and H(y,w)=H+(y,w)-H-(y,w)be the d.m.representations of G(y,w),F(y),H(y,w)as described in the problem(P2).Then by introducing an additional variable z∈Rto(P2),we can obtain the following equivalent problem:Clearly the objective function of(P3)is increasing and each constrained function is a d.m.function.The validity of this approach follows from the following result.Theorem 2If(y*,w*,z*)is a global optimal solution for problem(P3),then(y*,w*)is a global optimal solution for problem(P2).Conversely,if(y*,w*)is a global optimal solution for problem(P2),then(y*,w*,z*)is a global optimal solution for problem(P3),where,z*=-G-(y*,w*).Proof The proof of this theorem follows easily from the definitions of problems(P2)and(P3),therefore,it is omitted.Based on the above discussion,here,from now on we assume that theoriginal problem(P1)has been equivalently converted to the monotonic optimization problem.Algorithm StatementStep 0 Initialization.Given convergence tolerance ε>0.If no feasible solution is known,let V=g(xu)+ε with X0=[xl, x u ];Otherwise,letxˆbe the best nonisolated feasible solution available,V=g(xˆ).Letq=0. Step 1 Reduction cut.For each rectangle X∈Q,compute its valid reduction red X,which we can obtain by using the reduction cut.Then,if red X= ○ ,then delete X;Otherwise,replace X by red X,and compute an upper bound UB(X)for h(x)over the feasible solutions in X and delete X if UB (X)<0.Step 2 Fathoming step.Let Qq′be the collection of rectangles that results from Qqafter completion of Step 1.Let Fq′=Fq∪Qq′.If Fq′= ○ then terminate:xˆis an essential ε-optimal solution of(P)if V=g(xˆ),or the problem(P) is nonisolated infeasible if V=g(xu)+ε;Otherwise,let [aq,bq]:=Xq∈arg max{UB(X)│X∈Fq′},and let UBq=UB(Xq). Step 3 Optimality check.If UBq<ε,then terminate:xˆis an essential ε-optimal solution of(P)if V=g(xˆ),or the problem(P)is ε-nonisolated infeasible if V=g(xu)+ε.Step 4Updating feasible solution.If UBq≥ε,and g(bq)>V-ε,then compute xq=aq+γq(bq-aq)with g(xq)=V-ε;If UBq≥ε,and g(bq)≤V-ε,then let xq=aq.(4.1)If h(xq)≥0 then xqis a new nonisolated feasible solution of(P)with g(xq)≤V-ε.Reset xˆ←xq,V←g(xˆ).Go to Step 5.(4.2)If h(xq)<0,go to Step 5,with xˆunchanged.Step 5 Partitioning step.Divided Xqinto two subrectangles by the branching process.Let Qq+1be the collection of these two subrectanglesof Xq,Fq+1=Fq′\{Xq}.Reset q←q+1,and return to Step 1.Theorem 3 (Convergence result).The above algorithm terminates after finitely many steps,yielding either an essential ε-optimal solution of (P),or an evidence that the problem is nonisolated infeasible. ProofSee Theorem 5.1 in Ref.[8].To verify the performance of the proposed global optimization algorithm,there exists one computational issue to be considered in the following.The algorithm is coded in Matlab and some test problems are implemented on a Pentium (R)4 CPU 2.66 GHz with 512 MB memory microcomputer.Numerical results show that the proposed algorithm can globally solve the problem(P1).Below we only describe some of these sample problems and the corresponding computational results.For these problems,the numerical results are illustrated in Tab.1 and Tab.2.Clearly,the upper and lower bounds of y32+5y1y2are U=49 and L=6,respectively.With ε=0.001,the algorithm found an es sential ε -optimal minimum 0.610 331 791 388 32 after 35 iterations at the essential ε -optimal solution yˆ=(1.258 840 471 299 51,1.523 388 209 853 02,1.030 851 968 215 46).Example 3In Tab.1,the notations have been used for column headers:Ref.:reference;Iter:the number of algorithm iteration.Example 4 Consider the problemAll elements of Q,P Gmwere randomly generated between 0 and 1;The vectors p,q and wmare generated by using random numbers in the interval[-t,t],where t is the average of the elements of P,Q,respectively,and p0,q0,hmare the average of p,q,wm,respectively. Numerical results are summarized in Tab.2,where average CPU seconds denoted by T are obtained by running the proposed algorithm for 20 tests problems.Tab.2 shows the average performance of the proposed algorithm when the convergence tolerance ε was fixed at 0.05.Through four examples and some randomly produced examples,it is shown that the proposed algorithm is effective.【相关文献】[1] Charnes A,Cooper W W.Programming with linear fractional functions[J].Nav Res Logist Q,1962,9:181-186.[2] Schaible S.Fractional programming II,on Dinkelbachs algorithm[J].Manag Sci,1976,22:868-873.[3] Dinkelbach W.On nonlinear fractional programming[J].Manag Sci,1967,13:492-498.[4] Lo A W,MacKinlay A C.Maximizing predictability in the stock and bond markets [J].Macroeconomic Dynamics,1997,1:102-134.[5] Benson H P.Fractional programming with convex quadratic forms and functions [J].Europ J Oper Res,2006,173:351-369.[6] Yamamoto R,Konno H.An effcient algorithm for solving convexconvex quadratic fractional programs[J].Optim J Theory Appl,2007,133:241-255.[7] Benson H P.Global optimization algorithm for the nonlinear sum of ratios problem [J].J Optim Theory Appl,2002,112:1-29.[8] Chen Yongqiang,Jiao Hongwei.A nonisolated optimalsolution of general linear multiplicative programming problems[J].Computers and Operations Research,2009,36(9):2573-2579.。
Step
00
概要
钢筋混凝土梁粘结滑移分析▪混凝土梁粘结滑移分析
▪模型
- 单位 : N, mm
- 各向同性非线性材料
- 钢筋单元
- 实体单元
- 植入式界面单元
▪荷载和边界条件
- 自重
- 恒载
- 约束
输出结果
-变形
- 界面应力、位移
Step
分析类型 : [3D]
点击[ ]键 单位 : [N, mm]
点击[确认] 键 点击[确认] 键
2 3 4 5
操作步骤
分析 > 分析控制 – 控制 表单
01
1 分析控制对话框在新建项目时自动弹出.
1
2
3
4
5
Step
选择参考面为“X-Z ”平面 选择视图为前视图 定义栅格尺寸为“50” 打开栅格开关
1 2 操作步骤
02
3 1
3
几何 >工作平面 > 移动…
2 4 4
Step
03
打开捕捉“栅格”开关 打开创建矩形的命令
在模型窗口中,找到第一点“-150,250”
找到第二点“150,-250”,形成500*300的矩形线框
2 操作步骤
3 4
1 1
2
4
几何 >曲线 > 在工作平面创建 > 2D 矩形(线框)…
3
Step
04
选择短边的两条线
播种方法选为“分格数量”
分割数量输入“6” 点击[适用]键
再次选择长边的两条线 播种方法选为“分格数量” 分割数量输入“10” 点击[确认] 键
2 操作步骤
3 4 网格 > 网格尺寸控制 > 线网格尺寸…
Enter 是[适用]的快捷键.
3 2
1 5
4 5
6 6
7 7
8
8
1
Step
选择“自动映射”,选中模型中的4条线
在“特性”中输入“1” 点击[确认] 键
几何 >工作平面 > 移动… 点击[重设为GCS]
1 2 3 4 5
操作步骤
05
3
5
模型 > 映射网格> 映射网格面…
1
2
此处不用具体输入特性值,形成的单
元仅为了后期拉伸成实体所用,后期将会把它们删除。
点击[创建] 键
分别定义“混凝土与钢筋”的材料,该部分可以定义为非线性,具体参数及定
义方法可参照本书中《钢筋混凝土梁裂缝分析》一文进行定义,这里不再赘述
2
操作步骤
2
2
1 1
创建界面单元
类型选为“粘结滑动”
法向/切向刚度输入“29791、297”
在“幂次法则”中,常量“a 与b ”分别输入30、0.18,切向滑动输入“1e-5”
点击[确认] 键
2 5
操作步骤
3 4
3
4
2
1 (1)本文所给参数仅供参考,不具有
实际工程意义。
参数应以实验为准。
(2)FEA 一共提供了7种界面单元的类型,具体原理可参见迈达斯公司编制的《FEA 分析设计原理》
建立3D 单元 创建混凝土特性
创建1D 单元
类型选为“桁架” 材料选为钢Q345
点击[截面库],在弹出的菜单里,输入直径为16mm 、14mm 的圆,分别建立主筋与箍筋。
钢筋类型选为“桁架” 点击[确认]键
2 5 操作步骤
3 4 1 2
7
4
5
6
6
7
8
8
输入直径后,程序将自动计算截面积
Step
09
网格 > 建立网格 > 延伸网格…
选择类型为“2D->3D ” 选中刚才建立的所有单元
扩展方向选为“整体坐标轴Y 轴“
选择“等间距”、“偏移/次数”,偏移距离输入“100”,次数输入“30”
原网格选为“删除” 特性选为“混凝土” 点击[确认] 键
2 操作步骤
3 4
3
2
1 1
5
4
5 6 6
7
7
Step
10
选择类型为“节点->1D ”
选择类型改为“节点”,选中如图所示的4个节点
扩展方向选为“整体坐标轴Y 轴“
选择“等间距”、“偏移/次数”,偏移距离输入“3000”,次数输入“1”
特性选为“钢筋” 点击[确认] 键
2 操作步骤
3 4
3
2
1 1
5
4
5 6
6
网格 > 建立网格 > 延伸网格…
2
程序将自动对于植入式界面单元的钢筋
单元进行二次划分,所以此处无需定义分割数量,后面的箍筋情况一样。
Step
依次连接4个主筋定位点,建立4条线 几何 > 转换>平移 选择刚才生成的4条线
方向选为“整体坐标轴Y 轴”
选为“不等间距复制”,间距输入“100,20@140”
点击[确认] 键
删除最开始建立的4条线
1 2 3 操作步骤
11
4
6
几何 > 曲线>创建3D> 3D 直线 (1)
3 4 5
6 5
7
Step
选择刚才生成的所有“箍筋” 分割数量输入“1” 特性选为“箍筋”
点击[确认] 键
1 2 3 4
操作步骤
12
3
网格 > 自动网格划分> 自动线网格…
1
2
4
Step
选择所有的钢筋单元 特性选为“界面” 不勾选“锚固”
点击[适用] 键
1 2 3 4
操作步骤
13
3
网格 > 单元> 植入式界面单元…
1
2
4
Step
选择梁两端的所有节点 选为“铰支” 点击[确认] 键
1 2 3
操作步骤
14
分析 > 边界条件> 约束…
1
2
3
类型选为“3D 单元面” 选择梁上表面的所有单元 输入数值“0.1”
点击[确认] 键
1 2 3 4
操作步骤
1 4
3
2
点击分析控制
迭代类型选为“弧长”
荷载步骤数输入“30”,初始荷载因子
输入“0.2”,其余默认。
收敛标准选“位移标准”,并在后面输入“0.01”。
将所有单元及边界条件拖入至“应用” 点击[确认] 键 分析 > 求解
1 2 3
操作步骤
1
6
4
5
5
6 2
4
3
6
Step
操作步骤
17
1
2
后处理工作目录树 :结构非析性> 反力/位移...
反力:查看不同方向的反力 位移:查看不同方向的位移
1 2
Step
操作步骤
18
1
2
后处理工作目录树 :结构非析性> 1D 单元力/1D 单元应变...
1D 单元力:查看钢筋单元所受内力 1D 单元应变:查看钢筋单元的应变
1 2
Step
操作步骤
19
1
2
后处理工作目录树 :结构非析性> 3D 单元应力/3D 单元应变...
3D 单元应力:查看混凝土所受应力 3D 单元应变:查看混凝土的应变
1 2
Step 操作步骤 20
1
2
后处理工作目录树 : 结构非析性> 1D Embedded Interface Traction/RDisp... STx 、STy 、STz 、:为界面单元上产生的X 、Y 、Z 方向的应力 DUx 、DUy 、DUz 、 :为界面单元上产生的X 、Y 、Z 方向的位移
1
2
Step 数据:界面应力: 1D Embedded Interfac e Traction STy
界面位移: 1D Embedded Interface RDis p., Duy
全部选择:选择所有荷载步骤
单元:2025(端部截面上部节点) 表格:生成表格结果
利用Excel 表格,生成应力/位移曲线
操作步骤 21
1 2 3
4 2 1 3
4
5 5
后处理> 提取结果...
Step
END。