一种永磁同步电机转子初始位置的判断方法
- 格式:doc
- 大小:2.86 MB
- 文档页数:11
永磁同步电机初始磁极位置检测方法胡庆波;张荣;管冰蕾;何金保;孔中华【摘要】根据永磁同步电机相电感的饱和效应,提出了一种恒压源作用下的相电流响应来获得电机初始磁极位置的检测方法,并针对制动器打开瞬间容易出现因磁极位置不准而造成无法定位的问题,对位能性负载提出了一种基于位置环的快速定位法.该方法根据电机实际转动的角度来反向移动给定电流矢量,实现快速定位.最后通过计算不同幅值电流矢量二次定位转过的角度来获得精确的磁极位置.所提方法能够准确获得电机初始磁极位置,可适用于不同类型的永磁电机.实验证明:该控制方法结构简单,易于数字控制实现,同时具有较强的通用性和鲁棒性.【期刊名称】《电力自动化设备》【年(卷),期】2019(039)005【总页数】7页(P194-200)【关键词】永磁同步电机;电感饱和效应;磁极初始位置;空间电压矢量;位置环【作者】胡庆波;张荣;管冰蕾;何金保;孔中华【作者单位】宁波工程学院电信学院,浙江宁波315211;宁波海天驱动有限公司,浙江宁波315801;宁波工程学院电信学院,浙江宁波315211;宁波工程学院电信学院,浙江宁波315211;宁波工程学院电信学院,浙江宁波315211【正文语种】中文【中图分类】TM341;TM3510 引言目前实现高性能的永磁同步电机调速需要获得精确的转子磁极位置。
而绝对值编码器由于存在成本偏高、体积较大等问题使其应用受限,现有控制系统中一般偏向于采用增量式或旋转变压器的速度反馈方式。
在采用增量式编码器的永磁同步电机系统中,一旦编码器安装在电机轴上,其编码器零位,即Z脉冲信号产生位置与电机转子磁极位置相对固定。
控制系统需要预先知道两者的角度差,以便在出现Z脉冲时对转子磁极位置进行校正。
该角度值在首次运行前通常需要采用电机初始磁极位置自学习的方法来获得。
对于永磁同步电机的初始磁极位置检测,主要可分为脉冲电压法和高频注入法2类。
其中脉冲电压法[1-3]利用电机磁路的饱和特性,通过对电机注入脉冲电压矢量,并采集其相电流响应来搜索电机的转子位置。
转子磁钢表贴式永磁同步电机转子初始位置检测发表时间:2017-06-28T16:09:15.350Z 来源:《电力设备》2017年第7期作者:吴炽海[导读] 摘要:文章重点解析了应用带有U、V、W相的复合式光电编码器,去检测转子磁钢表贴式永磁同步电机(SPMSM)转子初始位置的原理与流程。
(上海中科深江电动车辆有限公司上海市嘉定区 201800)摘要:文章重点解析了应用带有U、V、W相的复合式光电编码器,去检测转子磁钢表贴式永磁同步电机(SPMSM)转子初始位置的原理与流程。
实践证明这一新兴检测技术的应用是对传统检测方法算法执行周期漫长与繁琐等缺陷的弥补,这一技术的应用在检测SPMSM 转子初始位置领域中的应用体现出快捷性与精确性特征,希望这一检测技术在后续的发展中得到更大的应用空间。
关键词:永磁同步电机;光电编码器;初始位置;检测方法国际上现存的文献资料多数是介绍在相关软件的协助下对永磁同步电机转子位置进行检测,与转子初始位置检测相关的研究少之又少。
实质上,转子初始位置检测是构成传感器调速体系的关键要素,若该环节存在错差,将会干扰转子位置计算的精确性,为精确型电机管控的系列计算结果的产出设置障碍,最终干扰电机运行的有序性。
基于此,本文探究复合式光电编码器在磁钢表贴式永磁同步电机转子初始位置检测进程中的具体应用。
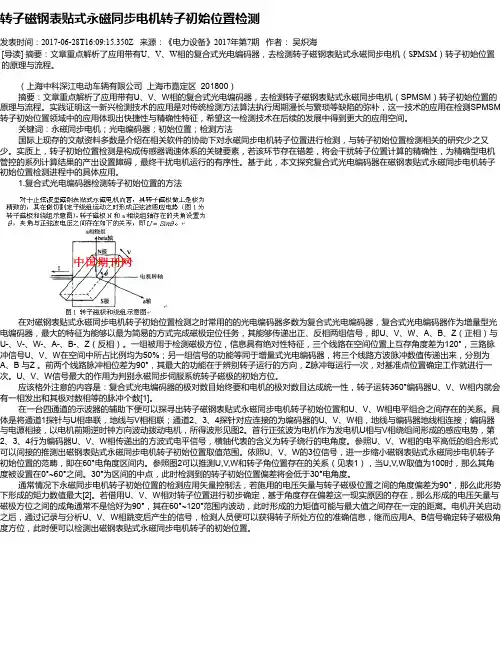
1.复合式光电编码器检测转子初始位置的方法在对磁钢表贴式永磁同步电机转子初始位置检测之时常用的的光电编码器多数为复合式光电编码器,复合式光电编码器作为增量型光电编码器,最大的特征为能够以最为简易的方式完成磁极定位任务,其能够传递出正、反相两组信号,即U、V、W、A、B、Z(正相)与U-、V-、W-、A-、B-、Z(反相)。
一组被用于检测磁极方位,信息具有绝对性特征,三个线路在空间位置上互存角度差为120°,三路脉冲信号U、V、W在空间中所占比例均为50%;另一组信号的功能等同于增量式光电编码器,将三个线路方波脉冲数值传递出来,分别为A、B 与Z 。

1一种交流永磁同步电机控制首次上电时转子的定位方法,在电机转子上安装普通编码器,用普通编码器输出A、B脉冲的数量来表征转子位置的变化;其特征为:同时在电机制造时预先安装转子磁极位置的感应霍尔元件并配备标准的增量式编码器,或者安装配套带有U、V、W信号的增量式编码器;霍尔元件或编码器送出的U、V、W状态信号,共有六个电平状态,101、100、110、010、011、001,表征电机转子电角度位置的为六个等距区间,每个区间60度电角度;在初始上电时刻,通过增量式编码器发出的U、V、W 信号状态,确定电机转子磁场矢量初始位置所处的区间,取该区间的中点作为转子磁场矢量位置,控制器以此作为转子初始位置向定子三相绕组输出电流;转子运转跨过了电角度区间时,U、V、W状态发生第一次变化,控制器立即根据U、V、W状态的变化对转子进行准确定位,并继而根据编码器送出的A、B脉冲信号进行转子准确定位,开始正式运行。
本发明的交流永磁同步电机控制系统首次上电时转子的定位方法,在转子上安装普通编码器,同时预装可发U、V、W信号的霍尔元件或增量式编码器。
U、V、W信号将转子位置电角度分为六个60°电角度的区间,在初始上电时,通过U、V、W信号状态,确定转子磁场矢量区间,取该区间的中点作为转子磁场矢量位置,控制器向定子三相绕组输出电流。
其误差最大只有30度电角度。
转子运转跨过区间时U、V、W状态发生第一次变化,即可立即对转子进行准确定位,开始正式运行。
装置方法简单有效,保证在控制器过载能力范围内正常启动运行;系统正常运行后,每经过60度电角度,系统均对转子的位置校核,避免在运行过程中的定位错误。
2.用带UVW换向信号的光电式编码器确定转子初始位置方法:1)通过吸d轴(d轴与A相绕组重合)确定d轴的位置;2)找到d轴位置后,可以确定UVW的磁状态以及确定角度区间;控制器向定子三相绕组输出电流,转子运转跨过了电角度区间时,U、V、W状态发生第一次变化,记录运行的脉冲,根据当前U、V、W状态对应的角度可以确定d轴位置与UVW对应的角度;3)系统上电后通过U、V、W信号状态,确定转子磁场矢量区间,取该区间的中点作为转子磁场矢量位置,控制器向定子三相绕组输出电流。
工学硕士学位论文永磁同步电机转子初始位置估计 INITIAL ROTOR POSITION ESTIMATION FOR PMSM胡任之哈尔滨工业大学2008年7月国内图书分类号:TM351国际图书分类号:470.40工学硕士学位论文永磁同步电机转子初始位置估计硕士研究生:胡任之导师:邹继斌 教授申请学位:工学硕士学科、专业:电机与电器所在单位:电气工程系答辩日期:2008年7月授予学位单位:哈尔滨工业大学Classified Index:TM351U.D.C.: 470.40Dissertation for the Master Degree in Engineering INITIAL ROTOR POSITION ESTIMATIONFOR PMSMCandidate:Hu RenzhiSupervisor:Prof. Zou JibinAcademic Degree Applied for:Master of Engineering Specialty:Electrical Machine and Apparatus Affiliation:Dept. of Electrical Engineering Date of Defence:July, 2008Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文摘要永磁同步电机(PMSM)具有高效率、高功率密度、控制性能好、启动特性好等优点。
然而转子初始位置的准确检测是PMSM可靠启动的必要保证。
转子初始位置偏差将引起电机启动电流过大,甚至会造成电机过流或发生反转,负载较大时情况更加严重。
本文针对PMSM的转子初始位置估计的问题进行了深入的研究。
基于转子预定位的PMSM初始位置估计是一种常用的方法。
本文分析了转子预定位法的原理和初始位置估计精度的影响因素,采用了电流闭环的转子预定位方法,并提出平均值法来克服摩擦力引起的初始位置估计误差。
永磁电机初始位置角永磁电机是以永磁体为励磁源,具有高效、高精度等优点,广泛应用于各种领域。
其中,永磁同步电机和永磁直流电机都需要通过控制电机的角度来实现运动控制。
而了解永磁电机的初始位置角则是进行控制的基础。
永磁电机的结构与工作原理永磁电机是一种电气机械设备,它以永磁体为励磁源,将电能转化为机械能,并驱动负载运动。
永磁电机具有简单、结构紧凑、体积小、效率高、响应快等优点,广泛应用于工业、家电、交通等领域。
永磁电机主要包括永磁同步电机和永磁直流电机。
永磁同步电机采用永磁体产生磁场,通过外界的交流电源提供与转子磁场同步的三相交流电信号来实现转子转动。
而永磁直流电机则通过永磁体创建磁场,以直流电源作为控制信号来实现转子的转动。
永磁电机的转动原理是利用电机转子与电磁场之间的相互作用,使电机产生力矩来驱动负载旋转。
永磁电机的转子由永磁体和钢芯组成,通过轴承支撑,与电机的定子形成空气隙。
永磁同步电机的定子是由三相绕组组成的,当外界交流电源提供给定子绕组一定的交流电信号时,就会在定子内产生一个交流磁场。
当转子的永磁体绕组与定子的交流磁场同步时,就会产生一个旋转力矩,使转子开始运动。
永磁电机的控制需要了解电机的初始位置角。
初始位置角是指,在控制系统开始运行时,电机转子的位置相对于定子的位置所在的角度。
在永磁电机控制中,初始位置角起到非常关键的作用。
初始位置角的确定需要通过传感器或计算得出。
传感器通常采用霍尔传感器或编码器。
在永磁同步电机中,初始位置角通常通过霍尔传感器来实现。
在转子绕组上安装霍尔传感器,可以检测转子所处的磁场位置,从而确定初始位置角。
而在永磁直流电机中,则通常使用编码器来检测初始位置角。
初始位置角的值是一个固定的量,一旦确定,就可以用来进行电机控制。
在永磁电机控制中,初始位置角一般用来进行定位和角度估算。
通过检测电机的初始位置角,可以将电机控制信号和电机旋转信号同步,从而实现电机的控制。

永磁同步电机转子初始位置检测方法何鑫;李明勇;高跃【摘要】使用增量式编码器关键在于确定转子的初始位置.本文基于永磁同步电机数学模型,提出了一种转子初始位置定位方法.该方法采用二分法选择电流矢量试探角度,根据转子转动方向不断缩小初始位置范围.实验结果表明,该方法能迅速准确完成转子初始位置定位.【期刊名称】《船电技术》【年(卷),期】2015(035)002【总页数】4页(P77-80)【关键词】永磁同步电机;转子初始位置;增量式编码器【作者】何鑫;李明勇;高跃【作者单位】武汉船用电力推进装置研究所,武汉430064;武汉船用电力推进装置研究所,武汉430064;武汉船用电力推进装置研究所,武汉430064【正文语种】中文【中图分类】TM3510 引言永磁电机控制方案一般采用经典的转速、电流双闭环矢量控制系统,矢量控制闭环依赖于电机的转子位置信息。
转子位置信息通常通过安装在永磁电机上的增量式光电编码器来获得,使用增量式编码器关键在于确定DSP控制程序中光电脉冲计数器的基准值,即转子的初始位置。
在采用增量式光电编码器的控制系统中,为确定转子的初始位置,常用的方法是给定一个方向固定的电流矢量,将电机转子磁极强行拉到给定位置,这种方法实现简单,但定位过程中转子会产生较大扭动,在某些要求转子不动的特殊的应用场合该方法并不适用[1,2];一些学者采用高频注入法来检测初始位置,但需要额外设计滤波器和解析位置信息算法,实现起来比较复杂[6,8];也有学者利用电机的磁饱和特性来检测转子的初始位置,但这要依赖于电机本身的参数[4]。
本文提出了一种基于增量式光电编码器,采用二分法选择试探电流矢量角度,通过检测转子微动方向缩小转子初始位置范围,最终确定转子的初始位置的方法,并进行了实验验证。
1 永磁同步电机矢量控制原理永磁同步电机矢量控制原理图如图1所示,控制系统采用转速、电流双闭环控制,转速和坐标变换角度通过增量式光电编码器得到。
永磁同步电机零位初始角标定知乎
永磁同步电机的零位初始角标定是指确定永磁同步电机转子的一
个固定位置作为电机的起始位置,以便控制器对电机进行精确的控制。
具体步骤如下:
1. 将永磁同步电机的机械位置和电气位置进行对应。
一般情况下,机械位置是指电机转子上的某一点,而电气位置则是指电机内部
角度编码器的输出值。
2. 通过角度编码器的输出值确定永磁同步电机当前的机械位置。
3. 将电机控制器的输出信号与角度编码器的输出值进行对比,
找到一个电机转子位置与电气控制信号完全匹配的点。
4. 将该点作为永磁同步电机的零位初始角标定点,保存在控制
器中,以便后续的控制过程中进行精确的控制。
需要注意的是,在进行零位初始角标定时,需要保证电机转子处
于静止状态,避免因电机转子运动导致角度编码器输出值的误差。
内置式永磁同步电机转子初始位置估计方法王高林;杨荣峰;于泳;徐壮;徐殿国【期刊名称】《电机与控制学报》【年(卷),期】2010(014)006【摘要】针对无位置传感器永磁同步电机控制系统起动运行困难的问题,提出一种基于混合信号注入的内置式永磁同步电机改进转子磁极初始位置估计方法.采用注入高频旋转电压信号的方法检测磁极位置,设计一种通过PI跟踪观测器对所构建磁极位置误差信号进行控制的方案,当误差调节至零时将获得磁极位置初判值,降低了算法的复杂性.以磁极位置初判值为矢量角,往定子绕组注入2个方向相反的脉冲电压矢量,通过比较直轴电流大小可以简单、有效地判断出磁极极性,实现对位置初判值进行校正,从而获得转子初始位置估计值.应用所提出的估计方法对一台22kW内置式永磁同步电机进行实验,得到转子位置电角度平均估计误差为4.6°.【总页数】5页(P56-60)【作者】王高林;杨荣峰;于泳;徐壮;徐殿国【作者单位】哈尔滨工业大学,电气工程及自动化学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,电气工程及自动化学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,电气工程及自动化学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,电气工程及自动化学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,电气工程及自动化学院,黑龙江,哈尔滨,150001【正文语种】中文【中图分类】TM341【相关文献】1.内置式永磁同步电动机无传感器速度控制和转子初始位置估计方法的应用及实验研究 [J], M.;Boussak[突尼斯];许俊峰(译者);王坚(校者)2.内置式永磁同步电机转子初始位置估计方法 [J], 何栋炜;彭侠夫;蒋学程;周结华3.基于改进无迹卡尔曼滤波的内置式\r永磁同步电机转子位置估计 [J], 马彦;李军伟;李德芳;孙海波;高松4.基于强跟踪无迹卡尔曼滤波的内置式永磁同步电机转子位置估计 [J], 马彦;李军伟;王琳;阚辉玉;孙宾宾;王冬5.基于高频信号耦合注入的内置式永磁同步电机转子初始位置检测方法 [J], 李新旻;陈伟;张国政;王志强;陈炜因版权原因,仅展示原文概要,查看原文内容请购买。
永磁同步电机零位初始角标定知乎
永磁同步电机零位初始角标定是电机控制中的一个重要环节,也是
电机启动的第一步。在进行永磁同步电机控制前,需要先对电机进
行零位初始角标定,以确保电机正常运行。
永磁同步电机是一种高效、节能、环保的电机,具有高转矩、高效
率、高功率密度等优点。它的控制方法有很多种,其中一种常见的
方法是矢量控制。在进行矢量控制前,需要先进行零位初始角标定。
零位初始角是指电机在启动前的一个固定位置,通常是电机的机械
零位,也就是转子的初始位置。在进行角度控制时,需要以零位初
始角作为参考点,控制电机的转动角度。因此,准确确定零位初始
角对于电机的正常运行至关重要。
永磁同步电机零位初始角标定的方法有很多种,其中比较常见的是
基于霍尔传感器的方法。霍尔传感器是一种能够检测磁场的传感器,
可以用来检测永磁同步电机转子的位置。通过将多个霍尔传感器安
装在电机的定子上,可以检测电机转子的位置,并确定零位初始角。
在进行零位初始角标定时,首先需要将电机旋转到机械零位,并记
录下来。然后,通过霍尔传感器检测电机转子的位置,确定电机的
电气零位。最后,将机械零位和电气零位进行对齐,即可确定电机
的零位初始角。
除了基于霍尔传感器的方法外,还有其他一些方法可以用于永磁同
步电机零位初始角标定,例如基于编码器的方法、基于光电传感器
的方法等。不同的方法有各自的优缺点,需要根据实际情况选择合
适的方法。
永磁同步电机零位初始角标定是电机控制中的一个重要环节,需要
在电机启动前进行。准确确定电机的零位初始角可以保证电机正常
运行,提高电机控制的精度和稳定性。
一种永磁同步电机转子初始位置的判断方法1、一种永磁同步电机转子初始位置的判断方法,其特征在于包括如下步骤:(1)在ˆˆdq -估计同步旋转坐标系的ˆd 轴上注入高频电压信号ˆcos()d mh h uU t ω=,给定ˆq 轴电压ˆ0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到ˆˆdq -估计同步旋转坐标系的ˆq轴电流ˆq i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的ˆq轴电流ˆq i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到ˆq轴电流ˆq i 的幅值信号()f θ∆;最后,对该幅值信号()f θ∆进行PI 调节,得到估计转速ˆω,对估计转速ˆω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计的转子位置ˆfirstθ; (4)在ˆˆdq -估计同步旋转坐标系的ˆd 轴上注入高频电压信号ˆcos()d mh h uU t ω=,在ˆq 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>;(5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收敛的磁极极性为N 极,转子初始位置ˆˆ=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置ˆˆ=initial firstθθπ+。
2、如权利要求1所述的一种永磁同步电机转子初始位置的判断方法,其特征在于:所述步骤(1)中,采用转子的估计位置ˆθ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值ˆuα和ˆu β。
一种永磁同步电机转子初始位置的判断方法技术领域本发明属于永磁电机控制领域,特别涉及一种永磁同步电机转子初始位置的判断方法。
背景技术永磁同步电机无论是采用直接转矩控制还是矢量控制,都需要精确地获取转子的位置。
传统的检测电机转子位置和转速的方法中,多采用机械传感器,如光电编码器或者旋转变压器等,使得永磁同步电动机系统不能在一些环境恶劣的特殊场合里可靠地工作,如航天、水下及空调压缩机等领域。
因此,无位置传感器控制技术应运而生。
目前,无位置传感器控制技术根据基本原理可以分为两大类:一类基于电机反电势的基波模型,适用于中高速领域;另一类多为基于电机谐波模型,利用电机结构的物理特性或电感的饱和特性,适用于低速(零速)领域。
众所周知,后者的实现难度较前者要高,是无位置传感器技术的关键。
永磁同步电机分为凸极式和隐极式两种形式,转子磁钢表贴式永磁同步电机属于隐极式,其特点为:通常情况下,交轴和直轴电感近似相等,即q d L L =。
但有研究表明,在直轴上施加一定的励磁电流,随着电机磁路的饱和,会导致直轴电感变小,此时电机对外呈现出q d L L >,称为电感饱和凸极。
据此,韩国学者I. H. Jung 等提出了脉动高频电压信号注入法无位置传感器控制技术,在估计的同步旋转坐标系直轴上注入高频正弦电压信号,利用电机的凸极(表贴式为饱和凸极),使得估计的同步旋转坐标系交轴上产生了一个和估算位置误差相关的高频响应电流信号,设计位置估算系统,从该高频响应电流信号中获取转子位置。
在应用脉动高频电压信号注入法作转子初始位置检测时,估计位置既可能收敛于电机转子磁极的N 极,也有可能收敛于电机磁极的S 极,因此需要对估算转子初始位置的磁极极性进行判断。
发明内容本发明的目的,在于提供一种永磁同步电机转子初始位置的判断方法,其可解决脉振高频电压信号注入法检测转子初始位置时磁极极性的收敛问题,无需在直轴上注入正负方向的脉冲电流,可以有效地实现转子初始位置估算。
为了达成上述目的,本发明的解决方案是:一种永磁同步电机转子初始位置的判断方法,包括如下步骤:(1)在ˆˆdq -估计同步旋转坐标系的ˆd 轴上注入高频电压信号ˆcos()d mh h uU t ω=,给定ˆq 轴电压ˆ0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到ˆˆdq -估计同步旋转坐标系的ˆq轴电流ˆq i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的ˆq轴电流ˆq i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到ˆq轴电流ˆq i 的幅值信号()f θ∆;最后,对该幅值信号进行PI 调节,得到估计转速ˆω,对估计转速ˆω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计的转子位置ˆfirstθ; (4)在ˆˆdq -估计同步旋转坐标系的ˆd 轴上注入高频电压信号ˆcos()d mh h uU t ω=,在ˆq 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>;(5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收敛的磁极极性为N 极,转子初始位置ˆˆ=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置ˆˆ=initial firstθθπ+。
上述步骤(1)中,采用转子的估计位置ˆθ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值ˆuα和ˆu β。
采用上述方案后,本发明具有以下改进:(1)本发明在利用脉振高频电压注入法作初始位置初次估算的基础上,利用注入的转矩扰动分量,使电机产生一个机械的扰动,根据此时估算的电机转速来判断转子磁极的极性,实现永磁同步电机任意初始位置的位置估计;(2)本发明无需准确地电机参数和额外的硬件电路,系统简单稳定,相比较在直轴上注入正负脉冲电压判断磁极极性的方法,本发明对电机转子增磁去磁影响小;且仅就磁极极性判断而言,本发明不依赖于电机的凸极(包括饱和凸极)性,完全可以移植于其它的磁极极性判断方法上,具有良好的实用价值。
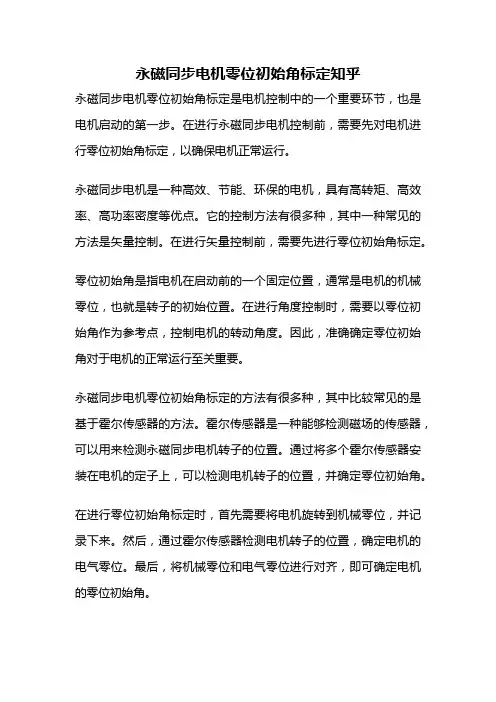
附图说明图1是本发明的原理框图;图2是两相静止坐标系、实际两相旋转坐标系与估算两相旋转坐标系的相对关系示意图;图3是本发明中位置速度估计调节系统的示意图。
具体实施方式以下将结合附图,对本发明的技术方案进行详细说明。
如图1所示,本发明提供一种永磁同步电机转子初始位置的判断方法,包括如下步骤:(1)建立坐标系关系图,如图2所示,d q -为实际同步旋转坐标系,ˆˆdq -为估计同步旋转坐标系,αβ-为实际两相静止坐标系,并且定义估计位置误差ˆθθθ∆=-,其中,θ为实际位置,ˆθ为估计位置,且ˆθ的初始值为0; (2)在ˆˆdq -估计同步旋转坐标系的ˆd 轴上注入高频电压信号ˆcos()d mh h u U t ω=,作为ˆd 轴电压给定,其中,mh U 表示注入信号的电压幅值,hω表示注入信号的角频率,ˆq轴电压ˆ0q u =,采用转子的估计位置ˆθ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值ˆuα和ˆu β;对实际两相静止坐标系下的电压给定值进行SVPWM 调制,得到六个驱动信号,控制三相全桥逆变器,向永磁同步电机定子绕组中注入电压信号;(3)通过检测电机的两相电流A i 和B i ,经过Clarke 得到实际两相静止坐标系下的电流i α和i β,再利用估计位置ˆθ进行Park 坐标系变换,得到估计同步旋转坐标系下的ˆd、ˆq 轴电流,其中ˆq 轴电流ˆq i 用于估计转子的位置与转速。
位置和转速估计系统如图3所示:首先,将检测得到的ˆq轴电流ˆq i 乘以调制信号cos()t h u t ω=,并经过低通滤波器(LPF ),得到ˆq 轴电流ˆq i 的幅值信号()f θ∆,即转子位置估计PI 调节器所需要的输入量,使输入量与估算转子误差有关;对该幅值信号进行比例-积分(PI )调节控制,使得()0f θ∆=,将此时PI 调节器的输出作为估计转速ˆω,估计转速ˆω积分得到估计的转子位置; (4)重复步骤(2)和步骤(3),直至电机估算的位置收敛为一恒定值保持不变,将此时的位置作为初次估计的转子位置ˆfirstθ; (5)在ˆˆdq -估计同步旋转坐标系的ˆd 轴上注入高频电压信号ˆcos()d mh h uU t ω=,作为ˆd 轴电压给定;ˆq 轴注入一个正方向扰动信号,作为ˆq 轴给定,采用估计的转子位置ˆfirstθ,进行Park 逆变换,获得实际两相静止坐标系下电压的给定值ˆuα和ˆu β;对实际两相静止坐标系下电压的给定值进行SVPWM 调制,得到六个驱动信号,控制三相全桥逆变器,向永磁同步电机定子绕组中注入电压信号;(6)通过检测电机的两相电流A i 和B i ,经过Clarke 得到实际两相静止坐标系下的电流i α和i β,再利用估计位置ˆθ进行Park 坐标系变换,得到估计同步旋转坐标系下的ˆd、ˆq 轴电流,其中ˆq 轴电流ˆq i 用于估计转子的位置与转速; (7)重复执行步骤(5)和步骤(6),直至电机转过微小的角度γ,0γ>;此处并不刻意限定电机转过角度的数值范围,只要能判断出电机转动即可;(8)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收敛的磁极极性为N 极,转子初始位置ˆˆ=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置ˆˆ=initial firstθθπ+。
以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
1 说 明 书 附 图Park 逆变换SPMSM ˆd u C B ˆθA i B i SPWM 调制三相逆变器Clarke 变换Park 变换A i αi β磁极判断dc U ref u βref u α初次位置估算++ˆωˆq u ˆfirst θˆq i ˆd i 电流传感器 图1 θβd q θ∆o ˆq d ˆθ 图2 LPF PI ˆfirst θ()f θ∆ˆωcos h t ωˆq i 1S 0 图3。