安装Linux系统到开发板——移植类
- 格式:doc
- 大小:1.04 MB
- 文档页数:4

TQ2440开发板使用手册包含以下内容:一、硬件概述1. 开发板简介:TQ2440是一款基于Samsung S3C2440A处理器的ARM9开发板,配备了丰富的外围接口和扩展资源,适用于嵌入式系统学习和开发。
2. 硬件资源:TQ2440开发板提供了多种硬件资源,包括存储器、GPIO、UART、I2C、SPI、ADC、PWM、SD卡接口等。
3. 开发板结构:介绍了开发板的布局、主要芯片和接口的位置及功能。
二、开发环境搭建1. 开发工具:介绍了用于TQ2440开发板的开发工具,如交叉编译器、调试器等。
2. 开发环境配置:详细说明了如何配置开发环境,包括安装交叉编译器、设置环境变量等。
3. 编译和烧写程序:介绍了如何编译和烧写程序到TQ2440开发板上。
三、基础实验1. LED实验:通过控制GPIO口实现LED灯的亮灭。
2. UART实验:通过UART接口实现串口通信,可以与其他设备或电脑进行数据传输。
3. ADC实验:通过ADC接口采集模拟信号,并将其转换为数字信号进行处理。
4. PWM实验:通过PWM接口生成脉冲宽度调制信号,可用于电机控制等应用。
5. I2C实验:通过I2C接口实现与I2C设备的通信,如EEPROM、温度传感器等。
6. SPI实验:通过SPI接口实现与SPI设备的通信,如SD卡、FLASH等。
7. 中断实验:介绍了如何使用中断服务程序处理外部事件或定时任务。
8. SDRAM实验:通过操作SDRAM实现大容量数据的存储和访问。
9. FLASH实验:通过操作FLASH实现程序的固化和数据的非易失性存储。
四、高级应用1. Linux系统移植:介绍了如何在TQ2440开发板上移植Linux 操作系统。
2. 文件系统操作:介绍了如何在TQ2440开发板上实现文件系统的挂载和操作。
3. 网络通信:介绍了如何在TQ2440开发板上实现网络通信功能,包括以太网和WIFI等。
4. USB设备驱动:介绍了如何在TQ2440开发板上实现USB设备的驱动和应用。

MIPS体系下的linux移植研究与实现的开题报告一、选题背景与意义随着嵌入式技术的快速发展,越来越多的设备将采用MIPS架构,如路由器、网络存储设备等,这些设备都需要运行嵌入式操作系统,如Linux等。
因此,针对MIPS体系下的Linux移植研究和实现具有很高的实际意义。
二、研究内容本次研究的主要内容包括以下几个方面:1. MIPS体系结构的概述和特点。
2. Linux操作系统的移植原理和方法。
3. MIPS体系下的Linux内核移植研究和实现。
4. MIPS体系下的Linux应用程序移植研究和实现。
5. 移植后的Linux系统的测试和优化。
三、研究方法本次研究将采用以下方法:1. 研究MIPS体系结构的基本原理和特点。
2. 研究Linux操作系统的移植原理和方法。
3. 在开发板上搭建MIPS体系下的Linux开发环境。
4. 移植Linux内核,并编译生成可运行的内核镜像。
5. 移植Linux应用程序,并编译生成可运行的应用程序。
6. 测试和优化移植后的Linux系统。
四、预期成果本次研究的预期成果包括:1. 理解MIPS体系结构的基本原理和特点。
2. 熟练掌握Linux操作系统的移植原理和方法。
3. 在开发板上搭建MIPS体系下的Linux开发环境。
4. 成功移植Linux内核,并编译生成可运行的内核镜像。
5. 成功移植Linux应用程序,并编译生成可运行的应用程序。
6. 对移植后的Linux系统进行测试和优化,使得系统能够稳定运行。
五、研究进度安排本研究的进度安排如下:第一阶段(1周):深入研究MIPS体系结构的基本原理和特点。
第二阶段(2周):学习Linux操作系统的移植原理和方法,并在开发板上搭建MIPS体系下的Linux开发环境。
第三阶段(2周):对Linux内核进行移植,并编译生成可运行的内核镜像。
第四阶段(2周):对Linux应用程序进行移植,并编译生成可运行的应用程序。
第五阶段(1周):对移植后的Linux系统进行测试和优化。
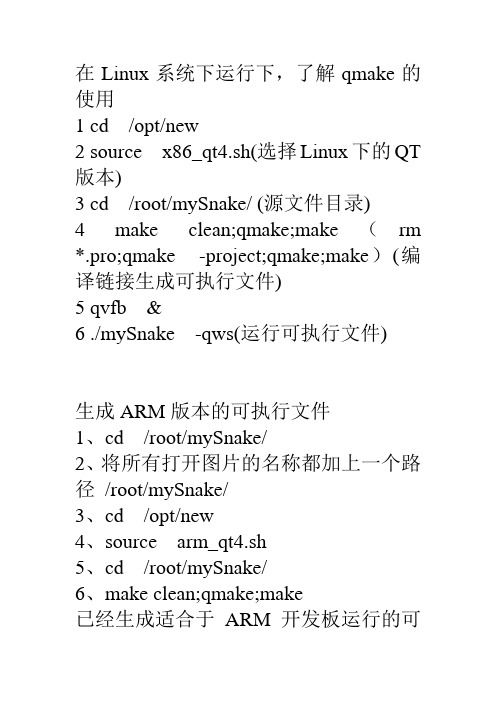
在Linux系统下运行下,了解qmake的使用1 cd /opt/new2 source x86_qt4.sh(选择Linux下的QT 版本)3 cd /root/mySnake/ (源文件目录)4 make clean;qmake;make(rm *.pro;qmake -project;qmake;make)(编译链接生成可执行文件)5 qvfb &6 ./mySnake -qws(运行可执行文件)生成ARM版本的可执行文件1、cd /root/mySnake/2、将所有打开图片的名称都加上一个路径/root/mySnake/3、cd /opt/new4、source arm_qt4.sh5、cd /root/mySnake/6、make clean;qmake;make已经生成适合于ARM开发板运行的可执行文件7、将可执行文件、所有的图片单独拿出来,放在同一个文件夹下面8、打包压缩该文件夹(cd /root tar –zcvf mySnake.tar.gz mySnake)移植1、开发板和电脑通过串口线连接2、打开超级终端,创建连接3、把前面的压缩包发送到开发板上(cd/root 右键发送)4、解压缩tar -zxvf mySnake.tar.gz5、cd mySnake/6、chmod 777 mySnake7、改配置文件vi /etc/init.d/rcS /bin/qt4 & 退出用:q8、vi /bin/qt4 加入按i进入编辑模式,可以修改该文件。
修改完这个文件,按ESC,后:wqLD_LIBRARY_PATH=/usr/local/Trolltech /QtEmbedded-4.7.0-arm/libexport LD_LIBRARY_PATH/root/mySnake/mySnake -qws & 9、reboot。

Linux3.0.8平台搭建移植文档——I2C触摸屏移植1.I2C子系统goodix电容屏采用I2C接口与处理器连接,我们要首先确保linux内核拥有对I2C子系统的支持,下面我们从子系统的配置和电容屏驱动两个方面进行移植修改1)配置I2C子系统支持#make menuconfigDevice Drivers ---><*> I2C support --->[*] Enable compatibility bits for old user-space (NEW)<*> I2C device interface< > I2C bus multiplexing support (NEW)[*] Autoselect pertinent helper modules (NEW)I2C Hardware Bus support --->进入I2C Hardware Bus support选项,选中以下内容:*** I2C system bus drivers (mostly embedded / system-on-chip) ***< > Synopsys DesignWare (NEW)<*> GPIO-based bitbanging I2C< > OpenCores I2C Controller (NEW)< > PCA9564/PCA9665 as platform device (NEW)<*> S3C2410 I2C Driver< > Simtec Generic I2C interface (NEW)...2.GOODIX电容屏移植1)添加goodix电容屏驱动将“goodix_touch.c”文件copy到drivers/input/touchscreen/目录下,并将"goodix_touch.h"、"goodix_queue.h"文件copy到include/linux/目录下,并修改Kconfig文件及Makefile文件支持触摸屏驱动的配置和编译#vi driver/input/touchscreen/Kconfig在config TOUCHSCREEN_TPS6507X选项的后面添加以下内容:config TOUCHSCREEN_GOODIXtristate "GOODIX based touchscreen"depends on I2ChelpIt is a android driver to support Gooidx's touchscreen whose nameis guitar on s5pv210 platform. The touchscreen can support multi-touch not more than two fingers.Say Y here to enable the driver for the touchscreen on theS5V SMDK board.If unsure, say N.To compile this driver as a module, choose M here:the module will be called goodix_touch.ko.#vi driver/input/touchscreen/Makefile在文件最后添加如下内容:obj-$(CONFIG_TOUCHSCREEN_GOODIX) += goodix_touch.o2)添加i2c_board_info资源(电容屏)#vi arch/arm/mach-s5pv210/mach-smdkv210.c在smdkv210_i2c_devs0结构体数组定义中添加以下内容:...{ I2C_BOARD_INFO("24c08", 0x50), }, /* Samsung S524AD0XD1 */ { I2C_BOARD_INFO("wm8580", 0x1b), },{I2C_BOARD_INFO("Goodix-TS", 0x55),.irq = IRQ_EINT(4),},...3)配置电容屏选项#make menuconfigDevice Drivers --->Input device support --->...[*] Touchscreens ---><*> GOODIX based touchscreen4)make将在arch/arm/boot/下生成编译好的可执行程序zImage下载到开发板即可,执行命令“cat /dev/input/event0”,然后用手触摸屏幕会在终端看到输出打印的乱码信息,表示移植成功,如果没有打印信息或没有“/dev/input/event0”这个设备说明移植失败。
linux引导之grub2先了解下什么是Bootloader以下是百度百科释意在嵌⼊式操作系统中,BootLoader是在内核运⾏之前运⾏。
可以初始化硬件设备、建⽴内存空间映射图,从⽽将系统的软硬件环境带到⼀个合适状态,以便为最终调⽤准备好正确的环境。
在中,通常并没有像BIOS那样的程序(注,有的嵌⼊式CPU也会内嵌⼀段短⼩的启动程序),因此整个系统的加载启动任务就完全由BootLoader来完成。
在⼀个基于ARM7TDMI core的中,系统在上电或复位时通常都从地址0x00000000处开始执⾏,⽽在这个地址处安排的通常就是系统的BootLoader程序Bootloader不属于操作系统,⼀般采⽤汇编语⾔和C语⾔开发。
需要针对特定的硬件平台编写。
在移植过程时,⾸先为开发板移植Bootloader。
Bootloader不但依赖于CPU的体系架构,⽽且依赖于嵌⼊式系统板级设备的配置。
3.Bootloader的操作模式⾃启动模式:在这种模式下,Bootloader从⽬标机上的某个固态存储设备上将操作系统加载到RAM中运⾏,整个过程并没有⽤户的介⼊。
交互模式:在这种模式下,⽬标机上的Bootloader将通过串⼝或⽹络等通信⼿段从开发板上下载内核映射和根⽂件系统映像等待RAM中。
可以被Bootloader写到⽬标机上的固态存储媒介质中,或者直接进⼊系统的引导。
也可以通过串⼝接收⽤户的指令。
⼆、Bootloader的基本功能初始化相关硬件把Bootloader⾃搬移到内存中执⾏⽤户指令加载并执⾏内核⼀个嵌⼊式系统从软件的⾓度看通常可以分为三个层次: 1、引导加载程序。
包括固化在固件(firmware)中的Booter代码(可选),和Loader两⼤部分。
2、操作系统。
特定于嵌⼊式板⼦的定制内核以及内核的启动参数;以及在内核和应⽤程序之间可能还会包括⼀个嵌⼊式图形⽤户界⾯,常⽤的嵌⼊式GUI有:MicroWindows和MiniGUI等。
华清远见<嵌入式Linux 系统开发班>培训教材“黑色经典”系列之《嵌入式Linux 系统开发技术详解——基于ARM 》U-Boot 软件开发6.1 Bootloader对于计算机系统来说,从开机上电到操作系统启动需要一个引导过程。
嵌入式Linux系统同样离不开引导程序,这个引导程序就叫作Bootloader。
6.1.1 Bootloader介绍Bootloader是在操作系统运行之前执行的一段小程序。
通过这段小程序,我们可以初始化硬件设备、建立内存空间的映射表,从而建立适当的系统软硬件环境,为最终调用操作系统内核做好准备。
对于嵌入式系统,Bootloader是基于特定硬件平台来实现的。
因此,几乎不可能为所有的嵌入式系统建立一个通用的Bootloader,不同的处理器架构都有不同的Bootloader。
Bootloader不但依赖于CPU的体系结构,而且依赖于嵌入式系统板级设备的配置。
对于2块不同的嵌入式板而言,即使它们使用同一种处理器,要想让运行在一块板子上的Bootloader 程序也能运行在另一块板子上,一般也都需要修改Bootloader的源程序。
反过来,大部分Bootloader仍然具有很多共性,某些Bootloader也能够支持多种体系结构的嵌入式系统。
例如,U-Boot就同时支持PowerPC、ARM、MIPS和X86等体系结构,支持的板子有上百种。
通常,它们都能够自动从存储介质上启动,都能够引导操作系统启动,并且大部分都可以支持串口和以太网接口。
本章将对各种Bootloader总结分类,分析它们的共同特点。
以U-Boot为例,详细讨论Bootloader的设计与实现。
6.1.2 Bootloader的启动Linux系统是通过Bootloader引导启动的。
一上电,就要执行Bootloader来初始化系统。
可以通过第4章的Linux启动过程框图回顾一下。
系统加电或复位后,所有CPU都会从某个地址开始执行,这是由处理器设计决定的。
系统移植安装步骤
1、总体安装步骤:
2、将Bootloader烧写进SD卡中
准备工作:SD卡(相机SD卡,大小4G或8G)+读卡器
操作:SD卡格式化(FAT32)———SD_Write以管理员身份运行——
加载进mmc_ram256.bin文件——取出SD卡
3、将SD卡加载进开发板中
准备资料:USB下载线、串口、电源、SD卡启动(ON:45678 OFF:
123)
1、笔记本电脑连接串口,需要安装CH340-USB转串口驱动。台式机
连接直接连接串口。
2、打开SecureCRT——选择快速连接——
协议选择serial串口,端口选择连
接的串口(台式机默认为com1,笔记本通过设备管理器查看),波特
率选择115200,流控勾全部取消——点击连接——按住键盘空格键,
打开开发板电源——进去如下界面——
选择【1】Format the nand flash清除flash——选择yes——选择
【3】Burn image from USB——选择Flash u_boot——进入界面
——通过linux与window的资料共享
工具Samba或Winscp 把两个文件放入linux的home
目录下——按住usb驱动,在linux系统的home执行中输入insmod
dnw_usb.ko——安装完成——linux界
面下点击usb图标——点击
connect连接——连接完毕——把文件放
入linux的home目录下——在linux输入,最后是开发板内存地址
50000000——如果出现
重启usb连接—
—在serial串口中选择【2】flash kernel
——把文件放入linux的home目录下——执行
——把
文件放入linux的home目录下——选择【3】
Flash system移植根文件——
执行——在
serial串口中表
示安装成功——关闭开发板电源,Nand Flash启动(ON:458 OFF:
12367)——打开开发板电源——等待直到serial中显示
——可以在开发板的液
晶屏执行,表示嵌入式已经移植到了开发板。