基于测距功能的车辆无线定位算法及精度分析
- 格式:pdf
- 大小:1.33 MB
- 文档页数:4
一、GPS/北斗系统及其定位原理GPS/全球定位系统(英语:Global Positioning System,通常简称GPS),又称全球卫星定位系统,是一个中距离圆型轨道卫星导航系统。
它可以为地球表面绝大部分地区(98%)提供准确的定位、测速和高精度的时间标准。
系统由美国国防部研制和维护,可满足位于全球任何地方或近地空间的军事用户连续精确的确定三维位置、三维运动和时间的需要。
该系统包括太空中的24颗GPS卫星;地面上1个主控站、3个数据注入站和5个监测站及作为用户端的GPS接收机。
最少只需其中3颗卫星,就能迅速确定用户端在地球上所处的位置及海拔高度;所能收联接到的卫星数越多,解码出来的位置就越精确。
该系统由美国政府于1970年代开始进行研制并于1994年全面建成。
使用者只需拥有GPS接收机即可使用该服务,无需另外付费。
GPS信号分为民用的标准定位服务(SPS,Standard Positioning Service)和军规的精确定位服务(PPS,Precise Positioning Service)两类。
由于SPS无须任何授权即可任意使用,原本美国因为担心敌对国家或组织会利用SPS对美国发动攻击,故在民用讯号中人为地加入选择性误差(即SA政策,Selective Availability)以降低其精确度,使其最终定位精确度大概在100米左右;军规的精度在十米以下。
2000年以后,克林顿政府决定取消对民用讯号的干扰。
因此,现在民用GPS也可以达到十米左右的定位精度。
GPS系统拥有如下多种优点:使用低频讯号,纵使天候不佳仍能保持相当的讯号穿透性;全球覆盖(高达98%);三维定速定时高精度;快速、省时、高效率;应用广泛、多功能;可移动定位;不同于双星定位系统,使用过程中接收机不需要发出任何信号增加了隐蔽性,提高了其军事应用效能。
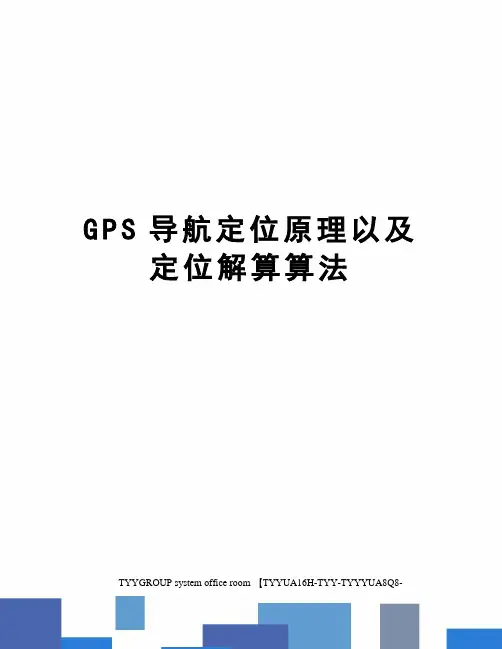
GPS系统的组成一个随着地球自转的GPS卫星星座例子。
在此例子中,可接收到的卫星数量是以北纬45°为基准,而此数量会随着时间而变动。
G P S导航定位原理以及定位解算算法TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1 地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ 构成右手坐标系(即指向东经90度方向)。
WSNs中测距误差对定位精度的影响及改进算法研究的开题报告一、选题背景和意义随着无线传感器网络(WSN)技术的不断发展,WSN已被广泛应用于许多领域,如环境监测、智能交通、军事领域等。
在WSN应用中,节点定位技术是至关重要的,因为节点位置信息能够为许多应用提供重要的数据支持。
在WSN中,节点定位精度的影响因素很多,其中测距误差是影响节点定位精度的重要因素之一。
因此,本课题的研究目的是探究测距误差对节点定位精度的影响,并提出改进算法,以提高节点定位精度,进一步提升WSN的应用性能。
二、研究内容和目标(一)研究内容1. 分析测距误差对节点定位精度的影响机理2. 探究目前常用的节点定位算法及优缺点3. 提出测距误差对节点定位算法的改进策略和方案4. 通过仿真实验验证改进算法的有效性和可行性。
(二)研究目标1. 确定测距误差的影响机理和测距误差对节点定位精度的影响程度。
2. 探究目前常用的节点定位算法的优缺点,为后续改进提供参考。
3. 提出针对测距误差的节点定位算法改进方案,提高节点定位精度。
4. 通过仿真实验验证改进算法的有效性和可行性。
三、研究方法和技术路线(一)研究方法1. 文献综述法:对国内外相关文献进行梳理,系统地阐述测距误差对节点定位精度的影响机理和目前节点定位算法的现状和存在的问题。
2. 实验仿真法:使用MATLAB等仿真工具对节点定位算法进行仿真实验,验证改进算法的优化效果和可行性。
(二)技术路线1. 文献综述法:对现有文献进行分类整理,分析测距误差对节点定位精度的影响机理,探究目前节点定位算法的优缺点。
2. 提出改进算法:在分析测距误差的基础上,提出针对测距误差的节点定位算法改进方案。
3. 节点定位算法仿真:使用MATLAB等仿真工具对节点定位算法进行仿真实验,验证改进算法的优化效果和可行性。
四、预期研究结果本课题旨在探究测距误差对节点定位精度的影响以及改进算法,预期研究结果如下:1. 分析测距误差对节点定位精度的影响机理及测距误差对节点定位精度的影响程度。
无线传感器网络RSSI测距方法与精度分析詹杰;吴伶锡;唐志军【摘要】基于RSSI的测距技术是一项低成本的距离测量技术.分析了接收信号强度指示器(RSSI)多种测距模型,结合采用IEEE802.15.4协议的CC2430芯片,设计了测距实验,获取了多组数据,通过对实验数据的分析,提出结合信标节点确定参数、高斯拟合确定测量值的RSSI测距处理方法.实验证明,该方法能提高RSSI测距的抗干扰能力,20 m内节点间的测距精度能达到1.5 m以下.【期刊名称】《电讯技术》【年(卷),期】2010(050)004【总页数】5页(P83-87)【关键词】无线传感器网络;接收信号强度指示器;测距精度;高斯拟合【作者】詹杰;吴伶锡;唐志军【作者单位】湖南科技大学,物理学院,湖南,湘潭,411201;湖南科技大学,物理学院,湖南,湘潭,411201;湖南科技大学,物理学院,湖南,湘潭,411201【正文语种】中文【中图分类】TN9291 引言在无线传感器网络应用中,位置信息对传感器网络的监测活动至关重要, 在目标监测与跟踪、基于位置信息的路由、网络的负载均衡以及网络拓扑结构[1]等许多应用中都要求网络节点预先知道自身的位置,以便在通信和协作过程中利用位置信息完成应用要求。
常用的定位方法必须测量节点间间距,一般测距方式有GPS[2]、红外线[3]、超声波[4]和接收信号强度指示器(RSSI)[5]等。
GPS定位成本高、误差大;红外测距精度高、成本低,但适用范围太窄;超声测距需要额外的硬件,增加了节点的硬件成本和尺寸并且能耗高,受气温、湿度等的影响较大;RSSI测距误差大,这些方式都不适合无基础设施的矿山地质灾害监控系统使用。
在矿山地质灾害监测项目中,我们利用商用无线收发芯片所具备的RSSI功能对监控系统收发的数据进行处理,提高RSSI测距的精度,实现了低成本的测距。
2 RSSI测距原理无线信号传输的一个重要特点就是信号强度随着距离的增大而衰减。
SRS定位算法在无线传感器网络中的性能分析无线传感器网络(Wireless Sensor Networks, WSN)是一种由大量分布式传感器节点组成的网络系统,用于收集和传输环境中的各种数据。
传感器节点通过无线通信和协作来共同完成感知、处理和传输任务。
SRS(Signal Strength-based Range-free Localization)定位算法是一种无线传感器网络中常用的定位算法,通过测量节点之间的信号强度来估计节点的位置。
本文将对SRS定位算法在无线传感器网络中的性能进行分析。
首先,我们来了解一下SRS定位算法的工作原理。
SRS算法基于信号强度测量,通过节点之间的信号强度来估计节点的位置。
该算法不需要节点之间的距离信息,也不需要事先知道节点的相对位置。
具体而言,SRS算法通过节点之间的信号强度来构建信号强度图,并基于图中的信号强度信息计算节点的位置。
该算法的优点在于简单、灵活,适用于大规模的无线传感器网络。
接下来,我们将对SRS定位算法在无线传感器网络中的性能进行分析。
首先,我们关注算法的定位精度。
定位精度是衡量定位算法性能的重要指标之一,它反映了算法估计节点位置的准确程度。
SRS算法基于信号强度测量进行定位,对于信号强度的测量误差,定位精度会受到影响。
因此,SRS算法的定位精度受到信号强度测量误差的限制。
如果信号强度测量误差较大,SRS算法的定位精度会受到较大影响,造成节点位置估计的偏差。
其次,我们关注算法的定位计算复杂度。
定位计算复杂度反映了算法在计算节点位置时所需的时间和计算资源消耗。
SRS算法的计算复杂度相对较低,因为它不需要节点之间的距离信息和节点的相对位置信息,只需要节点之间的信号强度。
因此,SRS算法在大规模无线传感器网络中具有较好的可扩展性。
另外,我们关注算法的鲁棒性。
鲁棒性是指算法对于传感器节点随机分布、信号强度变化等因素的适应能力。
SRS算法在一定程度上受到节点分布不均匀和信号强度变化的影响。
基于UWB的室内停车场高精度定位系统设计陈旻哲;熊诚;刘守印【摘要】将基于TOA测距的 UWB高精度定位技术运用于室内停车场车辆定位系统.选用 DW1000射频收发器设计定位节点硬件,采用时分复用机制实现多标签共享信道.分析测距误差来源,认为信号飞行时间的测量值相对于真实值的误差应该由节点的时钟漂移、本地响应延迟和飞行时间真实值表示,因此,从该角度详细推导并仿真对比4种测距算法受时钟漂移影响的程度,最终选定改进的SDS-TWR算法进行测距.实验发现天线延迟会给测距结果带来相对固定的偏差,针对这一测距误差,提出通过修正天线延迟参数予以校正.基于均方误差最小化方法,采用约束线性最小二乘定位算法估计标签位置.实验结果表明,测距精度小于4 cm,定位精度不超过20 cm,能够满足室内停车场车辆定位系统的厘米级精度要求.%In the paper,UWB which is a high precision localization technology based on TOA ranging is applied to indoor parking areas localization system.The DW1000 RF transceiver is chosen to design anchors and tags.TDM mechanism is used to achieve that one chan-nel is shared by the multiple tags.The source of the ranging error is analyzed,it is proposed that the error between the measured value and the true value of time of flight of signal should be expressed by the clock drift of the node,the local response delay and the true value of TOF.From this perspective,the ranging error is derived in detail.And ranging errors of four ranging algorithms caused by clock drift are simulated and compared.Finally,the advanced SDS-TWR algorithm is applied.It is found that the antenna delay brings a relatively fixed deviation to the ranging results.To correct this error,it is proposed to adjust theantenna delay parameter.Depending on the mean square error minimization method,the constraint linear least squares localization algorithm is used to estimate the tag position.The result of experiments show that the accuracy of ranging is less than 4 cm,and the accuracy of localization is not more than 20 cm.Therefore, this localization system can meet the requirements of centimeter-level accuracy for indoor parking areas.【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2018(018)004【总页数】7页(P32-38)【关键词】室内停车场定位;UWB;时钟漂移;天线延迟;最小二乘【作者】陈旻哲;熊诚;刘守印【作者单位】华中师范大学物理科学与技术学院,武汉 430079;华中师范大学物理科学与技术学院,武汉 430079;华中师范大学物理科学与技术学院,武汉 430079【正文语种】中文【中图分类】TN99引言在室内停车场,车速一般被限制在5 km/h以内,即不超过1.39 m/s。
车载导航系统的高精度定位算法马海波1,黄跃峰1,滕寿威1摘要:本文提出了一种基于联合卡尔曼滤波理论和地图匹配技术的高精度车载导航系统定位方法。
该方法一方面对联合卡尔曼滤波器的结构进行简化,简化后的联合滤波器能够较好的将全球定位系统(GPS)与航位推算系统(DR)获取的空间信息进行融合,不仅较大程度减小滤波计算量,而且避免了子滤波器间误差的互相干扰,提高了空间定位精度。
另一方面提出了根据行车方向与位置匹配行车道路的技术,该技术不仅具有较好的行车道路匹配效果,而且能够对各种行车异常情况进行处理。
实验证明,本文提出的方法能够较好的满足车载导航系统对空间定位方法实时性及高精度的要求。
关键词:车载导航系统,联合卡尔曼滤波,信息融合,地图匹配,GPS/DR(1北京超图软件股份有限公司导航事业部,北京市海淀区西三旗建材城西路太伟科研楼B座3层邮编;100096)1.概述近几年,国内车载导航系统的发展如火如荼,基于全球定位系统(Global Position System, GPS)定位的导航系统几乎成了豪华轿车的标准配置。
由于巨大的市场潜力和不可估量的发展前景,各汽车厂商和GIS企业纷纷投入大量人力进行车载导航系统的软硬件开发。
作为车载导航系统的基础和核心,车辆定位获得了更多学者的关注和热情。
本文首先结合车辆定位方式,阐述了全球定位系统和航位推算系统(Dead Reckoning, DR)相结合的组合定位方式的必要性和优越性,尤其从价格和精度方面考虑,GPS/DR将是未来车辆定位的最理想方式。
无论是独立GPS定位,还是组合GPS/DR方式定位,得到可靠的、精确的实时车辆位置是车辆定位的根本目的。
结合实际应用,城市车辆的高精度定位算法包括两个部分:1)针对定位传感器的滤波与信息融合,2)结合电子地图的道路匹配算法。
提高传感器定位精度的方法是降低甚至去除系统定位的随机误差。
本文提出了一种简化结构的联合卡尔曼滤波器。
基于Wi-Fi技术的车辆室内定位方法陈施奇【摘要】为了实现室内精确导航,以地下停车场为例,采用的基于WiFi信号往返延时(RTT)的车辆室内定位算法对车辆进行定位.从现实角度,分析使用RTT进行定位的可行性,通过实际检测,车辆定位误差在1米以内,证明该方法可以有效确定车辆位置.【期刊名称】《黑龙江科技信息》【年(卷),期】2018(000)013【总页数】2页(P47-48)【关键词】室内定位;信号往返延时(RTT);测试【作者】陈施奇【作者单位】武汉船舶职业技术学院,湖北武汉 430050【正文语种】中文【中图分类】TN92随着汽车工业的蓬勃发展,城市交通拥堵、道路交通事故以及恶劣天气下道路交通安全成了亟待解决的问题。
基于此,智能交通(Intelligent Transport System,简称ITS)及车辆无线通信系统等概念应运而生。
智作为智能交通领域最热门的研究方向和核心技术之一,随着全球定位系统(Global Positioning System,简称GPS)的全民化应用,以及各类智能终端设备的普及,车辆的实时定位、路径规划及导航技术已得到了广泛的推广与运用。
然而,由于GPS卫星信号受建筑物的影响而大大衰减,不能满足车辆在诸如地下停车场等室内区域的卫星定位及导航的应用需求。
随着无线通信技术的发展,新兴的无线网络技术,如WiFi、ZigBee、蓝牙和超宽带等,为代替GPS卫星,实现室内环境下的车辆定位提供了可能。
在新兴的无线网络技术中,基于802.11的WiFi网络应用尤为广泛,目前大部分的办公楼、商场、剧院以及机场等大型建筑都已覆盖WiFi信号。
因此,基于WiFi 网络的室内定位技术成为近年来的研究热点。
本文将以地下停车场为例,布局合理的WiFi信号源,针对车辆定位的特性,改良传统的WiFi室内定位算法,并通过真实环境下的模拟测试,验证本文提出的车辆室内定位的改良算法。
1 WiFi信号源标定为了有效的支持本文所述的车辆室内定位方法,在开始讨论车辆室内定位技术前,首先要对停车场中的WiFi信号源进行标定。
基于RSSI的测距技术的自动修正定位算法龙海燕;张天飞;丁娇;梁美玉;张磊【摘要】针对传统的RSSI测距模型的路径损耗参数固定,不能在环境变化后实时更新参数而导致测距精度不高的问题,提出一种新的无线传感器网络的定位算法.该算法能够根据环境情况动态估计路径损耗模型的参数,同时实时检测环境是否变化,环境变化后能自动的重新标定环境参数,使算法与实际的定位环境相吻合.通过在自行研发的基于CC2530为控制芯片的传感器节点上进行实验分析,实验表明,采用修正后的定位方案,明显提高了测距的精度,算法是有效可行的.【期刊名称】《东莞理工学院学报》【年(卷),期】2019(026)001【总页数】5页(P23-27)【关键词】无线传感器网络;接收信号强度;高斯模型;测距修正【作者】龙海燕;张天飞;丁娇;梁美玉;张磊【作者单位】安徽信息工程学院电气与电子工程学院,安徽芜湖 241000;安徽信息工程学院电气与电子工程学院,安徽芜湖 241000;安徽信息工程学院电气与电子工程学院,安徽芜湖 241000;安徽信息工程学院电气与电子工程学院,安徽芜湖241000;安徽信息工程学院电气与电子工程学院,安徽芜湖 241000【正文语种】中文【中图分类】TN925.93;TP301.6随着城市的快速发展,城市交通拥挤问题已成为当今社会一个关注的焦点。
大力发展公共交通,是改善城市交通问题的一个可靠的手段,而城市公共交通的智能化,提供人性化的服务,广大群众更愿意绿色出行[1]。
公交车辆定位系统是城市公共交通的智能化的基础,无线传感器网络技术作为一种新兴的检测技术,既可作为定位系统也可以作为信息传输系统,非常适合应用于公交定位系统。
因此,将无线传感器网络与城市公交车的定位相结合,是解决城市交通问题的一个切实有效的途径。
目前无线传感器定位技术主要分为基于测距和无需测距的两种方法[2]。
基于测距技术常采用的方法有基于RSSI测距技术。
《基于人工智能的车联网中目标检测与测距算法研究》篇一一、引言随着人工智能和车联网技术的飞速发展,自动驾驶和智能交通系统逐渐成为研究的热点。
在车联网中,目标检测与测距技术是自动驾驶和智能交通系统的重要组成部分,对于提高道路交通安全、减少交通事故具有重要意义。
本文旨在研究基于人工智能的车联网中目标检测与测距算法,以提高车联网的智能化水平和实际应用效果。
二、研究背景及意义车联网,即车辆与车辆、道路基础设施及行人之间的互联互通网络,是现代智能交通系统的重要组成部分。
在车联网中,目标检测与测距技术是关键技术之一。
通过对周围环境中的车辆、行人、障碍物等进行实时检测和测距,可以实现对车辆行驶轨迹的预测,从而提高驾驶安全性。
然而,传统的目标检测与测距算法往往受到复杂多变的道路环境和光照条件等因素的影响,导致其性能不够理想。
因此,基于人工智能的目标检测与测距算法的研究具有重要意义。
三、目标检测算法研究1. 深度学习算法:深度学习算法在目标检测领域取得了显著的成果。
通过构建深度神经网络模型,可以实现对目标的高精度检测。
在车联网中,常用的深度学习算法包括卷积神经网络(CNN)和区域卷积神经网络(R-CNN)等。
这些算法可以通过学习大量数据来提取目标的特征信息,从而实现对目标的准确检测。
2. 优化算法:针对深度学习算法的不足之处,研究者们提出了许多优化算法。
例如,基于梯度下降的优化算法可以调整神经网络的参数,提高网络的性能。
此外,还有一些集成学习算法,如随机森林、梯度提升决策树等,可以通过集成多个弱分类器来提高目标检测的准确率。
四、测距算法研究1. 基于视觉的测距算法:基于视觉的测距算法是通过分析摄像头获取的图像信息来计算目标与车辆之间的距离。
常见的基于视觉的测距算法包括基于立体视觉的测距算法和基于单目视觉的测距算法等。
这些算法可以通过分析图像中的特征点或线条等信息来计算目标与车辆之间的距离。
2. 基于雷达的测距算法:基于雷达的测距算法是利用雷达设备获取周围环境中的目标信息,然后通过计算雷达与目标之间的距离来获得测距信息。
测距定位算法引言:随着科技的发展,测距定位技术在各个领域中得到了广泛的应用。
测距定位算法是基于一定的原理和方法,通过计算得到目标物体与观测点之间的距离,并进而确定目标物体的位置。
本文将介绍几种常见的测距定位算法及其原理。
一、TOA(Time of Arrival)测距定位算法TOA测距定位算法是一种基于时间的测距方法。
其原理是利用信号从发射点到达接收点所需的时间差来计算距离。
TOA算法需要在发射端和接收端分别进行时间同步,然后通过计算信号传播时间差来得到距离信息。
TOA算法的优点是测距精度高,但对于复杂的环境和多径效应敏感。
二、TDOA(Time Difference of Arrival)测距定位算法TDOA测距定位算法是一种基于时间差的测距方法。
其原理是利用信号到达不同接收点之间的时间差来计算距离。
TDOA算法不需要进行时间同步,只需要记录信号到达不同接收点的时间差即可。
TDOA算法的优点是对多径效应不敏感,适用于复杂环境。
三、RSSI(Received Signal Strength Indicator)测距定位算法RSSI测距定位算法是一种基于信号强度的测距方法。
其原理是通过测量接收到的信号强度来推测距离。
RSSI算法不需要进行时间同步,只需要对信号强度进行测量即可。
然而,RSSI算法的测距精度较低,容易受到环境影响。
四、AOA(Angle of Arrival)测距定位算法AOA测距定位算法是一种基于角度的测距方法。
其原理是利用接收到信号的入射角度来计算距离。
AOA算法需要在接收端使用多个天线阵列来测量信号的入射角度,然后通过三角定位原理计算距离。
AOA算法的优点是测距精度高,但需要复杂的硬件设备和算法实现。
五、ToF(Time of Flight)测距定位算法ToF测距定位算法是一种基于飞行时间的测距方法。
其原理是利用信号从发射点到达接收点所需的时间来计算距离。
ToF算法需要在发射端和接收端分别进行时间同步,然后通过计算信号传播时间来得到距离信息。
车辆测距方案随着车辆智能化技术的不断发展,车辆的各种传感器及其应用也日益成熟。
车辆测距就是车辆智能化中的一个关键技术,旨在通过准确的反馈和检测车辆与周围物体、车辆的距离,提高行驶安全和舒适性。
下面介绍几种常见的车辆测距方案。
激光测距方案激光测距(Lidar)是目前最为普遍和高效的测距办法。
它适用于各种环境和各类目标的探测。
激光测距原理是通过发射激光束,反射回来后,根据光束出射时间计算反射物与激光源的距离。
激光测距具有高精度、高稳定性、高更新率等优点,能够检测到非常细小的物体,所以在自动驾驶中比较受欢迎。
目前大部分自动驾驶汽车都会使用激光雷达作为距离测量设备之一。
摄像机测距方案摄像头可以通过拍摄逐帧图像的方式进行距离测量。
该方案需要先校准摄像头,获得摄像头在空间中的位置或者方程,然后通过算法计算物体距离。
该方案虽然不如激光测距的精度和稳定性高,但却便于实现和价格较低。
此外,还可以通过融合多种不同的传感器来提高测距的性能。
超声波测距方案超声波测距方案是通过发射超声波探测物体距离的测距方法。
该方案测量范围一般在5米左右,距离精度不高,且容易受环境因素的影响,但对于一些低速行驶的车辆而言,其实测效果还不错。
超声波测距设备通常由发射器和接收器组成,发射器向前发射一段频率固定的超声波,接收器接收反射回来的声波,计算出物体与车辆之间的距离。
毫米波测距方案毫米波测距方案中,发射器向前发射毫米波,接收器接收反射波,并通过处理之后计算出物体与车辆之间的距离。
毫米波测距相对于激光测距而言价格便宜,具有良好的穿透能力和成像能力,可以检测到障碍物的形状和运动状态。
在高速行驶的车辆中,比起超声波测距更为精确,但毫米波测距的精度和稳定性仍然不如激光雷达。
总结针对车辆测距方案,不同的方案各有优缺点。
激光测距方案具有高精度、高稳定性和高更新率等优点,因此在自动驾驶中普遍应用;摄像机测距方案便于实现和价格较低,可以与其它方案融合使用;超声波测距适用于低速行驶的车辆;毫米波测距相对于超声波测距而言更为精确,但不至于比激光雷达优秀。