陀螺仪与加速度传感器介绍
- 格式:ppt
- 大小:5.59 MB
- 文档页数:21
举例说明mems的应用及例中mems器件的原理MEMS(微机电系统)是一种将微型机械结构与电子技术相结合的技术,它可以将传感器、执行器和其他微型器件集成在一起,以实现各种应用。
下面将以几个常见的MEMS应用为例,详细介绍其原理。
1.加速度计加速度计是一种测量物体加速度的传感器,广泛应用于智能手机、游戏手柄、汽车安全气囊等设备中。
MEMS加速度计通常由一个微型质量块和一对微型弹簧组成。
当被测试物体加速度改变时,质量块会移动,并产生微小的尺寸变化。
这种变化可以通过电容或压阻传感器来检测,从而得到加速度的值。
2.陀螺仪陀螺仪是用于测量物体角速度的传感器,常见于飞行器、导航设备等应用中。
MEMS陀螺仪通常由两个共面的振动器组成。
当物体发生旋转时,由于科里奥利力的作用,振动器之间会产生微小的力。
这种力会导致振动器的位移,通过检测振动器的位移变化,可以得到物体的角速度。
3.压力传感器压力传感器用于测量气体或液体的压力,广泛应用于医疗设备、工业自动化等领域。
MEMS压力传感器通常由一个微型薄膜和一个微型腔室组成。
当受到外部压力时,微型薄膜会发生微小的弯曲变形。
通过检测薄膜的变形,可以得到压力的值。
4.振动传感器振动传感器用于测量物体的振动或震动,常见于汽车、建筑结构监测等领域。
MEMS振动传感器通常由一个微型质量块和一个微型弹簧组成,类似于加速度计的结构。
当物体振动时,质量块会受到振动力的作用,从而产生微小的尺寸变化。
这种变化可以通过电容或压阻传感器来检测,从而得到振动的值。
总结起来,MEMS器件的原理都是基于微小的物理变化或力的作用。
通过将微型机械结构和电子技术相结合,可以实现对这种变化或力的检测和测量,从而得到各种物理量的值。
这种集成化的设计使得MEMS器件具有体积小、功耗低、响应速度快、成本低等优点,因此在越来越多的应用中得到了广泛的应用。
手机能自动记录步数的原理手机能自动记录步数的原理主要依赖于内置的传感器技术,其中最主要的是加速度传感器和陀螺仪。
这些传感器可以检测手机在空间中的运动状态,并进一步分析出步行的步数。
首先,手机通过加速度传感器可以测量手机在三个空间维度上的加速度变化,即X、Y和Z轴。
每当我们迈开一步时,脚部的摆动将引发手机在垂直轴上产生加速度变化。
当加速度超过预设阈值时,手机会判断这一动作为一步,并记录下来。
通过连续检测和分析加速度变化,手机可以准确计算出步行者的步数。
另外,手机还可以利用陀螺仪传感器进行步数计算。
陀螺仪传感器可以测量手机绕X、Y和Z轴的旋转速度。
当人们行走时,上半身会伴随着左右摆动,这种摆动会导致手机产生旋转速度变化。
通过分析陀螺仪的数据,手机可以检测到步行的摆动频率和幅度,从而精确计算出步数。
除了加速度传感器和陀螺仪传感器,手机还可能利用其他传感器进行步数计算,比如气压计或计步器传感器等。
这些传感器可以提供额外的数据支持,增强步数计算的准确性。
在实际使用中,手机会持续监测这些传感器的数据,并通过内置的算法对数据进行处理和分析。
这些算法会基于大量的实验数据和机器学习技术进行优化,以提高步数计算的准确性和鲁棒性。
当然,手机记录的步数也不是绝对准确的。
由于姿态、计步算法、设备性能等因素的不同,不同手机的步数计算可能存在一定程度的误差。
此外,某些特殊情况下,比如长时间地摇晃手机或使用其他装置模拟运动,也可能使步数计算产生误差。
总的来说,手机能自动记录步数的原理是利用内置的传感器技术,如加速度传感器和陀螺仪传感器,检测和分析手机的运动状态,通过算法计算出步行的步数。
这种技术为人们提供了方便快捷的运动记录工具,帮助他们更好地了解自身的运动情况和健康状况。
然而,为了获得更准确的步数统计,用户仍然需要结合实际情况进行综合判断。
加速度计、角度传感器知识整理与解析1、传感器基础知识 (2)2、比力 (2)3、加速度传感器测量倾角原理 (3)4、Question and answer (3)5、电子罗盘 (3)7、陀螺仪和加速度计的区别与联系 (4)8、常用芯片介绍 (4)交流QQ:10021007601、传感器基础知识陀螺和加速度计是惯性器件,是用来测量相对惯性空间的角速度(或对于积分类型的陀螺来说是角增量)和加速度。
在三维空间中,描述一个刚体运动要六轴,三轴加速度,三轴角速度。
加速度传感器:测量加速度的值,是指直线运动,一般以重力加速度g为单位。
角度传感器:测量角度的传感器,范围比较广泛各种角度与倾角传感器有些不一样。
角度传感器可以是垂直的,各种安装方式都行,是指相对角度。
多数的角度传感器是以加速计为基础,通过重力加速度分量估算角度,通常也会要求在静态下测量。
倾角传感器:倾角传感器其实是个绝对角度,原型是加速度传感器,是指被测物体与地球引力(垂直地球)的夹角。
所以它应该是个绝对值。
加速度是测量轴向的力,由F=ma,m已知,就可以知道力(加速度)的大小,所以惯导系统的里都是讲“比力”,因为力是比较出来的。
2、比力比力:单位质量上作用的非引力外力。
通常我们说“用加速度计测量载体的运动加速度”,实际上这个说法并不确切,因为加速度计测量的不是载体的运动加速度,而是载体相对惯性空间的绝对加速度和引力加速度之差,称作“比力”---艾弗里尔B,查特菲尔德著.高精度惯性导航基础.北京:国防工业出版社,2002.在一般线加速度计中测量的是比力(a+g)不能分辨出重力加速度g和运动加速度a。
一个加速度计只能测量一个方向的比力,测量矢量必须使用三个加速度计;测量值与安装方向、姿态有关,且受安装精度影响。
三个加速度计垂直安装可测量比力矢量,进而得到运动加速度。
3、加速度传感器测量倾角原理三轴加速度传感器以重力为输入矢量来决定物体在空间的姿态,把加速度传感器固定在物体的水平面上,当物体姿态改变时,通过测量由于重力引起的加速度,你可以计算出设备相对于水平面的倾斜角度。
MPU6050原始数据分析MPU6050是一款六轴陀螺仪和加速度计组合传感器,它可以提供三个轴向的陀螺仪数据和加速度计数据。
这些原始数据可以用于各种应用,如姿态控制、运动追踪、手势识别等。
在本文中,我们将对MPU6050的原始数据进行分析。
首先我们需要明确MPU6050的数据格式。
陀螺仪数据和加速度计数据分别以三个轴的形式提供,每个轴的数据以16位的补码形式表示。
陀螺仪数据的单位是°/s,加速度计数据的单位是g。
在进行实际数据分析之前,我们需要对MPU6050进行初始化。
初始化过程中我们需要设置陀螺仪和加速度计的量程范围(即测量范围)。
量程范围是指传感器可以测量的最大值和最小值,通常有多种可选范围。
选择适合实际应用需求的量程范围可以提高数据精度。
接下来,我们可以开始对MPU6050的原始数据进行分析了。
首先,我们可以通过读取MPU6050的寄存器来获取原始数据。
例如,通过读取寄存器0x3B和0x43,可以获取加速度计和陀螺仪的原始数据。
读取到的原始数据可以通过一些计算公式转换为实际的物理量。
例如,陀螺仪的原始数据可以通过下述公式转换为角速度(单位:°/s):其中,raw_x 是陀螺仪对应轴的原始数据,sensitivity 是陀螺仪的灵敏度,取决于量程范围。
同样地,加速度计的原始数据可以通过下述公式转换为加速度(单位:g):其中,raw_x 是加速度计对应轴的原始数据,sensitivity 是加速度计的灵敏度,取决于量程范围。
通过将原始数据转换为实际的物理量,我们可以更方便地进行后续的数据分析。
例如,我们可以计算加速度计的模长来判断物体的静止状态或运动状态。
加速度计的模长可以通过下述公式计算:accel_magnitude = sqrt(accel_x^2 + accel_y^2 + accel_z^2)其中,accel_x、accel_y 和 accel_z 分别是三个轴向的加速度计数据。
Gyro Acc计算欧拉角单位1. 概述在飞行器、无人机、航天器等领域,欧拉角是描述飞行器姿态的重要参数之一。
欧拉角包括俯仰角、横滚角和偏航角,用于描述飞行器在空间中的姿态变化。
而在实际应用中,常常需要利用陀螺仪和加速度计等传感器来计算欧拉角。
本文将重点介绍如何利用陀螺仪(Gyro)和加速度计(Acc)计算欧拉角,并探讨计算过程中的单位问题。
2. 陀螺仪和加速度计的原理陀螺仪是一种测量角速度的传感器,常用于确定飞行器的姿态变化。
加速度计则用于测量物体的加速度,可用于确定物体的姿态。
在飞行器中,通常会配备三轴陀螺仪和三轴加速度计,用于测量飞行器在空间中的姿态变化。
3. 欧拉角的计算在利用陀螺仪和加速度计计算欧拉角时,常使用“互补滤波”等算法,通过融合两种传感器的数据来获得更加稳定和准确的姿态角度。
具体的计算过程涉及到角速度的积分、加速度的测量等多个步骤,需要综合考虑各种误差对计算结果的影响。
4. 单位的转换在欧拉角的计算过程中,常涉及到不同传感器的输出单位。
陀螺仪通常输出的是角速度(rad/s),而加速度计输出的是加速度(m/s^2),在计算过程中需要将其转换为统一的单位,以确保计算的准确性。
4.1 角速度单位的转换陀螺仪通常输出的是角速度,常见的单位有弧度每秒(rad/s)和度每秒(°/s)。
在进行欧拉角计算时,需要将角速度统一转换为弧度每秒的单位,以便与加速度计的输出单位保持一致。
4.2 加速度单位的转换加速度计输出的是加速度,通常的单位是米每平方秒(m/s^2)。
在进行欧拉角计算时,需要确保加速度的单位与角速度统一,通常会直接使用加速度的单位进行计算。
5. 结论利用陀螺仪和加速度计计算欧拉角是飞行器姿态确定的重要方法之一。
在计算过程中,需要注意传感器输出的单位,并进行必要的转换,以确保计算结果的准确性。
在实际应用中,还需要考虑到传感器的误差、测量精度等因素,以获得更加稳定和可靠的姿态角度。
倾斜手机原理手机已经成为现代人日常生活中不可或缺的一部分。
除了常见的功能如通话、短信、上网等,手机还有一项十分实用的功能,那就是倾斜感应。
倾斜感应是指通过手机内部的感应器,实时检测手机的倾斜角度,并将这个信息传递给手机系统,从而实现一系列与倾斜相关的功能。
本文将介绍倾斜手机的工作原理以及其在生活中的应用。
一、倾斜手机的工作原理倾斜手机的工作原理主要依赖于加速度计和陀螺仪两种感应器。
加速度计是一种可以测量物体在三个维度上加速度的传感器,而陀螺仪则可以测量手机在三个维度上的旋转速度。
通过这两种感应器的协同工作,手机可以准确地检测到手机的倾斜角度。
当手机发生倾斜时,加速度计会感知到手机在竖直方向上的加速度变化,并将这个信号转化为电信号传递给手机系统。
同时,陀螺仪也会检测到手机的旋转速度,并将这个信息传递给手机系统。
手机系统会通过对加速度计和陀螺仪的数据进行分析和计算,来确定手机的倾斜角度。
二、倾斜手机在生活中的应用1. 自动旋转屏幕倾斜手机的最为常见应用之一就是自动旋转屏幕。
当我们将手机横向或纵向倾斜时,手机可以通过感应器检测到倾斜角度,并自动将屏幕的显示方向进行旋转,以便我们更好地观看内容。
这在浏览图片、观看视频等场景中尤为实用。
2. 倾斜游戏操控倾斜手机还广泛应用于各类游戏中,如赛车游戏、飞行游戏等。
通过倾斜手机,玩家可以实现更加真实的操控体验。
当手机倾斜时,游戏系统会根据倾斜角度进行响应,从而控制游戏人物或游戏车辆的移动方向。
3. 倾斜拍摄照片相比传统方式的拍摄,倾斜手机在拍摄照片时可以带来更多创意。
例如,通过倾斜手机可以实现倾斜摄影,以得到独特的视觉效果。
同时,一些照相应用还可以根据手机的倾斜角度进行实时调整,以获得更佳的拍摄效果。
4. 倾斜导航倾斜手机还可以应用于导航功能中。
通过倾斜手机,导航系统可以根据手机的倾斜角度来确定手机的朝向,从而提供更精准的导航指示。
这对于行车导航或者步行导航都有着重要的意义,可以帮助我们更加准确地找到目的地。
姿态角解算(MPU6050 加速度计加陀螺仪)本文持续更新…I2C通信AHRS是自动航向基准系统(Automatic Heading Reference System)的简称。
目前,使用四元数来进行AHRS姿态解算的算法被广泛采用于四轴飞行器上。
IMU部分:IMU是惯性测量装置(Inertial Measurement Unit)的简称,通常包含陀螺仪和加速度计。
1.陀螺仪:测量的是角速度,即物体转动的速度,把速度和时间相乘,即可以得到某一时间段内物体转过的角度。
(但是积分运算得来的角度本身就存在误差,随着时间的累加,误差会加剧,此时就需要加速度计辅助计算出姿态角度)2.加速度计:测量的是物体的加速度,我们知道,重力加速度是一个物体受重力作用的情况下所具有的加速度。
当物体处于静止状态时,加速度计测量出来的值就等于重力加速度1g, 约等于9.8米每平方秒。
重力加速度g的方向总是竖直向下的,通过获得重力加速度在其X轴,Y轴上的分量,我们可以计算出物体相对于水平面的倾斜角度。
典型的IMU惯性测量芯片为MPU6050,它被广泛采用在四轴飞行器上。
mpu6050便是这两种传感器结合测出姿态角,通常运用卡尔曼滤波得出最终角度根据加速度计和地磁计的数据,转换到地理坐标系后,与对应参考的重力向量和地磁向量进行求误差,这个误差用来校正陀螺仪的输出,然后用陀螺仪数据进行四元数更新,再转换到欧拉角陀螺仪的角速度测量:如果他的速度是1度不加秒,我们用速度乘以时间就可以知道他从起点走了多少度。
加速度计来测量倾角:一个简单的例子如下: 一个单轴的加速计位于重力水平面上的时候,它在垂直方向上受到的加速度为1g,在水平方向上受到的加速度为0。
当我们把它旋转一个角度的时候,就会在水平轴上产生一个加速度分量。
通过它们的关系,就可以计算出该单轴加速计的倾角。
1.通过陀螺仪的积分来获得四轴的旋转角度2.然后通过加速度计的比例和积分运算来修正陀螺仪的积分结果。
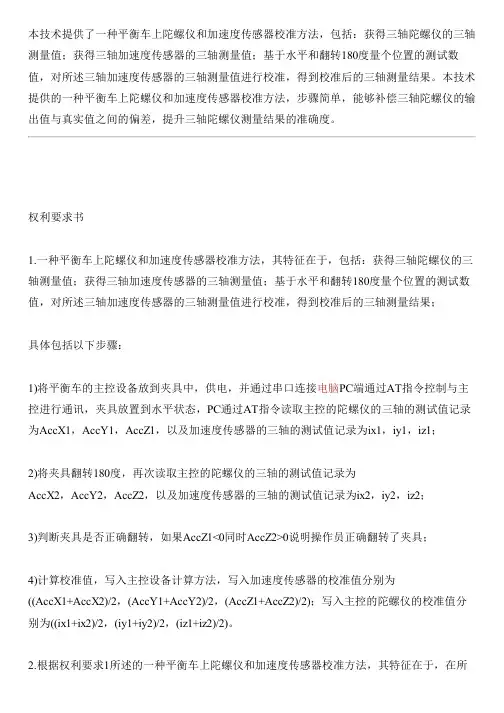
本技术提供了一种平衡车上陀螺仪和加速度传感器校准方法,包括:获得三轴陀螺仪的三轴测量值;获得三轴加速度传感器的三轴测量值;基于水平和翻转180度量个位置的测试数值,对所述三轴加速度传感器的三轴测量值进行校准,得到校准后的三轴测量结果。
本技术提供的一种平衡车上陀螺仪和加速度传感器校准方法,步骤简单,能够补偿三轴陀螺仪的输出值与真实值之间的偏差,提升三轴陀螺仪测量结果的准确度。
权利要求书1.一种平衡车上陀螺仪和加速度传感器校准方法,其特征在于,包括:获得三轴陀螺仪的三轴测量值;获得三轴加速度传感器的三轴测量值;基于水平和翻转180度量个位置的测试数值,对所述三轴加速度传感器的三轴测量值进行校准,得到校准后的三轴测量结果;具体包括以下步骤:1)将平衡车的主控设备放到夹具中,供电,并通过串口连接电脑PC端通过AT指令控制与主控进行通讯,夹具放置到水平状态,PC通过AT指令读取主控的陀螺仪的三轴的测试值记录为AccX1,AccY1,AccZ1,以及加速度传感器的三轴的测试值记录为ix1,iy1,iz1;2)将夹具翻转180度,再次读取主控的陀螺仪的三轴的测试值记录为AccX2,AccY2,AccZ2,以及加速度传感器的三轴的测试值记录为ix2,iy2,iz2;3)判断夹具是否正确翻转,如果AccZ1<0同时AccZ2>0说明操作员正确翻转了夹具;4)计算校准值,写入主控设备计算方法,写入加速度传感器的校准值分别为((AccX1+AccX2)/2,(AccY1+AccY2)/2,(AccZ1+AccZ2)/2);写入主控的陀螺仪的校准值分别为((ix1+ix2)/2,(iy1+iy2)/2,(iz1+iz2)/2)。
2.根据权利要求1所述的一种平衡车上陀螺仪和加速度传感器校准方法,其特征在于,在所述步骤1)和步骤2)测量三轴的测试值时,保证陀螺仪X轴垂直向上并静止。
技术说明书一种平衡车上陀螺仪和加速度传感器校准方法技术领域本技术涉及属于机器和仪器校准领域,具体是指一种平衡车上陀螺仪和加速度传感器校准方法。
3d数字陀螺仪工作原理3D数字陀螺仪工作原理引言:3D数字陀螺仪是一种用于测量物体姿态的传感器。
它能够感知物体的旋转、倾斜和方向变化,并将这些数据以数字形式输出。
本文将介绍3D数字陀螺仪的工作原理,包括其基本构成、测量原理及其应用领域。
一、基本构成3D数字陀螺仪通常由三个加速度计和三个陀螺仪组成。
加速度计用于测量物体的线性加速度,而陀螺仪则用于测量物体的角速度。
这些传感器通过微电机或者质心偏移来检测物体的旋转和倾斜。
二、测量原理3D数字陀螺仪的工作原理基于物体的转动力矩。
当物体发生旋转或倾斜时,其质心会发生偏移,从而引起微电机或质心偏移。
加速度计和陀螺仪能够测量这种偏移,并将其转化为电信号。
通过采集和分析这些信号,我们可以得到物体的姿态信息。
三、工作过程3D数字陀螺仪的工作过程分为三个步骤:采集、处理和输出。
1. 采集:加速度计和陀螺仪不断地采集物体的加速度和角速度数据。
这些数据以模拟信号的形式传输到陀螺仪芯片。
2. 处理:陀螺仪芯片会对采集到的模拟信号进行处理,包括滤波、放大和数字化。
滤波是为了去除噪声信号,而放大则是为了增加信号强度。
数字化将模拟信号转换为数字信号,方便后续处理。
3. 输出:经过处理后的数字信号会通过接口输出,供外部设备读取和分析。
常见的接口有I2C、SPI和UART等。
外部设备可以根据这些数据来计算物体的姿态并进行相应的控制。
四、应用领域3D数字陀螺仪广泛应用于航空航天、导航、运动控制等领域。
1. 航空航天:在飞行器的姿态控制中,3D数字陀螺仪可以提供精确的姿态信息,帮助飞行器保持平衡和稳定。
2. 导航:3D数字陀螺仪可以用于惯性导航系统,辅助定位和导航定位。
在没有GPS信号的环境下,仍然能够提供可靠的导航数据。
3. 运动控制:在运动控制领域,3D数字陀螺仪可以用于姿态稳定、动作捕捉和虚拟现实等应用。
例如,游戏手柄中的陀螺仪可以感知玩家的手腕动作,并将其转化为游戏中的相应操作。
imu传感器工作原理IMU(Inertial Measurement Unit),即惯性测量单元,是一种测量物体运动状态的传感器。
它主要由加速度计和陀螺仪两部分组成,其中加速度计用于测量物体的加速度,而陀螺仪则用于测量物体的角速度。
IMU适用于需要超高精度、实时性和大范围度量运动状态等领域,如惯导导航、飞行器控制、导弹制导、机器人定位等。
一、加速度计的工作原理加速度计是一种用于测量物体三维运动状态的传感器。
它的工作原理基于牛顿定律和热力学原理。
当物体受到力的作用时,它会产生加速度,而加速度计可以通过测量这个加速度来判断物体的运动状态。
通常,加速度计会采用霍尔效应、压电效应、微机械系统(MEMS)等技术进行制造。
以MEMS型号的加速度计为例,它是由微机械系统芯片和信号处理器组成的。
微机械系统芯片中包含了多个微小的质量块和弹簧,当物体受到加速度作用时,这些小的质量块会对芯片的结构造成微弱的位移,这个位移会被芯片上的传感电极检测到,然后送到信号处理器中进行计算,最终得出物体的加速度值和方向。
二、陀螺仪的工作原理三、IMU的工作原理IMU通过加速度计和陀螺仪的数据融合,可以获取物体的三维运动状态信息。
具体来说,当物体发生加速度时,加速度计可以测量出物体的加速度,并可以通过积分算法得出物体的速度和位移信息。
而当物体发生旋转时,陀螺仪可以测量出物体的角速度和旋转角度,进而可以推算出物体的方向和变形信息。
IMU的精度受到多种因素的影响,如器件本身的精度、单位安装中的偏差和校准等。
因此,在实际应用中,IMU需要进行精确的校准和误差补偿,在实现高精度度量的基础上,才能提高传感器的性能和可靠度。
PX4无人机传感器介绍PX4是一款开源的飞控软件,支持多种无人机平台,包括多旋翼、固定翼和垂直起降飞机。
为了实现高效且安全的飞行控制,PX4使用了各种传感器来获取飞行器的状态信息。
在本文中,我们将详细介绍PX4常用的传感器。
1. 加速度计(Accelerometer):加速度计用于测量飞行器在三个轴上的加速度,即飞行器的加速度状态。
通过检测加速度计所受到的力,可以计算出飞行器的姿态、速度和位移。
PX4通常使用三轴加速度计,即x轴、y轴和z轴。
加速度计常用于姿态估计,导航和高度控制等任务。
2. 陀螺仪(Gyroscope):陀螺仪用于测量飞行器在三个轴上的角速度,即飞行器的旋转速率。
通过检测陀螺仪所受到的力矩,可以计算出飞行器的旋转角度。
PX4通常使用三轴陀螺仪,即x轴、y轴和z轴。
陀螺仪常用于姿态估计,导航和控制等任务。
3. 磁力计(Magnetometer):磁力计用于测量地球磁场对飞行器的影响,即飞行器的地磁状态。
通过检测磁力计所受到的磁场强度,可以计算出飞行器的方向和位置。
PX4通常使用三轴磁力计,即x轴、y轴和z轴。
磁力计常用于导航,姿态估计和指南针校准等任务。
4. 气压计(Barometer):气压计用于测量飞行器所处的气压,即飞行器的高度状态。
通过检测气压计所受到的气压变化,可以计算出飞行器的高度和气压变化率。
PX4通常使用基于压电效应的气压计。
气压计常用于高度控制,导航和气象测量等任务。
5. 光流传感器(Optical Flow Sensor):光流传感器用于测量飞行器相对于地面的水平位移。
通过检测光流传感器所接收到的光的位移,可以计算出飞行器的相对位移。
PX4通常使用光流传感器来实现悬停、降落和避障等任务。
6. GPS(Global Positioning System):GPS用于测量飞行器的全球定位信息,包括经度、纬度、海拔和速度等。
通过接收卫星发射的信号,GPS可以计算出飞行器的当前位置和速度。
使用手机检测重力的方法手机检测重力是通过内置的加速度计或者陀螺仪来实现的。
这些传感器能够感知手机的加速度和角速度,从而帮助我们检测重力。
首先,我们来看一下加速度计的原理。
加速度计通过一个质量块和一条弹簧连接在一起。
当手机受到加速度时,质量块会相对于弹簧发生位移,这样就可以测量加速度。
手机中的加速度计通常是三轴的,即可以测量手机在X轴、Y轴和Z 轴方向上的加速度。
通过加速度计可以测量重力加速度的大小和方向。
在静止状态下,我们可以认为手机受到的加速度是重力加速度。
所以,如果我们将手机保持静止,并且将手机在一个平面上旋转,加速度计仍然会测量到重力加速度。
这是因为手机的旋转只会改变手机的方向,而不会改变手机受到的重力大小。
这就是为什么我们可以利用加速度计来检测重力。
通过测量手机在三个轴上的加速度,我们可以得到手机受到的重力大小和方向。
当手机保持水平时,X轴和Y 轴上的加速度将非常接近于0,而Z轴上的加速度将接近于9.8m/s²(按照地球上的重力加速度)。
如果手机被倾斜,X轴和Y轴上的加速度将不再为0,而是根据手机的倾斜角度发生变化。
除了加速度计,陀螺仪也可以被用来检测重力。
陀螺仪是一个用来测量角速度的传感器。
当手机旋转时,陀螺仪可以感知到手机的旋转速度和方向。
通过测量陀螺仪在三个轴上的角速度,我们可以得到手机的旋转状态。
当手机保持静止时,陀螺仪会测量到零角速度。
但是,当手机受到外力或者旋转时,陀螺仪将会测量到对应的角速度。
为了实现手机对重力的检测,我们可以使用手机的加速度计和陀螺仪。
一种常用的方法是结合两者的测量结果,使用计算公式进行推导和分析。
例如,可以通过加速度计和陀螺仪的数据来估计出手机的倾斜角度、旋转状态或者重力加速度的大小。
这样,我们就可以利用手机检测重力感应,实现一些重力相关的应用,比如游戏控制、屏幕自动旋转等。
需要注意的是,手机的加速度计和陀螺仪并不是完美的,会存在一些误差。
这些误差可能是由于传感器本身的精度问题,也可能是由于外界干扰引起的。
姿态传感器mpu6050原理MPU6050是一种常用的姿态传感器,它可以测量物体在空间中的姿态角度,如倾斜角、转动角等。
它的原理是基于MEMS技术,即微电子机械系统。
MPU6050内部包含了三轴加速度计和三轴陀螺仪。
加速度计用于测量物体在空间中的加速度,通过积分可以得到速度和位移。
陀螺仪则用于测量物体的角速度,通过积分可以得到角度变化。
通过结合加速度计和陀螺仪的测量结果,就可以得到物体的姿态角度。
具体来说,加速度计通过测量力的大小和方向来得到加速度,它利用微小的质量和弹簧结构来实现这一测量。
当物体发生加速度时,加速度计内部的质量会发生相对位移,从而产生电信号。
通过对这些电信号进行放大和处理,就可以得到物体在三个轴向上的加速度。
陀螺仪则是通过测量物体的旋转来得到角速度。
它利用了角动量守恒定律,通过测量力矩来间接测量角速度。
陀螺仪内部有一个旋转的转子,当物体发生旋转时,转子会受到力矩作用,从而产生电信号。
通过对这些电信号进行放大和处理,就可以得到物体在三个轴向上的角速度。
MPU6050将加速度计和陀螺仪的测量结果进行融合,并通过卡尔曼滤波算法进行数据融合和姿态解算。
这样就能够得到物体在空间中的姿态角度。
MPU6050的应用非常广泛,例如在无人机中可以用于姿态控制,使无人机能够稳定飞行。
在虚拟现实设备中,可以用于追踪用户的头部姿态,以实现更加沉浸式的体验。
此外,在机器人、运动追踪等领域也有着重要的应用。
总的来说,MPU6050是一种基于MEMS技术的姿态传感器,通过测量加速度和角速度来得到物体在空间中的姿态角度。
它的原理简单而有效,广泛应用于各个领域。
陀螺仪传感器产品原理
陀螺仪传感器是一种能够测量旋转速度和角度加速度的传感器,其原理基于陀螺效应。
陀螺效应是指旋转体在转动时,所受的作用力不再是沿着作用力方向产生的加速度,而是会产生一个垂直于作用力方向的附加力。
这个附加力会使得旋转体的运动轨迹发生偏离,形成所谓的陀螺效应。
陀螺仪传感器中利用了这种原理,使用旋转陀螺来感应旋转角度的变化。
当陀螺仪传感器发生旋转时,陀螺旋转轴会产生一个垂直于旋转轴的角速度,通过其他装置可以将这个角速度转换成电信号输出。
根据角速度积分原理,可以测量出旋转角度的变化。
陀螺仪传感器通常由微机电系统(MEMS)技术制成,其结构包括感测器部分和信号处理部分。
感测器部分通常由微型陀螺和加速度计组成,信号处理部分则负责对传感器输出信号进行放大、滤波、ADC转换和数据处理等工作。
综合应用陀螺仪传感器和加速度计的数据,可以得出旋转姿态、角速度、角加速度等信息,常用于导航、姿态控制、运动跟踪等领域。
陀螺仪的范围有±250、±500、±2000可选,而对应的精度分别是131LSB/(°/s)、65.5LSB/(°/s)、32.8LSB/(°/s)、16.4 LSB/(°/s)a.那么这个精度和范围的关系是什么?首先MPU6050数据寄存器是一个16位的,由于最高位是符号位,故而数据寄存器的输出范围是-7FFF~7FFF ,也既是-32767~32767;b.如果选择陀螺仪范围是±2000,那么意味着-32767对应的是-2000(°/s),32767对应是2000(°/s),当读取陀螺仪的值是1000的,对应的角速度计算如下:32767/2000 =1000/x; 既x = 1000/16.4(°/s),可以看出32767/2000 = 16.4 ,对应手册中的精度 16.4 LSB/(°/s),其他范围的也是如此。
c.在四轴姿态计算中,我们通常要把角度换算成弧度。
我们知道2Pi代表360度,那么1度换算成弧度就是:2Pi/360=(2*3.1415926)/360=0.0174532=1/57.30。
d.总结:当量程为-2000到+2000的范围,把陀螺仪获取的数据转换为真正的弧度每秒的公式:(gyro_x来代表从陀螺仪读到的数据): gyro_x/(16.40*57.30)=gyro_x*0.001064,单位为弧度每秒。
2、加速度计采用和陀螺仪同样的计算方法,当AFS_SEL=3时,数字-32767对应-16g,32767对应16g。
把32767除以16,就可以得到2048,即我们说的灵敏度。
把从加速度计读出的数字除以2048,就可以换算成加速度的数值。
举个例子,如果我们从加速度计读到的数字是1000,那么对应的加速度数据是1000/2048=0.49g。
g为加速度的单位,重力加速度定义为1g, 等于9.8米每平方秒。
概念介绍1. mems陀螺的定义与原理mems陀螺,全称微型电机系统陀螺,是一种利用微机电系统技术制造的小型陀螺仪,能够测量和感知旋转运动。
mems陀螺利用微型电机和微机电系统技术,将传统的陀螺仪缩小到微米级尺寸,具有体积小、功耗低、成本低等优点。
2. 加速度耦合效应的定义加速度耦合效应指的是mems陀螺在测量旋转运动时,由于其内部的加速度传感器和角速度传感器之间的物理位置关系,可能会产生加速度以外的干扰,导致测量结果产生偏差。
原理分析3. mems陀螺的工作原理mems陀螺内部主要由加速度传感器和角速度传感器组成。
加速度传感器可以检测物体的加速度变化,而角速度传感器则可以测量物体旋转运动的角速度。
通过这两个传感器的配合工作,mems陀螺可以实现对旋转运动的测量。
4. 加速度耦合效应产生的原因加速度耦合效应产生的原因主要是由于mems陀螺内部的加速度传感器和角速度传感器在物理位置上无法完全隔离开,加速度的变化会对角速度的测量产生干扰,从而影响测量精度。
影响与应对5. 加速度耦合效应对mems陀螺测量精度的影响加速度耦合效应的存在会使mems陀螺在实际应用中出现测量误差,特别是在复杂运动条件下,如振动环境、高加速度运动等情况下,影响将更加显著。
6. 加速度耦合效应的应对方法为了降低加速度耦合效应的影响,可以采用多种方法,例如对传感器布局进行优化、提高传感器的频率响应特性、采用数字滤波技术等,以确保mems陀螺具有更高的测量精度。
研究现状与发展7. 目前mems陀螺加速度耦合效应的研究现状目前,关于mems陀螺加速度耦合效应的研究已经取得了一定的进展,国内外学者对其影响机理、测量方法和校准技术等方面开展了深入研究,但仍存在一定的技术挑战和待解决的问题。
8. mems陀螺加速度耦合效应的发展趋势随着mems技术的不断进步和发展,mems陀螺对加速度耦合效应的抑制技术也将不断提升,从而实现更加精准的旋转运动测量,为航空航天、导航、导弹制导等领域提供更可靠的技术支持。