交互MCMC—PF的雷达弱小目标检测与跟踪
- 格式:pdf
- 大小:354.80 KB
- 文档页数:5
雷达信号处理中的目标检测与参数估计雷达信号处理是一门研究如何利用雷达系统获取和处理目标信息的学科。
其中,目标检测和参数估计是雷达信号处理的重要应用领域。
本文将分别介绍雷达信号处理中的目标检测和参数估计的原理和方法。
目标检测是指在雷达信号中准确地识别和定位目标的过程。
在雷达系统中,目标检测是一个关键步骤,它可以用于目标跟踪、目标定位、目标识别等应用。
目标检测的主要任务是从雷达接收到的回波信号中提取出目标的特征信息,并将其与噪声进行区分。
常用的目标检测方法包括脉冲-Doppler方法、协方差矩阵检测方法、基于卷积神经网络的方法等。
脉冲-Doppler方法是一种基于传统信号处理理论的目标检测方法。
它利用雷达接收到的回波信号的脉冲宽度和频率信息来确定目标的存在和位置。
该方法根据目标在距离和速度维度上的特征,通过比较回波信号和背景噪声的统计特性来进行目标检测。
脉冲-Doppler方法具有计算复杂度低、实时性好等特点,广泛应用于雷达目标检测中。
协方差矩阵检测方法是一种基于统计特性的目标检测方法。
它利用雷达接收到的回波信号的协方差矩阵来判定目标的存在与否。
该方法通过计算回波信号的协方差矩阵,然后根据协方差矩阵的特征值和特征向量来进行目标检测。
协方差矩阵检测方法具有较好的检测性能和抗噪声性能,适用于复杂环境下的目标检测任务。
基于卷积神经网络的方法是近年来发展起来的一种新型目标检测方法。
它通过训练神经网络来学习雷达回波信号的特征表示,然后利用训练好的神经网络对新的回波信号进行目标检测。
该方法具有较好的自适应能力和泛化能力,适用于复杂目标和复杂信号环境下的目标检测任务。
参数估计是指在雷达信号中准确地估计目标的参数,如目标的距离、速度、角度等。
在雷达系统中,参数估计是一个关键问题,它可以用于目标跟踪、目标识别等应用。
参数估计的主要任务是根据雷达接收到的回波信号,通过解析和处理信号的特征信息,提取出目标的参数信息。
常用的参数估计方法包括脉冲-Doppler方法、最小二乘法、粒子滤波器等。
基于改进动态规划的雷达弱小目标检测与跟踪
曹晓英;张智军;向建军;肖冰松
【期刊名称】《现代防御技术》
【年(卷),期】2013(041)004
【摘要】针对复杂背景下雷达弱小目标的检测和跟踪问题,提出了一种改进动态规划的检测前跟踪算法.该方法用多级检验判决方法代替常用的两级门限检测,并用传统跟踪技术进行目标位置状态估计,根据估计值与状态值的欧氏距离设计一个惩罚项来改进值函数.通过仿真验证,结果表明该方法能有效消除伪航迹,减小计算量,提高对雷达弱小目标的检测和跟踪性能.
【总页数】6页(P141-146)
【作者】曹晓英;张智军;向建军;肖冰松
【作者单位】空军工程大学航空航天工程学院,陕西西安 710038;空军西安飞行学院,陕西户县 710306;空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038
【正文语种】中文
【中图分类】TN957
【相关文献】
1.基于SVM-UPF的雷达弱小目标检测前跟踪算法 [J], 秦占师;张智军;曹晓英;陈稳
2.基于动态规划的雷达弱目标检测前跟踪算法 [J], 张鹏;张林让
3.雷达回波序列中弱小飞机目标检测跟踪数据集 [J], 宋志勇;张永杰;杨彩霞;蔺震;樊润东;回丙伟;范红旗;周剑雄;朱永锋;达凯;张晓峰;苏宏艳;金威
4.雷达回波序列中弱小飞机目标检测跟踪数据集 [J], 宋志勇;回丙伟;范红旗;周剑雄;朱永锋;达凯;张晓峰;苏宏艳;金威;张永杰;杨彩霞;蔺震;樊润东
5.HPRF雷达多机动弱小目标检测跟踪技术 [J], 谭顺成;康勖萍
因版权原因,仅展示原文概要,查看原文内容请购买。
在Matlab中进行雷达信号处理和目标跟踪雷达信号处理和目标跟踪是现代雷达技术的重要组成部分,在军事、航空、航天、气象等领域中具有广泛的应用。
Matlab作为一种功能强大的数学软件工具,为雷达信号处理和目标跟踪提供了便利的开发环境。
本文将介绍如何利用Matlab 进行雷达信号处理和目标跟踪,并探讨一些常用的算法和技术。
首先,我们需要了解雷达信号处理的基本概念和流程。
雷达信号处理包括信号预处理、目标检测、目标定位和跟踪等步骤。
在Matlab中,我们可以利用其丰富的工具箱和函数实现这些步骤。
例如,通过使用信号处理工具箱中的函数,我们可以对雷达信号进行滤波、解调、去噪等预处理操作;而通过使用图像处理工具箱中的函数,我们可以实现雷达信号的目标检测和定位。
此外,Matlab还提供了强大的图形界面和数据可视化工具,使我们能够直观地显示和分析雷达信号。
接下来,让我们具体介绍一些常用的雷达信号处理算法和技术。
其中之一是自适应抗干扰处理技术。
雷达系统在实际应用中可能会受到各种干扰,如天线旁瓶、气象杂波等。
自适应抗干扰技术能够根据实时环境自动调整各种参数,提高雷达系统的抗干扰性能。
在Matlab中,我们可以使用自适应滤波器函数对雷达信号进行抗干扰处理。
另一个常用的算法是脉冲压缩处理。
脉冲压缩是一种通过延长脉冲宽度来提高雷达目标分辨率的方法。
在Matlab中,我们可以利用FFT(快速傅里叶变换)等函数对雷达信号进行压缩处理,从而减小脉冲宽度,提高目标分辨率。
除了雷达信号处理,目标跟踪也是雷达应用中的重要环节。
目标跟踪旨在实时追踪目标的位置和运动状态。
在Matlab中,我们可以使用一些常见的目标跟踪算法,如卡尔曼滤波器和粒子滤波器。
这些算法能够根据目标的先验信息和测量值,精确估计目标的位置和动态特性,并实现目标的实时跟踪。
除了以上提到的算法和技术,Matlab还提供了许多其他功能强大的工具和函数,如多普勒失真校正、雷达图像生成、目标特征提取等。
天基预警雷达微弱动目标检测跟踪方法研究天基预警雷达(空间预警雷达,SSR)是一种通过在地球轨道上安装的雷达系统实现及时发现和跟踪微弱动目标的技术设备。
它的出现在一定程度上填补了当前陆基预警雷达的盲区,并且有效提升了对动目标的预警能力。
本文将探讨天基预警雷达微弱动目标检测跟踪方法的研究。
天基预警雷达的微弱动目标检测是指在复杂的环境下,通过雷达系统对微弱目标进行识别和定位的过程。
由于环境干扰和微弱信号的特性使得微弱动目标的检测和跟踪成为一个复杂的问题。
为了解决这一问题,在天基预警雷达中,通常会采用多切片径向压缩技术(MSRDC)来提高微弱信号的检测性能。
这种技术可以将接收到的雷达数据进行多次迭代处理,并对每一次迭代得到的压缩结果进行累加,从而提高目标信号与干扰信号的功率比,使得微弱目标信号更容易被检测到。
在微弱动目标的跟踪过程中,通常会采用卡尔曼滤波(Kalman Filter)算法来实现目标的状态估计和预测。
卡尔曼滤波是一种递归估计算法,在估计过程中,它会不断地根据当前的观测值和上一时刻的估计值来计算下一时刻的估计值,并且考虑过去的估计误差来修正当前的估计值。
这种滤波算法的主要优势是具有较低的计算复杂度以及较好的跟踪稳定性,尤其适用于微弱动目标的跟踪任务。
除了卡尔曼滤波算法外,还有其他一些方法可以用于天基预警雷达微弱动目标的跟踪。
例如,粒子滤波(Particle Filter)算法可以通过采样方法来对目标的状态空间进行高效的搜索和估计。
神经网络算法可以通过学习目标的运动规律和特征来进行目标跟踪。
此外,其他一些跟踪方法,如基于相关性的跟踪方法和基于目标模型的跟踪方法等也可以结合使用。
这些方法的选择通常取决于目标的运动特征、环境干扰的情况以及雷达系统的性能要求。
综上所述,天基预警雷达微弱动目标的检测和跟踪是一个具有挑战性的问题。
通过使用多切片径向压缩技术和卡尔曼滤波算法等方法,可以有效地提高微弱目标的检测性能和跟踪精度。
基于CRPF的MIMO雷达目标检测前跟踪算法秦文利;李玉翔;郑娜娥【摘要】在对机动弱目标进行检测过程中,由于回波信号含有杂波、干扰等噪声,其统计特性未知,难以对回波信号进行数学建模,无法得到后验概率密度函数,传统的粒子滤波算法性能大幅下降.针对此问题,提出了基于代价参考粒子滤波的MIMO雷达目标检测前跟踪算法.该算法无需背景噪声的统计特性,只需利用目标状态的估计值与真实值之间的差值计算各粒子的代价和权值,避免了通过对噪声进行建模来求得后验概率密度的问题.实验仿真证明,当噪声统计特性未知时,所提算法检测跟踪性能明显优于传统粒子滤波算法.%In the detection of maneuvering weak targets,the statistical characteristics are unknown and the echo signal is difficult to model for the clutter and interference in the echo signal,so the posterior probability density function can't be obtained and the performance of traditional particle filter algorithm decreases.Aiming at this problem,target detection before track algorithm with MIMO radar based on cost reference particle filter.The algorithm does not require of the statistical characteristics of the background noise.The difference between the true value and the estimated value of the target state is used to calculate the cost and weight of each particle,the posterior probability density doesn't require the model of noise.Simulation results show that the proposed algorithm is superior to the traditional particle filter algorithm when the noise statistics are unknown.【期刊名称】《四川大学学报(自然科学版)》【年(卷),期】2017(054)006【总页数】7页(P1222-1228)【关键词】多输入多输出(MIMO)雷达;代价参考;粒子滤波;检测前跟踪【作者】秦文利;李玉翔;郑娜娥【作者单位】解放军信息工程大学导航与空天目标工程学院,郑州 450001;解放军信息工程大学导航与空天目标工程学院,郑州 450001;解放军信息工程大学导航与空天目标工程学院,郑州 450001【正文语种】中文【中图分类】TN958MIMO雷达在对机动弱目标的探测过程中,由于回波信号的信噪比低,且目标存在机动性,导致雷达对目标的检测与跟踪十分困难[1,2].为提高回波信号的信噪比,可以利用增加观测时间以达到积累增益,但是目标的机动性导致无法用简单匹配滤波模型进行相干积累.因此,我们需要用一个复杂的分段模型来描述目标的机动性.基于粒子滤波(Particle Filter,PF)的检测前跟踪算法(Track Before Detection,TBD)是解决上述难题的有效方法.基于PF的TBD算法通过大量带有权值的粒子近似推导目标的后验概率密度,通过状态转移和观测方程进行状态预测和粒子更新,实现基于贝叶斯理论的递推滤波[3].该算法适合处理非线性、非高斯问题,但算法要求噪声的统计特性已知.对于MIMO雷达的一个分辨单元,雷达接收的信号含有目标反射的雷达信号、杂波、相干信号以及噪声,在检测之前,虽然进行干扰抑制和杂波消除,但仍然存在部分干扰、杂波以及噪声,另外,动态系统还会产生动态噪声,这就使得基于PF的TBD算法的检测性能大幅下降.近年来,一些学者提出了基于代价参考的粒子滤波算法(Cost-reference Particle Filter,CRPF)[4],该算法应用于传统单个阵元的雷达中,通过定义与系统统计特性和测量噪声无关的代价和风险进行目标状态估计,从而达到可以处理动态特性未知的非线性系统目标状态估计问题.本文针对MIMO雷达在噪声统计特性未知条件下对机动弱目标的检测与跟踪问题,推导了基于CRPF的TBD检测器,该检测器包含两步,(1)通过CRPF估计出连续的系统状态,由估计出的状态序列和实时的测量数据可以构造一组新的检验统计量,该统计量可以定义为似然比函数.(2)由新的检验统计量进行信号检测.实验仿真证明,在噪声统计特性已知的条件下,CRPF检测器的检测性能与文献[5,6]中两个PF检测器性能相当,在统计特性未知的情况下,由于 PF检测器要求假设噪声服从某种分布特性,错误的分布特性导致检测性能下降,因此CRPF检测器的检测性能要优于PF检测器.本文考虑有I个发射天线和J个接收天线组成的MIMO雷达系统,坐标分别为(xti,yti),i=1,2,…,I和(xrj,yrj),j=1,2,…,J.目标所在的监视区域为长方形,坐标为(x,y),大小为dx和dy.为满足空间分集的条件,需满足条件d>,其中,d为阵元间距,λ为信号波长,R为目标到阵元的距离,D为目标的有效长度.这里假设目标是由均匀散布在区域中的散射系数独立同分布的散射体组成,位于(x+α,y+β)的散射体的散射密度表示为ζ(α,β),(α,β)∈[-dx,dx]×[-dy,dy],且满足第i个发射天线发射的窄带信号为si(t),目标所在监视区域的坐标为(x,y),第j个接收天线接收第i个发射天线的信号为rij(t)=αijsi(t-τ)+w(t)rij(t)=αijgij(xk)+w(t)目前,Kalman滤波、PF和CRPF可以处理不同噪声环境下动态系统中的目标状态估计和跟踪问题,相关的动态系统如下.在统计特性未知的动态系统中,系统噪声和观测噪声的统计特性都是未知的或者十分复杂,难以用简单的概率模型描述,在这种情况下,即使目标状态已知,但其后验概率密度仍然很难得到解析式.文献[4]提出了粒子风险和代价参考,并将粒子风险和代价的实时可选择性更新引进到状态估计中,而不是后验概率密度的更新. 跟Kalman滤波和PF类似,CRPF利用观测序列{z1,z2,…,zk}来估计动态系统(3)中的状态序列算法对目标进行估计需要四个连续的步骤,假设初始状态空间为Ω0,粒子的数量为N,具体步骤如下.Step 1 初始化:产生初始粒子序列该序列可以按照某种概率分布从Ω0中随机产生或者有规则地采样产生,每个粒子的初始代价序列形成了初始的粒子-代价集合. 计算粒子风险和重采样权值:k时刻粒子的风险是由其代价和k+1时刻的观测值决定,定义为Step 2 重采样:与文献[9]中粒子滤波的重采样算法相类似,利用(5)式的重采样权值选取重采样粒子不同的是,重采样前每个粒子的代价被添加到重采样的粒子中,形成新的粒子-代价集合Step 3 粒子更新:从粒子集合Θk中产生第k+1时刻的粒子,对于每个粒子时刻的粒子产生如下.重复步骤Step1~Step3,直至k=K,粒子、代价及其重采样权值每一时刻都会得到更新,由此得到每一时刻的平均代价状态估计或者最小代价状态估计:需要注意的是,当系统噪声和观测噪声的统计特性已知时,PF的估计性能要优于CRPF,因为CRPF没有充分利用噪声的统计特性;对于系统噪声和观测噪声的统计特性未知的情形,PF只能假设噪声服从某种分布才能应用,如果假设的噪声分布与真实分布不同,会导致其估计性能明显恶化,不同的是,CRPF的估计性能不受统计特性的影响,因此这种情况下CRPF的估计性能要优于PF.不同于式(3)中的状态估计问题,信号检测问题可以简化为二元假设问题:不同噪声条件下,检测问题的分析不同,具体分析如下.(1) 样假设wk的概率密度函数已知,状态xk也是已知的,系统噪声不存在,这种情况下,待测信号是确定的,表示为s=g(t;x1,x2,…,xK)=[h1(x1),h2(x2),…,hK(xK)]利用对数似然比检测信号,表示为(2) 当状态{x1,x2,…,xK}是未知的且由观测数据进行估计,其广义似然比(Generalized Likelihood Ratio Test,GLRT)检测可以表示为ξGLRT(Z)=状态可以通过Kalman滤波或PF估计.由于状态估计或跟踪需要在检测前完成,所以该算法成为检测前跟踪技术.(3) 当动态系统的统计特性未知的情况下,即系统噪声和观测噪声都是未知的,式(12)中TBD检测器无法工作,在H0和H1的假设下,需要利用观测数据的差值而不是概率密度的对数,即log(pk(zk))⟹-状态序列可以用CRPF估计因此,我们可以获得基于CRPF的检验统计量和对应的检测器其中,xk是目标真实状态为估计状态.式(15)就是针对动态系统中统计特性未知的信号检测问题设计的CRPF检测器,由K时刻的观测值Z可以计算出检验统计量,若超过门限T,则信号存在,否则信号不存在.由于系统噪声和观测噪声的统计特性未知,所以门限T必须经过Monte Carlo实验达到要求的虚警概率.在以下几种特殊条件下,基于CRPF的TBD检测器是广义似然比GLRT检测器的扩展.当观测噪声在K时刻内是零均值且具有相同的协方差矩阵的复高斯白噪声矢量时,p=1的基于CRPF检测器就是GLRT检测器.在这种情形下当观测噪声是广义复高斯矢量,其形状参数v>0,标准差σw[10],p=v的CRPF检测器相当于GLRT检测器,这种条件下β(v)=,η(v)=将式(17)带入式(12),p=v的检验统计量ξCRPF正比于GLRT统计量.在很多粒子系统中,可以用广义高斯分布将噪声建模.当动态系统中的未知噪声经过广义复高斯处理并且取得相应的参数p,CRPF检测器可以达到接近于GLRT检测器的性能.事实上,由于噪声的统计特性未知,参数p可以经过多次实验后凭经验选取.虽然,在一些特殊情况下,p取特殊值的CRPF检测器的检验统计量与其GLRT的检验统计量相同,但是检验统计量得到的方法是不一样的.CRPF检测器是利用观测数据与估计值之间的差值,不需要噪声的统计信息,而似然比检测是基于二元假设H0和H1下估计的似然函数,需要已知噪声的统计模型.设目标状态为其转移模型为目标检测单个接收信号的二元假设为‖‖‖‖‖式(20)~式(22)构成了MIMO雷达基于CRPF的TBD检测器,MIMO雷达就可以对接收信号进行长时间的积累,从而实现在统计特性未知的情况下对机动弱目标的检测与跟踪.假设目标在1000×1000的二维平面内作机动运动,目标的初始位置为,速度为,K取值20,分布式MIMO雷达包含2个发射天线和3个接收天线.在给定的场景下,仿真产生MIMO雷达2×3个接收通道的信号.目标的运动模型文献[11,12]已给出,其中vk是零均值高斯白噪声,其协方差矩阵为在第一个实验中,设观测噪声为已知的零均值复高斯白噪声,对比CRPF检测器与文献[5,6]中的PF检测器.设观测噪声的方差为则接收信号的信噪比定义为文献[5]中给出了目标的存在概率,把存在概率的平均值作为检验统计量.三个检测器的虚警概率设为0.001,虚警概率的门限由100000次仅有观测噪声的Monte-Carlo实验决定,每个SNR值,进行1000次实验计算检测概率.图1是粒子数N=2000时三种检测器的检测概率随信噪比的变化情况,图2是SNR=5dB时,两种PF算法和本文算法跟踪效果图,图3是三种算法跟踪误差随信噪比的变化情况.由图1~图3可以看出,文献[6]中的粒子滤波器性能最好,p=1的CRPF检测器虽然没有利用噪声的统计特性,但其性能仍然接近于文献[6]中的粒子滤波器性能,文献[5]中的PF检测器性能最差,该算法优势在于计算复杂度小,粒子的选取依靠接收信号傅里叶频谱的峰值决定,这就造成其存在概率的平均值不一定是二元判决的最佳检验统计量.在第二个实验中,观测噪声为形状参数v=0.5的零均值广义复高斯随机数[13],假设噪声的统计特性未知.由于两个PF检测器需要噪声统计特性,本文假设噪声为零均值复高斯白噪声,方差由文献[14]中的绝对中位差估计器对时间序列傅里叶变换进行估计得到.CRPF检测器中检验统计量的参数p取值1,在实验一的条件下,三个检测器的检测跟踪性能如图4~图6.可以看出,由于CRPF检测器无需噪声统计特性,其性能最好,而两个PF检测器由于假设噪声的统计特性与真实噪声的统计特性不匹配,所以其检测性能明显下降,证明了CRPF检测器能够有效处理噪声统计特性未知的情况.从上文的分析可以看出,当p=v=0.5时,对于形状参数为0.5的广义高斯白噪声,CRPF检测器的性能最佳,因为此时CRPF检测器等同于GLRT检测器.对于统计特性未知的噪声,我们希望CRPF检测器对参数p不敏感.实验三验证了不同参数下CRPF检测器的检测性能.对于形状参数v=0.5的广义高斯噪声,当p=0.25,0.5,0.75,1,粒子数N=2000,虚警概率为0.001时检测性能如图7;当p=0.5,v=0.25,0.5,0.75,1时,检测性能结果如图7.由此可以看出,当p=v时,CRPF检测器才能实现最好的检测性能,当两者不匹配时,检测性能会下降,但这个损失在可承受范围内.这就说明拥有可调参数(如p=0.5或1)的CRPF检测器在形状参数v不可调的情况下仍能表现出很好的检测性能.在机动弱目标的检测过程中,由于回波信号中含有噪声、杂波、干扰等,很难对其进行建模,传统的粒子滤波性能将会大幅下降.鉴于此,本文提出了基于CRPF的TBD检测器,该算法无需噪声和杂波的统计特性,利用粒子代价进行目标状态估计.实验仿真证明,在噪声统计特性已知的情况下,CRPF检测器的检测性能接近于文献[6]中的PF检测器,噪声统计特性未知的情况下,CRPF检测器的检测性能明显优于PF检测器.【相关文献】[1] Zhou S,Liu H.Space-partition-based target detection for distributed MIMO radar[J].IEEE Trans Aero Electron Sys,2013,49:2717.[2] 杨少委,程婷,何子述.MIMO雷达搜索模式下的射频隐身算法[J].电子与信息学报,2014,36:1017.[3] Yu H B,Wang G H,Cao Q,et al.A fusion based particle filter TBD algorithm for dim targets[J].Chinese J Electron,2015,24:590.[4] Su H T,Wu T P,Liu H W,et al.Rao-blackwellised particle filter based trackbefore-detect algorithm[J].Signal Proc Let,2008,2:169.[5] Boers Y,Driessen H.A particle-filter-based detection scheme[J].IEEE Signal ProcLet,2003,10:300.[6] Ristic B,Arulampalam S,Gordon N.Beyond the kalman filter-particle filters for tracking applications[J].IEEE Trans Aero Electron Sys,2004,19:37.[7] 张睿敏,陈钟,李晓斌.多目标量化变分滤波贝叶斯WSN跟踪定位算法[J].四川大学学报:自然科学版,2015,52:1237.[8] 谢莉清,何腊梅.带等式状态约束的集合卡尔曼滤波算法[J].四川大学学报:自然科学版,2015,52:958.[9] Novey M,Adali T,Roy A.A complex generalized gaussian distribution-characterization,generation,and estimation[J].IEEE Trans Signal Proc,2010,58:1427. [10] Habtemariam B K,Tharmarasa R,Kirubarajan T.Multitarget track before detect with MIMO radars[C].Montana,USA:IEEE,2010.[11] Gu S,Li K,Ren X,et al.Antenna array design in mimo radar using nsk polynomial factorization algorithm[J].Int J Antenn Propag,2016,2016:1.[12] Punithakumar K,Kirubarajan T,Sinha A.A sequential monte carlo probability hypothesis density algorithm for multitarget track-before-detect[J].Proc SPIE Int Soc Opt Eng,2005,5913:59131s.[13] Novey M,Adali T,Roy A.A complex generalized gaussian distribution-characterization,generation,and estimation[J].IEEE Trans Signal Proc,2010,58:1427. [14] Shui P L,Bao Z,Su H T.Nonparametric detection of fm signals using time-frequency ridge energy[J].IEEE Trans Signal Proc,2008,56:1749.。
跟踪制导雷达低空小目标检测技术研究摘要:低空强杂波对弱小目标遮蔽,影响跟踪制导雷达对小目标检测跟踪性能。
基于跟踪制导雷达常用多普勒闭环跟踪,适应性提出AMTI级联MDT算法以及杂波匹配抑止的AMDT算法,通过跟踪制导雷达低空隐身目标实测数据离散计算比较,验证了算法有效性。
关键字:跟踪制导雷达杂波抑止弱小目标AMTD1、引言空袭目标日趋隐身化发展,RCS成数量级下降,配合超低空突防策略,在视线距离受限和强杂波掩护下,突防能力大幅提升。
作为防空装备核心探测设备,低空强杂波下雷达对弱小目标探测一直研究热点。
目前,大多数一方面研究集中在微弱目标能量积累,如基于TBD技术[1]和Keystone算法[2]提高目标在长时间积累效率。
另一类方法主要是杂波处理方向,在强杂波认知建模下恒虚警算法改进[3],以及在目标速度未知以及杂波在零多普勒通道下的AMTI和MTD改进算法研究[4]。
通常地物海杂波在零多普勒附近,云雨杂波速度一般不超过雷达模糊速度,因此不考虑杂波多普勒模糊,根据杂波相关性计算求出杂波速度进行自适应杂波抑制。
这类方法多用于数据率较低的预警雷达和搜索雷达。
跟踪制导雷达是防空武器目标拦截关键设备,需完成多目标探测、火力制导(或引导)以及弹地通信等功能,常在固定时序模版下对多目标10Hz至50Hz高频率探测,为实现多目标拦截一般不进行长驻留回波积累,不对地面周期性扫描,无法使用杂波图等技术。
高频率探测为脉冲多普勒(PD)闭环跟踪奠定基础,可获得目标分辨、杂波抑制、干扰抑制和微动特征提取等优势,此外将目标多普勒频率补偿至零,可消除多普勒失配以及多普勒距离耦合误差。
但另一方面,多普勒闭环处理将使地杂波产生大频率偏移,常规AMTI将无法使用,当前主要通过加窗MDT处理抑制杂波副瓣对小目标影响,不利于强杂波环境下小目标稳定检测和多普勒域微动特征提取。
本文将多普勒闭环处理下AMTI和AMTD检测技术研究,提高跟踪制导雷达在强杂波环境下小目标检测性能。
基于深度学习的航空雷达目标检测与跟踪系统Introduction航空雷达目标检测与跟踪系统在航空交通管制、军事侦察、气象研究以及无人机导航等领域具有重要的应用价值。
随着深度学习技术的发展,基于深度学习的目标检测与跟踪方法成为了当前研究的热点。
本文将介绍一个基于深度学习的航空雷达目标检测与跟踪系统,并讨论其在航空领域中的潜在应用。
目标检测与跟踪方法深度学习的快速发展为目标检测与跟踪提供了先进的方法。
在航空雷达目标检测与跟踪系统中,常用的方法包括基于卷积神经网络(CNN)的目标检测与跟踪方法以及基于循环神经网络(RNN)的目标跟踪方法。
基于CNN的目标检测与跟踪方法通过对雷达图像进行特征提取和目标识别来实现目标检测和跟踪。
首先,利用卷积层和池化层对雷达图像进行特征提取,将其转化为一系列的特征图。
接着,通过全连接层和Softmax回归对特征图进行分类,以判断是否存在目标。
最后,使用非极大值抑制(NMS)算法对检测到的目标进行过滤和去重。
这样就可以实现目标检测。
而目标跟踪则可以通过将连续帧之间的特征进行匹配和对齐来实现。
与此同时,基于RNN的目标跟踪方法能够利用时间序列上的信息来提高目标跟踪的准确性。
这种方法通常将雷达序列数据输入到循环神经网络中,利用RNN的记忆机制对目标进行跟踪。
通过对雷达生成的序列数据建模和学习,系统能够有效地跟踪目标的位置和运动轨迹。
系统性能评估与应用展望航空雷达目标检测与跟踪系统的性能评估是验证系统效果的关键环节。
主要评估指标包括目标检测准确率、目标跟踪精度、系统响应速度等。
为了提高系统性能,可以采用数据增强、网络结构优化和多模态融合等方法。
基于深度学习的航空雷达目标检测与跟踪系统有广泛的应用前景。
首先,对于航空交通管制来说,可以利用该系统来实现对飞机、无人机等空中目标的实时监测与追踪,提高航班安全性。
其次,该系统在军事侦察方面的应用也有很大潜力,可用于目标识别、情报收集等任务。
基于雷达数据的目标识别与跟踪技术研究目标识别与跟踪技术在现代雷达应用中扮演着至关重要的角色。
通过准确地识别和跟踪目标,雷达系统能够提供关键的信息,用于军事、民用和科研等领域。
本文将讨论基于雷达数据的目标识别与跟踪技术的研究进展和应用。
一、目标识别技术研究目标识别是雷达中的一个关键任务,旨在将雷达数据转化为可理解的目标信息。
目标识别技术可以通过提取目标的特征来实现,例如目标的形状、尺寸、运动模式等。
1.1 特征提取技术特征提取是目标识别的核心环节。
雷达数据中的目标特征包括雷达散射截面、速度、加速度、运动方向等。
通过分析目标的散射特性和运动状态,可以有效地区分目标与背景杂波,从而实现目标识别。
1.2 机器学习方法机器学习在目标识别技术中扮演着重要的角色。
通过对大量的雷达数据进行训练和学习,可以构建有效的分类模型,实现目标的自动识别。
常用的机器学习算法包括支持向量机(SVM)、人工神经网络(ANN)和决策树等。
二、目标跟踪技术研究目标跟踪是指通过连续观测,估计目标的位置、速度和方向等参数的技术。
在雷达应用中,目标跟踪技术被广泛用于跟踪移动目标,如飞机、船只和车辆等。
2.1 滤波器方法滤波器方法是目标跟踪中常用的技术之一。
常见的滤波器包括卡尔曼滤波器、粒子滤波器和扩展卡尔曼滤波器等。
这些滤波器通过观测数据和状态方程来预测和更新目标的状态,从而实现目标跟踪。
2.2 轨迹关联方法轨迹关联是在多个雷达观测周期内识别和关联目标的独立轨迹的技术。
轨迹关联方法可以通过分析目标的运动模式、速度差异和相对距离等参数,实现目标的跟踪和关联。
三、目标识别与跟踪技术的应用目标识别与跟踪技术在军事、民用和科研等领域有着广泛的应用。
3.1 军事应用在军事领域,目标识别与跟踪技术被广泛用于军事侦察、目标导航和作战决策等方面。
通过实时准确地识别和跟踪敌方目标,可提供关键的情报支持,增强军事作战的效能和胜算。
3.2 民用应用在民用领域,目标识别与跟踪技术被应用于雷达气象、交通监控和智能驾驶等方面。
基于雷达数据的目标识别与跟踪算法研究近年来,随着无人驾驶技术的迅速发展,基于雷达数据的目标识别与跟踪算法成为关注的热点之一。
雷达技术以其在各种天气条件下的高分辨率、长距离探测等特点,在自动驾驶、智能交通等领域具有广阔的应用前景。
本文将对基于雷达数据的目标识别与跟踪算法进行研究,并探讨其在无人驾驶领域的应用。
目标识别是自动驾驶系统中的关键环节之一,它通过对雷达数据的分析和处理,识别出道路上的车辆、行人等目标物体。
传统的目标识别算法主要基于传感器融合的方法,将多种传感器的数据进行融合处理,从而提高目标检测的准确性和鲁棒性。
然而,传统算法存在着计算复杂度高、实时性差等缺点。
因此,近年来,越来越多的研究者转向基于雷达数据单独进行目标识别的方法。
基于雷达数据的目标识别算法主要分为两大类:基于特征提取和基于深度学习。
基于特征提取的方法主要通过提取目标物体的形状和纹理特征来进行识别。
例如,HOG(Histogramof Oriented Gradients)算法可以提取目标物体的轮廓特征,在目标识别中取得了较好的效果。
此外,SVM(Support Vector Machine)也是一种常用的目标识别方法,它可以通过学习样本数据,构建分类器来实现目标识别。
然而,基于特征提取的方法受限于特征的选择和提取过程,容易受到噪声和复杂背景的干扰。
为了克服这些问题,近年来基于深度学习的目标识别算法得到了广泛应用。
深度学习算法通过构建深层神经网络,可以自动学习目标物体的特征表示,并具有较强的鲁棒性和泛化能力。
例如,基于卷积神经网络(CNN)的目标识别算法可以根据输入的雷达数据,输出目标物体的类别和位置信息。
此外,目标检测算法如YOLO (You Only Look Once)和Faster R-CNN(Region-based Convolutional Neural Network)等也广泛应用于基于雷达数据的目标识别中。
LabVIEW与雷达技术实现目标检测与跟踪LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种图形化编程环境,它被广泛应用于各种科学研究领域和工业控制系统中。
而雷达技术是一种利用电磁波进行目标检测与跟踪的技术。
本文将探讨如何使用LabVIEW与雷达技术实现目标检测与跟踪功能。
1. 简介雷达技术是指利用电磁波的反射和传播特性来探测、识别和追踪目标的一种技术。
它广泛应用于军事、民用航空、气象、交通等领域。
LabVIEW是国际上一种常用的图形化编程环境,它提供了丰富的工具和函数库,使得开发者能够快速构建各种应用。
2. LabVIEW中的雷达控制在LabVIEW中,我们可以通过使用DAQ(数据采集)卡或者其他硬件设备来控制雷达的发射和接收,以及数据的采集和处理。
通过LabVIEW中的图形化界面,我们可以轻松配置和控制雷达系统的各个参数。
3. 目标检测目标检测是指在雷达回波数据中准确地识别和定位目标。
LabVIEW 中提供了多种信号处理函数和工具,可以对雷达回波信号进行滤波、去噪和分析。
通过合适的算法和参数设置,我们可以有效地在回波信号中检测出目标的存在。
4. 目标跟踪目标跟踪是指在雷达回波数据中实时追踪目标的位置和运动轨迹。
LabVIEW中可以使用Kalman滤波器等算法实现目标的跟踪。
通过实时采集雷达数据并进行处理,我们可以获取目标的位置信息,并进行轨迹预测和目标预警等功能。
5. 实时显示与分析LabVIEW提供了丰富的图形化界面和数据可视化功能,可以实时显示和分析雷达回波数据。
通过合适的图表、曲线和指示器等工具,我们可以直观地观察到目标的位置、速度和距离等信息。
这对于实时监控和决策提供了有力的支持。
6. 算法优化与性能改进LabVIEW中的模块化设计和可编辑性使得算法优化和性能改进变得更加方便。
我们可以通过调整参数、改进算法和优化代码等方式来提高目标检测和跟踪的准确性和实时性。
基于雷达技术的目标跟踪与识别系统设计随着现代社会的不断发展,无人机技术逐渐成熟,其应用范围也越来越广泛。
随之而来的是无人机与目标跟踪技术的不断发展,人们对目标跟踪与识别的需求也越来越高。
而基于雷达技术的目标跟踪与识别系统,正是满足这一需求的最佳选择。
一、系统概述基于雷达技术的目标跟踪与识别系统,是一种利用雷达技术实现对目标进行识别和跟踪的智能系统。
其主要原理是通过分析雷达信号,实现对目标圆周运动的观测与跟踪,并对目标所产生的雷达回波进行分析,提取目标特征信息,进而实现对目标的识别。
该系统由雷达发射和接收系统、目标跟踪模块、信号处理模块、目标识别模块、显示输出模块等组成。
其中,雷达发射和接收系统主要负责系统对目标进行雷达扫描;目标跟踪模块对雷达扫描信号进行处理,实现对目标的跟踪;信号处理模块对目标回波信号进行处理,进一步提取目标的信息;目标识别模块对目标进行特征提取和匹配,实现目标识别;显示输出模块将识别结果输出给用户。
二、系统设计1. 雷达发射和接收系统:系统的雷达发射和接收系统采用频率可调的脉冲压缩雷达,该雷达具有较高的分辨率和灵敏度,能够实现对目标进行精确测量和跟踪。
此外,增加自适应阵列天线,可以实现多角度观测和多目标跟踪,进一步提高系统的性能。
2. 目标跟踪模块:目标跟踪模块采用常规的跟踪算法,如卡尔曼滤波等,实现对目标的实时跟踪和预测,提高系统的实时性和准确度。
同时,根据实际需求和系统性能,可灵活选择不同的跟踪算法进行优化和改进。
3. 信号处理模块:信号处理模块主要负责对接收信号进行解调、滤波、增益等处理,提取目标回波信号的特征信息,如距离、速度、角度等。
此外,通过应用波束形成技术,可以对目标信号进行有效的提取和分离,进一步提高系统的鲁棒性和识别能力。
4. 目标识别模块:目标识别模块通过对目标的特征进行提取和匹配,实现对目标的识别。
在目标特征提取方面,可采用传统的特征提取方法,如傅里叶变换、小波变换等,也可以采用深度学习等先进方法,以提高目标识别的准确率和鲁棒性。
复杂场景下雷达目标检测与跟踪算法研究复杂场景下雷达目标检测与跟踪算法研究摘要:雷达目标检测与跟踪在当今复杂场景下的应用范围越来越广泛。
本文基于深度学习与传统算法相结合的思路,对复杂场景下雷达目标检测与跟踪算法进行了研究和探讨。
首先,我们回顾了雷达目标检测与跟踪的基本概念与技术,并介绍了复杂场景下的挑战与难点。
接着,提出了一种基于深度学习的目标检测算法,通过训练一个深度神经网络模型来实现目标检测。
实验结果表明,该算法在复杂场景下能够有效地检测并跟踪目标。
最后,我们对结果进行了总结和展望,并探讨了未来的研究方向。
关键词:雷达、目标检测、目标跟踪、复杂场景、深度学习1. 引言雷达目标检测与跟踪在军事、交通、航空航天等领域中具有重要的应用价值。
然而,由于复杂场景的存在,传统的雷达目标检测与跟踪算法在实际应用中面临着一些挑战与难点。
本文旨在研究和探讨在复杂场景下的雷达目标检测与跟踪算法,以提高其在实际应用中的性能。
2. 雷达目标检测与跟踪的基本概念与技术雷达目标检测与跟踪主要包括两个部分:目标检测和目标跟踪。
目标检测是在雷达数据中找出目标的位置与类别信息,而目标跟踪是通过连续的雷达数据帧来追踪目标的运动情况。
传统的雷达目标检测与跟踪算法主要基于特征工程方法,通过设计有效的特征提取和分类算法来实现目标检测与跟踪。
然而,特征工程方法往往需要人工设计特征,其性能受到特征的选择和优化方式的限制。
3. 复杂场景下的挑战与难点在复杂场景下,雷达目标检测与跟踪面临着以下挑战与难点:一是目标的多样性。
复杂场景中目标的形状、大小、运动模式等具有较大的变化,使得目标检测与跟踪算法需要具有较强的泛化能力。
二是背景的干扰。
复杂场景中可能存在大量的背景干扰物,如树木、建筑物等,它们可能会被错认为目标,从而造成误检测。
三是数据的稀疏性。
在复杂场景中,雷达数据的采样点可能较少,从而影响对目标的检测与跟踪。
4. 基于深度学习的目标检测算法为了解决复杂场景下的目标检测与跟踪问题,我们提出了一种基于深度学习的目标检测算法。
基于雷达技术的目标识别与跟踪系统设计在现代社会,雷达技术被广泛应用于军事、民用、航空航天等领域。
其中,雷达目标识别与跟踪系统是其中一个重要的组成部分。
雷达目标识别与跟踪系统的设计,可以帮助人们更准确地进行目标的监测、追踪和控制,提高了人类在各种领域中的管理和应用水平。
一、雷达技术的原理雷达是一种利用电波来探测目标位置和运动状态的技术。
雷达系统通过向目标发射连续或间歇的电磁波,然后接收反射回来的信号,并对其进行处理,从而获得目标的位置、运动速度等信息。
雷达的核心是收发设备和信号处理系统,其中收发设备主要包括雷达天线、发射机和接收机等。
二、雷达目标识别技术雷达目标的识别是指通过对目标反射回来的信号特征进行分析和处理,从而判断目标的种类及其特征。
目标识别技术的目标是实现对目标情况的准确分析和对目标种类的自动判断。
在雷达目标识别中,常用的方法有SAR成像、HRR特征识别、频谱分析等。
其中,SAR(合成孔径雷达)具有对地面目标进行成像、探测以及识别的能力。
HRR(高分辨率雷达)技术可以获得高质量的目标特征数据,进而实现目标的识别。
三、雷达目标跟踪技术雷达目标跟踪是指系统能够对目标的位置、速度等参数进行实时检测,从而对其进行追踪。
目标跟踪技术是雷达技术应用的重要组成部分,主要是通过对目标的位置和运动状态进行实时分析和计算,来实现目标的跟踪。
在实际应用中,经常采用的目标跟踪算法有传统卡尔曼滤波、扩展卡尔曼滤波、粒子滤波和平滑滤波等。
四、基于雷达技术的目标识别与跟踪系统设计基于雷达技术的目标识别与跟踪系统设计的目的是能够快速且准确地识别和跟踪目标,为后续的分析和决策提供有效的数据支持。
该系统主要由雷达设备、数据采集与处理模块、目标识别算法模块和目标跟踪算法模块等组成。
1.雷达设备部分,主要是对雷达设备进行选型和配置。
针对不同类型的目标,需要选择不同类型的雷达设备。
同时,也需要考虑设备性能、探测距离、探测精度等因素,选择合适的雷达设备。
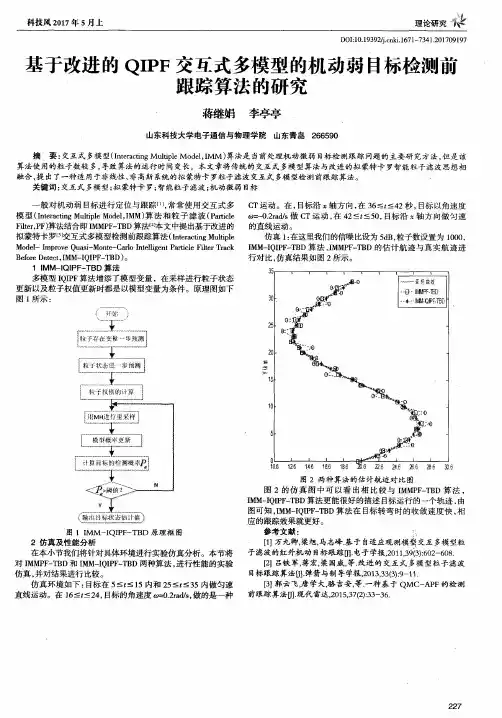
VD1.38.No.9 Sep,2013 火力与指挥控制
FireControl&CommandControl 第38卷第9期
2013年9月
文章编号:1002—0640(2013)09-0062-05
交互MCMC—PF的雷达弱小目标检测与跟踪
曹晓英t-一,张智军 ,向建军,,肖冰松’ (1.空军工程大学航空航天工程学院,西安710038;2.空军第二飞行学院,陕西户县710306)
摘要:针对复杂背景下雷达弱小目标的检测和跟踪问题,提出了一种改进粒子滤波的检测前跟踪算法。该方法 在粒子滤波重采样阶段后,采用交互MCMC移动更新策略,充分结合粒子的自身历史信息和其他粒子信息,克服了 粒子贫化问题,加快了算法收敛速度。通过在雷达回波距离一多普勒数据上,建立粒子滤波模型,并进行实验仿真, 结果表明改进算法提高了雷达弱小目标的检测概率,跟踪误差小。 关键词:粒子滤波,检测前跟踪,雷达弱小目标,马尔科夫链一蒙特卡罗 中图分类号:TN957 文献标识码:A
Tracking and Detecting for Radar Weak Target Based on Interacting MCMC-Particle Filter Algorithm
CAO Xiao-ying ,ZHANG Zhi-jun ,XIANG Jian-jun ,XIAO Bing-song (1.School ofAeronautics andAstronautics Engineering,Air Force Engineering University,Xi’an 710038,China; 2.The Second Flight Academy OfAir Force,Hu’xian 710306,China)
Abstract:Aimed at the problem of the detection and tracking of radar weak targets under complex environments,an improved track-before-detect algorithm is introduced based on particle filter.The Interacting MCMC move step is performed after resampling particles,this refresh strategy can avoid sample impoverishment and accelerate the algorithm convergence rate via move each particle based on both its history information and the information from other particles.Establish model of particle filter based on radar echo range-doppler date and simulation,the results demonstrate that the improved algorithm can enhance the probability of detecting radar weak target,and obtain low tracking error. Key words:particle filter,track-before-detect,radar weak target,Markov chain Monte Carlo
引 言 强杂波背景下雷达弱小目标的检测和跟踪是 雷达信号处理系统的关键技术之一。近年来,随着 现代军事科技的发展,隐身飞机、巡航导弹、无人机 等大量装备部队,此类目标威胁大,雷达截面积 (RCS)dx,雷达回波信噪比低,严重地制约了目标的 有效检测与跟踪。检测前跟踪(Track—before—detect。 TBD)技术作为一种低信噪比下检测跟踪弱小目标 的有效方法得到了广泛应用。目前理论上用于雷达 目标检测的TBD方法主要有:Hough变换[3-4]、动 态规划[ ]、粒子滤波[7-8]等方法。其中,Hough变换 法对匀速直线运动的目标具有良好的检测性能,但 计算量较大;动态规划法能在低信噪比下检测各种 运动形式的目标,但跟踪性能不足;而基于粒子滤 波的递归TBD方法,适合对隐藏于距离一多普勒数 据中的非线性非高斯目标的进行滤波处理,通过整 合目标检测和跟踪过程,有效实现对雷达弱小目标 的探测。但在实际应用中,采用粒子滤波处理,经常 会出现严重的粒子退化现象[9],增加粒子数和重采 样技术[1。]可以有效抑制粒子退化,但会降低粒子多 样性,造成计算量较大,不利于实时处理。
收稿日期:2012-08—11 修回日期:2012-09—23 ¥基金项目:陕西省电子信息系统综合集成重点实验室基金资助项目(201107Y03) 作者简介:曹晓英(1985-),男,湖北通山人 硕士研究生。研究方向:雷达信号与信息处理。
・62・ 曹晓英,等:交互MCMC—PF的雷达弱小目标检测与跟踪 (总第38—1513) 本文针对粒子滤波过程中存在的粒子退化和 贫化现象,提出了一种IMCMC—PF(Interacting MCMC—Psmicle Filter)滤波方法。该方法通过在重采 样过程中修正了传统MCMC[11](Markov Chain Monte Carlo)方法粒子独立移动的缺点,充分结合粒 子的自身历史信息和其他粒子信息对粒子集进行 更新,使粒子更快地向高似然区域移动,加快了收 敛速度,有效保持了采样粒子集的多样性,抑制粒 子退化。
1 系统模型的建立 1.1 目标运动模型 由于雷达的原始观测数据通常用雷达回波的 距离一多普勒图进行表示,可以将目标状态向量定
义为X =Ix ,x ,yk, , ],其中( )、( , )和h 分别表示第k帧距离一多普勒数据中目标的位置、 速度和强度状态信息。目标运动模型描述为 Xk= 一.+ 一。 (1)
其中F为状态转移矩阵,设雷达相参积累时间为 , 则F定义为:
F= 1 r 0 0 0 0 1 0 0 0 0 O 1 0 O 0 0 1 O 0 0 O 0 1
Wk为过程噪声,其协方差矩阵如下:
T2 0 0 0 3 2
导7’ o 0 o
Q=10 0 I l0 0 J 1 0 0
(2) (3) q。、q:分别表示目标运动状态和强度的过程噪声 级。为了表示监视区域目标的存在性,引人变量
。Ek∈{0,1},0表示目标不存在,1表示目标存在。 由此定义目标出现概率P6和死亡概率 分别为 :P{ =1I 一 =0}、 :P{ =0l巨一。=l} 其状态转移矩阵为二阶马尔科夫链H: I-t—D D ] 兀=l IP .1二 I(4) L—a ‘ ‘ J
定义目标的初始存在概率/.t。=P{巨=lie知量。 1.2目标观测模型 为简化问题,只考虑一个方位单元,以回波信号
的距离一多普勒l 作为雷达原始观测数据 12]。每一 帧图像共有Ⅳr×Nd个分辨单元(包括Ⅳ,个距离单 元和 个多普勒单元)。假设雷达在相同扫描区域 产生多帧距离一多普勒图,则在第k时刻分辨单元 ( √)的雷达观测能量数据用 表示为: =l I ,k∈ Ⅳ,则k时刻完整的观测数据集合表示为z^=
,i=1,…,k}。Z~(i,J)表示目标的复幅度观测数据, 可定义为
z ’={ ‘力 + ≥ 1 c5
’ )为服从(0, :)分布的观测噪声, =Ake,h ̄,其中 ∈(0,2Ir)为目标的复幅度,噬 力( )为距离一多 普勒分辨单元( , )的回波形式可以描述为:
p{_ }(6)
i=1,...,Ⅳ,,J=1,..., ,k∈N。R、D为与距离、多 普勒单元尺寸相关的常数; 、 为损耗常数;rk、巩
分别为k时刻目标的距离和多普勒值 =√《+ 、 1 ( + )在目标信号强度 已知的
情况下,目标信噪比计算式为SNR=10log【轰j(dB), I = 。 1.3目标模型的似然函数 根据中心极限定理,观测数据中的背景噪声 服从独立零均值的复高斯分布,假设其方差为 :。 由文献[13]可知,当 =0时,目标不存在,仅存在背 景噪声,观测数据服从瑞利分布;当Ek=1时,目标存 在,观测数据由目标幅度和背景噪声叠加而成服从 莱斯分布,相应的似然函数表达式为:
, I I Xl,E ̄=0): e 2o2 (7) I, I: : p( IlXk,E =1)= e ×
, ∽( J]I—— —l
,0(。)表示零阶修正贝塞尔函数。 假设目标为点目标,由于目标位于坐标(瓤, ) 时,一般只能对该坐标临近分辨单元的信号强度产生 影响。因此,可将似然函数p(z l , )近似描述为:
・63・
0 o n )2 0
r ●。 2 o