模糊控制系统的应用
- 格式:docx
- 大小:40.43 KB
- 文档页数:12
瞄囡囡图口囫园囝揣诫‰咖蛐a州。
协模糊控制在水处理系统中的应用主晋卿陈翼李森(莱芜钢铁集团公司自动化部,山东莱芜271104)高新技术摘要:将模糊控制技术引入水处理生产线水量平衡控制中,在基本的模糊控制规则表基础上,得到模糊控制规则的解析式描述,对输入量和输出量的模糊量化和反模糊化方法加以改进,收到了良好的效果。
因此,本文针对漩流井的4台提升泵,正常情况下是两用两备。
能够根据水池水位的高低,依据模糊控制原理,自动起停水泵,并用实际数据完成了仿真研究,最后的仿真结果表明了该方法是有效可行的。
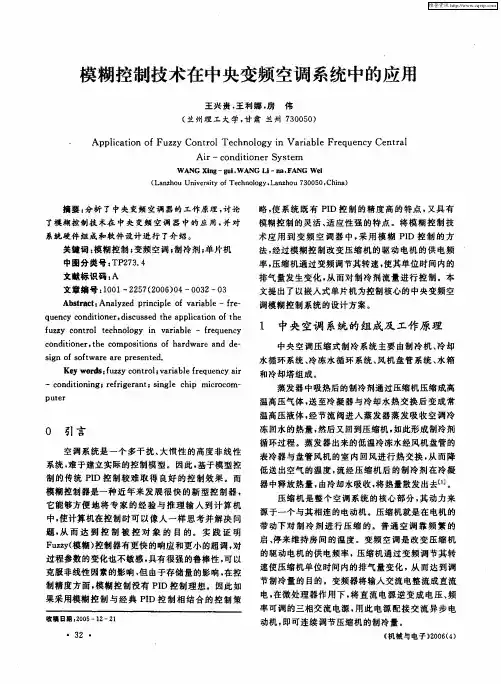
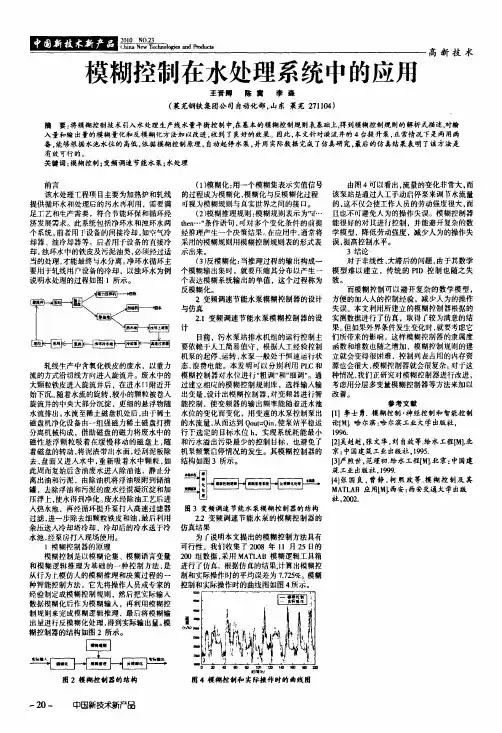
关键词:模糊控制;变额调速节能水泵;水处理前言该水处理1二程项目主要为加热炉和轧线提供循环水和处理后的污水再利用,需要满足工艺和生产需要,符合节能环保和循环经济发展需求。
此系统包括净环水和浊环水两个系统。
前者用丁设备的间接冷却.如夺气冷却器、油冷却器等。
后者用于设备的直接冷却。
浊环水中的铁皮及污泥油类,必须经过适当的处理,才能最终与水分离。
净环水循环主要用于轧线用户设备的冷却,以浊环水为例说明水处理的过程如图l所示。
轧线生产中含氧化铁皮的废水,以重力流的方式沿切线方向进入旋流井。
废水中的大颗粒铁皮进入旋流井后。
在进水f1附近开始下沉。
随着水流的旋转,较小的颗粒被卷入旋流井的中央大部分沉淀.更细的悬浮物随水流排出。
水流至稀土磁盘机处后,由二r稀土磁盘机净化设备由一组强磁力稀土磁盘打捞分离机械构成,借助磁盘的磁力将废水中的磁性悬浮颗粒吸着在缓慢移动的磁盘上,随着磁盘的转动,将泥渣带f l{水面,经刮泥板除去,盘面又进入水中,重新吸着水中颗粒,如此周而复始后含油废水进入除油池.静止分离出油和污泥,由除油机将浮油吸附到储油罐,去除浮油和污泥的废水经混凝沉淀和加压浮上,使水得到净化。
废水经除油工艺后进入热水池,再经循环提升泵打入高速过滤器过滤.进一步除去细颗粒铁皮和油,最后利用余压送入冷却塔冷却,冷却后的冷水送于冷水池,经泵房打人现场使用。
模糊控制考核论文姓名:郑鑫学号:1409814011 班级:149641 题目:模糊控制的理论与发展概述摘要模糊控制理论是以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
本文简单介绍了模糊控制的概念及应用,详细介绍了模糊控制器的设计,其中包含模糊控制系统的原理、模糊控制器的分类及其设计元素。
关键词:模糊控制;模糊控制器;现状及展望Abstract Fuzzy control theory is based on fuzzy mathematics, using language rule representation and advanced computer technology, it is a high-level control strategy which can make decision by the fuzzy reasoning. Fuzzy control is a computer numerical contro which based fuzzy set theory, fuzzy linguistic variables and fuzzy logic, it has become the effective form of intelligent control especially in the form of fuzzy control and neural networks, genetic algorithms and chaos theory and other new integration of disciplines, which is showing its great potential. Fuzzy control is essentially a nonlinear control, and subordinates intelligent control areas. A major feature of fuzzy control is both a systematic theory and a large number of the application background.This article introduces simply the concept and application of fuzzy control and introduces detailly the design of the fuzzy controller. It contains the principles of fuzzy control system, the classification of fuzzy controller and its design elements.Key words: Fuzzy Control; Fuzzy Controller; Status and Prospects.引言传统的常规PID控制方式是根据被控制对象的数学模型建立,虽然它的控制精度可以很高,但对于多变量且具有强耦合性的时变系统表现出很大的误差。
模糊控制用偏差和偏差变化率
模糊控制是一种控制系统,它利用模糊逻辑来处理模糊和不确
定的输入,以产生相应的控制输出。
在模糊控制中,常常会用到偏
差(error)和偏差变化率(rate of change of error)这两个参
数来进行控制。
偏差指的是实际值与期望值之间的差异,它是模糊控制中常用
的输入变量之一。
在控制系统中,偏差可以用来衡量当前状态与期
望状态之间的偏离程度,进而用来调节控制器的输出,使系统能够
更快地趋向期望状态。
偏差变化率则是偏差随时间变化的速率。
它可以用来判断系统
的动态特性以及系统是否趋向稳定。
在模糊控制中,偏差变化率常
常被用来调节控制器的响应速度,以确保系统能够快速而稳定地响
应外部变化。
综合来看,模糊控制利用偏差和偏差变化率作为输入变量,通
过模糊化处理和模糊推理得到控制输出,从而实现对系统的控制。
通过合理地设计模糊控制器的输入变量和模糊规则,可以使系统具
有较强的鲁棒性和适应性,能够应对复杂的控制环境和非线性系统。
同时,模糊控制也可以在一定程度上克服传统控制方法中对系统动
态特性和参数变化的敏感性,因此在实际工程中具有一定的应用前景。
总的来说,偏差和偏差变化率在模糊控制中扮演着重要的角色,它们作为控制器的输入变量,能够帮助系统更好地实现对复杂系统
的控制和调节。
模糊算法的基本原理与应用模糊算法是20世纪60年代提出的一种新的数学分析方法,具有广泛的应用领域,如控制理论、人工智能、模式识别、决策分析等。
本文将介绍模糊算法的基本原理以及在实际应用中的一些案例。
一、模糊算法的基本原理模糊算法的核心思想是将不确定性和模糊性考虑进来,将数据分为模糊集合,不再是传统意义上的精确集合。
模糊集合是指一个元素可能属于这个集合的程度,它用隶属度函数来表示。
举个例子,一个人的身高不可能绝对的是1米80,可能是1米78或者1米82,那么身高就可以看成一个模糊集合,每个身高值对应一个隶属度。
隶属度函数一般用μ(x)表示,μ(x)的取值范围是[0,1],它表示元素x属于该模糊集合的程度。
为了使模糊算法具有可操作性,需要建立一套模糊集合运算规则。
常用的包括交运算和并运算。
1. 交运算:模糊集合A和B的交集,定义为:A ∩B = { (x, min(μA(x), μB(x))) | x∈X }其中X是数据集合。
这个公式的意思是,对于集合A和B中都出现的元素x,它们的隶属度的最小值就是A∩B中x的隶属度。
2. 并运算:模糊集合A和B的并集,定义为:A ∪B = { (x, max(μA(x), μB(x))) | x∈X }其中X是数据集合。
这个公式的意思是,对于集合A和B中出现的元素x,它们的隶属度的最大值就是A∪B中x的隶属度。
二、模糊算法在实际应用中的案例1. 模糊控制系统模糊控制系统是模糊算法应用最广泛的领域之一。
传统的控制系统需要建立数学模型,对系统进行分析和设计。
而模糊控制系统则是基于经验的,采用模糊集合来描述系统状态,从而规划控制策略。
比如在家电产品中,智能洗衣机的控制系统就采用了模糊控制算法,根据衣物的不同湿度、污渍程度、质地等因素,自动调整洗涤方案,达到最佳的洗涤效果。
2. 模糊识别系统模糊识别系统是指通过对事物进行模糊描述和抽象,进行模式匹配和分类的一类智能系统。
它可以处理各种类型的信息,比如图像、声音、文本等等。
控制系统中的滑模控制与模糊控制比较控制系统是现代工程中的重要组成部分,用于实现对系统的稳定性、性能和鲁棒性的调节和控制。
在控制系统中,滑模控制和模糊控制是两种常用的控制方法。
本文将比较滑模控制和模糊控制的优缺点、适用范围以及在不同场景下的应用。
一、滑模控制滑模控制是一种以滑动面为基础的控制方法,通过引入滑动变量来实现对系统状态的控制。
滑模控制具有以下特点:1. 系统鲁棒性强:滑模控制通过引入滑动面,能够有效抵抗外部扰动和不确定性对系统的影响,使系统具有较强的鲁棒性。
2. 控制精度高:滑模控制可以实时调节控制量,使系统状态能够快速地跟踪期望值,从而提高系统的控制精度。
3. 设计和调试难度大:滑模控制需要设计滑模面和滑动变量的参考值,这些参数往往需要经验和专业知识的支持。
同时,滑模控制存在滑模面的快速切换问题,这对控制器的设计和调试带来了一定的困难。
二、模糊控制模糊控制是一种基于模糊逻辑的控制方法,通过定义模糊规则和使用模糊推理来实现对系统的控制。
模糊控制具有以下特点:1. 控制规则灵活:模糊控制使用模糊规则来描述系统的行为,可以根据具体的情况灵活调整规则,适应不同的工程需求。
2. 控制器设计简单:模糊控制不需要精确的系统模型,只需要通过专家经验和模糊规则来设计控制器,大大简化了控制器的设计过程。
3. 控制鲁棒性一般:由于模糊控制是基于模糊规则的,对于一些复杂的系统和精度要求高的控制任务,模糊控制的鲁棒性可能不够。
三、滑模控制与模糊控制的比较滑模控制和模糊控制作为两种不同的控制方法,在不同场景下有各自的优势和适用范围。
1. 鲁棒性比较:滑模控制通过引入滑动面来增强系统的鲁棒性,能够有效应对外部扰动和不确定性。
而模糊控制的鲁棒性相对较差,在面对复杂系统和精度要求较高的场景下可能无法满足要求。
2. 控制精度比较:滑模控制通过实时调节控制量,能够实现较高的控制精度,适用于对系统要求较高的场景。
而模糊控制的控制精度相对较低,适用于对系统要求不那么苛刻的场景。
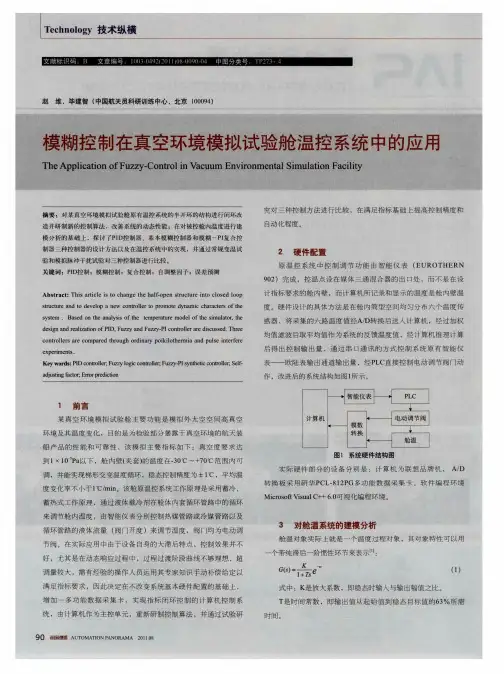
模糊控制器在中央空调系统温度控制中的应用
于实际经验的总结。
从经验出发,用语言形式表达表达推理控制决策过程如下:
IF{温度设定值和回风温度偏差过大AND 偏差有变大的趋势}
THEN{电动水阀全开};IF{温度设定值和回风温度偏差过小AND 偏差有变小的趋势}THEN{电动水阀全闭};
类似于上述的一系列控制规则集中在控制规则表中。
在应用模糊控制器实际进行实时控制时,一定的偏差e 和偏差变化率de/dt,对应的就有某一些IF-THEN 控制规则生效,而这些生效的控制规则产生一个综合推断结论,并通过解模糊过程转换为一个确定的输出值,从而给定电动水阀的控制电压,对应于电动水阀的开度。
我们应用了模糊逻辑的min-max 合成运算获得综合推断控制决策,并通过mom 法,进行解模糊,产生确定的控制调节作用。
3 系统仿真
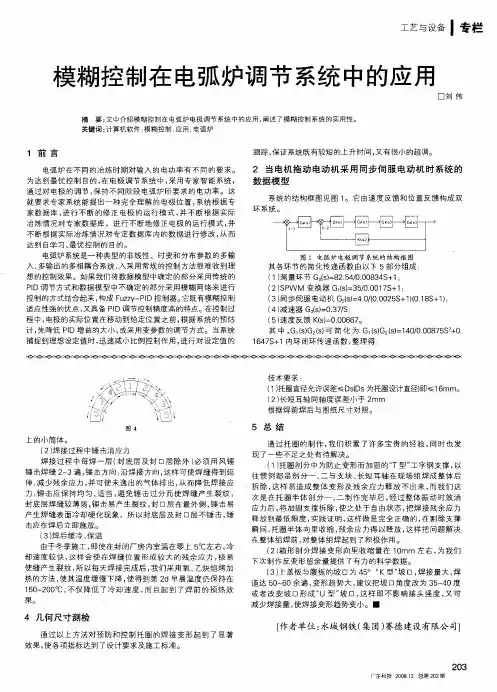
MATLAB 中的模糊逻辑工具箱提供了大量的对输入、输出变量进行模糊化(隶属度函数)的函数(总共提供了11 种隶属度函数),可以很方便的完成对变量的模糊化。
在模糊控制箱中只需给定输入、输出变量的隶属度函数即可完成对变量的模糊化。
3.1 输入、输出变量的模糊化
图3 所示的模糊控制系统为双输入单输出系统,输入为偏差e 和偏差的变化率,输出为u,我们可根据前边给定的输入、输出变量的隶属度函数,在模糊逻辑控制箱添加隶属度函数就可以完成模糊变量的模糊化过程。
3.2 模糊控制规则。
模糊控制的名词解释模糊控制是一种基于模糊逻辑的控制方法,它利用一系列模糊规则来处理模糊的输入和输出。
相比传统的精确数学模型,模糊控制具有更强的适应性和鲁棒性,在处理复杂、非线性、模糊的系统时表现良好。
本文将从模糊控制的基本原理、应用案例以及发展前景等方面进行阐述。
首先,我们来解释一下模糊控制的基本原理。
模糊控制的核心思想是将模糊的输入转化为模糊的输出,通过一系列模糊规则来实现系统的控制。
在传统的控制方法中,系统的输入和输出往往是精确的数学值,例如温度、压力等。
而在模糊控制中,我们使用模糊集合来描述输入和输出的模糊程度。
模糊集合是一种介于0和1之间的隶属度函数,表示事物在某种属性上的相似性。
通过建立模糊规则,将输入的模糊集合映射到输出的模糊集合,从而实现对系统的控制。
模糊控制的应用十分广泛,下面我们将介绍几个典型的案例。
首先是自动驾驶系统。
在自动驾驶中,模糊控制被用于处理复杂的交通环境和模糊的车辆行为。
通过对输入数据进行模糊化处理,例如车辆间的距离、速度等,可以更好地适应多变的交通状况,从而提高驾驶的安全性和舒适性。
其次是机器人控制。
在机器人控制中,模糊控制被应用于路径规划、障碍物避免等方面。
通过对环境的感知和模糊规则的设计,机器人可以更灵活地应对复杂的工作场景。
此外,模糊控制还被广泛应用于工业过程控制、电力系统、航空航天等领域。
在工业过程控制中,模糊控制可以应对非线性和时变的过程,实现更精确和稳定的控制效果。
在电力系统中,模糊控制可以应对电网的复杂性和不确定性,实现电力的高效供应和调度。
在航空航天领域,模糊控制可以应对飞行器的姿态控制、导航以及自主决策等方面的问题。
随着科技的发展和应用的不断深化,模糊控制领域也在不断壮大。
未来,模糊控制可以与其他智能技术结合,例如人工神经网络、遗传算法等,实现更高级的智能控制。
同时,模糊控制也在不断发展新的算法和方法,以应对更复杂、更大规模的系统。
例如,基于模糊集合和模糊规则的大规模控制系统优化算法,可以使系统在多个不同的目标之间进行权衡和优化。
模糊控制系统的应用 模糊控制系统的应用
一、模糊控制系统的应用背景 模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一 种计算机数字控制技术。佃65年美国的扎德创立了模糊集合论,佃73年,他给出 了模糊逻辑控制的定义和相关的定理。 1974年英国的Mamdani首先用模糊控 制语句组成模糊控制器,并把它用于锅炉和蒸汽机的控制,在实验室获得成功, 这一开拓性的工作标志着模糊控制论的诞生。 模糊控制系统主要是模拟人的思维、推理和判断的一种控制方法 ,它将人 的经验、常识等用自然语言的形式表达出来,建立一种适用于计算机处理的输 入输出过程模型,是智能控制的一个重要研究领域。从信息技术的观点来看 , 模糊控制是一种基于规则的专家系统。从控制系统技术的观点来看 ,模糊控制 是一种普遍的非线性特征域控制器。 相对传统控制,包括经典控制理论与现代控制理论。模糊控制能避开对象 的数学模型(如状态方程或传递函数等),它力图对人们关于某个控制问题的成 功与失败和经验进行加工,总结出知识,从中提炼出控制规则,用一系列多维 模糊条件语句构造系统的模糊语言变量模型,应用CRI等各类模糊推理方法, 可以得到适合控制要求的控制量,可以说模糊控制是一种语言变量的控制。 模糊控制具有以下特点: (1) 模糊控制是一种基于规则的控制。它直接采用语言型控制规则 ,出发 点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对 象的精确数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便 于应用; (2) 由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊 控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常 适用; (3) 基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同 容易导致较大差异;但一个系统的语言控制规则却具有相对的独立性,利用这 些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制 器; (4) 模糊控制算法是基于启发性的知识及语言决策规则设计的 ,这有利于 模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能 水平; (5)模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大 减弱,尤其适合于非线性、时变及纯滞后系统的控制。 除此,模糊控制还有比较突出的两个优点: 第一,模糊控制在许多应用中可以有效且便捷地实现人的控制策略和经 验; 第二,模糊控制可以不需被控对象的数学模型即可实现较好的控制 ,这是 因为被控对象的动态特性已隐含在模糊控制器输入、输出模糊集及模糊规则中。 模糊控制也有缺陷,主要表现在:1)精度不太高;2)自适应能力有限;3)易 产生振荡现象。
二、模糊控制系统的现状 模糊控制的研究主要体现在控制器的研究和开发以及各类实际应用中 ,目 前模糊控制已经应用在各个行业。各类模糊控制器也非常多,模糊控制器的研究 一直是控制界研究的热点问题,而关于模糊控制系统的稳定性分析则是模糊控 制需要研究和解决的基本问题。目前已经出现了为实现模糊控制功能的各种集 成电路芯片。开发模糊控制系统的软件工具也出现了不少。下面作一简单介绍。 1 •与其它智能控制的结合或融合 模糊控制与其它智能控制的复合产生了多种控制方式方法。主要表现在 : 1) 模糊PID控制器 模糊PID控制器的研究是将模糊技术与常规的 PID控制算法相结合的一种 控制方法,得到了许多学者的关注。模糊PID控制器是一种双模控制形式。这种 改进的控制方法的出发点主要是消除模糊控制的系统稳态误差 ,利用PID控制 器提高控制精度,消除误差,增加稳态控制性能。从PID控制角度出发,提出FI —PI、FI — PD、FI — PID三种形式的模糊控制器,并能运用各种方式得出模 糊控制器中量化因子、比例因子同 PID控制器的因子KP、KI、KD之间的关 系式。对基于简单线性规则TS模型的模糊控制器进行了分析,指出这类模糊控 制器是一种非线性增益PID控制器。有人试图利用GA算法,通过性能指标评价 函数,决定模糊控制器的Ke、Kec、Ku等参数。 2) 自适应模糊控制器 自适应模糊控制器就是借鉴自适应控制理论的一些理念来设计模糊控制器 , 也称作语言自组织模糊控制器(SOC),它的思想就在于在线或离线调节模糊控 制规则的结构或参数,使之趋于最优状态。目前主要有通过采用一种带有修正因 子的控制算法,改变控制规则的特性;或直接对模糊控制规则进行修正;还有一 种是对控制规则进行分级管理,提出自适应分层模糊控制器;又有人提出规则 自组织自学习算法,对规则的参数以及数目进行自动修正 ;更进一步的是采用 神经网络对模糊控制规则及参数进行调整 ,也是一种实现模糊自适应控制的好 方法。 3) 模糊控制与神经控制的融合 神经模糊控制是神经网络技术与模糊逻辑控制技术相结合的产物 ,是指基 于神经网络的模糊控制方法。模糊系统是建立在 IF2THEN表达式之上,这种方 式容易让人理解,但是在自动生成和调整隶属函数和模糊规则上却很困难。 而人 工神经网络是模拟人直观性思维的一种方式,它是将分布式存储的信息并行协 同处理,是一个非线性动力学系统,每个神经元结构简单,但大量神经元构成网 络系统能实现很强的功能,因此人工神经网络具有自适应的学习能力、 容错性和 鲁棒性,并且神经网络对环境的变化具有较强的自适应能力 ,所以可结合神经 网络的学习能力来训练_模糊规则,提高整个系统的学习能力和表达能力。现有 人工神经网络代表性的模型有感知器、多层映射、 BP网络、RBF神经网络实 现局部或全部的模糊逻辑控制功能,前者如利用神经网络实现模糊控制规则或 模糊推理,后者通常要求网络层数多于3层;自适应神经网络模糊控制,利用神 经网络的学习功能作为模型辨识或直接用作控制器 ;基于模糊神经网络的隶属 函数及推理规则的获取方法,具有模糊连接强度的模糊神经网等 ,均在控制中 有所应用。而且,还有神经网络与遗传算法同模糊控制相结合的自调整应用。 4) 遗传算法优化的模糊控制 考虑到模糊控制器的优化涉及到大范围、多参数、复杂和不连续的搜索表 面,而专家的经验只能起一个指导作用,很难根据它准确地定出各项参数,因而 实际上还要反复试凑,寻找一个最优过程。因此,人们自然想到用遗传算法来进 行优化。遗传算法应用于模糊控制器的优化设计是非常适合的,遗传算法的运行 仅由适应度数值驱动而不需要被优化对象的局部信息。 此外,优化模糊控制器正 好符合遗传算法的所谓“积木块”假设,积木块指长度较短的、性能较好的基因 片段。用遗传算法优化模糊控制器时,优化的主要对象是模糊控制器的隶属函数 和规则集。已经有人运用这个方法对倒立摆控制器隶属函数的位置、形状等参 数,结果表明遗传算法优化后的隶属函数远远优于手工设计的。 显然通过改进遗 传算法,按所给优化性能指标,对被控对象进行寻优学习,可以有效地确定模糊 逻辑控制器的结构和参数。 5) 模糊控制与专家控制相结合 专家模糊控制系统是由专家系统技术和模糊控制技术相结合的产物。把专 家系统技术引入模糊控制之中,目的是进一步提高模糊控制器的智能水平。专家 模糊控制保持了基于规则的方法的价值和用模糊集处理带来的灵活性 ,同时把 专家系统技术的表达,利用知识的长处结合进来。专家系统技术考虑了更多方面 的问题,如是什么组成知识,如何组织、如何表达、如何应用知识。专家系统方 法重视知识的多层次及分类的需要,以及利用这些知识进行推理的计算机组织。 将模糊控制与专家控制相结合能够表达和利用控制复杂过程和对象所需的启发 式知识,重视知识的多层次和分类的需要,弥补了模糊控制器结构过于简单、规 则比较单一的缺陷,赋予了模糊控制更高的智能;二者的结合还能够拥有过程 控制复杂的知识,并能够在更为复杂的情况下对这些知识加以有效利用。 除以上 介绍的几种主要方式外,还有多变量模糊控制,模糊系统建模及参数辨识、模糊 滑模控制器、模糊解耦控制器、模糊变结构控制、模型参考自适应控制、最优 模糊控制器、模糊预测控制等。 2 •模糊控制的软硬件产品 为了更好的利用模糊控制,相继有不少公司开发了模糊控制的软件工具和 硬件集成电路。 这里介绍了两类开发工具,一类是开发模糊系统的软件工具,如 FREEWARE、FIDE、东芝 IFCS、NEC FL SDE、FC - TOOL V110 。另一类 是通用模糊逻辑开发工具,女口CUBICALC、FUZZY -C、FUZZL E 118 、METUS FUZZY L IBRARY、FUZZY LOGIC DESIGNER 等。并介绍了一些其它的开 发工具。 3 .模糊控制的一些应用 模糊控制的应用非常广泛。除广泛应用于工业控制、家电控制、水电控制、 航天等外。我们还可以用在统计上、决策系统上、制造活性炭过程中等。
三、模糊控制系统的最新应用
(一)富士通MWC智能手套可识别模糊动作 日本富士通发布一款新的手势控制设备原型产品,它是手指手套的样子, 可以戴在操作者的手上。据悉,此前富士通研究所一直在开发新的手势控制手 套,并嵌入了 NFC技术和基于手势的输入控制接口。在触屏或者其他控制接口 不可用的情况下,富士通提供了一种新的操作方式。研究所已经研发出手势识 别技术,能完美识别各种模糊动作,实现多任务运行。手势识别精确度大部分 由设备在运行过程中分辨操作手势和普通手臂运动的能力所决定,还有不同个 体做相同手势的微小变化。这种识别技术主要是利用腕部的背屈位置,这时手 掌完全反转,这是大家在日常活动中不常用的姿势,所以它就能够很好的识别 操作手势和普通手臂运动。此外,它还定义了很多基于肩部的手势,以此作为