Matlab图像处理图像景物动态跟踪
- 格式:doc
- 大小:703.50 KB
- 文档页数:7
课程设计——图像去雾一、设计目的1、通过查阅文献资料,了解几种图像去雾算法,;2、理解和掌握图像直方图均衡化增强用于去雾的原理和应用;3、理解和掌握图像退化的因素,设计图像复原的方法;4、比较分析不同方法的效果。
二、设计容采用针对的有雾图像,完成以下工作:1、采用直方图均衡化方法增强雾天模糊图像,并比较增强前后的图像和直方图;2、查阅文献,分析雾天图像退化因素,设计一种图像复原方法,比照该复原图像与原始图像以及直方图均衡化后的图像;3、分析实验效果;4、写出具体的处理过程,并进展课堂交流展示。
三、设计要求1、小组合作完成;2、提交报告〔*.doc〕、课堂交流的PPT〔*.ppt〕和源代码。
四、设计原理〔一〕图像去雾根底原理1、雾霭的形成机理雾实际上是由悬浮颗粒在大气中的微小液滴构成的气溶胶,常呈现乳白色,其底部位于地球外表,所以也可以看作是接近地面的云。
霭其实跟雾区别不大,它的一种解释是轻雾,多呈现灰白色,与雾的颜色十分接近。
广义的雾包括雾、霾、沙尘、烟等一切导致视觉效果受限的物理现象。
由于雾的存在,户外图像质量降低,如果不处理,往往满足不了相关研究、应用的要求。
在雾的影响下,经过物体外表的光被大气中的颗粒物吸收和反射,导致获取的图像质量差,细节模糊、色彩暗淡。
2、图像去雾算法图像去雾算法可以分为两大类:一类是图像增强;另一类是图像复原。
图1-1介绍了图像去雾算法的分类:图1-1去雾算法分类从图像呈现的低亮度和低比照度的特征考虑,采用增强的方法处理,即图像增强。
比较典型的有全局直方图均衡化,同态滤波,Retine* 算法,小波算法等等。
基于物理模型的天气退化图像复原方法,从物理成因的角度对大气散射作用进展建模分析,实现场景复原,即图像复原。
运用最广泛、最权威的是由何凯明等人提出的暗通道先验的方法。
〔1〕图像增强技术为了改善视觉效果或者便于人们对图像的判别和分析,根据图像的特征采取简单的改善方法或者加强特征的措施叫做图像增强。
图像拼接算法及实现(一)来源:中国论文下载中心 [ 09-06-03 16:36:00 ] 作者:陈挺编辑:studa090420 论文关键词:图像拼接图像配准图像融合全景图论文摘要:图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。
图像拼接在摄影测量学、计算机视觉、遥感图像处理、医学图像分析、计算机图形学等领域有着广泛的应用价值。
一般来说,图像拼接的过程由图像获取,图像配准,图像合成三步骤组成,其中图像配准是整个图像拼接的基础。
本文研究了两种图像配准算法:基于特征和基于变换域的图像配准算法。
在基于特征的配准算法的基础上,提出一种稳健的基于特征点的配准算法。
首先改进Harris角点检测算法,有效提高所提取特征点的速度和精度。
然后利用相似测度NCC(normalized cross correlation——归一化互相关),通过用双向最大相关系数匹配的方法提取出初始特征点对,用随机采样法RANSAC(Random Sample Consensus)剔除伪特征点对,实现特征点对的精确匹配。
最后用正确的特征点匹配对实现图像的配准。
本文提出的算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。
Abstract:Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other, and finally builds a seamless and high quality image which has high resolution and big eyeshot. Image mosaic has widely applications in the fields of photogrammetry, computer vision, remote sensing image processing, medical image analysis, computer graphic and so on. 。
数字图像处理习题⼀、判断题(10分)(正确√,错误×)1.图像处理就是对图像信息进⾏加⼯处理,以满⾜⼈的视觉⼼理和实际应⽤的要求(√)2.在MA TLAB中,uint8是⽆符号8位整数(√)3.在MA TLAB中,uint16是⽆符号16位整数(√)4.图像的点运算与代数运算不相同(√)5.点运算也叫灰度级变换(√)6.线性点运算可以改变数字图像的对⽐度(√)7.图像的⼏何变换也叫图像的点运算(×)8.图像的平滑操作实际上是邻域操作(√)9.傅⽴叶变换后的矩阵处在频域上(√)10.傅⽴叶变换后的矩阵处在空域上(×)11.傅⽴叶变换,⼈们可以在空域和频域中同时思考问题(√)12.像素深度是指存储每个像素所⽤的位数(√)13.图像经过变换后,图像的⼤部分能量都集中在中、⾼频段(×)14.图像经过变换后,图像的⼤部分能量都集中在低频段(√)15.直⽅图均衡化也是⼀种⾮线性点运算(√)16.仿射变换是空间变换(√)17.空间变换是频域变换(×)18.边缘检测是将边缘像元标识出来的⼀种图像分割技术(√)19.灰度直⽅图能反映⼀幅图像各灰度级像元占图像的⾯积⽐(√)20.直⽅图均衡是⼀种点运算,图像的⼆值化则是⼀种局部运算(×)21.双边滤波法可⽤于边缘增强(×)22.均值平滑滤波器可⽤于锐化图像边缘(×)23.拉普拉斯算⼦可⽤于图像的平滑处理(×)24.⾼频加强滤波器可以有效增强图像边缘和灰度平滑区的对⽐度(√)25.应⽤傅⽴叶变换的可分离性可以将图像的⼆维变换分解为⾏和列⽅向的⼀维变换(√)26.图像分割可以依据图像的灰度、颜⾊、纹理等特性来进⾏(√)27.图像增强有空域和变换域两类(√)28.加⼤、减⼩对⽐度分别会使图像发⽣亮处更亮,暗处更暗的直观变化(√)29.加⼤、减⼩亮度分别会使图像发⽣亮处更亮,暗处更暗的直观变化(×)30.⼆值图像就是只有⿊⽩两个灰度级(√)31.⼀般来说,图像采样间距越⼤,图像数据量越⼤,质量越好;反之亦然(×)34.⼀般⽽⾔,对于椒盐噪声,均值滤波的效果好于中值滤波(×)35.与⾼斯低通滤波器相⽐,理想低通滤波低通滤波器在图像处理过程中更容易出现振铃(rings)(√)⼆、填空题(20分,1分/空)1.⼀般来说,图像采样间距越⼩,图像数据量_____,质量_____;反之亦然(⼤,⾼)2.若采样4个数,⼤⼩分别为4.56 0.23 7.94 16.55。
基于MATLAB的模糊图像的复原方法探究作者:陈睿来源:《消费电子·理论版》2013年第03期摘要:图像复原是图像处理的一个核心环节,它是后期图像分析和处理的重要前提。
模糊图像复原的主要目的就是改善图像质量,研究如从所得到的模糊图像中复原出真实图像。
本文首先从图像复原技术的相关概念谈起,然后就典型的模糊图像复原方法进行分析,最后利用MATLAB,以维纳滤波恢复算法为例,就实现模糊图像复原的应用实例进行分析说明。
关键词:图像复原;模糊图像;MATLAB;维纳滤波恢复算法中图分类号:TP391.41 文献标识码:A 文章编号:1674-7712 (2013) 06-0066-01一、图像的复原技术概述(一)认识图像复原。
图像复原技术即所谓的图像恢复技术,是当今图像处理研究的一个重要领域分支。
图像复原技术的目的在于去除或减轻在获取数字图像过程中发生的图像质量退化问题,从而使图像尽可能地接近于真实场景。
其中,所谓的图像质量退化问题指景物形成过程中因出现畸变、模糊、失真或混入噪声等现象所导致的图像降质问题。
(二)引起图像退化的原因。
查阅大量相关文献,笔者总结发现,导致图像退化的原因有很多,主要原因表现为如下几点:一是由于扫描非线性以及成像器件拍摄姿态问题所引起的图像几何失真;二是成像系统的畸变、象差、带宽有限等造成的图像失真;三是运动模糊,被拍摄景物与成像传感器之间因存在相对运动引起所成图像的运动模糊;四是图像在数字化处理、成像以及数据采集过程中引入的噪声;五是其他方面的原因,包括因光学系统或成像传感器本身特性不均匀所产生的灰度失真以及大气成分变化引起图像失真等。
(三)常见的图像复原方法的分类。
图像复原大致可以分为两种方法:一种方法是估计方法,该方法比较适用于缺乏图像先验知识的情况,针对这种情况可对图像退化过程建立模型进行描述,进而寻找一种去除或削弱其影响的过程;另一种方法是针对原始图像有足够的先验知识的情况,通过对原始图像建立一个数学模型并根据它对退化图像进行拟合,进而可以获得更佳的复原效果。
• 19•在人类传递信息的过程中,图像起到了非常重要作用。
在图像采集和储存设备方面,其种类非常多。
以往,我们多使用传统胶片照相机和摄像机,现在我们能够使用监控视频、行车记录仪以及无人机进行图像的采集和储存。
但是,很多时候,由于摄像头距离观察目标不确定,如果两者距离较远,那么可能会导致获取的图像像素不高的问题。
不仅如此,图像的采集还会受到很多外界环境条件的影响。
例如,夜间灯光光线不强和暴风暴雨天气都会影响到图像的采集。
笔者基于MATLAB,针对数字图像复原进行了相关研究。
在数字图像处理中,模糊图像复原是非常值得研究的一个领域。
特别是最近几年,模糊图像复原在国内外图像研究领域成为一个焦点问题。
关于模糊图像复原的研究成果正在多个研究领域所应用。
但是在进行相关研究的过程中,发现获取图像难以得到高质量保障。
众所周知,在很多时候,获取图像的设备会遇到光学系统像差以及大气扰动和系统噪声等影响。
如此,这些因素会导致图像发生模糊现象,甚至可能出现图像变形的情况。
鉴于此,我们为了提高图像的质量,有必要通过适当的方法,使图像复原,并使图像的质量得到提升。
1 数字图像复原1.1 数字图像成像数字图像:所谓图像,其实质是在光学或者光电材料中所形成的影像。
图像是客观存在的,是物体及其周围景物发出或反射的光线所形成的。
众所周知,图像的种类非常多。
数字图像和模拟图像这两者有一个共同点,那就是都是根据空间坐标和亮度色彩的改变来判断连续进行与否的。
根据图像,可将其定义为二维函数f(x,y),其中x 和y都是空间坐标。
如果对于所有空间坐标,其幅值是有限的和离散的数值。
对于这种离散化,我们称它为数字图像。
视频:视频的本质是通过图像按照时间序列所构成的,当然这些图像是存在一些细小差别的。
对于每一幅图像,其在细节上不完全相同,所以在视觉上会产生暂留现象,这样当连续的图像在以每秒超过24帧进行画面变化的时候,人的眼睛就很难发现其中的变化。
如此,我们在在视觉上看到了平滑的画面效果。
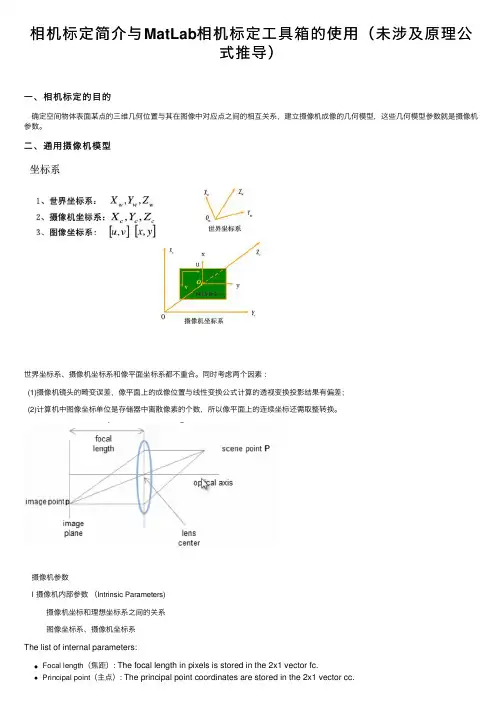
相机标定简介与MatLab相机标定⼯具箱的使⽤(未涉及原理公式推导)⼀、相机标定的⽬的确定空间物体表⾯某点的三维⼏何位置与其在图像中对应点之间的相互关系,建⽴摄像机成像的⼏何模型,这些⼏何模型参数就是摄像机参数。
⼆、通⽤摄像机模型世界坐标系、摄像机坐标系和像平⾯坐标系都不重合。
同时考虑两个因素:(1)摄像机镜头的畸变误差,像平⾯上的成像位置与线性变换公式计算的透视变换投影结果有偏差;(2)计算机中图像坐标单位是存储器中离散像素的个数,所以像平⾯上的连续坐标还需取整转换。
摄像机参数l摄像机内部参数(Intrinsic Parameters)摄像机坐标和理想坐标系之间的关系图像坐标系、摄像机坐标系The list of internal parameters:Focal length(焦距): The focal length in pixels is stored in the 2x1 vector fc.Principal point(主点): The principal point coordinates are stored in the 2x1 vector cc.Skew coefficient (偏斜系数): The skew coefficient defining the angle between the x and y pixel axes is stored in thescalar alpha_c.Distortions (畸变): The image distortion coefficients (radial and tangential distortions) are stored in the 5x1 vector kc.l 摄像机外部参数 (Extrinsic Parameters)摄像机在世界坐标系⾥的位置和⽅向摄像机坐标系、世界坐标系主要包括:旋转矩阵 R 的9个参数和平移矩阵的3个参数。
第二章数字图像处理的基本概念2. 图像数字化包括那两个过程?它们对数字化图像质量有何影响?答:图像数字化包括采样和量化两个过程。
采样:将空间上连续的图像变换成离散点的操作称为采样。
量化:将像素灰度转换成离散的整数值得过程叫量化。
影响:一般来说,采样间隔越大,所得图像像素越少,空间分辨率低,质量差,严重时出现像素呈块状的国际棋盘效应;采样间隔越小,所得图像像素数越多,空间分辨率高,图像质量好,但数据量大。
量化等级越多,所得图像层次越丰富,灰度分辨率高,图像质量好,但数据量大;量化等级越少,图像层次欠丰富,灰度分辨率低,会出现假轮廓现象,图像质量变差,但数据量小.3。
数字化图像的数据量与哪些因素有关?答:数字化前需要决定影像大小(行数M、列数N)和灰度级数G的取值.一般数字图像灰度级数G为2的整数幂。
那么一幅大小为M*N,灰度级数为G的图像所需的存储空间M*N*g(bit),称为图像的数据量.6。
什么是灰度直方图?它有哪些应用?从灰度直方图你能获得图像的哪些信息?答:灰度直方图反映的是一幅图像中各灰度级像素出项的频率之间的关系.以灰度级为横坐标,纵坐标为灰度级的频率,绘制频率同灰度级的关系图就是灰度直方图.应用:通过变换图像的灰度直方图可以,使图像更清晰,达到图像增强的目的。
获得的信息:灰度范围,灰度级的分布,整幅图像的平均亮度。
但不能反映图像像素的位置。
8。
图像处理按功能分有哪几种形式?答:按图像处理的输出形式,图像处理的基本功能可分为三种形式:(1)单幅图像-—>单幅图像;(2)多幅图像—-〉单幅图像;(3)单(或多)幅图像——>数字或符号等.12。
图像特性包括哪些类型?图像特征是图像分析的重要依据,它可以是视觉能分辨的自然特征,也可以是人为定义的某些特性或参数,即人工特征.数字图像的像素亮度、边缘轮廓等属自然特性;图像经过变换得到的频谱和灰度直方图等属人工特征.1、自然特征图像是空间景物反射或者辐射的光谱能量的记录,因而具有光谱特征、几何特征和时相特征。
图形对比度增强程序设计学生姓名:邱欣腾学号:12081327 指导老师:敖波摘要:MATLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括matlab和simulink两部分。
本次课程设计首先进行了课题的定位,进行一系列的资料查询和相关程序的查阅,其次分别学习了图像处理的基础知识和相关的操作要点,紧接着进行了Matlab语言的学习,从基础语言,基础语法再到程序的编写和运行调试,同时学习使用Matlab和图像处理各类知识相结合,从而对图像运用Matlab程序进行线性变换和非线性变换,最后将原图调入程序之中得到变换结果关键字:matlab、对比度、线性变换、非线性变换1、数字图像处理概括 (1)1.1图像的定义 (1)1.2 图像的基本属性 (2)1.3 数字图像处理的概念 (2)1.3.1数字图像处理的基本特点 (2)1.3.2 数字图像处理的主要应用 (3)1.3.3 数字图像处理的主要优点 (4)2、Matlab 基础知识 (5)2.1 MATLAB的概况 (5)2.2 MATLAB的基本知识 (5)2.2.1标识符与数 (5)2.2.2矩阵及其元素的赋值 (6)2.3 MATLAB的函数文件 (8)2.4 逻辑运算符 (9)2.5 控制流 (9)3、图像的调用 (13)3.1图像的读入和显示 (13)3.2 打开图像 (13)3.3 显示原图 (14)4、图像线性变换 (15)4.1 图像线性变换程序 (15)4.2 图像线性变换结果 (16)5、非线性变换 (18)5.1 图像非线性变换程序 (18)5.2图像非线性变换结果 (18)6、小结 (19)1、数字图像处理概括数字图像处理技术是20世界60年代发展起来的一门新兴学科,随着图像处理理论和方法的进一步完善,使得数字图像处理技术在各个领域得到了广泛应用,并显示出广阔的应用前景。
基于MATLAB的车牌识别研究摘要随着我国公路事业的发展,人工管理方式已经不能满足如今实际的需要。
车牌识别技术是计算机视频图像识别技术在车辆牌照识别中的一种应用,是现代智能交通系统(Intelligent Traffic System,简称ITS)中的重要组成部分之一。
车牌识别系统(vehicle license plate recognition system,简称LPR)使车辆管理更加智能化、数字化,有效提升了交通管理的效率。
对于交通管理、治安处罚等工作的智能化起着十分重要的作用。
它可广泛应用于交通流量检测,交通控制与诱导,机场、港口、小区的车辆管理,不停车自动收费,闯红灯等违章车辆监控以及车辆安全防盗等领域,具有广阔的应用前景。
而牌照作为机动车辆管理的唯一标识符号,使得车辆牌照识别系统的研究在机动车管理方面具有重要的实际意义。
本文通过对题目的研究,设计了一个基于Matlab软件的车牌识别程序,可实现图像预处理、车牌定位、字符分割,然后通过神经网络对车牌进行字符识别,从图像中提取车牌中的字母和数字,从而得到文本形式的车牌号码。
其中,图像预处理是通过图像灰度化及Roberts算子进行边缘检测完成。
车牌定位是通过数学形态法来确定,然后再通过车牌彩色信息的彩色分割法来完成车牌的切割。
字符分割是将车牌部分进行二值化后,进行垂直投影以及对投影部分扫描得到。
通过用该算法对三个问题中的照片和视频进行处理,可识别车辆牌照:问题1:image_1.jpg中牌照信息肉眼可识别为渝A•7Y618,但本算法未将汉字识别;image_2.jpg中牌照信息肉眼可识别为渝B•PY287,但本算法未将汉字识别,未将数字完整识别;image_3.jpg中牌照信息肉眼可识别为渝B•XW192,但本算法未能识别;问题2:image_4.jpg中牌照信息肉眼可识别为渝B•SU298,但本算法未能识别;image_5.jpg中牌照信息未能识别;问题3:video.avi中肇事车辆牌照信息未能识别。
1、数字图像处理的主要研究内容包含很多方面,请列出并简述其中的4种。
①图像数字化:将一幅图像以数字的形式表示。
主要包括采样和量化两个过程。
②图像增强:将一幅图像中的有用信息进行增强,同时对其无用信息进行抑制,提高图像的可观察性。
③图像的几何变换:改变图像的大小或形状。
④图像变换:通过数学映射的方法,将空域的图像信息转换到频域、时频域等空间上进行分析。
⑤图像识别与理解:通过对图像中各种不同的物体特征进行定量化描述后,将其所期望获得的目标物进行提取,并且对所提取的目标物进行一定的定量分析。
如要从一幅照片上确定是否包含某个犯罪分子的人脸信息,就需要先将照片上的人脸检测出来,进而将检测出来的人脸区域进行分析,确定其是否是该犯罪分子。
4、简述数字图像处理的至少4种应用。
①在遥感中,比如土地测绘、气象监测、资源调查、环境污染监测等方面。
②在医学中,比如B超、CT 机等方面。
③在通信中,比如可视电话、会议电视、传真等方面。
④在工业生产的质量检测中,比如对食品包装出厂前的质量检查、对机械制品质量的监控和筛选等方面。
⑤在安全保障、公安方面,比如出入口控制、指纹档案、交通管理等。
5、简述图像几何变换与图像变换的区别。
①图像的几何变换:改变图像的大小或形状。
比如图像的平移、旋转、放大、缩小等,这些方法在图像配准中使用较多。
②图像变换:通过数学映射的方法,将空域的图像信息转换到频域、时频域等空间上进行分析。
比如傅里叶变换、小波变换等。
6、图像的数字化包含哪些步骤?简述这些步骤。
图像的数字化主要包含采样、量化两个过程。
采样是将空域上连续的图像变换成离散采样点集合,是对空间的离散化。
经过采样之后得到的二维离散信号的最小单位是像素。
量化就是把采样点上表示亮暗信息的连续量离散化后,用数值表示出来,是对亮度大小的离散化。
经过采样和量化后,数字图像可以用整数阵列的形式来描述。
7、图像量化时,如果量化级比较小会出现什么现象?为什么?如果量化级数过小,会出现伪轮廓现象。
1 / 7
《图像处理技术》大作业
1 作业题目
基于图像的动态景物的监测与跟踪
2 作业数据
(1) 短视频背景相同,一个目标运动;
(2) 短视频(或5张图片),背景相同,多个目标运动;
(3) 验证数据自己提供(彩色、灰度图像不限);
3 作业完成目标
动态目标的定位与跟踪,并用方框提示并给出运动轨迹
能正确检测运动目标;
多个目标的识别率;
4 程序设计
1、 界面设计:
2 / 7
2、 “打开”按钮功能设计:
打开图片组的第一张图片并在左边显示:
[name,path]=uigetfile('*.jpg;*.bmp;*.png;*.tif;*.gif','Open Image');
file=[path,name]; %读取第一张图片路径
axes(handles.image1); %选择在左窗口显示
x=imread(file); %读取第一张图片
handles.img=x;
guidata(hObject,handles);
imshow(x); %显示第一张图片
global F; %全局变量F
F=name(1:end-5); %F为文件名编号前的字符
global N; %全局变量N
N=7; %N为图片组中图片总数量
3、 “播放”按钮功能设计:
读取图片组中所有的图片,并按一定间隔时间显示,形成动画效果:
global F;
global N;
axes(handles.image1); %选择在左窗口显示
for i=1:N %循环读出图片,形成动画效果
f=int2str(i);
I=strcat(F,f,'.jpg');%联接文件名
a=imread(I); %读取图片
imshow(a); %显示图片
axis off %关闭坐标轴
pause(0.8); %每显示一张图片暂停0.8秒
end
4、 “目标追踪”按钮功能设计:
读取图片,将图片转成二值图像,利用两张二值图像的异或求得目标,在目标图像
中求得目标的边框与质心,利用求得的边框画出目标的位置,利用存储的质心画出
目标移动轨迹:
global F;
global N;
x=handles.img;
axes(handles.image2); %选择在右窗口显示
s=size(x); %获取图片大小
A=uint8(zeros(s(1),s(2),1,N));
s=size(A); %获取图片组数组的大小
3 / 7
for i=1:s(4) %循环读取图片
t=int2str(i);
I=strcat( F,t,'.jpg');
a=imread(I); %读取图片
A(:,:,:,i)=rgb2gray(a);%转为灰度图片
end
B=logical(zeros(s(1),s(2),s(3),s(4)));%定义二值矩阵
for f=1:s(4)
imshow(A(:,:,:,f)); %显示图片
level=graythresh(A(:,:,:,f))-30/255; %获取阈值
B(:,:,:,f)=im2bw(A(:,:,:,f),level); %转为二值图像
B(:,:,:,1)=im2bw(A(:,:,:,1),level);
B(:,:,:,f)= xor(B(:,:,:,1),B(:,:,:,f)); %异或求得目标区域
B(:,:,:,1)= xor(B(:,:,:,1),B(:,:,:,1));
B(:,:,:,f)=medfilt2(B(:,:,:,f),[7 7]); %对二值图像中值滤波
L=bwlabel(B(:,:,:,f)); %计算二值图像的连通区域
stas=regionprops(L,'All'); %获取图像连通区信息
t=size(stas); %获取连通区数量
for j=1:t(1)
p(f,j,:)=stas(j).BoundingBox; %存储目标边框
y(f,j,:)=stas(j).Centroid; %存储目标位子(质心)
%画出目标边框
rectangle('Position',p(f,j,:),'LineWidth',2,'LineStyle','--','EdgeColor
','r');
for k=1:f %以小方点画出目标轨迹
rectangle('Position',[y(k,j,1),y(k,j,2),2,2],'LineWidth',2,'EdgeColor',
'b');
end
end
pause(0.8); %每处理一张图片暂停0.8秒
end
4 / 7
5 软件说明
1、 图片组中图片数量为7张,为RGB图像,命名时从1~7编号。
2、 打开软件后单击“打开”按钮,选中图片组的第一张图片,即可在左边显示
该图片。
3、 单击“播放”按钮,可以看到在左边显示图片动画。
4、 单击“目标跟踪”按钮,可以看到在右边显示出目标的跟踪效果。
6 效果图
1、 初始界面:
单目标跟踪:
2、 打开第一张图片:
5 / 7
3、 播放图片组动画:
4、 目标追踪,定位目标,显示轨迹:
6 / 7
多目标跟踪:
5、 打开第一张图片:
6、 播放图片组动画:
7 / 7
7、 目标追踪,定位目标,显示轨迹: