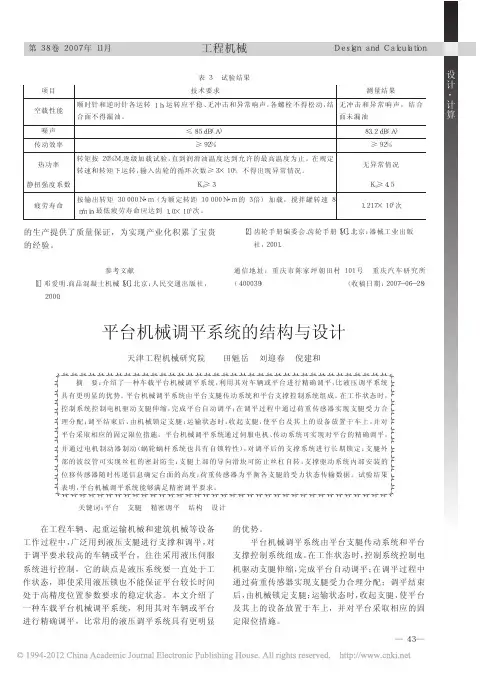
车辆平台液压自动调平装置方案
- 格式:doc
- 大小:134.50 KB
- 文档页数:4
车载机械自动调平机械系统设计作者:李浩东来源:《科学与财富》2018年第10期摘要:车载自动调平系统是高精度车载工作平台的重要组成部分,它既实现了高精度工作平台的水平精度,又缩短了系统的调平时间。
本文介绍了车载自动调平系统的组成及功能、工作原理、优势及技术特点、现实意义及市场前景。
文中研制了可使战车高炮系统到达各种凹凸路面地点后底盘快速精确达到水平的调平系统,使战车高炮系统迅速转换为作战状态或者常规状态,确保发出精确的炮弹角度,提高系统的机动性。
关键词:自动调平;控制系统;PLC;调平系统0 引言随着国内外军事形势和国防技术的发展,越来越多的军用设备需要根据任务需求随时变更工作地点。
对于装备各种重型武器的战车,必须保证在各种恶劣的地理环境下完成精确打击,并且保证这些军用设备的机动性能。
为了确保坦克火炮的连续射击精度,采用军用卡车底盘高射炮系统。
战场地形不均匀,如果仅仅使用轮胎支撑,水平误差将直接影响射击精度,弹性效果也会影响连续射击的稳定性。
因而火炮射击时,其底盘必须处于水平状态。
当卡车到达指定地点后,利用调平系统迅速将底盘调至水平状态,这样设备才能快速进入工作,工作完成后也能迅速转移。
此举既保证了设备的正常工作,又大大提高了设备的机动性。
1.调平系统组成及功能调平系统具备以下功能:平台全升、全降,撑腿落地自动检测,撑腿行程自动反馈,撑腿过行程和过载保护,水平监测,自动调平,撑腿自动锁定、解锁,本控、遥控等。
调平系统由4套水平展开机构、4套撑腿、1套双轴水平检测器、1套温控装置、1套控制箱、1套车外操作盒、电缆组等组成。
撑腿有电液式和机电式;控制箱由PLC控制器、低压电源、操作员面板、中间继电器和保护设备等组成。
各部分作用如下1)水平展开机构:实现撑腿水平展开和收回。
2)撑腿:车载自动调平系统的执行机构。
3)可编程控制器PLC:车载自动调平系统的控制核心。
控制命令通过PLC发出,同时采集反馈信号,使各个物理量构成一个个相对独立的闭环控制系统。

基于PLC的车载平台液压自动调平系统设计
甘志梅;寇桂岳
【期刊名称】《南昌工程学院学报》
【年(卷),期】2012(031)004
【摘要】很多车载设备需要调平后才能正常工作.以PLC为控制器、液压油缸为执行元件、双轴角度传感器作为反馈元件,采用最低腿调高法的调平策略,设计了一种车载平台的液压自动调平系统.并介绍了系统的液压系统组成及原理,控制系统硬件组成及软件实现方法.该系统调平速度快,调平精度高,能实现手动/自动调平切换且操作简单,有效提高车载平台的机动性.
【总页数】3页(P38-40)
【作者】甘志梅;寇桂岳
【作者单位】南昌工程学院机械与电气工程学院,江西南昌330099;南昌工程学院机械与电气工程学院,江西南昌330099
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于PLC控制的大载荷四点支撑液压自动调平系统设计 [J], 席广辉;王峰;皇淼淼;陶烨
2.基于PLC的车载自动调平系统设计 [J], 李志民;黄辰
3.基于PLC控制的专用液压机的液压控制系统设计 [J], 舒英利;
4.基于液压支腿的无人机自动调平液压系统设计及仿真分析 [J], 郭付
5.基于STC89C51的液压自动调平系统设计 [J], 肖克;徐世许;刘镔震;王京擘因版权原因,仅展示原文概要,查看原文内容请购买。
一种智能调平控制方式在汽车液压支腿系统上的应用(深圳市凯卓立液压设备有限公司李国雄)关键词:液压支腿智能调平单片机1.概述随着我国经济和社会的不断发展,各种不同功能的专用汽车也越来越多地走入我们的生产和生活之中。
很多专用汽车由于功能要求,往往都配备了液压支腿。
传统的液压支腿结构相对比较简单,一般都是由支腿油缸、液压系统、操作开关几部分构成。
功能也很单一,仅仅起到支撑和稳定作用。
当车辆或车载设备有更高的支撑要求时,传统的支腿就无法满足了。
比如:传统支腿就无法保证车辆的快速、准确的水平调整要求。
在这种情况下,用户往往会降低水平调整要求,采用目测和手动方式进行大致的调整;或者采取其他的辅助手段进行二次调整。
无论采用哪种方式,都无法克服调整周期长、精度低、变形大、重复性差、稳定性不高等缺点。
为从根本上解决传统的液压支腿在功能和应用方面的局限,深圳市凯卓立液压设备有限公司开发出一种全自动的智能调平控制方式,并成功地在液压支腿系统得到应用。
该控制系统内嵌微电脑,配合高精度双轴倾角传感器,采用独创的双轴联动控制方式,可自动检测车辆的水平状态,自动选择最快速和有效的控制方式,使车辆达到并保持水平状态。
该系统具有完整的压力检测和分配功能,并且改变了传统的“点”调整方式,独创性地采用“线”调整方式,从根本上避免了车辆的结构的扭曲、变形和支腿的“虚支撑”现象。
该系统具备了操作简单、环保、低能耗、高集成度等特点;形象化的操作指示和提示功能、完整的安全警示都为该系统的安装、使用和维护提供了极大的方便。
目前,已逐步替代传统的不具备自动调平功能的支腿控制系统,在相关应用领域得到推广应用。
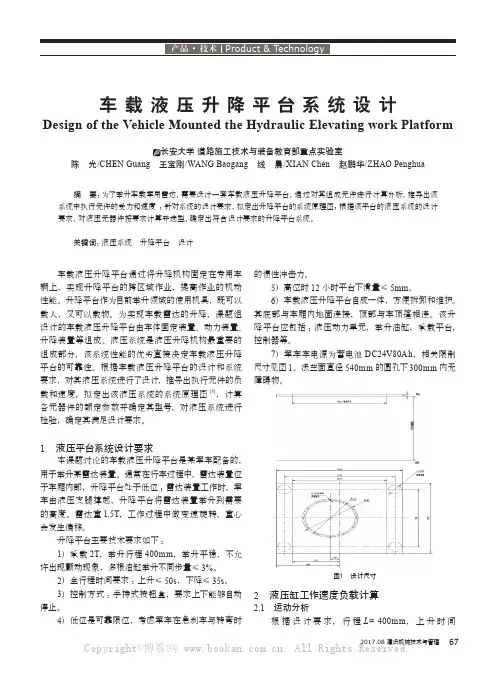
2.系统构成:液压支腿安装在汽车上的位置如图1所示。
全自动智能调平控制系统主要包含:水平传感器、单片机、控制电路、键盘显示板与控制支腿行程的液压系统及液压缸等组成。
硬件框图如图2所示。
系统启动后,单片机首先读取传感器方向设置开关,随后会监控键盘显示板的用户操作选择。
综采工作面液压泵站调平装置综采工作面设备列车布置在轨道顺槽内,由于巷道是高地起伏的,所以布置在设备列车上的液压泵站也是高地起伏的,但是液压泵站中泵箱、曲轴箱以及柱塞的油池均需要水平或≤±3°应用才能保证正常的吸液及润滑功能,因此在坡度大于±3°时采取人工手拉葫芦起吊垫木板的调平方式,在长期的操作过程中存在着及浪费人工又不安全的诸多不利因素,我队根据液泵站的特点在地面组装4306外工作面设备列车时对液压泵站进行了改造,具体改造方按如下:
1、在泵箱及泵的横向中心线的两侧上建立支点,并通过销轴进行铰接,其铰接中心线据车盘300mm。
2、在车盘的一侧安装调平油缸,其伸出量为600mm。
3、整个液压泵站敷设两路φ10的液压管路,并分别同乳化泵的主进回液管路相连,构成液压泵站的主进回液管路。
4、分别在一台清水泵箱、两台乳化泵箱以及两台清水泵、三台乳化泵的设备列车处敷设液压管路,用来控制调平油缸。
具体设计见附图。
车辆调平系统方案引言随着人们对行车安全和舒适性的要求日益提高,车辆调平系统成为了越来越多汽车厂商投入研发并加装的一款智能系统。
本文将介绍车辆调平系统的原理和应用方案。
车辆调平系统原理车辆调平系统是通过掌握车辆运动状态进行动态调整,使车辆在各个路况下保持稳定,降低驾驶员的疲劳程度和提高乘坐舒适性的一种智能控制系统。
其主要原理有以下两个方面:1.通过汽车的传感器收集车辆的运动状态信息,如重心位置、车速、加速度、车辆倾斜角度等参数。
2.通过车辆调平系统的控制器对车辆情况进行分析,并通过电磁阀、液压装置等部件进行动态调整,使车辆保持稳定。
车辆调平系统的核心部件是控制器,其在车辆行驶的过程中不断对车辆状态进行监测,如果发现车辆不平稳,就会进行调整,保证车辆的平稳行驶和乘坐的舒适性。
车辆调平系统应用方案车辆调平系统是一项非常先进的技术,具有非常广泛的应用范围。
以下是车辆调平系统的应用方案:1. 高端车型在很多高端车型中,车辆调平系统已经成为了标配。
由于高端车型在车身结构和悬挂系统的设计上具有较高的优越性,车辆调平系统可以进一步提高车辆的驾乘舒适性。
2. 越野车越野车在环境复杂的情况下行驶,有着较高的要求,同时在通过崎岖不平的路面时,车辆容易抖动,乘坐舒适性差。
因此,越野车的调平系统应该更具有适应性和强大性能。
3. 公共交通工具公共交通工具的舒适性对于乘客的体验和对公共交通的使用意愿都有非常重要的影响。
因此,很多公交车、高铁等工具中引入车辆调平系统,以提供更加舒适的乘坐体验,更好的保护乘客的安全。
结语车辆调平系统,作为一项智能化、安全化、舒适化的技术,其已经在很多领域得到了广泛的应用。
随着科技不断发展,我们相信车辆调平系统也会变得更加智能,更加普及,给人们带来更好的驾驶和乘坐体验。
车载自动调平装置的快速调平策略及智能控制苏文斌1 ,邓飙2 ,宋博仕1 ,郭秦阳1( 1西安交通大学 机械工程学院,西安 710049; 2第二炮兵工程大学 二系,西安710025)摘要: 针对车载自动调平装置快速性和高精度的要求,采用“以面调面”追逐最高支撑点的调平策 略。
执行机构内环采用模糊 P ID 同传统 P ID 相结合的 P ID 控制器,外环采用 P D 控制器进行同步 控制,同步误差经 P D 控制器对从动执行元件进行补偿,从而保证了调平的高精度及快速性。
试验 结果表明: 该调平装置调平时间减少了 29 s ,调平精度在 3.4'以内。
关键词: 模糊控制; 误差; 同步; 算法; 试验 中图分类号: TH 137.9文献标识码: A文章编号: 1003-8728( 2014) 12-1897-05The F a s t L e v e li n g S t r a t e g y and I n t e lli g e n t C o n t r o l of Automatic V e h i c l e L e v e li n g D e v i c eSu W enb i n 1 ,Deng B i ao 2 ,Song B osh i 1 ,Guo Q i nyan g 1( 1Sch o o l o f M e ch a n i c a l E n g i n e e r i n g ,Xi'a n J i a oto n g Un i v e rs i t y ,Xi'a n 710049;2The Secondary of the Second A r t ill e ry A c a d e m y ,Xi'a n 710025)Ab s t r ac t : Ai m i ng at t he re q u i rem ent of f ast res pons e and h i gh p re c i s i on in aut om at i c v eh i c l e l ev e li ng d ev i c e ,t he l ev e li ng strategy of c has i ng the h i ghest anc hor on s urfac e adjust ed to s urf ac e is em p l oye d . The fuzzy P ID c om b i n i ng w i th the tra d i t i ona l PID is us ed as the i nner c ontro ll er and t he PD c ontro ll er is used as the outer c ontro ll er to sy n c hron i c a ll y c ontro l t he a c t uator ,i n w h i c h the s y n c hron i zat i on error is c om pens at ed t o the s l av e actuat or by PD c ontro ll er to ens ure t he h i gh -p re c i s i on and f ast res p ons e . T he ex p er i m ents show that and t he l ev e li ng t i m e c an b e reduc e t o 29s and t he l ev e li ng p re c i s i on is l ess t han 3.4 p o i nts . T hus t he l ev e li ng strat egy and c ont ro l a l gor i t hm hav e the s i gn i f i c an c e in eng i neer i ng a pp li c at i on .K e y w o r d s : c om puter s il u l at i on ; c ontro ll ers ; error c om p ens at i on ; f uzzy c ont ro l ; sy n c hron i z at i on于 4 点支撑的发射台调平液压控制系统方案; 但两 者调平精度比较差。
车辆平台液压自动调平方案1 引言特种车辆在到达预定位置后,要求能快速架设精确的水平基准。
高水平度的稳定平台对于车辆特种仪器操作有重要影响。
以往车辆平台主要采用手动调整螺杆或手动液压千斤顶,通过目测气泡水平仪,由多人反复操作调节各螺杆支腿达到水平,这种方法调节时间长、水平精度低,操作难度大,且需要多人配合操作。
近年来,车辆平台的调平采用了自动调平系统,其中主要有机电调平系统和电液调平系统,大大缩短了调平的时间,提高了调平的精度,只需要启动电源即可完成全部架设与调平。
本方案论述电液调平的关键技术。
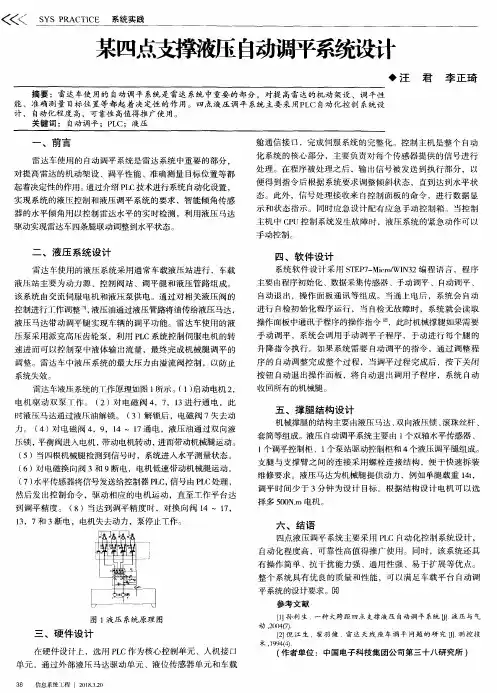
2 调平方案2.1 调平系统调平系统由检测、执行机构和控制系统3部分组成,具体包括双轴水平传感器、阀控液压缸和基于DSP的数字液压控制系统及相关连接电缆等组成。
(1) 检测装置为角度检测器,用来检测平台左右及前后的不平度。
其检测值的大小是系统判断是否进行调平的依据,其检测精度的高低直接决定了系统的最终调平精度。
(2) 调平执行机构采用4 个带有自锁功能的液压支腿,将其对称布置在车辆底座的两侧,由相应的电液阀控制,通过支腿的上下伸缩,实现车辆的调平。
(3) 控制系统是自动调平系统的核心组成部分,本方案采用基于DSP处理器的数字控制系统完成控制算法,采用智能功率驱动模块替代传统的继电器方式对液压缸电磁阀进行控制;通过数字控制器的软件程序控制液压机构动作,完成车辆的自动调平。
本方案设计考虑到安装的便利性将角度传感器集中在数字控制器内。
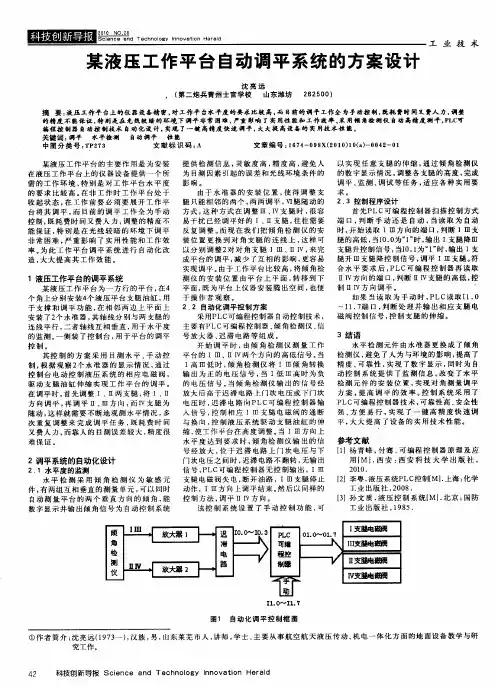
自动调平控制原理图如下:2.2 水平度误差分析图2 是4 点式承载平台示意图,采用4 个垂直液压缸来支撑平台。
图2 平台支撑示意图水平传感器沿X 、Y 方向布置, X 、Y 两个方向的水平倾角为α和β,两传感器间的夹角为γ,则平台的倾斜角度θ可由α和β合成为:给 定 控 制 精 度DSP 模块电平 转换 驱动 模块电磁阀 1 2 3 4液压缸1 液压缸2 液压缸3 液压缸4车 辆 平 台两自由度角度传感器数据采集模块 液压泵电源模块图 1 液压自动调平系统原理框图CPLD 逻辑 控制如果两个方向的控制精度为±δ,则调平后平台的水平误差为:从上式可以得出,控制精度δ给定,当γ= 90°时,即两传感器垂直布置,平台的水平误差θ有最小值,此时:θ= 2δ。
车载式高空作业车平台调平机构车载式高空作业车平台调平机构车载式高空作业车从结构形式上分折叠臂式、伸缩臂式和混合臂式等3种,平台调平机构的形式大致分为自重调平机构、平行四连杆调平机构、链条链轮式调平机构、静液压调平机构(伺服液压缸调平机构)和电液调平机构等。
当高空作业车臂架升降过程中,臂架和水平面必然会产生一定的夹角,引起平台以相同角度倾斜,因此,要求调平机构能够实时地对平台的倾斜角度进行调整,使平台处于要求的安全状态。
不同的调平方式,对实时调整平台的倾斜角度有所差别。
自重调平机构平台的重心在作业平台与臂杆连接的转动铰点的正下方,且靠近底部,利用工作平台和载荷的重力作用可以使平台无论如何升降都能自动保持在接近水平的状态。
该方法结构简单,重量轻,调整维修方便,成本低,但调整精度不高,且易晃动,特别是当操作人员在平台中的位置变动时,平台产生摇动,操作人员有不安全的感觉。
因此,在平台达到作业位置后要使用锁紧机构防止晃动,操作起来比较麻烦,仅在工作高度较低、技术性能低的作业车上使用,现在已较少使用。
平行四连杆调平机构平行四连杆调平机构由多组平行四边形连杆机构组成,调平机构一端与平台相连,另一端与转台连接,上平行四边形和下平行四边形相连处的短边固联在一起,利用平行四边形在变形过程中2组对边始终分别保持平行的原理,无论折叠臂如何升降,工作平台始终保持水平状态。
调平过程是连续的,具有调平可靠、同步性好的特点,且在实际应用中折叠臂本身可作为平行四边形的1个边。
因此,结构比较简单,主要用在折叠臂式高空作业车上。
早期的平行四连杆机构布置在臂架的外侧,结构不紧凑,现在可将其布置在臂内侧,但缺点是由于平行四连杆的限制,与平台连接的吊臂和平台之间的工作角度范围小于180。
,控制精度不高。
将链条更换成钢丝绳,也可起到调平作用,但由于钢丝绳是柔性连接,故在调平精度和平稳性能方面不如链条链轮式好。
目前,2节折臂且带有1节小臂的折叠臂高空作业车多使用链条链轮拉杆式调平机构。
车载平台的液压调平系统设计
李艳;高强;陆辉山;闫宏伟
【期刊名称】《机械》
【年(卷),期】2016(000)003
【摘要】载重平台工作时需要将平台调整到水平状态以提高系统的工作性能,本文旨在设计一种控制方法,应用于液压调平控制系统中.考虑了常规PID控制的参数不可调节性,采用了可以自动调整控制器参数的自适应控制方法,并对两种控制方法进行比较.根据液压缸工作原理,建立液压支腿建立数学模型,在Matlab/Simulink中分别建立两种控制方法的仿真模型,并对仿真结果进行比较.结果表明自适应控制相对于常规PID控制而言具有较强的鲁棒性、稳态精度高,能够很好地完成对承载平台的调平.
【总页数】6页(P14-19)
【作者】李艳;高强;陆辉山;闫宏伟
【作者单位】中北大学机械与动力工程学院,山西太原030051;中北大学机械与动力工程学院,山西太原030051;中北大学机械与动力工程学院,山西太原030051;中北大学机械与动力工程学院,山西太原030051
【正文语种】中文
【中图分类】TH137
【相关文献】
1.基于PLC的车载平台液压自动调平系统设计 [J], 甘志梅;寇桂岳
2.基于AMES im车载平台液压调平系统动态特性仿真 [J], 游雷;刘克福;蒋代君;李志成;肖宜
3.车载平台液压控制调平系统的组成及其故障分析 [J], 解小琴
4.基于液压支腿的无人机自动调平液压系统设计及仿真分析 [J], 郭付
5.一种车载平台随动自调平系统设计 [J], 邱兵;李凡贡
因版权原因,仅展示原文概要,查看原文内容请购买。
液压油缸自动调平装置原理篇一《液压油缸自动调平装置的神奇“魔法”》咱得说说这液压油缸自动调平装置,听起来挺高大上,其实理解起来也没那么复杂,给你们讲个事儿你们就知道啦。
去年我一朋友接了个工程,是给一个小厂搭建个简易的物料搬运平台。
这个平台要能稳定地承载重物,还得保证在各种情况下都能保持基本水平,不然东西放上去歪歪扭扭的,那不得闹笑话啊。
一开始呢,他们用的是传统的调平方法,几个工人师傅拿着工具,这边敲敲,那边垫垫,费了老大力气,可那效果啊,就跟“打地鼠”似的,这边弄好了,那边又歪了。
后来啊,有人就提议干脆用这液压油缸自动调平装置试试。
这装置一装上去,嘿,还真不一样。
这原理嘛,简单说就是通过液压系统来感知平台各个部位的压力变化。
比如说,当平台一边因为放了重物或者地面不平整有点下沉的时候,相应位置的液压油缸那个小小的传感器就能敏锐地察觉到压力增大了。
这就好比咱们人的神经感受到疼了一样,立马就会有反应。
然后呢,这个装置里的“小脑瓜”——也就是控制器,就会根据传感器传来的信号开始“思考”啦。
它会指挥液压系统调整油缸中液压油的流量和压力,让下沉那边的油缸伸长,把平台又给顶回水平状态。
就跟咱们玩跷跷板一样,哪边低了,就给那边加点“力”,让它升起来。
我那朋友跟我形容啊,装了这装置之后,那调平的过程就跟变魔术似的,原本一群人忙得热火朝天、手忙脚乱的场面没有了,安安静静地平台自己就调平了,效率提高不说,还特别精准,真正做到了省心又省力。
所以啊,这液压油缸自动调平装置的原理虽然有点技术含量,但它带来的便利那可是实实在在看得见的。
咱得佩服那些想出这个好点子的人,真的是帮大家解决了大麻烦。
篇二《瞧!液压油缸自动调平装置的“小聪明”》说起这液压油缸自动调平装置啊,我又想到另外一件有意思的事儿。
我老家有个亲戚搞农业种植的,弄了个蔬菜大棚。
这大棚嘛,得有一些可以移动的灌溉设备,不然浇水施肥可太麻烦了。
但是啊,这大棚地面也不是那么平整,那灌溉设备走起来就跟喝醉了似的,东倒西歪的。
车辆平台液压自动调平方案
1 引言
特种车辆在到达预定位置后,要求能快速架设精确的水平基准。
高水平度的稳定平台对于车辆特种仪器操作有重要影响。
以往车辆平台主要采用手动调整螺杆或手动液压千斤顶,通过目测气泡水平仪,由多人反复操作调节各螺杆支腿达到水平,这种方法调节时间长、水平精度低,操作难度大,且需要多人配合操作。
近年来,车辆平台的调平采用了自动调平系统,其中主要有机电调平系统和电液调平系统,大大缩短了调平的时间,提高了调平的精度,只需要启动电源即可完成全部架设与调平。
本方案论述电液调平的关键技术。
2 调平方案
2.1 调平系统
调平系统由检测、执行机构和控制系统3部分组成,具体包括双轴水平传感器、阀控液压缸和基于DSP的数字液压控制系统及相关连接电缆等组成。
(1) 检测装置为角度检测器,用来检测平台左右及前后的不平度。
其检测值的大小是系统判断是否进行调平的依据,其检测精度的高低直接决定了系统的最终调平精度。
(2) 调平执行机构采用4 个带有自锁功能的液压支腿,将其对称布置在车辆底座的两侧,由相应的电液阀控制,通过支腿的上下伸缩,实现车辆的调平。
(3) 控制系统是自动调平系统的核心组成部分,本方案采用基于DSP处理器的数字控制系统完成控制算法,采用智能功率驱动模块替代传统的继电器方式对液压缸电磁阀进行控制;通过数字控制器的软件程序控制
液压机构动作,完成车辆的自动调平。
本方案设计考虑到安装的便利性将角度传感器集中在数字控制器内。
自动调平控制原理图如下:
2.2 水平度误差分析
图2 是4 点式承载平台示意图,采用4 个垂直液压缸来支撑平台。
图2 平台支撑示意图
水平传感器沿X 、Y 方向布置, X 、Y 两个方向的水平倾角为α和β,两传感器间的夹角为γ,则平台的倾斜角度θ可由α和β合成为:
给 定 控 制 精 度
DSP 模块
电平 转换 驱动 模块
电磁阀 1 2 3 4
液压缸1 液压缸2 液压缸3 液压缸4
车 辆 平 台
两自由度角度传感器
数据采集模块 液压泵
电源模块
图 1 液压自动调平系统原理框图
CPLD 逻辑 控制
如果两个方向的控制精度为±δ,则调平后平台的水平误差为:
从上式可以得出,控制精度δ给定,当γ= 90°时,即两传感器垂直布置,平台的水平误差θ有最小值,此时:θ= 2δ。
也就是说,两边的水平控制精度应为整个平台水平控制精度的1/2 。
2.3 调平方法
调节一个平面到水平状态的调节过程可以有单向调节和多点调节
两种方案。
若采用多点调节,即各点都同时运动,调整到一个预定点,其特点是速度快,但会出现相互干涉耦合现象且算法复杂。
本方案采用单向调节的方案,即先将X 轴方向调平,再将Y 轴方向调平。
虽然调节时间稍长,但协调性好。
调平过程中调节的实际上是4 点的相对高度,为了避免虚腿的产生,提高系统的调节精度,调节过程采用向最高点看齐的方法(通过水平传
感器的检测信号可以找出平台的最高点),即保持相对最高点不动,把
低点调高,这样平台就只有上升运动。
2.4 调平控制算法流程
在车辆平台的4个支腿全部着地后, 控制系统开始进行调平,调平
过程如图3所示。
图3 调平控制流程图
以上方案为自动调平系统的原理方案论述。