进化算法的PID参数最优设计
- 格式:pdf
- 大小:156.91 KB
- 文档页数:4
遗传算法入门实例:对PID参数寻优[原创][这乌龟飙得好快啊]开始之前:假设你已经:能运用C语言,初步了解PID、遗传算法的原理。
遗传算法能干什么?(我有个毛病:每当遇到一个东东,我首先会设法知道:这个东东能干什么呢?)遗传算法可以解决非线性、难以用数学描述的复杂问题。
也许这样的陈述让你觉得很抽象,把它换成白话说就是:有个问题我不知道甚至不可能用数学的方法去推导、解算,那么也许我就可以用遗传算法来解决。
遗传算法的优点是:你不需要知道怎么去解决一个问题; 你需要知道的仅仅是,用怎么的方式对可行解进行编码,使得它能能被遗传算法机制所利用。
如果你运用过PID来控制某个系统,那你一定非常清楚:PID麻烦就在那三个参量的调整上,很多介绍PID的书上常搬一些已知数学模型的系统来做实例环节,但事实上我们面对的往往是不可能用数学模型描述的系统,这个时候该怎么取PID的参值呢?1、可以依靠经验凑试,耗时耗精力。
2、离线规划,这就是下文要做的事情3、在线规划,比方说神经网络PID(后续文章将推出,做个广告先^_^)。
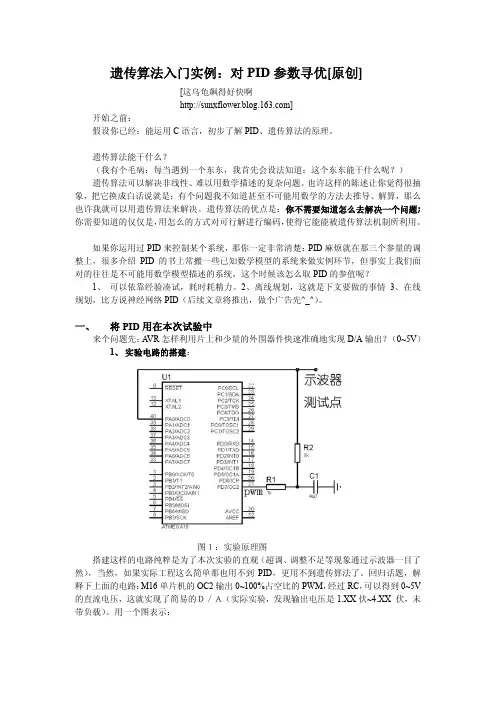
一、 将PID用在本次试验中来个问题先:A VR怎样利用片上和少量的外围器件快速准确地实现D/A输出?(0~5V)1、实验电路的搭建:图1:实验原理图搭建这样的电路纯粹是为了本次实验的直观(超调、调整不足等现象通过示波器一目了然),当然,如果实际工程这么简单那也用不到PID,更用不到遗传算法了。
回归话题,解释下上面的电路:M16单片机的OC2输出0~100%占空比的PWM,经过RC,可以得到0~5V 的直流电压,这就实现了简易的D/A(实际实验,发现输出电压是1.XX伏~4.XX 伏,未带负载)。
用一个图表示:这个时候如果我要输出 3.5V (可以是其它值)电压,该加怎样的PWM呢?(有个简单的方法:标定,但是这种方法系统调整响应速度较为缓慢,理由见图5下附言)也许我们可以把这个输出电压加到A/D反馈到系统,这样就形成了闭环控制:系统输出PWM ——>> PWM 转换成电压——>>A/D 采集,获得实际值与目标值的偏差(例如3.5V )——>>将偏差进行PID 加载到PWM 输出(然后输出又影响下一次的输入……)把示波器加到测试点上,调整扫描周期,使示波器能看到完整的一个调整过程。
文章编号:1006-6705(2001)03-0004-03收稿日期:2001-05-14作者简介:李剑(1978-),女,重庆人,华北电力大学硕士生,从事自动控制在电厂中的应用研究。
PID 参数整定方法进展李 剑,谷俊杰(华北电力大学动力系,河北保定071003)Development of Tuning Methods for PID ParametersL I Jian ,GU J un -jie(North China Electric Power University ,Baoding 071003,China )摘要:PID 控制器是用途最广的控制器,对常规PID 参数整定方法和一些先进整定方法作了较全面的综述,并比较了各种方法的特点。
最后还指出目前PID 参数整定研究的热门方向。
关键词:PID 控制器;参数整定;控制算法中图分类号:TP272 文献标识码:AAbstract :PID controllers are the most widely used controllers.S ome conventional and advanced tuning methods for PID pa 2rameters tuning are comprehensively summarized in the paper.The characters of each method are compared.The key issues in the study of PID parameter tuning are presented.K ey w ords :PID controllers ;parameter tuning ;control algo 2rithmPID 控制器自产生以来一直是工业生产过程中应用最广的控制器,目前大多数工业控制器都是PID 控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID 控制器还是以其结构简单、易实现、鲁棒性好等优点,处于主导地位。
PID参数整定的一种混合优化算法
付勇智;陈伟
【期刊名称】《机械设计与制造》
【年(卷),期】2007(000)011
【摘要】PID控制器是工业界应用最广泛的控制策略,参数整定是PID控制器设计的核心内容.提出一种基于遗传算法和数值优化算法的混合优化方法,采用由粗到精的搜索过程,先利用遗传算法进行全局粗略搜索,再利用数值优化算法得到精确的参数.仿真试验结果证明提出的混合优化算法是进行PID参数整定的一种有效方法.【总页数】2页(P50-51)
【作者】付勇智;陈伟
【作者单位】湖北汽车工业学院,十堰,442002;华中科技大学,武汉,430074
【正文语种】中文
【中图分类】TP13;O224
【相关文献】
1.一种PID参数整定的粒子群优化算法 [J], 张兴华;李纬;周刘喜
2.一种基于自适应策略的混合鲸鱼优化算法 [J], 王廷元;何先波;贺春林
3.一种混合策略改进的灰狼优化算法 [J], 倪静;秦斌;曾凡龙
4.YYPO-SA:一种新的基于YYPO和SA的混合单目标随机优化算法 [J], 李大海;刘庆腾;艾志刚
5.一种基于粒子群优化算法和差分进化算法的新型混合全局优化算法 [J], 栾丽君;谭立静;牛奔
因版权原因,仅展示原文概要,查看原文内容请购买。
第38卷第3期2021年3月吉林化工学院学报JOURNAL OF JILIN INSTITUTE OF CHEMICAL TECHNOLOGYVol.38 No.3Mar. 2021文章编号:1007-2853 (2021) 03-0057-04惩罚函数结合遗传算法的PID 参数优化高兴泉,黄东冬,丁三毛(吉林化工学院信息与控制工程学院,吉林吉林132022)摘要:针对传统优化算法对PID 参数优化时,由于目标函数选择不当岀现的超调量过大,从而引起系统的反应速度变慢和稳定性变差的问题,提岀以传统遗传算法为基础,引入惩罚函数的方法,根据系统中 岀现的超调量来构造新的目标函数,实现对PID 的参数优化.实验表明,该方法可以有效减少系统中的超调量,加快优化以及运行速度的同时保证系统的稳定性,实现对PID 参数的优化.关键词:惩罚函数;遗传算法;PID 中图分类号:TP 273 文献标志码:ADOI :10.16039/22-1249.2021.03.012现如今,多数PID 参数进行优化的相关优化 算法在求解最优化问题时,都是依靠适应度函数 值的大小来区分优化结果的好坏,可以看出目标 函数的选取在优化算法中起着决定性的作用.一 些常见的目标函数如绝对误差积分[1]、误差平方 积分[2]、时间乘误差平方积分[3]、时间乘绝对误 差积分[4]都被引用到优化算法的过程中,这些目 标函数能够迅速减小起始误差,并且在系统中反 应较快,但是系统中因此出现的超调变大将会无法避免,这些适应度函数作用于系统时选择性较 差,最终导致系统的反应速度变慢和稳定性变差 等问题•本文提出将惩罚函数[5]引入到目标函数 中实现对PID 的参数优化的方法,首先以传统遗 传算法[6]为基础,选用时间乘绝对误差积分为目标函数,然后将系统中出现的超调量作为惩罚项 来构建新的目标函数•最后以双容水箱为例的仿 真结果中表明,用惩罚函数构造出的新的目标函 数能大大减小超调量,提高系统的动态响应能力.(1)其中:/是一个比例系数;&是积分系数;心是微 分系数;e(t)是误差信号;吠t)是PID 的控制输出.PID 控制器在实际应用时,最为困难的在于 比例、积分、微分系数的选取问题上•所以一般都会使用优化算法对这3个参数进行优化进而得到 理想的参数来应用于系统•对于传统优化算法都 会使用如下4种目标函数来对参数进行优化.(1) 绝对误差积分J I e( t) I dt;(2) 误差平方积分:Je 2(t)dt;(3) 时间乘误差平方积分Jte 2( t)dt;(4) 时间乘绝对误差积分:JtI e( t) I dt.对于这4种目标函数优化出来的PID 参数效 果并不满意,使得系统中出现震荡和超调的现象 从而导致系统不稳定•这里提出将传统目标函数中结合惩罚函数的思想来解决此类问题•1 PID 控制算法及其参数优化2惩罚函数PID 控制器是根据系统的给定值与输出值之间的偏差作为输入信号,利用此信号来和PID 控 制器中的控制算法相乘产生控制输出,其控制规 律如下:t d [ e( t)]"(t ) =K p e(t ) + K. Ie (t )d t + K d ,0 dt惩罚函数法⑺的优点是能将系统约束融入最优化问题中,其中心思想就是将脱离可行域的 点通过构造惩罚函数的方式来进行约束,然后用 最优化方法解决无约束情况下的相应的问题•然 后考虑非线性约束优化问题[8-9]:minA %),(2)s.t. g :( %) M 0 ,i = 1,…,m.收稿日期:2020-12-31基金项目:吉林省教育厅十三五科学技术项目(JJKH20200252K);吉林市科技创新发展计划项目(20200202003) 作者简介:高兴泉(1976-),男,吉林松原人,吉林化工学院教授,博士,主要从事先进控制、智能制造方面的研究.58吉 林 化 工 学 院 学 报2021 年hj (x )二 0,j = 1, — ,1, (3)其中f( x )为目标函数旳(x )(j = 1, •••,/)是等式 约束条件,g :( x ) ( i = 1,…,m)是不等式约束条件,三者均是在R n 上的连续函数.惩罚函数中心思想就是将问题(2)转化为: min G (x)二f(x) + cP (x),此处的 G(x )就是惩罚函数,c 为惩罚因子,P (x)则为惩罚项.通常当x 在可行域内时,P (x)二0,则G (x)二f(x );当x 不在可行域内的时候,在x 处,cP(x )是很大的正数,他的存在就是迫使脱离点靠近可行域.引理2.1[10] 假设仁g ,h 是R n 上的连续函数,对于每一个惩罚因子c,都会存在一个x c eR n ,使得G ( c) =f(x c ) + cP (x c )成立,满足以下内容:(1) inf{/(x ) :g(x ) W 0,h(x)二 0} Msup c 〉0G( c),其中 G (c)二 inf{/(x) + cP (x ) };(2) 当c > 0时,/(x )关于x 单调不降,G (c)对于c 单调不降,P (x c )对于c 单调不增.为了得到满意的过渡过程动态特性,采用时间乘绝对误差积分为目标函数:/(x)二[tI e (t) \d t , (4)若系统中出现了超调,以原来的目标函数为基础再加入惩罚函数,将系统中出现的超调量作 为惩罚项加入目标函数中形成新的目标函数:G (x )二[t \ e( t) \ dt+c [\ e( t ) \ d t ,00(5)所以对于系统中的目标函数可以总结为:「8I t \ e(t) \ dtj 0G(x)二 \88I t \ e(t) \ dt+c I \ e(t) \ dtJ 0J 0e(t) M 0e(t) < 0(6)将带有惩罚函数的目标函数应用到PID 的参数优化中需要一种优化算法,这里结合传统遗传算法实现PID 的参数优化.3遗传算法解决PID 参数优化问题3.1遗传算法遗传算法是一种可以模拟自然界生物繁衍规则进化发展机制的随机全局搜索和优化学习算法.该算法的工作原理大致为以下3步:第1步,初始群体是在给定区域内的随机方式产生;第2步,通过研究选取的适应度函数来计算各个个体的适应度值,以适应度值的大小来判断所得解或 个体是否为系统最优;第3步,按照遗传算子3大基本步骤进行寻优处理,也就是选择、交叉、变异,从而得到最优良的个体,最终让种群不断地寻优直至达到理想的目标区域内为止.3.2遗传算法求解PID 参数优化问题的步骤遗传算法来优化K p , K i , K d 3个参数,优化得到的参数对系统的控制性能有很大的改善.首先随机产生初始种群,将种群信息给予PID 参数.若系统中出现超调,那么将超调量作为惩罚项构造惩罚函数并且加入目标函数中,从而生成新的目标函数.将新的目标函数融入遗传算法中的性能指标中进行判断,借助遗传算法中的基本法则不 断优化,直到系统达到最大进化代数,输出最优一组参数.惩罚函数结合遗传算法优化PID 参数示意图如图 1 所示.图1遗传算法优化PID 参数系统图K dr 、T 1图1中:r(t)为系统输入信号;y(t)为系统输出信号;e( t )为误差信号;J =I t \ e( t) \ dt ;J 1 =J + c f\ e( t) \ d t ,u (t)为 PID 控制器输出 .3.3实施步骤遗传算法通过以下步骤优化PID 参数:(1) 按经验选取一组K p 、人、K d 参数,根据系 统的实际情况以及要求确定约束条件,K p e [0,8],K i e[0,2],K °丘[0,1].(2) 编码及初始种群生成.采用二进制的方法对系统中的久、仏、心参数进行编码,并且设置种群规模为50,根据之前按经验法所得参数产生初始种群.(3) 系统如果存在超调,则选择加入惩罚函数的目标函数J 1,如果没有超调,则选择目标函数J 作为最优性能指标.(4) 解码,确定适应度函数/ = 1/J,根据适应第3期高兴泉,等:惩罚函数结合遗传算法的PID参数优化59度函数来算个体适应度值的大小来判断并找出最优个体.(5)若符合优化要求(达到设置的最大进化代数),即可输出系统中最优的一组PID参数,算法结束,若不满足要求,按照遗传算法的核心三大步继续寻优以寻得最优一组参数为止.(6)返回步骤(3),若系统流程优化至指定要求(达到设置的最大进化代数),将最优解输出,否则,继续进行优化.遗传算法优化PID参数的流程图如图24仿真实验并分析以双容水箱系统为例.将惩罚函数引入到目标函数中实现对PID参数优化的方法应用到双容水箱系统中.双容水箱模型描述如下:Sh1=Q-S12gh1Sh2=S12gh1-S2(7)其中:h1和h2分别代表上水箱和下水箱的液位;Q 代表流量;其他参数代表的意义及其数值如表1所示.双容水箱系统实际上是以下水箱的液位达到设定值为控制目标.上水箱和下水箱的初始液位均设为0.本次设计实验是对下水箱液位达到的设定值为15cm.表1参数代表意义及数值符号物理量及单位数值S上下水箱横截面积/cm215.5179S1上水箱出水口横截面积/cm20.1781S2下水箱出水口横街面积/cm20.1781g重力加速度/(cm-s-2)981下面采用基本遗传算法、惩罚函数引入到目标函数两种方法对PID参数整定的仿真进行对比实验.遗传算法中的种群大小设置为50,进化代数为100代,交叉率为0.9,变异率为0.01,惩罚函数的惩罚因子设置为100.两种方法优化PID参数结果如表2所示.表2两种方法优化PID参数的结果优化方法K p K i K d迭代次数基本遗传算法 2.07070.06510.617162惩罚结合遗传算法0.87130.04220.762712图3所示为两种优化PID参数方法对最优适应度值的对比图.从图3就可以看出,通过两种优化方法最后得到的最优指标几乎是一致的,但是基本的遗传算法在58代的时候接近最优,62代才能达到最优,而惩罚函数引入到目标函数的方法在5代的时候接近最优,到12代的时候就达到了最优,表明了惩罚函数引入到目标函数的方法能够大大提高系统的动态响应能力.图4为总仿真时间为200s下的两种优化后的下水箱液位曲线和PID输出控制量曲线.从图4可以看出,基本的遗传算法虽然能使60吉 林 化 工 学 院 学 报2021 年系统达到稳态,但是系统中还是存在着较大的超 调.而用本文所设计的新目标函数的结果来看,系 统中几乎没有存在超调,有效地控制了系统中的 超调量,并且能够有效地改善系统控制性能的稳t/ s3020 f \ —iSsSIt 算法40 80 120 160 200t/ s图4液位曲线及控制量曲线5 结 论针对传统优化算法对PID 参数优化时,由于 目标函数选择不当出现的超调量过大,从而引起 系统的反应速度变慢和稳定性变差的问题,提出了惩罚函数引入到目标函数中实现对PID 的参数优化的方法.在系统的运行过程中,一旦产生超 调,则惩罚函数将会用超调量作为惩罚项加入目标函数中,进而形成新的目标函数,遗传算法将会以带有罚函数的目标函数进行优化.本文中,以双 容水箱系统仿真为例,实践仿真结果表明,惩罚函数引入到目标函数中实现对PID 的参数优化的方法能有效地减小了超调量,加快优化以及运行速度的同时保证了系统的稳定性.参考文献:[1]康有,夏传清,马顺刚•洪水频率分析中目标函数的统计试验研究[J/OL ].水力发电:1-9[ 2019-08-23 ]. http ://kns. cnki. net/kcms/detail/11. 1845. TV.20190726.1700.002.html.[2] 张娟,孙彦超,高杨,等.基于花授粉算法的无刷直流电动机速度控制研究[J].微特电机,2020, 48(3) :58-60,64.[3] 汪浩,李晓明,严伟,等.具有最小时间加权平方误差积分的主动队列管理算法ISTE-PI[J].计算机学 报,2012,35(5) :951-963.[4] 周志刚,马永光,董子健,等.基于人群搜索算法的自抗扰控制器参数优化[J].热力发电,2018, 47(9) :1-8.[5] 闫帅印,薄瑞峰,李瑞琴,等.动态惩罚函数非线性规划遗传算法及在汽车变速器中的应用[J].机械 传动,2015,39(2):146-149.[6] 周勇,邓仕英.基于改进遗传算法的PID 参数优化在闪蒸罐压力控制中的应用[J].现代制造工程, 2019(2) :134-139.[7] 皇甫尚乾.改进罚函数分级遗传算法及其在结构优化设计中的应用[D].广州:广州大学,2018.[8 ] MAHSA GHOVVATI , GHOLAM KHAYATI ,HOSSEINATTAR , et al.Kinetic parameters estimation of protease production using penalty function method with hybrid genetic algorithm and particle swarm optimization [ J]. Biotechnology & ; Biotechnological Equipment , 2016,30(2) :404-410.[9] 黄静,刘玉惠•一种求解约束优化问题的遗传算法[J].青海师范大学学报(自然科学版),2020,36 ( 1): 11-15.[10] 徐健锐,朱会娟.基于自适应惩罚函数的云工作流调度协同进化遗传算法[J].计算机科学,2018, 45(8) :105-112.PID Parameter Optimization based on PenaltyFunction and Genetic AlgorithmGAO Xingquan , HUANG Dongdong , DING Sanmao( School of Information and Control Engineering,Jilin Institute of Chemical Technology,Jilin 132022,China)Abstract : Aiming at the problem that the overshoot of the traditional optimization algorithm in the optimizationof PID parameters is too large due to the improper selection of objective function , which results in the slow reaction speed and poor stability of the system, a new method based on the traditional genetic algorithm and introducing penalty function is proposed to construct a new one according to the overshoot in the system.The objective function is used to optimize the parameters of PID . Experiments show that this method can effectively reduce the overshoot in the system,speed up the optimization and operation speed while ensuring the stability of the system , and realize the optimization of PID parameters.Key words : penalty function;geneticalgorithm;PID。
2011年5月第18卷第3期控制工程ControlEngineeringofChinaMay2011V01.18,No.3文章编号:1671—7848(2011)03—0352—04基于HS-PSO算法的PID控制器参数自整定曹方。
,王伟。
,王介生2,刘玉超3,曹晟熙4(1.大连理工大学电子与信息工程学院,辽宁大连1160233.元宝山发电有限责任公司内蒙古赤峰024070:42.辽宁科技大学电子信息与工程学院,辽宁鞍山l14044:沈阳万宸建筑规划没汁有限公司辽宁沈阳110000)摘要:针对粒子群算法(PSO)算法局部搜索能力差的问题,提出一种对PID控制器参数进行自整定的基于和声搜索(Hs)的改进粒子群优化算法(HS—PSO)。
通过引入种群进程因子对惯性权重进行自适应调节以提高PSO算法的收敛速度。
另外在PSO进化过程中每代产生的最优个体以新陈代谢方式进入和声记忆库中并进行和声搜索,以克服粒子群优化算法局部搜索能力差的缺陷一针对典型对象进行PID控制器参数自整定,仿真和工程应用结果表明所提HS—PSO算法较他它智能优化算法具有更好的全局优化能力.关键词:粒子群优化算法;和声搜索;PID控制;自整定中图分类号:TP273文献标识码:ASelf・-TuningofPIDControllerParametersBasedonHS・-PSOAlgorithmCAOFan91,WANGWetl,WANGJie—shen92,UU地一cha03,ChaoSheng—xi4(1.DalianUniversityot‘Fechnology,Dalian116023,China;2LiaoningUniversityofScience&Technology,Anshan114044,China;3.YuanbaoshanPowerGenerationCoLtd,Chifeng024070,China;4.Shenyangwallthenarehiteechture&plandesignCohd,Shengyang110000,China)Abstract:Aimingattheproblemthattheparticleswarmoptimization(PSO)haslowerlocalsearchcapability,animprovedPSObasedonharmonysearch(HS—PSO)isproposedtotunethePIDcontrollerparameters.Populationschedulefactorisadoptedtoself-tunetheinertiaweightinordertoenhancetheconvergencespeedofPSOalgorithm.ThehybridoptimizationalgorithmstoresthebestindividualproducedineachgenerationofPSOew)lutionprocessintotheharmonymemorywiththemetabolicmannerandcarriesthroughthehar—monysearchinordertoovercometheshortcomingoflowerlocalsearch.Itisdemonstratedbynumericalsimulationsontheclassicalob—jectstotunetheparametersofthePIDcontrollerthattheprocessedHS—PSOalgorithmhasthemoreexcellentglobaloptimizationper—formancethanotherintelligentoptimizationalgorithms.Keywords:particleswarnloptimization;harmonysearch;PIDcontroller;self-tuning1引言PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高等优点被广泛应用于工业过程控制领域。
解决单目标和多目标优化问题的进化算法一、本文概述随着科技的发展和现实问题的复杂性增加,优化问题在我们的日常生活和工程实践中变得越来越重要。
特别是单目标和多目标优化问题,这两类问题在诸如工程设计、经济决策、物流规划等众多领域都有广泛的应用。
进化算法作为一种模拟自然选择和遗传机制的优化方法,在解决这类问题上展现出了强大的潜力和效率。
本文旨在探讨进化算法在解决单目标和多目标优化问题中的应用,分析其原理、特点、优势以及面临的挑战,并展望未来的发展方向。
我们将介绍进化算法的基本原理和主要特点,包括其如何模拟自然选择和遗传机制,以及其在优化问题中的通用性和灵活性。
然后,我们将重点讨论进化算法在解决单目标和多目标优化问题上的具体应用,包括算法设计、性能评估以及实际应用案例。
我们还将分析进化算法在解决这些问题时所面临的挑战,如计算复杂度、收敛速度、全局最优解的保证等,并探讨可能的解决策略。
我们将展望进化算法在解决单目标和多目标优化问题上的未来发展趋势,包括与其他优化方法的结合、自适应和动态调整策略的发展、以及在新兴领域如深度学习、大数据处理中的应用等。
我们期望通过本文的探讨,能够为读者提供一个全面而深入的理解,以推动进化算法在优化问题中的更广泛应用和发展。
二、单目标优化问题的进化算法单目标优化问题(Single-Objective Optimization Problem, SOOP)是优化领域中最基本也是最常见的一类问题。
在SOOP中,我们的目标是在给定的搜索空间中找到一个最优解,使得某个预定的目标函数达到最优值。
这个目标函数通常是一个实数函数,可以是线性的,也可以是非线性的,甚至可能是离散的或连续的。
进化算法(Evolutionary Algorithms, EAs)是一类基于自然进化原理的优化算法,特别适合于解决单目标优化问题。
EAs通过模拟自然进化过程中的选择、交叉、变异等机制,在搜索空间中逐步搜索并逼近最优解。
南京理工大学学报Journal of Nanjing Un—
ewity of Science and
Technology
VoU45 NoC
Aug2021第
45卷第
4期
202%年8月
基于神经网络优化算法的分数阶PI!
D
"控制
谢玲玲,秦龙
(广西大学电气工程学院,广西南宁
530004)
摘要:针对传统的PID控制器控制效果欠佳以及分数阶PLD控制器参数复杂难以整定的问
题,设计了一种基于误差反向传播(Back propagation, BP )神
经网络算法的分数阶PLD控
制
器。首先,将分数阶PLD"
控制器数字化
,
然后通过BP
神经网络算法调节突触权值,经调整后
的输出量作为分数阶PLD控
制器的参数值,最后分别采用分数阶和整数阶作为被控对象进行
实验仿真,仿真结果证明了神经网络分数阶PLD控制器比传统PID
控制器的具有超调量小
、
上升时间快、稳定性好的优
3
。
关键词:分数阶PLD;自适应;
误差反向传播神经网络;参数整定
中图分类号:TP273 文章编号
:
%005-9830(
202%)
04-0515-06
DOI: 10.1417^^/.cnki.C2-%397n.2021.45.04.017
Fractional order PI!
D
control
based
on
neerai network
optimization algorithm
Xic Lingling,Qin Long(School of
EWctUcal
Engineecng
,Guangoi Un—wsity,Nanning 530004,China)
Abstract: To solve the problems of poor control eWect of tradiUonal PID controller and the complex
paameters of —actional order PI%D conWoller,a —actional order PI%D" conWoller based on back
第一章 进化优化算法概述1.1 进化算法的一般框架自1960年以来,进化算法已经发展出相当多的种类,但一般认为进化算法有5个基本组成部分[3]:1.问题解的遗传表示。
2.种群的初始化方法。
3.根据个体适应度对其进行优劣判定的评价函数。
4.产生新的种群的进化算子5.算法的参数取值1.1.1进化优化算法解决对象的描述进化算法主要是求解优化问题,其数学模型如下:Maximizey =f (x )(1.1)Subject to g(x )=()(1x g ,)(2x g ,…,)(x g m )≤0 (1.2)其中 x =(1x ,2x ,…,n x )∈X ,x 是决策向量,X 是决策向量形成的决策空间;y 是决策目标。
这是个最大化问题,对于最小化问题可以令y '=C -f (x )转化为最大化问题,因此,它们在本质上是一致的。
根据优化函数f (x )是否连续可以将最优化问题分为二大类:连续函数的最优化与离散函数的最优化。
后者也可以称为组合优化问题。
根据是否包含约束条件(1.2)可分为约束优化问题和无约束优化问题。
此外,若y 是一个决策向量,则是一个多目标的优化问题,我们将在第二章进一步讨论。
1.1.2进化优化算法结构进化算法的一般结构如图 1.1所示,进化算法维持由一群个体组成的种群P (t )(t 为进化代数)。
每个个体代表问题的一个潜在解。
每个个体通过目标函数评价得到适应度并根据优胜劣汰的原则进行选择。
被选择的个体经历遗传操作产生新的个体,主要有两种遗传操作:杂交是将多个个体的有关部分组合起来形成新的个体,变异是将一个个体改变而获得新的个体。
新产生的个体(子代)继续被评价优劣。
从父代种群和子代种群中选择比较优秀的个体形成新的种群。
在若干代后,算法收敛到一个最优个体,该个体很有可能代表问题的最优或次优解。
图1.1 进化算法流程图1.1.3进化算法几个环节的解释遗传编码:如何将问题的解编码成染色体是进化算法使用中的关键问题,目前的编码方式主要有二进制编码[4]、Gray编码、实数编码、字符编码等,对于更复杂的问题,用合适自然的数据结构来表示染色体的等位基因,可以有效抓住问题的本质,但总的来说,完整的遗传编码理论尚未建立,部分文献[5~7]的讨论都有都有一定的局限性。
智能PID 控制综述摘要 传统的PID 控制应用于复杂的实际系统时存在一定的局限性,因而智能PID 控制器是当今研究的热点。
融合了先进智能控制思想和传统PID 构成的智能PID 控制器则具有更加良好的特性。
文中对几种常见的智能PID 控制器,包括模糊PID 、神经网络PID 、专家PID 控制器及基于遗传算法的PID 控制器等进行了综述。
关键词 PID 控制器 智能控制 智能PID一、引言PID 控制[1-10,51-52]作为经典控制算法中的典型代表,是一种传统的控制方式。
1922年 N.Minorsky 提出PID 控制方法,1942年美国Taylor 仪器公司的 J.g.ziegler 和 N.B.Nichols 提出PID 参数[1]的最佳调整法至今,其在工业控制中的应用已十分广泛[2-4]。
PID 控制具有结构简单、参数物理意义明确和鲁棒性强等特点。
PID 控制器[5-9]对系统给定值()r t 同系统输出值()y t 的偏差()e t 分别进行比例、积分、微分运算,并由此得到其输出值()u t ,计算公式为:0()()()()()t P L D de t u t K e t K e t d t K dt =++⎰式中P K 为比例系数;L K 为积分系数;D K 为微分系数。
P K 、L K 、D K 可对系统的稳定性、稳态精度、响应速度和超调量等性能产生影响,它们的作用分别为:(1)比例系数P K 可以加快系统的响应速度,提高系统的调节精度。
系统的响应速度和调节精度同P K 呈正相关,但P K 过大则会产生超调,使系统不稳定,P K 过小则会使响应速度变慢,使系统静、动态特性变坏。
(2)积分作用系数L K 可以消除系统的稳态误差。
L K 越大,系统静差就会越快消除。
但L K 过大会在响应过程产生较大超调,产生积分饱和现象。
L K 过小则会使系统稳态误差不易消除,影响调节精度。
(3)微分作用系数D K 可以改善系统的动态性能。
第26卷第1期 2005年1月 华侨大学学报0自然科学版)
journal of Huaqiao I ll、’crsiD _\ lt Lit L ̄.I Science)
文章编号 1000—5013(2005)01—0085—04
VoL 26 NO.i Jan.2005
进化算法的PID参数最优设计 周凯汀 郑力新 (毕侨大学信息科学与工程学院.福建泉州362021)
摘要提出用进化算法最优设计PID参数的方法,获得最优设计结果.分析控制系统常用性能指标作为进化 评价函数的不足.构建控制系统新的评价函数.为使优化筷型简化.设计参数采用实数编码及归一化处理.进 化算法使用新型的,以基因为单位进化的遗传算法.数值实验表明.设计结果得到显著改善. 关键词PID.遗传算法,性能指标,优化设计 中图分类号TP 273 .1:TP 18 文献标识码 A
PID控制器原理简单,形式固定,鲁棒性好.几十年来始终占据工业控制器的主流,使用率达8O 以上.因此,研究PID参数的整定技术具有重要意义.ZN法是整定PID控制器的经典方法,它能够使系 统形成闭环投入工作,但存在超调量大的严重缺陷,系统的工作状态尚待优化.近年来,模拟生物进化过 程的遗传算法(GA)作为求解优化问题的有效手段.开始被引入控制系统的设计中.GA采用非数值计 算方法和随机进化策略,无需梯度信息,能有效地攻克十分困难的优化问题.它处理问题具有灵活性、适 应性、鲁棒性和全局性,不仅能提高设计品质.而且降低了设计的难度,本文提出了一种用遗传算法优化 设计PID参数的方法.与同类研究相比n ?,具有如下3个特点.(1)为了得到最优的设计结果,分析了 控制系统常用性能指标的缺陷,并构建丁一个更有效的新指标.(2)采用实数编码,并利用ZN法的合 理内核对寻优参数进行了归一化处理,使优化模型碍以简化,从而增强程序的鲁棒性.(3)使用新型的 以基因为单位进化的遗传算法,提高了设计效率.
1 控制系统的性能指标 在控制系统的进化设计中,性能指标作为遗传算法的评价函数指导着种群的进化,它的真实、准确、 灵敏程度对最终解的影响不容忽视.从已有研究报道可以看出,性能指标局限于常用的IAE,ISE, ITAE种ISTE等上,所得到的解有一定的改善,『旦还不能说很理想.IAE,ISE,ITAE和ISTE等常用指 标的优点是,仅含有误差与时间两个变量,容易从系统输出响应中直接获得;而缺点是指标算式中的误 差始终以绝对值形式出现,无法区分正负误差.此外,没有直接反映出超调量和过渡时间这两项衡量控 制系统优劣的重要内容. 基于上述分析,本文提出了一个衡量控制系统性能的新指标,即 F一 厂 _I(1一 ) , 其中f。一1.0一expF一(2d ) ],厂2—1.0一exp[-~(2t /q) ],J8为加权系数.d,t 为系统的超调量与 过渡时间, ,£ 为与ZN法参数所对应的超调量与过渡时间.以厂1函数为例,当 为零,即系统的超调 量为零时,厂。的值为零,取最小值;随着比值 / 的增大,函数厂。陡然增大,即系统超调量 的微小变 化将引起厂。的急剧变化,使得该厂。指标对系统超凋量的变化十分敏感.厂。随 / 的变化关系,如图i 所示.厂2与£。/£ 具有完全类似的关系.
收稿日期 2004~02—18 作者简介周凯汀(1968一).女.副教授.主要从事智能仪器与控制的研究.E—mail:zlxzktl@people.com.cp 基金项目 华侨大学科研基金资助项目(02HJR05)
维普资讯 http://www.cqvip.com 86 华侨大学学报(自然科学版) 2005正 图1 fl与 / 比值的关系 新指标F将厂 与 用加权系数卢综合在一起,可以根据对超调量或者过渡时间的偏好设置加权
系数,使用起来十分灵活.
1一 一 l 图2典型PID反馈控制系统 是dIIl k 一∈Eo,1],ki 一∈Eo,1],kd :∈Eo,1]为新的设计参数.文中,取kp =1.6・ ,kp 一0.3。 是:,另两个参数是i,是d的上下限则设定为与此相似.即是~ 一1.6・是i。,是.皿|D一0.3・忌 ,是dma 一1.6‘是 , 是 i 一0.3・是 .在保证系统稳定的前提下,规定不同的上、下限系数可重新设定搜索空间,但k ,ki ,kdc 的取值区间则始终不变,恒为[O,1].如此处理简化了寻优参数搜索空间的规定,程序也更为简单可靠. 综上所述,系统优化模型可归纳为minJ(J—ISE,IAE,ITAE,ISTE,F);基于O≤是 ≤1,O≤ki ≤1,0 ≤是fc≤1.
3 遗传算法 遗传算法有两个重要控制参数——交叉率P 和变异率P 对算法的效率有较大影响,本文研究使 用了一种新型自适应遗传算法.该算法摒弃了以往自适应遗传算法∞ 以染色体为单位进化的观念而 改为以基因为单位进化,使遗传算法的效率得到进一步提高.下述P 和P 的计算方法. 令种群的染色体个数为M,每个染色体所含的基因种数为N,则种群全体可以用一矩阵表示为
X(M,N)一
维普资讯 http://www.cqvip.com 第1期 周凯汀等:进化算法的PID参数最优设计 87 由欧式距离衡量第 种基因之间的差异,即 M.¨ 2∑(工 一zJ,I)。
一砑 兰 _二二 ’
而该基因对应的交叉率和变异率分别为 P ( )一min{ d ,0.625},P ( )= (1一P ( )), (2) 其中z一 ,z i 为第 种基因的最大值与最小值, , 为设定常数.式(2)合理地兼顾了基因间差异对 和的调整作用,以及P 和P 的经验取值范围.例如,当 取5, 取0.5时,便将P 和P 限制于区 间[-o,0.625]和[-o.187 5,0.53内.本文的优化设计有5个步骤过程.(1)全局变量设定.给出种群数M, 系数 , ,最大世代数MAXGEN的大小.(2)种群的产生及初始化.设世代计数器gen一1.以归一化 所得的参数k ,k¨志 为基因组成染色体x,即 x—Ek ,k kdc]. 种群由M个染色体构成,为x(M,3)矩阵.初始染色体中的基因在Eo,1]范围内随机产生.(3)基因交 叉率与变异率计算.在X(M,3)矩阵中逐列选中基因,按式(1)计算对应平均欧氏距离,再按式(2)求出 对应的交叉率和变异率.(4)进化操作.先复制种群.在复制的种群中,按各列基因对应的交叉率和变异 率逐列进行基因的交叉(采用算术交叉)。 和变异(在[O,1]区间随机地产生一个数来取代原有值),形成 个子代染色体.然后,进行同一世代染色体的评价与选择.将染色体逆映射于PID参数空间获得对应 的PID参数,然后将PID参数代人仿真程序计算阶跃响应及评价函数 .选出其中 值最小的M个染 色体构成新种群,并显示本世代的最佳染色体的评价值.(5)过程结束判定.如果gen ̄MAXGEN,回 到步骤(3)重复进行;如果gen≥MAXGEN,则存贮最佳染色体.绘制最佳染色体的输出响应曲线,结束 求解过程.
4数值实验例 文献[8]提供了采用不同方法来设计PID参数的实例.其控制对象的模型为 G㈦一 . 按ZN法得是 一2.813,ki 一1.719,k2—1.151.其对应系统性能指标为d 一43 , 一5.1 S.分别以 ISE,IAE,ITAE,ISTE,F为评价函数,取M一20,MAXGEN一40, 一5, 一0.5,采用Matlab语言在 计算机上完成本方法设计,所得结果如表1所示.其中G ,Pu为系统的幅值裕度与相位裕度.暂且 抛开超调量和过渡时间相互关联的事实,表1的设计结果显示,由其他指标所得的最佳超调量为 表1 采用不同性能指标的进化结果及相应系统参数(误差带取2 ) 评价函数 F ITAE ISTE IAE ISE 2.0028 2.2566 2.3132 2.3355 2.4091 0.9819 l_O99O 1.1555 1.1278 1.3365
6.73 (ITAE指标)、最短过渡时间为3.31 s(ISTE指标),而F指标的超调量d 一0.35 仅为上述最 佳值的5.2 ,过渡时间t 一1.76 S仅为上述最短过渡时间的53.2 ,频域指标G ,P 也是最好的.由 此可见,F指标带来了显著改善的设计结果.各指标.厂值的归一化平均变化范围,如图3所示.由图看 出,F指标的评价值(K)变化范围最大,说明它能灵敏地反映出系统性能的微小改变.由此看来,F指标 能够灵敏地反映出系统的性能,而且能准确地指导着遗传算法的进化方向,与ISE,IAE,ITAE和ISTE 等常用指标相比,具有更好品质.图4为各指标设计结果对应的系统单位阶跃响应曲线,其纵轴为归一 化输出值y(即输出与输入之比值),其量纲根据实际对象确定.采用本文的遗传算法,最优结果出现的 平均世代数为14.5,采用文献<93的简单遗传算法和文献<33的以染色体为单位进化的自适应遗传算 法,最优结果出现的平均世代数分别为28.7和20.1,显然,本文的遗传算法具有显著提高的效率.
维普资讯 http://www.cqvip.com 88 华侨大学学报(自然科学版) 2005正 O O
5 结束语 图3不同指标对应的进化过程 () 2 4 ,,s 6 8 图4不同指标对应的阶跃响应
用遗传算法优化设计PID参数是为了获得一个最优控制,除了前文所述的几个特色之外,本文的 突出优势在于获得了显著改善的设计结果,更好地实现了设计的初衷.这一改善是由新建立的控制系统 评价函数带来的.本文中,F是以ZN法对应的超调量与过渡时间为参照,实际上,作为参照的超调量与 过渡时间也可以做其它合理的选择,限于篇幅,这里不再赘述.总之,本文的基本思想与方法具有普遍 性,可以在电气、电子等较复杂系统的参数优化问题中得到广泛的应用.
1 2
3 4
8 9
参 考 文 献 Porter B.Jones A H.Genetic tuning of digital PID controllers[J].Electron.Lett..1992.28:843~844 Wang P.Kwok D B.Optimal design of PID process controllers based on genetic algorithms[J].Control Engng.Prac— rice.1994.2(4):641~648 吴斌.吴 坚.快速遗传算法研究[J].电子科技大学学报.1999.28(1):49~53 Fushuan Wen.New approach tO alarm processing in power systems based on the set covering theory and a refined ge—