单片机实例之跑马灯
- 格式:ppt
- 大小:1.06 MB
- 文档页数:59
电子系统综合设计报告学号 201009120229 姓名李文海年级专业 2010级电子信息工程(二) 指导教师刘怀强学院理学院走马灯实验论文--《嵌入式系统技术》1、实验目的1、学会dp-51pro实验仪监控程序下载、动态调试等联机调试功能的使用;2、理解和学会单片机并口的作为通用i/o的使用;3、理解和学会单片机外部中断的使用;4、了解单片机定时器/计数器的应用。
2、实验设备z pc 机、arm 仿真器、2440 实验箱、串口线。
3、实验内容z 熟悉 arm 开发环境的建立。
z 使用 arm 汇编和 c 语言设置 gpio 口的相应寄存器。
z 编写跑马灯程序。
5、实验原理走马灯实验是一个硬件实验,因此要求使用dp-51pro 单片机综合仿真实验仪进行硬件仿真,首先要求先进行软件仿真,排除软件语法错误,保证关键程序段的正确。
然后连接仿真仪,下载监控程序,进行主机与实验箱联机仿真。
为了使单独编译的 c 语言程序和汇编程序之间能够相互调用,必须为子程序间的调用规定一定的规则。
atpcs ,即 arm , thumb 过程调用标准(arm/thumb procedure callstandard),是 arm 程序和 thumb 程序中子程序调用的基本规则,它规定了一些子程序间调用的基本规则,如子程序调用过程中的寄存器的使用规则,堆栈的使用规则,参数的传递规则等。
下面结合实际介绍几种 atpcs 规则,如果读者想了解更多的规则,可以查看相关的书籍。
1.基本 atpcs 基本 atpcs 规定了在子程序调用时的一些基本规则,包括下面 3 方面的内容:(1)各寄存器的使用规则及其相应的名称。
(2)数据栈的使用规则。
(3)参数传递的规则。
相对于其它类型的 atpcs,满足基本 atpcs 的程序的执行速度更快,所占用的内存更少。
但是它不能提供以下的支持: arm 程序和 thumb 程序相互调用,数据以及代码的位置无关的支持,子程序的可重入性,数据栈检查的支持。
微控制器综合设计与实训实验名称:实验三跑马灯实验实验三:跑马灯实验1 实训任务(1) 编写程序,实现对LED1~LED8的轮流点亮;(2) 仿真调试,调整延时时间,利用仿真示波器观察延时时间长短;(3) 下载程序,观察跑马灯运行状况。
1.1 实验说明本实验将要实现的是控制实训平台上的8个LED灯实现一个类似跑马灯的效果,LED通过控制IO口的高低电平工作,因此实验的关键在于如何控制STM32的IO口输出。
1.2 实验步骤(1) 在实训平台上将IO口与LED(LED1~LED8)连接;(2) 复制工程模板文件夹,新建led.c和led.h文件,并将新建文件加入工程中;(3) 编写led.h文件,声明void LED_Init(void)初始化函数,宏定义LED1~LED8;(4) 编写led.c文件,建立void LED_Init(void)初始化函数,实现对LED灯用到的IO端口的配置,配置为推挽输出,速度为50MHZ;(5) 编写main()函数,实现对LED1~LED8的轮流点亮;(6) 软件仿真,调整延时时间,利用仿真示波器观察延时时间长短;(7) 下载程序,观察跑马灯的运行状况。
2 程序设计2.1 通过数组实现流水灯:2.2 通过宏定义实现流水灯:2.3 通过函数实现流水灯:2.4 通过SYSTICK中断实现流水灯:3硬件原理图设计4 总结通过数组实现流水灯:通过宏定义实现流水灯:通过函数实现流水灯:通过SYSTICK中断实现流水灯:实验心得:本次实验通过四种方法来实现流水灯,分别是通过数组实现流水灯,通过宏定义实现流水灯,通过函数实现流水灯,通过SYSTICK中断实现流水灯。
让我体会到单片机代码的多样性及强大的拓展功能。
MCU通过控制IO口的高低电平来直接控制LED的亮灭,所以本实验的关键是如何控制STM32的IO口输出,来达到我们想要的效果。
就比如灯光秀。
摘要本设计使用AT89C51单片机作为微控制器,利用P0口连接8个发光二极管,通过两个按键KEY1和KEY2输入外部中断INT0和INT1来控制“跑马灯”的运停和选项,从而实现多种跑马的形式,以达到停止、继续,并要求有多种亮暗组合的实现。
关键词:MCS51 跑马灯独立按键目录摘要 (I)1设计概述 (1)2 AT89C51概述 (2)2.1 AT89C51的硬件结构 (2)2.2 AT89C51的工作模式 (6)2.3 AT89C51程序存储器的加密 (8)3硬件电路设计 (9)4 可控跑马灯的软件设计 (11)4.1程序流程图 (11)4.2 程序代码 (12)5 心得体会 (17)参考文献 (18)1设计概述整个设计过程是先通过了解任务要求和功能指标,查阅书籍、资料,确定硬件和软件方案,到实现硬件电路和软件程序,最后到系统板的运行实验以及修改调试,最终成功完成。
在众多的微控制器中,我选择了较为熟悉的AT89C51单片机,由于按键软件去抖效果逊色于硬件去抖,所以我选用硬件去抖。
根据任务书中描述的功能,设计的外围资源较少,所以采用了两个外部中断来作为按键的输入,这样可以减少软件设计的负担。
而LED电路采用常用的上拉电阻,接到IO口的方法。
总体下来软、硬件都较为简易,这样设计时,成功率可大大提高。
2 AT89C51概述AT89C51是一个低电压,高性能CMOS 8位单片机带有4K字节的可反复擦写的程序存储器(PENROM)。
和128字节的存取数据存储器(RAM),这种器件采用ATMEL公司的高密度、不容易丢失存储技术生产,并且能够与MCS-51系列的单片机兼容。
片内含有8位中央处理器和闪烁存储单元,有较强的功能的AT89C51单片机能够被应用到控制领域中。
AT89C51提供以下的功能标准:4K字节闪烁存储器,128字节随机存取数据存储器,32个I/O口,2个16位定时/计数器,1个5向量两级中断结构,1个串行通信口,片内震荡器和时钟电路。
实验1 跑马灯实验一、实验目的●初步学会Proteus ISIS和uVision2单片机集成开发环境的使用;●初步掌握采用汇编语言与C语言开发单片机系统的程序结构;●掌握80C51单片机通用I/O口的使用;●掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法。
二、实验设备及器件●硬件:PC机,HNIST-1型单片机实验系统●软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境三、实验内容●编写一段程序,采用P1口作为控制端口,使与P1口相接的四个发光二极管(D1、D2、D3、D4)按照一定的方式点亮。
如点亮方式为:先点亮D1,延时一段时间,再顺序点亮D2……D4,然后又是D4……D1,同时只能有一个灯亮;然后每隔一段时间一次使相邻两个灯亮,三个灯亮,四个灯亮,最后闪烁三次,接着循环变化。
●基于Proteus ISIS仿真环境完成上述功能的仿真。
●基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
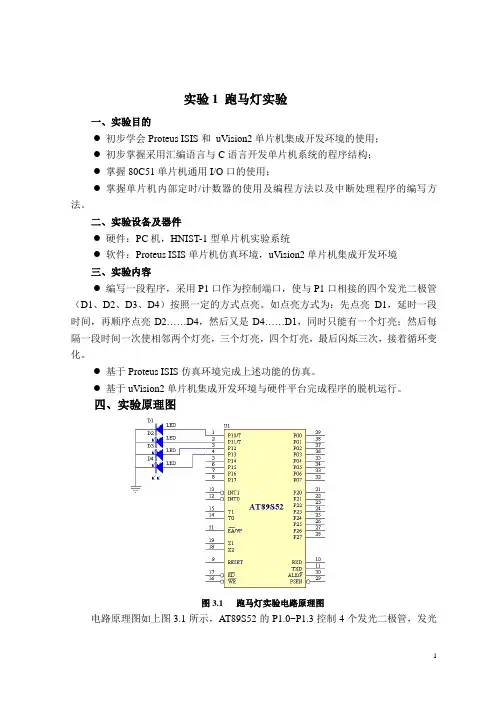
四、实验原理图图3.1 跑马灯实验电路原理图电路原理图如上图3.1所示,AT89S52的P1.0~P1.3控制4个发光二极管,发光二极管按照一定次序发光,相邻发光二极管的发光时间间隔可以通过定时器控制,还可以通过软件延时实现。
五、软件流程图与参考程序●主程序流程图如下:●参考程序#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intuchar aa,num,speed,flag;uchar code table[]={0x0e,0x0d,0x0b,0x07};uchar code table1[]={0x0a,0x05,0x09,0x06};uchar codetable2[]={0x0c,0x09,0x03,0x08,0x01,0x0e,0x0c,0x08,0x00};void delay(uint z)//延时函数{uint x;uchar y;for(x=z;x>0;x--)for(y=200;y>0;y--);}void init()//条件初始化函数{ flag=0;speed=10;//控制跑马灯流水速度TMOD=0x01;//中断方式TH0=(65535-50000)/256;TL0=(65536-50000)%256;//初值EA=1;//打开总中断ET0=1;//打开外中断0TR0=1;}void main(){init();//调用初始化函数while(1){if(flag){delay(2000);//调用延时函数for(num=0;num<4;num++)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=0;num<4;num++)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=0;num<6;num++)//两个,三个,四个跑马灯依次闪烁{P1=table2[num];delay(2000);}for(num=0;num<5;num++)//闪烁5次{P1=0xff;//全暗delay(2000);P1=0X00;//全亮delay(2000);}speed=speed-3;//变速if(speed==4){speed=10;}}}}void timer0() interrupt 1//中断函数{TH0=(65535-50000)/256;TL0=(65536-50000)%256;aa++;if(aa==speed){aa=0;flag=1;}}六、实验思考题●请用汇编指令完成本实验内容,深刻理解汇编语言程序设计结构。
一、实训背景随着科技的发展,单片机作为一种重要的嵌入式系统控制单元,在工业控制、智能家居、物联网等领域得到了广泛的应用。
为了提高学生对单片机程序设计的理解和实践能力,本次实训选择了跑马灯程序设计作为实训项目。
二、实训目的1. 熟悉单片机的基本结构和编程方法。
2. 掌握Keil C51集成开发环境的使用。
3. 学习跑马灯程序的设计与实现。
4. 培养动手实践能力和团队协作精神。
三、实训内容本次实训主要分为以下几个部分:1. 电路设计:设计跑马灯的电路,包括单片机、LED灯、电阻、按键等元件。
2. 程序设计:编写跑马灯的程序,实现LED灯的正序、倒序、闪烁等功能。
3. 程序调试:在Keil C51集成开发环境中进行程序调试,确保程序正常运行。
4. 实验报告撰写:总结实训过程中的经验和收获,撰写实验报告。
四、电路设计跑马灯电路主要包括以下元件:1. 单片机:选用AT89C51单片机作为控制核心。
2. LED灯:使用8个LED灯作为显示元件。
3. 电阻:用于限流,防止LED灯烧毁。
4. 按键:用于控制跑马灯的运行模式。
电路连接方式如下:1. 将8个LED灯的正极依次连接到单片机的P1口。
2. 将8个LED灯的负极依次连接到地线。
3. 将按键的一端连接到单片机的P3.0口,另一端连接到地线。
五、程序设计跑马灯的程序采用C语言编写,主要功能包括:1. 正序跑马灯:LED灯依次点亮,从D1到D8。
2. 倒序跑马灯:LED灯依次点亮,从D8到D1。
3. 闪烁跑马灯:LED灯快速闪烁。
程序流程如下:1. 初始化单片机P1口为输出模式。
2. 根据按键输入选择跑马灯的运行模式。
3. 根据选择的模式,依次点亮LED灯。
4. 延时一段时间,然后继续点亮下一个LED灯。
5. 重复步骤3和4,直到所有LED灯点亮完毕。
程序代码如下:```c#include <reg51.h>#define LED P1void delay(unsigned int t) {unsigned int i, j;for (i = 0; i < t; i++)for (j = 0; j < 120; j++);}void main() {unsigned char i;LED = 0x01; // 正序跑马灯while (1) {for (i = 0; i < 8; i++) {delay(500); // 延时LED = (0x01 << i); // 点亮下一个LED灯}}}```六、程序调试在Keil C51集成开发环境中,将程序代码编译生成HEX文件,然后将HEX文件烧录到单片机中。
专业:电子信息工程学号: 0414110102 Hebei Normal University of Science & Technology单片机原理及应用课程设计(2013 年至2014学年度第 2 学期)题目:可以调控的走马灯学生姓名:院(系、部):机电工程学院指导教师:设计时间: 2014.6.9—2014.6.13可以调控的走马灯摘要:单片机自20世纪70年代问世以来,以其极高的性能价格比,受到人们的重视和关注,应用很广、发展很快,而51单片机是各单片机中最为典型和最有代表性的一种。
本课程设计是基于MCS51系列单片机所设计的,用AT89S52芯片控制跑马灯(流水灯),整个系统有8种跑马灯模式可以选择,K1是选择模式键,并将相应的模式在LED七段数码管中显示出来,K2可以对跑马灯的速度进行加速,K3可以对跑马灯的速度进行减速。
整个系统可以实现对跑马灯模式的多层控制,还可以进行加减速。
关键词:MCS51、跑马灯、加减速、七段数码管一、概论1.1 单片机基础知识单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。
概括的讲,一块芯片就成了一台计算机。
单片机具有体积小、功能强、应用面广等优点,目前正以前所未见的速度取代着传统电子线路构成的经典系统,蚕食着传统数字电路与模拟电路固有的领地。
它的体积小、质量轻、价格便宜、为学习、应用和开发提供了便利条件。
同时,学习使用单片机了解计算机原理与结构的最佳选择。
现在,这种单片机的使用领域已十分广泛。
彩电、冰箱、空调、录像机、VCD、遥控器、游戏机、电饭煲等无处不见单片机的影子,单片机早已深深地融入我们每个人的生活之中。
单片机能大大地提高这些产品的智能性,易用性及节能性等主要性能指标,给我们的生活带来舒适和方便的同时,在工农业生产上也极大地提高了生产效率和产品质量。
单片机按用途大体上可分为两类,一种是通用型单片机,另一种是专用型单片机。
单片机课程设计跑马灯的控制摘要:本设计选择对跑马灯的控制,先构思跑马灯实现预想效果,然后进行分析,根据要求编写程序,选择硬件端口,并进行调试致预想效果,最后浅谈课程设计的经历,以及总结。
目录一)课程设计的目的二)课程设计的要求三)流程图四)原理图五)程序语言六)总结七)参考资料设计题目:试设计一个闪烁跑马灯控制器,该控制器可以控制8个灯顺序亮灭。
当单片机上电后,8个灯依次从左向右亮,并且每个灯亮的时间为1秒钟。
这时,如果按钮K1按下,则灯亮的顺序是从右向左,同样,每个灯亮的时间是1秒钟。
这时,如果按下按钮K2,则此时,4个灯亮4个灯灭,延迟4秒钟以后,又开始从左向右点亮。
最后,若按下按钮K3,则全部灯亮。
此时若想再次点亮灯,必须重新上电。
题目分析:该题目要求控制8盏灯的亮灭,可使用单片机的P1.0到P1.8口来控制。
按钮K1用P3.4口,K2用P3.2口,及外部中断0,K3用P3.3口,及外部中断1,分别来实现。
单片机使用AT89C52,电源使用5V标准电源。
顺序亮灭使用外部中断源构成循环控制语句。
一、课程设计的目的课程设计是本专业集中实践环节的主要内容之一。
训练正确地应用单片机,培养解决工业控制、工业检测等领域具体问题的能力。
学生通过所做课题,熟悉单片机应用系统开发研制的过程,软硬件设计的工作方法、内容及步骤,对学生进行基本技能训练。
例如组成系统、编程、调试、绘图等。
使学生理论联系实际,提高动手能力和分析问题、解决问题的能力。
通过本课程设计,主要达到以下目的:1.使学生增进对单片机的感性认识,加深对单片机理论方面的理解。
2.使学生掌握单片机的内部功能模块的应用,如定时器/计数器、中断、片内外存贮器、I/O口、串行口通讯等。
3.使学生了解和掌握单片机应用系统的软/硬件设计过程、方法及实现,为以后设计和实现单片机应用系统打下良好基础。
二、课程设计的要求1.学生需认真阅读课程设计任务书,熟悉有关设计资料及参考资料,熟悉各种设计规范的有关内容,认真完成任务书规定的设计内容。
目录1 实验目的 (1)2 元器件清单及简介 (1)3 设计原理及分析 (1)3.1 主要设计要求 (1)3.2 实验总流程图 (2)3.3 实验总图及说明 (3)4 实验中的问题与改进 (3)5 总结 (4)5.1 四级调速 (4)5.2 跑马灯闪烁方向的改变 (5)5.3 跑马灯循环闪烁灯的个数的改变 (6)6 实验分析与心得 (7)参考文献: (9)附录............................................... 错误!未定义书签。
基于AT89C51单片机的跑马灯电路课程设计1实验目的了解AT89C51管脚的基本功能,学会运用Proteus 7.7设计电路,学会运用汇编语言编写程序,来实现跑马灯的左右转换、0.1ms,0.25ms,0.5ms,1ms的四级变速、灯的闪烁个数为1,2,3,4等功能。
使用KEIL C51设计单片机程序,生成HEX文件,将程序烧录到AT89C51芯片中。
然后在实验电路中运行,调试。
2元器件清单及简介3设计原理及分析3.1主要设计要求1.灯的循环左右移动。
2.灯循环闪烁的个数可由1变到4。
3.灯循环闪烁的速度可变,分别是现0.1ms,0.25ms,0.5ms,和1ms的循环转变。
4.能在仿真图和面包板上进行实物运行并实现以上功能。
并能尽量节省器材。
3.2实验总流程图图1实验流程图3.3实验总图及说明图2 实验总图1.右边与P0口相连的8个灯采用上拉电阻方式,采用此方式是因为P0口驱动能力较大,且内部无上拉电阻,因此采用低电平驱动时,需加上拉电阻;且防止因电流过大而烧毁二极管。
2.左边依次与P1.0-P1.5的开关K0、K1、K2、K3、K4、K5,右边与P2.0-P2.3依次相连开关为K6、K7、K8、K9。
3.K0、K1控制灯的闪烁方向;K2、K3、K4、K5控制跑马灯闪烁的速度;K6、K7、K8、K9控制跑马灯灯闪烁的个数。
4.当有开关按下时相应的P口被置0,定时器中扫描P口程序扫描到相应P口为低电平,从而转到相应子程序执行,从而达到1所说功能。
采用调用51自带的左移右移函数实现彩灯闪烁控制论彩灯闪烁控制,也称为跑马灯,是一种常见的照明应用。
在这个项目中,我们将使用51单片机的左移和右移函数来实现彩灯的跑马灯效果。
首先,我们需要知道51单片机的左移和右移操作。
在51单片机中,左移操作符<<表示将一些数的二进制表示向左移动n位,右边用0填充。
右移操作符>>表示将一些数的二进制表示向右移动n位,左边用符号位填充。
这两个操作都是逻辑操作,不会改变数的符号。
接下来,我们可以使用51单片机的GPIO口来控制彩灯的亮和暗。
假设我们使用8个LED灯,那么我们就需要8个GPIO口来控制每个LED的亮灭。
以下是利用左移和右移函数实现彩灯闪烁控制的基本步骤:1.设置51单片机的GPIO口为输出模式,用于控制LED灯。
2.初始化闪烁控制变量和计数器变量。
3.使用一个循环来不断更新LED灯的状态。
4.在循环中,通过调用左移和右移函数,根据计数器变量的值来更新LED灯的状态。
5.控制LED灯的亮和暗,可以使用51单片机的GPIO口的高电平和低电平来实现。
6.根据需要,可以调整闪烁速度和亮灭的模式。
下面是一个简单的示例程序:```c#include <reg51.h>sbit led1 = P1^0; // 假设P1口连接第一个LED灯sbit led2 = P1^1; // 假设P1口连接第二个LED灯//...//假设P1口连接第八个LED灯void delay(unsigned int count)unsigned int i, j;for(i = 0; i < count; i++)for(j = 0; j < 120; j++);void maiunsigned int count = 0;//初始化GPIO口led1 = 0;led2 = 0;//...//初始化其它LED灯while(1)//更新LED灯的状态led1 = count & 0x01;led2 = count & 0x02;//...//更新其它LED灯的状态//控制LED灯的亮和暗delay(1000); // 控制闪烁速度led1 = 0;led2 = 0;//...//控制其它LED灯的亮和暗//更新计数器变量count = (count << 1) , (count >> 7); // 控制左移和右移的位数和方向}```以上示例程序只是一个简单的跑马灯实现,具体的实现方式和效果可以根据实际需求进行调整。
一、设计目的根据单片机系统开发与应用课程所学的概念、理论和方法,按照一般的单片机系统的开发过程,以Proteus7.5sp3为平台,Keil C51 V9.00 uVision4为软件开发工具,设计出一个适当难度的单片机系统;进一步掌握51单片机体系结构和单片机系统。
使学生能理论联系实际,加深和巩固所学的理论知识,提高学生的实践能力和单片机系统的综合运用能力。
二、设计内容1、以Proteus7.5sp3为平台,设计出硬件系统;2、以Keil C51 V9.00 uVision4为软件开发工具,编制程序实现如下功能:实现单片机控制P1口的8个LED灯花样走马灯,要求连续实现以下四种效果:(1)单灯左移;(2)单灯右移;(3)单灯逐个点亮接着逐个熄灭(4)两边向中间逐个点亮接着中间向两边逐个熄灭。
(灯亮和灯灭的时间均为1S。
指示灯亮和灭的时间可以通过按键设定,使用两个按键,其中一个按键每按一下,灯亮和灯灭的时、间增加1S,另一个按键每按一下,灯亮和灯灭的时间减少一秒。
);3、所有的源代码均在加上详细的注释;4、画出程序流程图;5、要有软硬件联调的操作及截图。
三、操作步骤1、绘制电路原理图(1)点击“开始”-〉“程序”按钮,运行ISIS 7 Professional,进入Proteus ISIS集成环境,Proteus ISIS 7的界面如图1所示。
图1 Proteus ISIS 7的编辑界面(2)将所需元器件加入到对象选择器窗口单击对象选择器按钮P,在弹出的“Pick Devices”页面中,使用搜索引擎在”Keywords”栏中分别输入”AT89C51“、”LED-BIBY“,在搜索结果”Results”栏中找到该对象,并将其添加至对象选择器窗口。
(3)放置元器件至原理图编辑窗口将“AT89C51”、“LED-BIBY”放置到原理图编辑窗口,如图2所示。
图2 放置元器件至图形编辑窗口(4)添加电源单击绘图工具栏中的Inter-sheet Terminal按钮,在对象选择器窗口选中对象“POWER”将其放置到原理图编辑窗口。
一、实训目的1. 熟悉单片机的硬件结构和基本工作原理;2. 掌握单片机编程方法,实现跑马灯功能;3. 提高实际操作能力和问题解决能力。
二、实训内容1. 跑马灯电路设计;2. 单片机编程实现跑马灯功能;3. 跑马灯功能测试与调试。
三、实训原理跑马灯是一种常见的电子玩具,主要由单片机、LED灯、按键等组成。
通过单片机控制LED灯的亮灭,实现跑马灯效果。
本实训采用AT89C51单片机作为核心控制单元,通过编程实现跑马灯功能。
四、实训步骤1. 跑马灯电路设计(1)硬件选型:选用AT89C51单片机作为核心控制单元,8个LED灯作为显示单元,2个按键作为控制单元。
(2)电路连接:将AT89C51单片机的P1口与LED灯的正极相连,LED灯的负极通过限流电阻连接到地。
将两个按键分别连接到单片机的P3.0和P3.1口。
2. 单片机编程实现跑马灯功能(1)初始化:设置P1口为输出端口,P3.0和P3.1口为输入端口。
(2)跑马灯程序编写:```c#include <reg51.h>#define LED P1void delay(unsigned int t) {unsigned int i, j;for (i = 0; i < t; i++)for (j = 0; j < 1275; j++); }void main() {unsigned char i = 0;while (1) {LED = 0x01; // 点亮LED1delay(500);LED = 0x02; // 点亮LED2delay(500);LED = 0x04; // 点亮LED3delay(500);LED = 0x08; // 点亮LED4delay(500);LED = 0x10; // 点亮LED5delay(500);LED = 0x20; // 点亮LED6delay(500);LED = 0x40; // 点亮LED7delay(500);LED = 0x80; // 点亮LED8delay(500);for (i = 0; i < 8; i++) {LED = ~(0x01 << i); // 倒序点亮LEDdelay(500);}}}```3. 跑马灯功能测试与调试(1)测试:将编写好的程序烧录到AT89C51单片机中,观察LED灯的跑马灯效果。
跑马灯和流水灯的区别是什么?单片机如何控制LED灯?
一、跑马灯和流水灯的区别
好多人分不清跑马灯和流水灯,还以为是同一种状态,虽然难度等级是一样的,但是灯的亮灭显示方式是不一样的。
请看下图
二、单片机控制LED灯的常用电路接法
弄清楚跑马灯的显示状态后可以开始进行设计了,在日常的跑马灯设计电路中LED灯一般接为这两种形式,共电源或共地,也就是通常说的灌电流式和拉电流式
三、电路分析与编程
大家可以根据自己实际的电路需要选择其中一种接法,由于AT89S52单片机IO端口不操作时是高电平所以下面我选择的是共电源接法。
电路分析:当电路输出高电平[端口为1]LED灯灭,当电路输出低电平[端口为0]LED灯亮
大家可以按照自己的思路编程,方法不唯一,下面我将介绍3种方法方法一:不利用算法,直接使用IO控制[可以说是最蠢的方法,但是一样能实现效果,并且容易理解]
#include 《reg52.h》
//LED输出端口位定义
sbit led0=P0。
八路跑马灯一、实验目的与要求(1)熟悉单片机实验开发装置实验台上的资源,学会选用其功能电路,连接组成实验需要的系统;(2)学习并了解MCS-51单片机P1口的应用及使用方法;(3)学习编写接口应用程序及延时子程序;(4)编写实验程序,实现从P0口输出信号驱动发光二极管L1~L8动态点亮的功能;二、二、实验程序功能延时实现LED流水灯效果,p1端口的八个灯作跑马灯。
在本实验中,P1作为输出口,接8只发光二极管,编写程序,使发光二极管循环点亮。
本例实验主要用到了延时子程序,CLR、AJMP、RRC、RLC、CALL等指令,通过轮流点亮P0.0…..P0.7实现效果。
程序功能:(1)使8个跑马灯从右至左依次点亮点亮;(2)再使跑马灯从左至右依次点亮;(3)一个循环结束后接着按上面的一二步骤循环;三、实验电路原理图及硬件接线图1.1 电路原理图硬件接线:把“单片机系统”区域中的P1.0-P1.7用8芯排线连接到“八路发光二极管指示模块”区域中的L1-L8端口上,要求:P1.0对应着L1,P1.1对应着L2,……,P1.7对应着L8。
四、实验程序○1程序内容ORG 0000HAJMP STARTORG 0030hSTART:MOV A,#0FFHCLR CMOV R1,#08H ;循环八次。
LOOP: RLC A ;带进位左移。
MOV P1,A ;输出到P1口。
CALL DELAY ;延时一段时间DJNZ R2,LOOP ;反复循环MOV R2,#07H ;再往回循环。
LOOP1: RRC A ;带进位右移MOV P1,A ;输出到P1口。
CALL DELAY ;延时一段时间DJNZ R2,LOOP1 ;反复循环JMP START ;重新开始DELAY: MOV R3,#20 ;延时子程序D1: MOV R4, #20D2: MOV R5, #248DJNZ R5, $DJNZ R4, D2DJNZ R3, D1RET○2基本工作原理:我们可以运用输出端口指令MOV P1,A或MOV P1,#DATA,只要给累加器值或常数值,然后执行上述的指令,即可达到输出控制的动作。
目录实验一跑马灯实验 (1)实验二按键输入实验 (3)实验三串口实验 (5)实验四外部中断实验 (8)实验五独立看门狗实验 (11)实验七定时器中断实验 (13)实验十三ADC实验 (15)实验十五DMA实验 (17)实验十六I2C 实验 (21)实验十七SPI 实验 (24)实验二十一红外遥控实验 (27)实验二十二DS18B20实验 (30)1 / 32'.实验一跑马灯实验一.实验简介我的第一个实验,跑马灯实验。
二.实验目的掌握STM32 开发环境,掌握从无到有的构建工程。
三.实验内容熟悉MDK KEIL 开发环境,构建基于固件库的工程,编写代码实现跑马灯工程。
通过ISP 下载代码到实验板,查看运行结果。
使用JLINK 下载代码到目标板,查看运行结果,使用JLINK 在线调试。
四.实验设备硬件部分:PC计算机(宿主机)、亮点STM32实验板、JLINK。
软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。
五.实验步骤1.熟悉MDK KEIL 开发环境2.熟悉串口编程软件ISP3.查看固件库结构和文件4.建立工程目录,复制库文件5.建立和配置工程6. 编写代码7. 编译代码8.使用ISP下载到实验板9.测试运行结果10.使用JLINK 下载到实验板11.单步调试12. 记录实验过程,撰写实验报告六.实验结果及测试源代码:int main(void}<5tm32_Clock_IniC (9); /,耒红对甘去置delay^init (72 >; "延吋初始<tLED Tnit:C>;"初维花与LED连接的硬伴接口while tl){匚EDO=O;匸ED1=1;de .lay ms (300 J ;LEDO=1;LEDL-0;delay ms(3"0^;两个灯LEDO与LED1实现交替闪烁的类跑马灯效果,每300ms闪烁一次。