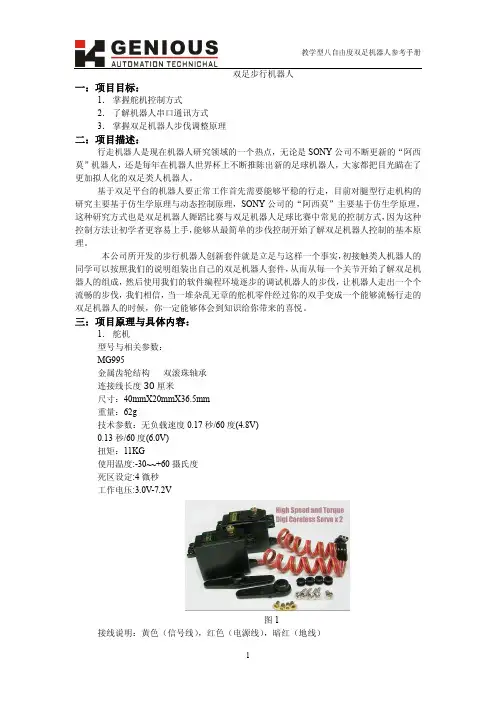
双足 机器人 行走 动作 调试 说明 人行
- 格式:ppt
- 大小:2.21 MB
- 文档页数:28
双足机器人走路原理
双足机器人是一种仿生机器人,可以模拟人类的行走方式。
它的行走原理基于人类行走的基本原理,即重心移动和步伐控制。
在双足机器人行走时,它需要保持平衡,这意味着它必须在每个时刻都能够控制自己的重心。
重心是指物体整体重力作用的中心点,双足机器人的重心位置直接影响着它的稳定性。
因此,双足机器人在行走时需要不断地调整重心位置。
步伐控制是双足机器人行走的另一个关键因素。
步伐是指双足机器人在行走中的步长和步频。
在行走过程中,双足机器人需要根据不同的速度和路线来调整步伐。
步伐控制通常由一个控制器来实现。
在双足机器人的行走中,还有一些其他因素也需要考虑,例如地形和外部环境。
为了让双足机器人能够适应不同的地形和环境,需要对其行走算法进行优化和调整。
总的来说,双足机器人的行走原理是基于人类行走的基本原理,并且需要考虑重心控制、步伐控制、地形和环境等因素。
这些因素共同作用,使得双足机器人能够实现高效的行走。
- 1 -。
双足机器人步行原理
双足机器人步行原理基于仿生学和机器人控制理论,旨在模拟人类的步行运动。
它主要基于以下原理和控制策略:
1. 动态平衡控制:双足机器人在行走过程中需要保持动态平衡,这意味着机器人需要时刻根据自身的姿态、行走速度和地面情况来调整步态和控制力矩,以保持机体的稳定。
2. 步态规划:双足机器人的步态规划决定了每一步腿的运动轨迹和步频。
一般来说,机器人上半身的重心会向前倾斜,然后交替迈步。
步态规划需要考虑腿部的受力、身体姿态、地面摩擦力等多个因素。
3. 步态控制:基于步态规划,机器人需要实现对每一步的力矩控制和低级关节控制。
这意味着机器人需要根据颈部、腰部、髋部、膝关节和脚踝关节的传感器反馈信息来调整关节的输出力和控制策略。
4. 感知与反馈:双足机器人需要运用各种传感器来感知自身的状态和周围环境,例如倾斜传感器、压力传感器、陀螺仪等。
这些传感器的数据能够提供给控制系统供其根据需要调整步行姿势和控制力矩。
5. 动力学控制:双足机器人需要考虑自身的动力学特性,以及地面反作用力的影响。
动力学控制通过综合各种传感器信息和动力学模型来计算机器人每一步所需的力矩,以提供足够的力量来维持步行。
综上所述,双足机器人步行的原理涉及动态平衡控制、步态规划、步态控制、感知与反馈以及动力学控制等多个方面。
通过精确的控制策略和高度集成的感知系统,机器人能够模拟人类的步行运动,并具备稳定的步行能力。
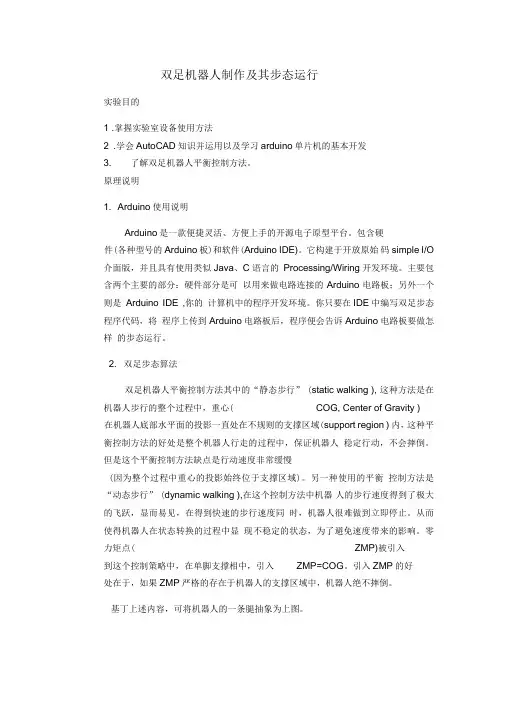
双足机器人制作及其步态运行实验目的1 .掌握实验室设备使用方法2 .学会AutoCAD知识并运用以及学习arduino单片机的基本开发3. 了解双足机器人平衡控制方法。
原理说明1. Arduino使用说明Arduino是一款便捷灵活、方便上手的开源电子原型平台。
包含硬件(各种型号的Arduino板)和软件(Arduino IDE)。
它构建于开放原始码simple I/O 介面版,并且具有使用类似Java、C语言的Processing/Wiring开发环境。
主要包含两个主要的部分:硬件部分是可以用来做电路连接的Arduino电路板;另外一个则是Arduino IDE ,你的计算机中的程序开发环境。
你只要在IDE中编写双足步态程序代码,将程序上传到Arduino电路板后,程序便会告诉Arduino电路板要做怎样的步态运行。
2. 双足步态算法双足机器人平衡控制方法其中的“静态步行” (static walking ), 这种方法是在机器人步行的整个过程中,重心( COG, Center of Gravity )在机器人底部水平面的投影一直处在不规则的支撑区域(support region ) 内,这种平衡控制方法的好处是整个机器人行走的过程中,保证机器人稳定行动,不会摔倒。
但是这个平衡控制方法缺点是行动速度非常缓慢(因为整个过程中重心的投影始终位于支撑区域)。
另一种使用的平衡控制方法是“动态步行” (dynamic walking ),在这个控制方法中机器人的步行速度得到了极大的飞跃,显而易见,在得到快速的步行速度同时,机器人很难做到立即停止。
从而使得机器人在状态转换的过程中显现不稳定的状态,为了避免速度带来的影响。
零力矩点( ZMP)被引入到这个控制策略中,在单脚支撑相中,引入ZMP=COG。
引入ZMP的好处在于,如果ZMP严格的存在于机器人的支撑区域中,机器人绝不摔倒。
基丁上述内容,可将机器人的一条腿抽象为上图。
两足行走机器人行走部分的设计两足行走机器人是一种仿人行走的机器人,它具有两只类似于人的腿部结构,可以模拟人类的行走动作。
设计一个有效的两足行走机器人行走部分需考虑以下几个方面:机器人的腿部结构、稳定性控制、行走模式选择和步态规划。
首先,机器人的腿部结构是两足行走机器人的核心组成部分。
腿部结构的设计决定了机器人行走的稳定性和自由度。
一个常见的设计是采用类似于人体的骨骼结构,包括大腿、小腿和脚。
每个腿部都通过关节连接,类似于人体的膝关节和踝关节。
关节可以采用电机控制,通过旋转关节来调整机器人的姿态和步态。
其次,稳定性控制是保证机器人行走稳定的重要因素。
机器人行走时会产生惯性力和外界力矩,稳定性控制可以通过传感器和控制算法来维持机器人的平衡。
传感器可以用来检测机器人的姿态,如倾斜角度和加速度。
控制算法则可以根据传感器的反馈信息,计算合适的关节角度和力矩,以保持机器人的平衡。
再次,行走模式选择是两足行走机器人的重要设计要素。
机器人可以选择不同的行走模式,如直线行走、踱步、跑步等。
每种行走模式都有各自的步态和关节运动方式。
选择合适的行走模式可以提高机器人的行走效率和稳定性。
行走模式的选择可以通过控制算法和输入信号来实现,比如输入一定的速度和方向信号,控制算法会选择合适的行走模式。
最后,步态规划是决定机器人腿部运动轨迹和关节运动方式的关键因素。
步态规划可以分为离散式和连续式两种方式。
离散式步态规划将机器人的行走过程分成多个步骤,在每个步骤中计算合适的关节角度和力矩,控制机器人行走。
连续式步态规划则通过数学模型和优化算法来计算机器人的关节角度和力矩,使机器人的行走过程更加连续和流畅。
综上所述,设计一个有效的两足行走机器人行走部分需要考虑机器人的腿部结构、稳定性控制、行走模式选择和步态规划等方面。
这些设计决策将直接影响机器人的行走效率和稳定性。
通过合理的设计和控制算法,可以使机器人实现类似于人类的行走动作,达到更高的行走性能和功能。
1 绪论两足步行机器人是指可以使用两只脚交替地抬起和放下,以适当的步伐运动的机器人,可分为拟人机器人和桌面型两足机器人 (仿人机器人)大小和人相似,不仅具有拟人的步行功能,而且通常还具有视觉、语音、触觉等一系列拟人的功能;桌面型两足机器人通常指体积较小,只具有步行功能及其他少数特定功能的两足机器人,例如具有步行功能和视觉功能的自主踢足球机器人。
与拟人机器人相比,桌面型两足步行机器人的成本较低,除了具有科研性外,还具有广泛地娱乐性,也可以应用在教学和比赛中。
国内外的机器人大赛中,常常可以看到桌面型两足步行机器人的身影[1]。
1.1 课题的研究背景和意义于两足步行机器人的拟人性和对环境良好的适应性等特点,受到各国政府和研究者的广泛重视,是当今世界的高新技术的代表之一。
它在科研、教学、比赛和娱乐等方面都很到了很好的应用。
江苏省大学生机器人大赛和全国大学生机器人大赛中经常有两足步行机器人,它可以参加舞蹈机器人比赛、两足竞走机器人比赛、Robocop类人组机器人踢足球[10]器人创新比赛、Robocop救援组比赛等。
舞蹈机器人比赛时使用了日本“KONDO”两足步行机器人,性能出众,发挥稳定,获得了舞蹈机器人比赛的冠军。
但是该机器人是集成度很高的商业产品,它的控制系统不开放底层代码,难以进行二次开发和步态研究。
所以本文基于机器人控制系统中常用的众多处理器和操作系统各自的特点,并结合“KONDO”机器人机械结构的特性,选用了高性能、低功耗的 8 位AVR® 微处理器内核处理器ATMega8P来实现对机器人的控制来。
设计的控制系统控制指令精简,控制转角精度高,波特率可以实时更改,体积小,重量轻,其可作为类人型机器人、仿生机器人、多自由度机械手的主控制器。
随着中国机械产业的不断进步,各高校相继开设机械类创新课程和比赛,学生可将其应用在各类机械创新作品中,优化控制系统参加比赛。
日本“KONDO”机器人如图1.1所示。
双足行走机器人稳定性控制方法双足行走机器人稳定性控制方法大连理工大学工程力学系李增刚1引言人作为双足行走生物,是在长期的生物进化过程中形成的。
人能够不自觉地保持身体的直立性和平衡性,不论是在静止不动还是在行走过程中。
一旦失去平衡,人就会产生相应的动作,使身体保持平衡。
例如,在静止时,当人的重心偏向一侧时,就会不自觉地向该侧跨出一脚,以使重心位置落于支撑面内。
这里,支撑面定义为两脚之间的面积以及两脚的面积。
当重心落于支撑面内时,就不会倾倒。
再如,在行走过程中,人的重心不断向前移动,超出了两脚尖的位置,迫使人向前迈出脚,这样才使人的行走成为可能,使人的行走自然流畅。
因此,控制机器人重心的位置及重心位置的速度,是机器人保持稳定及产生有效步态的关键。
本文就是控制机器人的重心位置,使其落于支撑面内,从而达到了机器人稳定性控制的目的。
机器人的重心可以由安装在机器人脚底的力传感器测知。
当重心偏向一侧,这一侧的传感器输出偏大,相反的一侧的力传感器等于零,或趋近于零。
本文用感知器来感知机器人重心位置的变化,当重心超出支撑面时,系统将发出动作指令,使机器人保持稳定。
本文采用的神经网络感知器(Perception)是最简单的人工神经网络,它是F Rosenblatt于 1958年提出的具有自学习能力的感知器。
在这种人工神经网络中,记忆的信息存储在连接权上,外部刺激通过连接通道自动激活相应的神经元,以达到自动识别的目的。
感知器模型如图1所示,通常由感知层S(Sensory)、连接层A(Association)和反应层构成R(Response)。
2人工神经元感知器的学习算法可以用下面的方法训练网络:(1)初始化S层至连接层(A层)的连接权矩阵中的各个元素及A层各单元的阀值赋予[-1,+1]之间的随机值,一般情况下vij =1θj=0i=1,2,Λ,pj=1,2,Λ,n且在整个学习过程中保持固定不变。
A层至输出层(R层)的连接权矩阵中的各个元素及 S层各单元的阀值θ=[θ1θ2Λθq]赋予[-1,+1]之间的随机值。
人形双足机器人运动算法人形双足机器人是一种模拟人类行走方式的机器人,它具有两只双足,可以通过运动算法实现自主行走。
本文将介绍人形双足机器人的运动算法原理及其应用。
一、人形双足机器人的运动算法原理人形双足机器人的运动算法是基于人类行走的生物力学原理和机器学习技术的结合。
它通过传感器获取环境信息,利用运动控制算法实现自主行走。
1. 步态生成算法步态是指人形双足机器人行走过程中的姿态和动作序列。
步态生成算法是通过模拟人类行走过程中的关节角度变化和身体重心的移动来生成机器人的步态。
常见的步态生成算法包括倒立摆步态和ZMP 控制算法。
倒立摆步态是一种基于动力学原理的步态生成算法,它通过控制机器人关节的角度和身体的倾斜,使机器人保持平衡。
倒立摆步态算法可以实现机器人的稳定行走,但对于不同地形和运动速度的适应性较差。
ZMP控制算法是一种基于力学原理的步态生成算法,它通过控制机器人身体的重心位置来保持平衡。
ZMP控制算法可以实现机器人在不同地形和运动速度下的稳定行走,并具有较好的适应性。
2. 动作规划算法动作规划算法是指根据机器人的运动需求和环境信息,生成机器人的运动轨迹和动作序列。
动作规划算法可以根据机器人的目标位置和障碍物位置,生成机器人的移动路径和避障动作。
常见的动作规划算法包括A*算法、D*算法和RRT算法。
A*算法是一种基于图搜索的动作规划算法,它通过计算机器人到目标位置的最短路径来生成机器人的运动轨迹。
D*算法是一种基于动态路径规划的算法,它可以在机器人运动过程中实时更新路径规划信息。
RRT算法是一种基于随机采样的动作规划算法,它通过随机采样和树搜索来生成机器人的运动路径。
二、人形双足机器人的应用人形双足机器人的运动算法在机器人领域有着广泛的应用。
下面将介绍几个典型的应用场景。
1. 服务机器人人形双足机器人可以应用于服务机器人领域,如导览机器人、接待机器人等。
通过运动算法,机器人可以实现自主行走,为用户提供导航、讲解等服务。
两足式自走机器人实验报告本实验旨在设计和制作一种能够实现自主行走的两足式机器人,并通过实验验证其稳定性和行走能力。
通过该实验,能够加深对机器人结构和运动控制的理解,同时探索机器人在不同环境下的适应能力。
实验原理:两足式机器人是一种模仿人类步行的机器人,其设计灵感来源于人类运动生理学和动物运动机制。
在机器人的机械结构上,通常采用两条类似于人的双腿,脚部配有足底传感器以获取地面信息。
控制系统利用回馈控制和动态平衡算法,实现机器人的稳定行走。
实验步骤和结果:1. 设计和制作机器人的机械结构:根据机器人的预期功能和要求,设计机器人的双腿结构,选择合适的材料进行制作。
通过螺旋电机和关节连接完成机械结构的组装。
2. 完成机器人的电子设计和控制系统的搭建:设计机器人的电子线路,包括传感器、执行机构和控制芯片等。
设置动态平衡算法和运动控制程序,并进行算法调试和优化。
3. 进行机器人的行走实验:将机器人放置在光滑的地面上,通过控制程序操控机器人进行行走。
观察机器人步态和姿态的稳定性,记录机器人的行走速度和穿越障碍物的能力。
通过实验,我们得到了以下结果:1. 机器人能够实现基本的稳定行走:机器人能够通过动态平衡算法保持两腿的平衡,保证机器人不倒下。
虽然在初期的测试中机器人有时会出现摇晃和摆动的情况,但经过算法的调优和参数的优化,机器人能够保持更好的稳定性。
2. 机器人的行走速度较慢:由于机器人使用的是电机驱动的关节,其速度受到电机的转速限制。
因此,机器人的行走速度相对较慢,需要进一步优化驱动系统以提高机器人的运动速度。
3. 机器人的障碍物穿越能力有待提高:在穿越障碍物的实验中,机器人会遇到平衡和稳定性的挑战。
当障碍物高度较高时,机器人容易失去平衡而倒下。
因此,需要改善机器人的感知和控制系统,提高其在复杂环境中的适应能力。
实验总结:通过本实验,我们成功设计和制作了一种两足式自走机器人,并验证了其行走能力和稳定性。
实验结果表明,机器人能够实现基本的稳定行走,但其行走速度和穿越障碍物的能力还有待提高。
双足机器人制作及其步态运行首先,在双足机器人的制作过程中,机械设计是一个重要的环节。
双足机器人需要设计适合人体行走的腿部结构,通常采用三自由度的设计,即腿部可以在水平方向上摆动、伸缩和旋转。
此外,机械设计还需要考虑到双足机器人的稳定性和承重能力,以确保机器人在行走时不会失去平衡。
其次,控制系统是双足机器人制作中不可或缺的一部分。
控制系统需要将运动指令转化为机械运动,使机器人能够按照设定的步态进行行走。
控制系统通常包括传感器、执行器和控制算法等多个组件。
传感器主要用于获取机器人当前的状态和环境信息,比如陀螺仪和加速度计可以用来检测机器人的倾斜角度和加速度;执行器则用于实现机器人的运动,比如电机可以驱动腿部关节的运动;控制算法则负责解析传感器的数据并控制执行器的运动。
最后,双足机器人的步态运行是整个制作过程中最具挑战性的一部分。
步态运行可以分为静态步态和动态步态两种。
静态步态是指机器人在行走过程中,保持至少有三只腿支撑在地面上,而剩余的腿则处于摆动中;动态步态则是指机器人在行走过程中,每一步都会有腿从摆动态转化为支撑态。
步态运行的关键在于如何控制机器人的稳定性和步幅,以确保机器人在行走时不会失去平衡。
为了实现双足机器人的步态运行,需要通过控制算法来对机器人的运动进行优化。
控制算法可以根据传感器获取的数据来调整机器人的姿态和步频,以保持机器人的稳定性和步幅。
常用的控制算法包括PID控制、模糊控制和强化学习等,这些算法通过对机器人的运动进行建模和优化,可以使机器人在行走时更加稳定和高效。
总的来说,双足机器人的制作和步态运行是一个综合性的任务,需要涉及到机械、控制和算法等多个领域的知识。
只有在这些领域的相互配合下,才能够制作出一个稳定、灵活的双足机器人,并使其能够模仿人类的行走方式。
随着科技的不断发展,双足机器人的制作和步态运行将会变得更加成熟和先进,为人类带来更多的便利和可能性。
并联五连杆点足式双足机器人稳定行走控制方法哎呀,这个话题听起来就挺高大上的,不过别担心,咱们今天就用大白话聊聊这个并联五连杆点足式双足机器人的稳定行走控制方法,就像咱们平时聊天一样轻松。
首先,咱们得明白,这个机器人啊,就像人一样,有两条腿,但是它的腿是由五个连杆组成的,这种设计让它能更灵活地移动。
点足式呢,就是说它的脚是点接触地面的,这样能减少摩擦,走起来更顺滑。
咱们先从机器人的脚说起。
想象一下,你穿着一双超级灵活的鞋子,这鞋子能让你的脚在各种地面上都能稳稳地走。
机器人的脚也是这样,它的设计要考虑到各种不同的地面,比如平地、斜坡、甚至是不平整的地面。
为了让机器人能稳稳地走,它的脚需要能够适应这些不同的地面,这就是所谓的“自适应”。
接下来,咱们聊聊这个并联五连杆。
这个设计就像是人的膝关节和踝关节,它们能让机器人的腿做出各种复杂的动作。
但是,这些动作得控制得恰到好处,不然机器人走起来就会摇摇晃晃,甚至摔倒。
所以,控制这些连杆的动作就成了关键。
说到控制,这就涉及到算法了。
想象一下,你走路的时候,大脑是怎么控制你的腿的?你得保持平衡,还得调整步伐。
机器人也是这样,它需要一个算法来告诉它怎么控制这些连杆,让它能保持平衡,还能调整步伐。
这个算法得考虑到机器人的重心,还有它的动作,这样才能保证它走起来既稳定又高效。
举个例子,假设机器人现在要上一个台阶。
它得先判断台阶的高度,然后调整脚的位置,接着控制连杆的动作,让自己能稳稳地踏上台阶。
这个过程中,算法得实时调整,保证机器人的每一步都是准确的。
最后,咱们得说说测试。
就像你学骑自行车一样,你得先在平地上练习,然后慢慢尝试上坡下坡。
机器人也是这样,它得在各种环境下测试,看看它的行走控制方法是否有效。
这个测试过程可能很漫长,但是非常必要,因为只有通过测试,我们才能知道机器人在实际环境中的表现如何。
总之,这个并联五连杆点足式双足机器人的稳定行走控制方法,就像是教一个小孩子学走路。
双足机器人的行走控制与仿真双足机器人是一种复杂的人造机器人,它可以模拟人类的步态进行行走。
在当今科技的发展中,双足机器人的应用越来越广泛,例如在残疾人康复、足球比赛和军事领域等方面都起着重要的作用。
为了实现双足机器人的高效和安全行走,需要进行行走控制和仿真的研究。
一、双足机器人的行走控制在双足机器人的行走控制中,主要有以下几个方面的技术:1. 步态规划步态规划是指为双足机器人规划一套合理的步态方式,让机器人可以稳定地进行行走。
在步态规划中,需要考虑足端和身体的着地位置、步态周期、步幅和步速等因素。
通过这些规划,可以使双足机器人实现更加灵活、平稳的步态。
2. 动力学控制动力学控制是指控制机器人进行行走时,根据机器人当前的状态、环境变化和任务需求,及时调整机器人的姿态,实现稳定的步态。
在动力学控制中,需要考虑机器人的平衡性、稳定性和动态性。
3. 路径跟踪控制路径跟踪控制是指通过计算机控制双足机器人的步伐,由计算机控制机器人按照预设的路径进行行走。
这种控制方法可以更加稳定地控制机器人步态,减少机器人的倒地风险。
二、双足机器人的仿真双足机器人的仿真是指通过计算机模拟实际的机器人操作和环境,以验证双足机器人的行走控制算法和策略。
通过仿真,可以更加准确地评估双足机器人的性能,从而为实际应用提供优秀的参考。
1. 建立仿真模型建立双足机器人的仿真模型是仿真的首要步骤。
在建立仿真模型时,需要考虑双足机器人的几何结构、质量、动力学特性等因素。
通过数学建模和仿真建模软件,可以构建出一个符合实际情况的双足机器人模型,以便进一步进行仿真分析和测试。
2. 仿真分析仿真分析是通过模拟实际情况,测试控制算法和策略的有效性。
在仿真分析中,可以模拟不同的运动状态、环境因素和操作要求,验证不同的控制方案和策略。
仿真分析可以大幅度缩短实际测试时间和成本,并可以重复测试以进行验证。
3. 仿真优化双足机器人的仿真优化是指通过仿真结果分析,改进双足机器人的行走控制算法和策略,提高双足机器人的稳定性、灵活性和交互性。