微电网的总体结构
- 格式:ppt
- 大小:5.83 MB
- 文档页数:130
第二轮次(选择、判断)一、填空题(每题1分,共60分)1、智能电网是将先进的传感量测技术、信息通信技术、分析决策技术和自动控制技术与能源电力技术以及电网基础设施高度集成而形成的新型现代化电网。
2、智能电网具备的主要特征是:坚强、自愈、兼容、经济、集成、优化。
3、智能电网是电网技术发展和社会经济发展的必然选择。
4、坚强智能电网是以特高压电网为骨干网架、各级电网协调发展的坚强网架为基础,以通信信息平台为支撑,具有信息化、自动化、互动化特征的现代电网。
5、坚强智能电网包含电力系统的发电、输电、变电、配电、用电和调度各个环节,覆盖所有电压等级,实现了“电力流、信息流、业务流”的高度一体化融合。
6、坚强的内涵是指具有坚强的网架结构、强大的电力输送能力和安全可靠的电力供应。
‘7、特高压输电具有远距离、大容量、低损耗、高效率的优势。
8、坚强智能电网的发展,使得电网功能逐步扩展到促进能源资源优化配置、保障电力系统安全稳定运行、提供多元开放电力服务、推动战略性新兴产业发展等多个方面。
9、建设坚强智能电网将促进特高压、柔性输电、经济调度等先进技术的推广和应用,降低输电损失率,提高电网运行经济性。
10、建设坚强智能电网可以显著提高电网对清洁能源的接入、消纳和调节能力,有力地推动清洁能源的发展。
11、智能发电的发展目标是通过深入研究和应用网厂协调技术、风电及太阳能发电并网技术和大容量储能技术,促进电源结构优化,适应清洁能源规模化发展。
12、智能发电主要涉及常规能源、清洁能源和大容量储能应用等技术领域。
13、在清洁能源方面,智能电网主要开展风电场、光伏电站的建模、系统仿真、功率预测和并网运行控制等先进技术的研发及推广应用。
14、与广泛使用的常规能源(如煤、石油、天然气、水能等)相比,新能源是指在新技术基础上开发利用的非常规能源,包括风能、太阳能、海洋能、地热能、生物质能、氢能、核聚变能、天然气水合物能源等。
15、并网型风力发电系统是指风电机组与电网相联,向电网输送有功功率,同时吸收或者发出无功功率的风力发电系统。
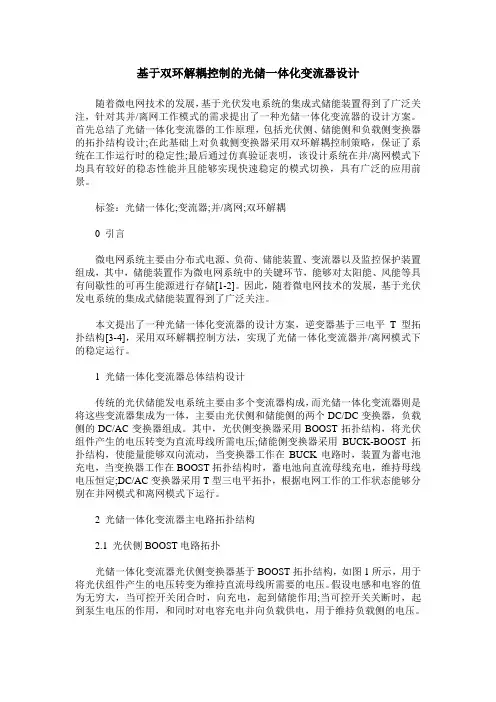
基于双环解耦控制的光储一体化变流器设计随着微电网技术的发展,基于光伏发电系统的集成式储能装置得到了广泛关注,针对其并/离网工作模式的需求提出了一种光储一体化变流器的设计方案。
首先总结了光储一体化变流器的工作原理,包括光伏侧、储能侧和负载侧变换器的拓扑结构设计;在此基础上对负载侧变换器采用双环解耦控制策略,保证了系统在工作运行时的稳定性;最后通过仿真验证表明,该设计系统在并/离网模式下均具有较好的稳态性能并且能够实现快速稳定的模式切换,具有广泛的应用前景。
标签:光储一体化;变流器;并/离网;双环解耦0 引言微电网系统主要由分布式电源、负荷、储能装置、变流器以及监控保护装置组成,其中,储能装置作为微电网系统中的关键环节,能够对太阳能、风能等具有间歇性的可再生能源进行存储[1-2]。
因此,随着微电网技术的发展,基于光伏发电系统的集成式储能装置得到了广泛关注。
本文提出了一种光储一体化变流器的设计方案,逆变器基于三电平T型拓扑结构[3-4],采用双环解耦控制方法,实现了光储一体化变流器并/离网模式下的稳定运行。
1 光储一体化变流器总体结构设计传统的光伏储能发电系统主要由多个变流器构成,而光储一体化变流器则是将这些变流器集成为一体,主要由光伏侧和储能侧的两个DC/DC变换器,负载侧的DC/AC变换器组成。
其中,光伏侧变换器采用BOOST拓扑结构,将光伏组件产生的电压转变为直流母线所需电压;储能侧变换器采用BUCK-BOOST拓扑结构,使能量能够双向流动,当变换器工作在BUCK电路时,装置为蓄电池充电,当变换器工作在BOOST拓扑结构时,蓄电池向直流母线充电,维持母线电压恒定;DC/AC变换器采用T型三电平拓扑,根据电网工作的工作状态能够分别在并网模式和离网模式下运行。
2 光储一体化变流器主电路拓扑结构2.1 光伏侧BOOST电路拓扑光储一体化变流器光伏侧变换器基于BOOST拓扑结构,如图1所示,用于将光伏组件产生的电压转变为维持直流母线所需要的电压。
提高微电网孤网运行品质的改进下垂控制方法研究周文琦;戴武昌;赵冠雄【摘要】当微电网运行在孤岛状态时,传统下垂控制由于受线路参数不匹配因素影响,难以按照下垂系数对无功功率进行合理分配.为了提高孤网微电网运行品质,提出了一种基于SOGI-FLL技术的改进下垂控制策略.在传统下垂控制的基础上引入了SOGI-FLL(二阶广义积分)环节和电压补偿环节,利用SOGI-FLL能够对输入信号进行快速实时跟踪的特点实现线路参数识别环节,利用线路参数对无功分配的影响加入电压补偿环节,从而达到无功功率的合理分配且不会造成公共点PCC端电压越限.Mat-lab/Simulink仿真验证了有效性和准确性.【期刊名称】《东北电力大学学报》【年(卷),期】2019(039)002【总页数】8页(P22-29)【关键词】微电网;SOGI-FLL环节;线路参数识别;改进下垂控制;无功功率均分【作者】周文琦;戴武昌;赵冠雄【作者单位】东北电力大学电气工程学院,吉林吉林132012;东北电力大学电气工程学院,吉林吉林132012;东北电力大学电气工程学院,吉林吉林132012【正文语种】中文【中图分类】TM727近几年来,分布式发电越来越成为未来电力系统发展的主要趋势.分布式发电很大程度上开发和利用了可再生能源,具有污染小,减少输电线路损耗等优点.微电网由分布式电源(DG)、电力电子装置、储能装置、继电保护装置和负荷等设备构成,可在并网状态和孤网状态两种状态运行[1~3].当微电网处于并网运行状态时,由于电压与频率均受大电网的影响,较易实现功率合理分配;当微网处于孤网运行状态时,由于各DG的线路阻抗不匹配,造成各DG无法按照其额定容量对系统中所需的总无功按比例分配,且各并联逆变器之间形成无功环流[4~5],严重影响了系统的运行品质.因此,合理分配各DG输出的无功功率的问题成为了现如今微电网研究的热点之一.由于线路参数不匹配而造成不能合理分配无功的情况,国内外学者提出了多种方法.文献[6]提出了在工频下DG输出的电压中注入一定频率的谐波,根据谐波的功率来调整输出电压,进而达到合理分配无功功率的目的.但由于谐波的输入,导致系统中输出电压发生畸变,值得注意的是在输出感性阻抗的线路中容易放大谐波,导致增加了测量输出功率的难度.文献[7]在传统下垂控制中加入了积分环节,通过增加电压补偿的方法补偿积分输出的电压变差量从而控制无功分配.但上述方法增大了应用到实际工程的难度.当线路阻抗中的电阻量不可忽略时,文献[8]提出了旋转坐标虚拟功率的方法,利用线性传递矩阵达到有功功率与无功功率解耦,进而达到控制无功的目的.文献[9]提出了采用P-V和Q-f控制,同样将有功和无功进行解耦并控制了功率的分布,上述方法均需获得精准的阻抗比,很难应用于工程实践.为此,国内外学者纷纷对传统下垂控制进行改进,文献[10]采用变下垂增益步长的自适应下垂控制,通过调整下垂增益改变无功分布,但该方法依赖通讯,降低了系统的稳定性.且当下垂增益过大时,导致PCC端电压跌落.文献[11~13]在原有的下垂控制中加入了虚拟阻抗,以此减轻了在线路不匹配情况下存在的无功环流.但由于虚拟阻抗的接入,导致输出电压偏低,从而影响了系统电能质量.文献[14]提出了一种基于公共母线电压的改进下垂控制,通过利用电压幅值控制有功功率,利用电压的d轴量与q轴量的比值来控制无功功率,但该方法受系统频率影响过大.以上方法在重新分配无功的同时,却也导致了电压不同程度的跌落,影响了系统运行品质.综上所述,现有大部分方法均不同程度的对传统下垂控制进行了改进,文献[6~9]均很难实践于实际工程中,而文献[10~14]均不同程度的影响了系统的电能质量.为此,本文提出了一种基于SOGI-FLL线路参数识别环节下的改进下垂控制,即在传统的下垂控制中加入针对识别结果对应的无功偏差量,从而达到控制系统中无功的精确分配.该方法仅利用本地信号即可控制无功功率的分配,且对PCC端电压影响较小.通过Matlab/Simulink仿真验证了所提出方案的有效性.1 微电网的系统结构图1 微电网系统结构图微电网(Micro-Grid)也称为微网,主要是由多个分布式电源(DG)、储能系统、以及电力电子装置和负荷组成,系统结构如图1所示.每一个DG是由逆变器、滤波器通过连接馈线连接到公共母线上.微网与大电网通过公共点(PCC端)相连,由中央控制器控制PCC端的静态开关实现两种运行模式的平滑切换.当微网处于并网运行状态时,由中央控制器发出信号控制每个DG输出相应的有功功率以及无功功率.该控制方法已经相对成熟,本文将不予研究.本文仅针对微电网孤网运行状态下的功率均分问题展开研究.1.1 孤网运行下的功率控制方法孤网运行下的功率控制方法主要有以下两种.1)主从控制.是指当微网处于孤网运行状态时,主控DG单元采用恒压/恒频率控制(即V/f控制),为其他从控DG单元提供参考电压及参考频率.其他DG作为从控单元采用恒功率控制(即PQ控制),按照给定计划发出有功和无功.但该控制方法依赖逆变器之间的通讯,影响微网运行的可靠性.2)下垂控制.该控制方法采用了传统电网中发电机P-f的关系,Q-V的关系组成的一种“即插即用”的控制方法.解决了主从控制中依赖通讯的问题,提高了系统运行的可靠性.本文将针对微电网孤岛运行状态的下垂控制展开研究.图2 微电网等效电路图2 微电网传统下垂控制方法两台相同DG通过逆变器[15]并联接入微电网的等效模型,如图2所示.在孤岛运行状态下,各DG通过各自的下垂曲线控制有功和无功出力情况,进而调节相应的频率与电压,从而保持系统的稳定运行.图2中U1、U2、φ1和φ2分别为逆变器1、2的空载电压幅值和逆变器1、2与公共点PCC端E∠0的相角差:R1和R2分别为逆变器1、逆变器2的输出电阻;X1和X2分别为逆变器1、逆变器2的输出感抗.RL1和RL2分别为线路1、逆变器2的电阻;XL1和XL2分别为线路1、逆变器2的电抗.在微电网系统中,一般为阻性低压线路.传统下垂控制主要适用于感性线路,在逆变器出口端接LCL滤波器,其中La和Ca为滤波器电感和电容,且接入输出电抗器Li可使线路参数视为感性.除此之外,如接入虚拟阻抗的方法也可以解决输出阻抗呈阻性的问题.由于感性线路中,φ很小近似于0,因此cosφ≈1,sinφ≈0;且线路中等效电抗远大于等效电阻,即X≫R.因此逆变器输出的有功功率和无功功率为(1)(2)公式中:i=1,2.由公式(1)和公式(2)可知,逆变器输出的有功功率与相角强相关,而输出的无功功率与电压幅值强相关.因此传统下垂控制表达式可表示为f=f*-mkP,(3)U=U*-nkQ,(4)公式中:mk和nk分别为有功功率下垂系数和无功功率下垂系数; f*和U*分别为逆变器参考频率和参考电压幅值; f和U分别为逆变器实际输出频率和实际输出电压幅值.将公式(2)与公式(4)联立可得(5)图3 线路参数不匹配无功分配情况由公式(5)可知,各DG输出的无功功率与线路等效阻抗、公共点电压幅值,逆变器参考电压幅值、功角和无功功率下垂系数有关.在线路阻抗不匹配情况下,各DG输出的无功功率情况,如图3所示.两个DG的无功功率下垂系数相同时,即nk1=nk2时,且线路不匹配的情况下,即当X1>X2,DG1输出的无功功率小于DG2输出的无功功率.为使各DG按额定功率的比例输出无功功率,本文将对现有下垂控制进行改进.图4 双电源并联结构图3 基于SOGI-FLL的改进下垂控制器设计简化的双电源并联结构如图4所示.其中等效线路上的电压损耗为(6)公式中:P、Q为DG输出的有功功率与无功功率;Ri为线路等效电阻;Xi为线路等效电抗;Ui为DG输出电压幅值,i=1,2.各DG无功出力是按照下垂控制曲线与线路特性曲线的交点决定的.当不改变无功下垂系数时,改变线路阻抗会影响无功分配情况.U0-nkQ=Upcc+ΔUi,(7)公式中:Upcc为公共节点PCC端电压.当DG的等效线路阻抗改变时,对应的无功也将发出相应的变化,(8)公式中:Q′为等效线路阻抗变化后的无功功率;为线路阻抗变化后的线路损耗.综上可认为,导致无功分配发生偏差的原因是等效线路不匹配部分的线路损耗造成的.因此,本文将采用补偿该部分电压的方式,来消除由于线路不匹配而造成的无功分配问题,如图5所示.图5 电压补偿后无功分配情况Unew=U0+ΔUline,(9)公式中:Unew为补偿后的电压值;ΔUline为线路不匹配部分的电压降.将公式(6)~公式(9)联立可得:(10)根据公式(10)可得本文所提出的改进下垂控制表达式为(11)综上所述,改进下垂控制仅与微源出力和逆变器出口端电压以及线路阻抗差值有关;即通过3.1节线路参数识别功能得到线路阻抗差值,即可实现无功均分.3.1 线路参数识别环节本文所采用的线路参数识别技术是基于二阶广义积分器(SOGI-FLL)[5,16]在公共点PCC端上电压及电流相量的处理.S0GI-FLL是提取电网中电压同步信号的一种应用广泛的算法,该算法具有快速实时跟踪信号的特点,其结构如图6所示.图6 SOGI-FLL框图SOGI的传递函数为(12)(13)上述SOGI-FLL也被应用于监测流入PCC端的电流相量.SOGI-FLL作为监测两个正交输出信号的选择性滤波器,能够准确地确定电网频率下的电压电流相量.利用各分布式电源到PCC端的线性关系,可以将DG到PCC等效为由线路阻抗Zg和端电压Vg而组成的简单的戴维南电路.由于交流电网的V-I特性不能用一个简单的二维笛卡尔坐标系表示,在特定频率下PCC端电压及电流相量的关系,如图7所示.使PCC运行在同一频率下的两个不同工作点,利用SOGI-FLL跟踪监测对应的电压和电流相量.即可得到相应的等效线路阻抗Zg,即(14)同时,利用如图8所示的FLL模块,用电压频率的积分计算角度θg,从而得到各馈线的等效线路电阻及电抗.图7 特定频率下PCC端电压电流关系图图8 线路参数识别框图图9 逆变器单元总体控制结构框图3.2 基于线路参数识别的改进下垂控制逆变器单元的总体控制结构的控制框图,如图9所示.它由几个控制回路组成,如下所述.线路参数识别环节、改进下垂控制环节及由电压电流双环控制的PWM脉冲调制环节.本文所提出的改进后下垂控制在于在传统下垂控制中加入了线路参数识别环节和补偿逆变器出口电压环节.修复了系统的输出电压,并在不添加任何通讯设备的情况下,有效的实现了调整各DG的无功出力,且基本达到均分.4 仿真结果本文在Matlab/Simulink中搭建了微电网仿真模型,以验证本文所提出控制策略的有效性,如图9所示.该模型为两个相同容量的DG单元,均按下垂控制方式运行.其中各DG单元的电路参数和控制参数,如表1所示.表1 各DG单元电路参数及控制参数参数名称数值参数名称数值直流母线电压/V220滤波器电感/μH1.5滤波器电容/μC30开关频率/Hz15微电网标准频率/Hz50kpu0.06kpi50Kip0.34.1 线路参数识别以DG1为关注对象,线路参数辨识结果如图10所示.经本文所述的线路参数识别环节得到的线路阻抗值为0.321+j0.242 Ω,其中得到的电阻与电感值与真实值分别相差1.3%和1.1%,由此可知本文所提方法对线路参数识别过程误差较小,且信号跟踪速度较快.图10 线路识别结果为进一步验证等效线路阻抗在发生变化时,该环节的准确性.将等效线路阻抗增大为初值的150%,得到线路参数识别结果如图11所示.采用线路参数识别环节得到的等效线路阻抗值为0.482+j0.363 Ω,其误差分别为1.3%和1.5%.由此可见在等效线路阻抗发生变化时,该方法仍能准确得到相应线路的阻抗值,且并不需要知道等效线路的初值.图11 线路变化后识别结果4.2 改进下垂控制策略验证在上述线路参数识别结果的基础上,利用本文所提的方法对DG单元的等效线路电压进行相应的补偿,并通过仿真来验证该方法的正确性.(1)仿真案例1两台同容量的DG单元并联运行在线路匹配时的无功分配情况,采用本文所提出的基于线路参数识别环节的改进下垂控制策略,其仿真结果如图12所示.图12(a)显示了两个微源的无功出力的分配情况,补偿前各DG单元输出的无功功率分别为450 Var和320 Var.补偿后DG1和DG2发出的无功偏差量接近于0.图12(b)显示了两个微源的有功出力的分配情况,由图12(b)所示,各DG输出有功功率均为3.2 kW.即本文提出的改进下垂控制策略在等效线路阻抗匹配情况下,可实现无功的均分.图12 仿真案例1结果图13 仿真案例2结果(2)仿真案例2两台相同容量的DG单元并联运行且线路不匹配时的无功分配情况,采用本文所提出的基于线路参数识别环节的改进下垂控制策略,其仿真结果如图13所示.图13(a)显示了两个微源的无功出力的分配情况,各DG单元输出的无功功率均为420 Var.图13(b)显示了两个微源的有功出力的分配情况,由图所示,各DG输出有功功率仍为3.2 kW.各微源输出的有功功率不受等效线路阻抗是否匹配的影响.且在线路参数不匹配情况下,通过本文提出的改进下垂控制仍可实现无功的均分.(3)仿真案例3测试等效线路阻抗发生改变的情况下,本文所提的改进下垂控制策略的有效性.当t=2.5 s时,等效线路阻抗增加到初值的150%,其仿真结果如图14所示.图14(a)显示了两个微源的无功出力的分配情况,各DG单元输出的无功功率仍为420 Var.图14(b)显示了两个微源的有功出力的分配情况,由图所示,各DG输出有功功率为3.2 kW.该情况下会影响传统的下垂控制无功分配情况,但本文提出的改进下垂控制策略使各微源无功出力重新分配,且基本达到均分.图14 仿真案例3结果(4)仿真案例4测试当负荷侧发生突变情况下,改进下垂控制策略的有效性.当t=2 s时,负荷侧需求有功功率增加1 300 W;负荷侧需求无功功率增加200 Var.当t=3.5 s时,负荷侧需求恢复到初始情况.该仿真结果如图15所示,其中图15(a)和图15(b)分别显示了各DG输出的有功功率及无功功率,且该方法仍能控制无功功率达到均分.图15 仿真案例4结果5 结论(1)微电网中,各并联运行的DG单元采用传统下垂控制时,造成无功功率不能均分的主要原因是连接各DG单元的等效线路阻抗不匹配.(2)本文提出的基于SOGI-FLL的改进下垂控制策略,实现了无需依赖通讯系统情况下对信号的实时跟踪,且对线路参数识别结果与实际值误差较小.(3)仿真结果表明,所提该方法基于该识别结果,可对各DG单元所连接的不匹配等效线路部分的电压进行补偿,从而实现无功功率的重新分配,且对PCC端电压影响较小,易于实现.参考文献【相关文献】[1] 王成山,肖朝霞,王守相.微网综合控制与分析[J].电力系统自动化,2008,32(7):98-103.[2] 杨新法,苏剑,吕志鹏,等.微电网技术综述[J].中国电机工程学报,2014,34(1):57-70.[3] 何大海,王茗萱,王建南,等.微电网并网同步控制策略研究[J].东北电力大学学报,2017,37(6):21-27.[4] K.D.Brabandere,B.Bolsens,J .V .D.Keybus,et al.A voltage and frequency droop control method for parallel inverters[J].IEEE Transactions on Power Electronics,2007,22(4):1107-1115.[5] J.C.Vasquez,J.M.Guerrero,A.Luna,et al.Adaptive droop control applied to voltage-source inverters operating in grid-connected and islanded modes[J].IEEE Transactions on Industrial Electronics,2009,56(10):4088-4096.[6] J.M.Guerrero,L.G .D.Vicuna,J.Matas,et al.Output impedance design of parallel-connected UPS inverters with wireless load-sharing control[J].IEEE Transactions on Industrial Electronics,2005,52(4):1126-1135.[7] 董杰,李领南,张纯江,等.微电网中的有功功率和无功功率均分控制[J].电力系统自动化,2016,40(10):90-96.[8] 周贤正,荣飞,吕志鹏,等.低压微电网采用坐标旋转的虚拟功率V/f下垂控制策略[J].电力系统自动化,2012,36(2):47-51.[9] 张明锐,杜志超,王少波.微网中下垂控制策略及参数选择研究[J].电工技术学报,2014,29(2):136-144.[10] 张东,卓放,师洪涛,等.基于下垂系数步长自适应的下垂控制策略[J].电力系统自动化,2014,38(24):20-25.[11] 李红萍,杨洪耕,曾巧燕,等.孤岛型微电网中改进下垂控制策略[J].电力系统及其自动化学报,2017,29(4):49-54.[12] 朱一昕,卓放,王丰,等.用于微电网无功均衡控制的虚拟阻抗优化方法[J].中国电机工程学报,2016,36(17):4552-4563.[13] 刘尧,林超,陈滔,等.基于自适应虚拟阻抗的交流微电网无功功率—电压控制策略[J].电力系统自动化,2017,41(5):16-21.[14] 吴翔宇,沈沉,赵敏,等.基于公共母线电压的微电网孤网运行下垂控制策略[J].电工技术学报,2015,30(24):135-141.[15] 李国庆,王星宇,王鹤.微电网中分布式电源逆变器数字多环反馈控制方法[J].东北电力大学学报,2014,34(1):39-46.[16] J.C.Vasquez,J.M.Guerrero,E.Gregorio,et al.Adaptive droop control applied todistributed generation inverters connected to the grid[C]//IEEE International Symposium on Industrial Electronics.IEEE,2008:2420-2425.[17] 邓哲,周峰武,侯尧杰,等.基于双输入SOGI-FLL的单相电网电压同步新算法[J].太阳能学报,2015,36(2):399-407.[18] 鲍陈磊,阮新波,王学华,等.基于PI调节器和电容电流反馈有源阻尼的LCL型并网逆变器闭环参数设计[J].中国电机工程学报,2012,32(25):133-142.[19] A.E.Leon,J .M.Mauricio,J.A.Solsona,et al.Adaptive control strategy for VSC-based systems under unbalanced network conditions[J].IEEE Transactions on Smart Grid,2010,1(3):311-319.[20] C.T.Lee,C.C.Chu,P.T.Cheng.A new droop control method for the autonomous operation of distributed energy resource interface converters[C]//Energy Conversion Congress and Exposition.IEEE,2010:702-709.[21] L.U.Xiaonan,S.Kai,L.Huang,et al.Improved droop control method in distributed energy storage systems for autonomous operation of AC microgrid[J].Automation of Electric Power Systems,2013,37(1):180-185.。
微电网群远程运维系统设计及实现摘要:微电网因其良好的间歇性能源消纳能力得到了快速发展,然而微电网多数地处偏远或海岛地区,如何运维成为一个困扰运行单位的难题。
本文以贵港市三里一中微电网群实施远程运维为例开展研究,设计了远程运维系统部署架构,开发微电网群远程运维系统软件,建立故障特征库与故障代码,并可在智能终端获取故障信息。
该系统通过采集机房、配电房的环境参数及微电网群的运行数据,归纳并分析微电网群运行控制系统故障记录及处理情况,实现微电网群运维关键状态数据监测,为运维人员提供检修准备及处理依据。
关键词:微电网群;远程运维系统;工程调试0 引言微电网解决了多类型分布式电源的并网问题,有效的利用分布式电源,并且可以独立运行。
随着微电网的发展,由局部范围内的多个微电网互相联结形成微网群,有利于微电网间的协调控制,提高整体运行稳定性和经济性。
微电网群具有控制实时性高、通信可靠性高等特点,并且通常要求无人值班,使得远程运维系统开发尤为重要[1]。
近年来,远程运维系统在电力行业中的应用已逐步成熟,如今,在国内外的电气市场上,已出现了针对各场所或设备的远程运维技术的应用,例如,在变电站、配电室、机房等场所中,或电机、继电保护装置等设备上,都有远程运维技术的出现[2~14]。
三里一中微电网群位于广西贵港市三里镇第一中学,该系统既是线路末端又属于偏远郊区,为了更好开展微电网运行与维护,提高当地供电服务水平、减少运维人员工作量,广西电网公司贵港供电局开展了远程运维系统建设研究工作,并开发了基于云平台的微电网群远程运维系统,具备实时数据展示、告警推送和定时运维的功能。
值班人员可实时监测机房内环境及各电气设备的数据:当某参数超出安全限值时,系统可发出警告;系统通过分析所监测的数据,可通知运维人员进行控制维护,亦可通过自动控制启动自动调节和处理的功能实现自动运维。
本文首先介绍了三里一中微电网群远程运维系统架构设计,包括功能需求、软硬件设计等,确定系统总体技术框架,接着介绍技术方案研究,确定相关设备选型要求,最后以实际工程调试案例作为说明,以下分别详述。
微电网中心控制器的研究欧郁强;余志文;闻建中;王利国;綦孝文;艾芊【摘要】介绍了微电网(MG)的发展现状和MG中心控制器(MGCC)研究意义。
分析了国内外MG的控制结构,突出了MGCC在MG控制中的重要地位。
分析了MGCC的内部功能模块,重点对各功能模块的职能进行了阐述。
介绍了国内外MGCC的协调控制方法,并比较了各控制方法的优缺点。
在此基础上,对MGCC的关键技术进行了探讨。
【期刊名称】《电器与能效管理技术》【年(卷),期】2015(000)002【总页数】7页(P42-48)【关键词】微电网中心控制器;集群;结构;协调控制策略;关键问题【作者】欧郁强;余志文;闻建中;王利国;綦孝文;艾芊【作者单位】;;;;;;【正文语种】中文【中图分类】TM7110 引言微电网(Micro Grid,MG)是一个独立可控系统[1-3],具有自治运行、多功能互补、优化管理和协调控制等特点,可实现对分布式电源(Distribution Gereration,DG)的有效利用[4-5]。
MG由DG、储能设备、负载等组成;采用较多电力电子元件,控制灵活且惯性小;配合内部各种储能、负荷调控等手段可有效控制DG电能的不确定性带来的影响[1-5]。
正常情况下,MG并网运行,其负荷功率缺额由电网提供,系统稳定性及电能质量靠主网支持。
当主网发生较大波动时,MG可脱离电网实现孤岛运行。
中长期及长期孤岛需要减切负载以保证电网稳定,使得MG的灵活性及供电可靠性降低,不能完全满足人们生产的需求。
电网架构的更新、DG的高效并网消纳和电能供应的高可靠性要求促进了MG的进一步发展[6-7]。
MG的多样性使得MG的相互支撑性成为可能,通过一定的连接方式可使得各MG之间进行功率交换,实现MG的集群。
MG集群运行可提高MG运行的灵活性,也可降低MG对主网的依赖性,同时也使得MG的主动孤岛运行成为可能[6-7]。
单一MG自治运行和MG集群运行靠MG控制实现。
电力行业组网方案目录1. 内容简述 (3)1.1 研究背景 (3)1.2 研究目的 (4)1.3 研究内容 (5)2. 电力行业组网概述 (6)2.1 组网原则 (8)2.2 组网要求 (8)2.3 组网类型 (9)3. 系统架构设计 (11)3.1 系统总体架构 (12)3.2 网络层次结构 (14)3.2.1 物理层 (14)3.2.2 数据链路层 (15)3.2.3 网络层 (16)3.2.4 运输层 (18)3.2.5 应用层 (19)4. 组网方案设计 (20)4.1 数据传输方案 (22)4.1.1 数据传输方式 (23)4.1.2 数据传输协议 (24)4.2 网络安全方案 (26)4.2.1 安全架构设计 (26)4.2.2 安全防护措施 (27)4.3 接入方案 (28)4.3.1 端口接入 (29)4.3.2 接入设备选型 (30)5. 设备选型与集成 (32)5.1 设备选型原则 (33)5.2 主要设备选型 (34)5.2.1 网络设备 (35)5.2.2 计算设备 (36)5.2.3 存储设备 (38)5.3 集成策略 (39)6. 系统运行维护 (40)6.1 运行监控方案 (41)6.2 故障处理流程 (42)6.3 维护规范 (43)7. 预算与实施计划 (45)7.1 项目预算 (46)7.2 实施计划 (46)8. 风险分析与控制 (47)8.1 技术风险分析 (47)8.2 运营风险分析 (49)8.3 风险控制措施 (50)1. 内容简述本文档旨在详细阐述电力行业组网方案的总体框架和具体实施策略。
方案涵盖了电力系统组网的必要性、技术路线选择、网络架构设计、安全防护措施以及实施方案部署等关键环节。
具体内容包括:电力行业组网背景及需求分析:介绍电力行业信息化发展趋势,探讨组网在提高电力系统运行效率、保障能源安全方面的重要性。
技术路线与网络架构:阐述组网方案所采用的技术路线,以及网络拓扑结构、信息传输协议等关键设计要素。
湘投云储0.72MW/2.1MWh离网光储柴一体化供电系统解决方案目录一、项目背景 (4)1.1微电网系统简介 (4)1.2巴布亚新几内亚光照资源 (4)1.3用户负荷情况 (4)1.4遵循标准 (4)二、系统方案 (6)2.1系统方案概述 (6)2.1.1离网光储供电系统简介 (6)2.1.2光储供电单元 (7)2.1.3系统设计相关参数 (7)2.2储能系统 (8)2.2.1系统要求 (8)2.2.1系统配置 (8)2.2.2系统布局 (9)2.2.3电池箱技术指标 (9)2.2.4光储一体供电单元组成指标 (10)2.2.5 安全保护策略 (10)2.2.6 电池模块 (11)2.3光伏发电系统(业主自备) (11)2.3.1光伏系统容量计算 (11)2.3.2光伏系统最大出力 (11)2.4电池管理系统 (12)2.4.1 BMS系统架构 (12)2.4.2电池管理单元BMU (13)2.5 高压箱 (13)2.6并/离网光储变流器 (14)2.6.1模块化光储一体机简介 (14)2.6.2光储一体机技术参数 (15)三、系统配置 (17)3.1光储微电网系统配置清单 (17)3.2集装箱配置 (17)3.3系统散热核算 (18)3.3.1电池仓 (18)3.3.2变流控制仓 (19)3.4消防系统 (19)3.5系统配置报价清单 (21)一、项目背景1.1微电网系统简介微电网是指将一定区域内分散的小型发电单元(分布式电源)、储能装置以及当地负荷组织起来形成的配用电系统。
他可以与常规电网并网运行,也可以独立运行。
孤岛微电网是指仅具备独立运行功能的微电网,例如:对电网未覆盖的偏远地区或者海岛供电的微电网。
1.2巴布亚新几内亚光照资源巴布尼亚新几内亚具有极为丰富的光照资源。
该国的大部分地区每天的日照时间约4.5小时至8小时。
在上世纪90年代,一份报告研究了巴布尼亚新几内亚的23个地区。
结果显示,莫尔斯比港是每一年日照时间最长的地区,长达2478小时,等效日超市场达5.7小时。
计及碳交易和新能源不确定性的多微电网合作运行优化策略摘要:日前,能源需求的日益增长,使得城市电网系统中的负荷不断加重,对供电的可靠性与稳定性要求。
作为消纳分布式能源最高效的方式之一,当发生大面积断电的情况时,能够在孤岛运行的微网可以发挥出巨大作用,同时微网能够更合理地利用自然资源,可以保障环保经济的能源供应,由此针对微电网的相关研究引起了国内外学者的广泛关注。
关键词:微电网;低碳运行;碳交易;纳什议价;交替方向乘子法;协同运行引言微电网的概念于2002年被美国电力可靠性技术解决方案协会(Consortiumfor Electric Reliability Technology Solutions,CERTS)提出。
微电网本质上是一个微型电网系统,内部包含了分布式电源、负荷以及储能等装置。
微电网中,电能的产生、消费以及储能等各环节比较复杂,有时内部会出现常规保护失灵的现象。
但是微电网系统对外表现出的特性是单一独立的,多数呈现电源或者负荷的特点。
对于大电网而言,微电网是单一可控单元,实现了即插即用。
1微网概念微网的定义最早是由CERTS提出,微网可以看作是由分布式电源、储能系统、变流器、保护装置和负载组成的发配电系统。
微电网以可再生的清洁能源发电为主,与各种其它类型能源兼顾,有效缓解了传统分布式可再生能源接入电网的困难,进而提升了资源效率。
同时,在电网供电发生异常时,微电网作为补充接入电网,可以保证用户供电的可靠性。
微电网包括交流微电网以及直流微电网两类。
交流微电网主要采用交流设备,兼容交流负荷,具有相当成熟的保护装置。
由于光伏等直流类型能源以及电动汽车等直流用电装置的使用率提高,越来越多的学者把目光投向了直流微电网。
由于缺少交直交变换的中间环节,直流微电网的结构更加简单,直流负荷供能更加灵活,减少电量损耗和成本,且不存在频率稳定性等问题。
2计及碳交易机制的多微电网协同运行架构计及碳交易机制的多微电网协同运行总体架构。
分布式能源与微电网技术摘要:在现代城市化进程加快发展下,能源需求量逐渐增长。
分布式能源和微电网技术能促进城市的绿色化和清洁能源的应用,达到节能减排的目的,也能为现代智能电网建设提供有效依据,保证电网的安全与稳定。
关键词:分布式;能源;微电网技术在中国经济快速提升下,工业化和城镇化进程加快发展,其存在的能源安全问题更为突出。
尤其是二氧化碳带来的全球变暖问题,引起社会的关注。
在该发展背景下,对城市的建设思想和发展模式有序转变,加大力度引进风力发电、太阳能发电模式等,促进整体的规模化发展。
一、分布式能源和微电网技术的研究意义第一,加强对分布式能源和微电网技术的研究,能确保清洁能源的有效应用。
基于太阳能、风能等多个形式清洁能源的应用,能保证能源的灵活接入和智能化控制,将其应用到智能终端进行消费,促使低碳城市建设目标的实现。
第二,加强对分布式能源和微电网技术的研究,也能提升总体的供电可靠性。
基于分布式发电的投入以及微网的统一管理,在先进系统和设备下,为电网运行提供强大保障,促使电能质量更可靠。
第三,分布式能源和微电网技术的研究,也能为其提供双向互动用电服务模式。
基于微网、智能家居和分布式发电,能为系统提供统一接口,维护用户和电网之间的相互沟通和交流,也能使用户获得新的体验。
加强对分布式能源和微电网技术的研究,将其作为智能电网建设中的主要部分,是新时期建设与发展下的主要模式,也承担者社会建设职责。
其中的分布式能源,在智能集成模式下,能保证接入系统的安全与可靠,也能确保微网更灵活。
所以,加强对分布式能源和微电网技术的应用,是城市绿色、清洁能源推动和应用的主要条件,在节能减排工作中,将其渗透到工作中,对电网的安全运行也具备十分重要的作用[1]。
二、分布式能源和微电网技术的关键(一)容量配置清洁能源具备明显的间歇式能源特点,受到天气情况影响较大,电能的输出波动大。
基于对分布式能源和微电网技术的应用,能够在各个单位组成模式下,对其容量有效配置,确保风能、太阳能相互应用,发电单位和储能单元之间也能互补。
第27卷㊀第9期2023年9月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.9Sep.2023㊀㊀㊀㊀㊀㊀全直流型船舶微电网多时间尺度综合能量管理周荔丹1,㊀张明珠1,㊀姚钢2,㊀于天佑2,㊀赵敏3(1.上海电力大学电气工程学院,上海200090;2.上海交通大学电子信息与电气工程学院,上海200240;3.上海交通大学船舶海洋与建筑工程学院,上海200240)摘㊀要:为了解决船舶微网在短期不同工况切换时功率波动大和长期运行经济性问题,采用多时间尺度分层控制的综合能量管理策略,在考虑船舶微网运行㊁负荷需求以及系统运行成本三者之间关系的基础上,对船舶微网系统进行了两层调控,其中针对短期运行下的负荷波动,采用基于规则的能量管理策略,通过对比所搭建的模型在不同模式以及不同运行工况下的仿真,结果表明当负荷处于短期波动时采用该策略能够在平抑功率波动的同时有效提高电能质量;长期运行下考虑可时移负荷对船舶运行经济性的影响,提出改进型的乌鸦搜索算法对燃料和储能电池总运行成本进行优化,通过算例分析表明:该算法考虑负荷时移性,不仅起到了削峰填谷的作用,而且相较于传统的乌鸦搜索算法经济性提高了4.4%㊂关键词:电能质量;功率平衡;全直流型船舶;综合能量管理;多时间尺度;基于规则;改进型乌鸦搜索算法DOI :10.15938/j.emc.2023.09.019中图分类号:U665.1文献标志码:A文章编号:1007-449X(2023)09-0180-13㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2022-11-08基金项目:国家自然科学基金(52077135)作者简介:周荔丹(1973 ),女,博士,副研究员,研究方向为电能质量分析与治理,动态无功补偿与有源滤波技术,综合能源管理;张明珠(1997 ),女,硕士研究生,研究方向为船舶能源管理系统;姚㊀钢(1977 ),男,博士,研究员,博士生导师,研究方向为柔性交流输电系统FACTS 技术,新能源并网接入技术,储能技术㊂通信作者:姚㊀钢Multi time scale integrated energy management of full DCmarine microgridZHOU Lidan 1,㊀ZHANG Mingzhu 1,㊀YAO Gang 2,㊀YU Tianyou 2,㊀ZHAO Min 3(1.School of Electrical Engineering,Shanghai University of Electric Power,Shanghai 200090,China;2.School of Electronic Information and Electrical Engineering,Shanghai Jiao Tong University,Shanghai 200240,China;3.School of Naval Architecture,Ocean &Civil Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)Abstract :In order to solve the problems of large power fluctuations and long-term operational economy in the switching of ship microgrids under different operating conditions in the short term,a comprehensive energy management strategy with multiple time scales and hierarchical control was adopted.Based on the consideration of the relationship between ship microgrid operation,load demand,and system operating costs,a two-layer regulation was carried out on the ship microgrid system.Among them,a rule-based en-ergy management strategy was adopted for short-term load fluctuations.By comparing the simulation re-sults of the built simulation model under different modes and operating conditions,it shows that this strat-egy can effectively suppress power fluctuations while improving power quality when the load is in short-term fluctuations;Considering the impact of time-varying load on the economic efficiency of ship opera-tion in long-term operation,an improved crow search algorithm was proposed to optimize the total operat-ing cost of fuel and energy storage batteries.Through example analysis,it is shown that considering thetime-varying load not only plays a role in peak shaving and valley filling,but also improves the economic efficiency by4.4%compared with traditional crow search algorithms.Keywords:power quality;power balance;full direct current ship;integrated energy management;multi time scale;based on rules;improved crow search algorithm0㊀引㊀言近年来,以综合电力推进系统为标志性技术特征的全直流型船舶,具有可靠性高㊁机动能力强以及维修成本低等优点而成为未来船舶的重要发展方向[1-2]㊂相较于传统微网,船舶微网无法在航行过程中与主网交换功率,且由于船舶运行工况处于不断变化的状态,以及叠加的各类航行环境随机变化等因素都会影响船舶运行的可靠性㊂为了保障船舶能够安全可靠运行,将作为能量缓冲设备的储能系统应用在船舶中[3],且相关船舶综合电力系统能量管理方面的研究内容,已引起了国内外大量学者的广泛关注[4-6]㊂电能质量管理方面:文献[7]提出了一种基于节点源荷差分电流的控制策略,在提高响应速度和精度的同时能够降低直流母线电压的波动;文献[8]提出了一种基于直流微网技术的新型能馈系统,能够实现系统源荷储之间功率的合理分配和减小直流母线电压的波动;文献[9]建立了一个集成混合储能系统的全电船舶模型,基于动态下垂控制方法有效改善了电能质量;文献[10]在短时间尺度场景中,在提高全电船舶电能质量的前提下平抑了功率波动;文献[11]提出了一种适用于多微电网互联的不同时间尺度阶梯控制方法,提高了并网的可靠性和安全性;文献[12]提出了一种基于模糊逻辑控制的能量管理系统,在稳定直流侧母线电压的基础上能够根据储能的荷电状态改变其充放电速率,提高了储能的使用寿命㊂多目标优化的长时间尺度下负荷经济调度方面:文献[13]提出一种实时模型预测控制能量管理策略,在减小母线电压波动和储能损耗的前提下能解决混合储能系统负载功率波动大的问题;文献[14]提出一种基于优化荷电状态反馈的混合储能能量管理策略,在平抑负载功率和直流波动的前提下延长了储能的使用寿命;文献[15]采用启发式和模型预测控制相结合的混合能量管理算法,能够实现功率的动态平衡;文献[16]提出一种考虑蓄电池寿命损耗的最优船舶储能系统经济调度模型,有效地减小了船舶负荷峰谷差和延长了储能设备的使用寿命,具有较高的经济性;文献[17]提出一种虚拟电阻电容下垂控制和二次荷电状态恢复控制方法用于船舶中压直流系统,有效地缓解了推进负荷和脉冲负荷动态变化引起的功率波动;文献[18]提出一种基于最小使用成本及储能状态平衡的孤岛直流微电网能量管理方法,能够在满足电压稳定和功率平衡的基础上,通过系统底层和顶层之间的协调控制,更好地完成整个系统的能量管理㊂由于上述电能质量管理和长时间尺度下负荷经济调度方面的文献没有进行综合能量管理㊂因此本文提出一种多时间尺度下分层控制的综合能量管理策略,将短期和长期两个时间尺度结合起来,分别提出相应的控制策略,最后通过仿真和算例验证所提策略在短期负荷波动下能够实现直流侧母线电压的稳定和供需功率的平衡,在长期运行下不仅提高船舶微网的经济性,还起到削峰填谷和平滑负荷曲线的作用㊂1㊀本文问题描述1.1㊀系统拓扑船舶微电网系统拓扑结构如图1所示,该系统由发电机㊁储能单元㊁各类变换器㊁推进器以及其他生活负荷共同构成,其中发电单元和储能单元两者共同作用通过输电线路为各类推进器及生活负荷提供电能㊂1.2㊀船舶运行模式柴电混合动力船舶的驱动动力源由柴油发电机和储能设备共同组成,其运行模式和运行工况种类较多,本文总共考虑了5种船舶运行工况,分别是启动并逐级加速㊁遇到障碍物转向后继续加速运行㊁到达安全区域后减速运行㊁悬浮前进以及低速前行㊂重点研究以下3种运行模式(具体的能量流动如图2所示)㊂1)发电机推进运行模式㊂该模式适用于当船舶处于低速前行等负载需求功率较小的运行工况,此时仅靠发电机的出力就可以满足系统的功率需求,储能如果未达上限则对其进行充电,否则其处于备用状态㊂181第9期周荔丹等:全直流型船舶微电网多时间尺度综合能量管理图1㊀船舶微电网系统拓扑结构Fig.1㊀Topological structure of ship microgrid system㊀㊀2)发电机和储能共同推进运行模式㊂该模式适用于当船舶处于加速或负载突增等运行工况,由于发电机的输出特性不能快速响应功率突变,此时应由发电机和储能两者共同作用来满足航行中负载功率的需求㊂3)主动减载模式㊂该模式适用于发生一些突发状况如果发电机的出力无法满足系统功率需求时,此时负荷若正常工作,将因功率不平衡导致直流母线电压出现较大幅度的下降,在仿真中可以根据负荷的重要程度切除一部分生活负荷以保证重要负荷的可靠供电㊂图2㊀船舶运行模式示意图Fig.2㊀Schematic diagram of ship operation mode1.3㊀船舶多时间尺度分层控制船舶系统结构较为复杂且设备种类繁多,其动态过程的时间跨度较大,包含微秒时间尺度下的开关器件换向过程㊁毫秒到秒短时间尺度下的电压稳定和功率实时平衡以及分钟到小时长时间尺度下的安全经济运行等等㊂由于不同时间尺度的复杂程度以及对控制实时性的要求都不同,因此针对该问题,本文从各时间尺度出发,提出了如图3所示的船舶多时间尺度分层控制结构㊂本文的研究重点即在该分层控制结构框架下,研究短期大功率推进器接入所带来的负荷功率骤增所带来的电压稳定和供需功率平衡问题以及长期运行下满足船舶可靠性和经济性的要求,搭建了以燃料费用和储能电池使用成本总运行费用最低的运行成本模型,并采取智能算法来迭代优化供电单元的出力㊂系统关于短期和长期的总体运行策略如图4所示㊂281电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图3㊀船舶多时间尺度分层控制结构Fig.3㊀Ship multi time scale hierarchical controlstructure图4㊀船舶能量管理总体运行策略Fig.4㊀Overall operation strategy of ship EMS2㊀船舶能量管理模型2.1㊀系统建模2.1.1㊀发电机模型船舶发电单元一般通过船舶微网将柴油机所产生的电能合理分配给各类负荷,以满足船舶用电的可靠性㊂对于传统柴油发电机的燃料成本模型[19],本文采用多项式来近似表示柴油能耗特性函数,其能耗特性F (t )=c 1P die (t )+c 2P dier (t )㊂(1)式中:P die (t )为t 时刻单台柴油发电机组输出的平均发电功率;P dier (t )为单台柴油机组的额定功率;c 1381第9期周荔丹等:全直流型船舶微电网多时间尺度综合能量管理和c2是多项式系数㊂本文取c1和c2为0.23和0.0575,则柴油发电机组的燃料成本C die(t)可表示为C die(t)=ð24t=1mF(t)㊂(2)式中m为柴油的价格㊂2.1.2㊀储能单元模型储能充放电模型如下:P b i=V b i I b i,B ch i P b iɤ0,B dis i P b iȡ0; SOC i=Q0-ʏt0I b i d t Q max; SOC i,minɤSOC iɤSOC i,max㊂üþýïïïïïï(3)式中:V b i㊁I b i为储能电池i的输出电压和输出电流; P b i为储能电池i的输出功率;B ch i㊁B dis i为储能电池i 的充放电状态;Q0㊁Q max为储能电池的初始容量和最大容量;SOC i为储能单元i的荷电状态,储能单元SOC的限制范围为0.4ɤSOCɤ0.9㊂2.1.3㊀负荷模型在船舶综合电力系统中,需求侧负载一般可分为以下三类[20]:刚性负荷㊁可时移负荷㊁可中断负荷㊂刚性负荷是维持船舶基本航行的负荷,这类负荷中断将会造成重大的设备损坏,产生很严重的影响,如推进负荷等;可时移负荷指的是短时重复使用的负载,如空调之类的负荷等;可中断负荷指的是偶尔短时使用的负载,如探照灯等之类的负荷㊂1)刚性负荷建模㊂在自然坐标系下对刚性负荷永磁同步电机进行建模,其磁链方程㊁转矩方程和推进功率方程[21]为:㊀㊀㊀ψs=L ss i s+ψf;(4)㊀㊀㊀T e=12p θ(i T sψs);(5)㊀㊀㊀P pr t=T eωm㊂(6)式中:i s为六相定子电流;ψs是六相定子磁链向量; L ss是六相定子电感矩阵;ψf是转子磁链矩阵;T e是电磁转矩(N㊃m);p是极对数;θ是转子位置角; P pr t(t)为t时刻的船舶推进功率;ωm是转子机械角速度(rad/s)㊂2)可时移负荷建模㊂可时移负荷的运行特点是功率不随时间而变化,通过将时间点进行转移,避开用电高峰期,可以提高长期航行的用电质量,其时移区间如图5所示㊂图中:T sh为可时移负荷移动的范围;T start sh和T end sh为可时移负荷移动的起始值;T a为可时移负荷运行的时间段㊂图5㊀可时移负荷时移区间Fig.5㊀Times shifting load time shifting interval可中断负荷与可时移负荷的特性较为类似,这里不再重复,可时移负荷建模如下:S sh(t)={0,1},tɪ[T s,T e];S sh(t)=0,t∉[T s,T e]㊂}(7)㊀㊀S sh(t)ȡT a[S sh(t+1)-S sh(t)],tɪ(T s-1,T end sh];(8) E sh=ðτ+T a t=τ+1P sh S sh(τ),τɪ[T s-1,T end sh]㊂(9)式中:S sh(t)表示负荷的状态,为1表示负荷处于运行中,为0表示设备未运行;P sh为可时移负荷的功率;E sh为可时移负荷的总功耗㊂2.2㊀系统协调控制2.2.1㊀永磁同步电机矢量控制六相永磁同步电机的控制策略采用i d=0的转子磁场定向矢量控制策略,该控制的优点在于控制方法简单易实现,可以避免转子永磁体退磁㊂基于矢量空间解耦理论得到六相电机的控制模型,模型中包含涉及能量转换的基波dq子空间和z1z2子空间㊂得到dq轴下的数学模型[21]为:u d=R s i d+L eqd i dd t-ωL eq i q+e d;u q=R s i q+L eqd i qd t+ωL eq i d+e q㊂üþýïïïï(10)式中:u d㊁u q㊁e d㊁e q分别为dq轴上的电压和感应电动势;R s为定子电阻;i d㊁i q分别为dq轴电流;L eq为等效电感;其中等效电感等于电机定子等效电感与变流器桥臂等效电感之和㊂由式(10)可知,u d不仅与i d㊁e d有关,还与i q存在耦合关系,同样u q也是如此,因此在仿真中可采用前馈解耦方法来控制,用来消除电机感应电动势扰动和i d㊁i q之间的耦合㊂同时对谐波电流采用PI 闭环控制来抑制z1-z2子空间的谐波分量在定子绕组产生的损耗,具体控制方程如下:481电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀u ∗d =(k p +k is )(i ∗d -i d )-ωL eq i q +e d ;u ∗q =(k p +k i s)(i ∗q -i q )+ωL eq i d +e q ;u ∗z 1=(k p1+k i1s)(i ∗z 1-i z 1);u ∗z 2=(k p1+k i1s)(i ∗z 2-i z 2)㊂üþýïïïïïïïïïï(11)式中:k p ㊁k i ㊁k p1㊁k i1分别为PI 控制的比例和积分系数;u ∗d ㊁u ∗q ㊁u ∗z 1㊁u ∗z 2分别为前馈解耦之后的dq 轴电压和PI 闭环控制之后的z 1-z 2空间的电压㊂其中,变流器采用转子磁链定向控制时满足e d =0,e q =ωψf㊂图6㊀六相PMSM 矢量空间解耦控制框图Fig.6㊀Block diagram of six phase PMSM vector spacedecoupling control六相PMSM 电流i abc 与i xyz 经过变换之后得到i d ㊁i q 与i z 1㊁i z 2(参见图6所示的矢量控制框图),由于采用的是中性点隔离结构,所以o 1-o 2子空间中的电气分量不予考虑㊂将得到的dq 轴电流再与速度环输出的电流给定量进行比较,然后经过PI 调节之后得到相应的dq 电压,最后经过矢量SVPWM 模块产生PWM 信号来驱动IGBT㊂2.2.2㊀储能单元控制储能单元采用双向DC /DC 变换器,当直流母线电压较低时其处于Boost 工作模式,为负荷供电;当直流母线电压较高时其处于Buck 工作模式,储存多余的电能来平抑负荷波动,其控制框图如图7所示㊂图中:U ∗dc为直流母线电压期望的额定值;U dc 为母线电压的实际值;i dcb 为变换器的输出电流;i Lb 为电感电流㊂2.2.3㊀负荷控制负荷包括刚性负荷㊁可中断负荷和可时移负荷,其中刚性负荷的控制策略见图6所示,后两种负荷只需要保证有稳定的电压,采用电压单闭环控制策略就可以实现,其控制结构如图8所示㊂图8中,U dcref 为负荷单元所期望的电压参考值;U l 为负荷电压的实际值㊂图7㊀储能单元及其控制框图Fig.7㊀Energy storage unit and its control blockdiagram图8㊀负荷控制框图Fig.8㊀Load control block diagram2.3㊀系统运行成本函数1)目标函数㊂以船舶微网系统的运行成本最低为目标函数,运行成本主要由燃料费用和储能电池使用成本组成,因此目标函数可表示为min C =ð24t =1[C die (t )+C bat (t )]㊂(12)储能单元的寿命主要取决于充放电深度和充放电循环次数㊂文献[16]提出储能设备寿命损耗成本为BTde=ðNi =1B inv unit E bL b,i (d b i ,P avgi );E b 为储能的容量;B inv unit 为储能的单位容量成本;L b,i (d b i ,P avgi )为储能的实际循环寿命㊂本文为方便分析,采用简化计算,设t 时刻储能的折旧成本为C bat (t )=|ΔW bat (t )|nC B2NQ B㊂(13)式中:N 为储能电池的循环使用寿命;C B 为单组储能电池的价格;n 为储能电池的个数;Q B 为储能电池581第9期周荔丹等:全直流型船舶微电网多时间尺度综合能量管理组的额定容量;ΔW bat(t)为t时刻储能电池的电量变化㊂2)约束条件㊂①系统功率平衡:P die(t)ʃP bat(t)=P load(t),∀tɪ[1,T]㊂(14)式中:P load(t)为t时刻负荷需求功率的总和;P bat(t)为t时刻储能电池的输出/吸收功率;T为一天24小时㊂②柴油发电机运行功率约束:0ɤP die(t)ɤP dier(t),∀tɪ[1,T]㊂(15)③储能电池电量约束:两相邻时刻间储能电池的电量约束为W bat(t)=W bat(t-1)+ΔW bat(t),∀tɪ[1,T]㊂(16)式中W bat(t)为t时刻储能电池的电量㊂储能电池存储和释放电量的上下限约束为:0ɤ|E ch i(t)|ɤE chmax i,∀tɪ[1,T];(17)0ɤ|E dis i(t)|ɤE dismax i,∀tɪ[1,T]㊂(18)式中:E ch i(t)㊁E dis i(t)分别为储能电池i在t时刻存储和释放的电量;E chmaxi㊁E dismax i分别为储能电池i存储和释放电量的最大值㊂④发电机推进运行模式功率约束:P die(t)=P load(t)-P bat(t),∀tɪ[1,T]㊂(19)⑤主动减载模式功率约束:P load(t)>P bat(t)+P die(t),∀tɪ[1,T]㊂(20) 3㊀模型分析与求解3.1㊀模型分析本文所提的分层控制结构涉及短期负荷波动下维持直流侧电能质量和系统功率平衡的仿真问题,另外还涉及长期运行下提高船舶微网系统日运行成本经济性的算例优化问题,因此拟采用结构分解的方法将本文所提的多时间尺度分层控制结构分为两层分别进行求解㊂3.2㊀模型分解本文将1.3节所提出的船舶多时间尺度分层控制结构分解为两部分,分别是采用基于规则的能量管理策略来解决短时间尺度下负荷大功率波动所带来的电能质量和功率平衡问题以及长时间尺度下采用改进型乌鸦搜索算法(crow search algorithm,CSA)对船舶微网系统的日运行成本进行优化㊂3.2.1㊀短期负荷波动下的能量管理在船舶行驶过程中,由于短期大功率推进器的突然接入将导致系统功率骤增,会对母线电压产生一个短时间的波动,此时如果某供电单元无法响应负荷突变可能会导致电能供应不足,因此有必要研究系统在短时间尺度下的控制策略㊂针对负荷的短期波动采用基于规则的能量管理策略㊂该策略是目前应用最为广泛的一种方式,具有设计简单,鲁棒性强,技术成熟等优点㊂该方法以推进电机负载转矩的变化来模拟系统处于不同的运行工况,并根据要实现的目标㊁系统当前的需求功率以及各设备的运行情况,来完成功率的分配㊂具体的规则如图9所示㊂图9㊀基于规则的功率控制流程图Fig.9㊀Power control flow chart based on rules 3.2.2㊀采用改进型CSA算法的模型求解针对船舶长期处于孤岛运行方式,在满足船舶供需能量平衡的基础上,基于船舶电力系统长期运行经济性的要求,采用改进型CSA算法对系统的运行成本函数进行优化㊂1)算法原理㊂CSA是一种基于种群间觅食行为的新型智能优化算法,主要通过从给定的求解空间中的所有可行解中找到满足约束条件的最优解,其寻优机制简单和可操作性强,但是该算法在解决复杂㊁非线性优化问题时容易处于局部最优状态,且收敛速度较慢㊂因此针对该算法的缺陷,本文提出一种改进型CSA 算法,并将其应用到船舶微电网系统中求解日运行成本最低的问题㊂681电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀①传统CSA 算法㊂在算法的每一次迭代中,个体i 会随机选择另一个个体j 进行跟踪,试图接近它的藏食之处m iter j ㊂在此可以将其分为以下两种情况:情况1:当认知概率AP 小于所生成的随机数r i时,说明个体j 并不知晓被跟踪,则最终个体i 会找到个体j 隐藏食物的地点;情况2:当认知概率AP 大于所生成的随机数r i时,说明个体j 已知被跟踪,为了使隐藏食物的地点不被发现,个体j 会随机飞往空间中的其他位置㊂上述两种情况下的位置更新公式如下:x iter +1i=x iteri+r i ˑf 1ˑ(miter j-x iter i),r i ȡAP ;a random position,otherwise㊂{(21)式中:xiter i为个体i 第iter 次迭代的位置;f 1为飞行长度;r i 为[0,1]之间均匀分布的随机数;m iter j 为个体j 隐藏食物的位置,AP 为认知概率㊂②基于改进型CSA 算法㊂为了使得算法的搜索空间更大,同时避免陷入局部最优的情况,本文采用改进型CSA 算法,相较于传统CSA 算法做了以下两点改进:(a)引入权重系数㊂引入权重系数来对个体的位置更新公式进行修正,借此拓宽个体的搜索空间,这样更有利于搜索到全局最优解,从而降低个体落入局部最优的概率,新的位置更新公式如下:xiter +1i=witerˑx iter i+r i ˑf 1ˑ(rg best -x iter i);(22)w iter =w max -(w max -w min )ˑiteriter max㊂(23)式中:rg best 为当前迭代过程中的最优解;w iter 为第iter 次迭代之后的惯性权重;iter max 为最大迭代次数;w min ㊁w max 分别为惯性权重系数的最小值和最大值㊂(b)引入随机扰动因子㊂当检测到个体位置停止更新时,说明算法可能已经陷入局部最优解(本文设置函数迭代到第150次时,陷入局部最优),此时为了个体能够跳出当前局部最优,引入随机扰动因子,使算法可以进入一个更好的寻优空间,从而找到全局最优解㊂具体计算公式如下:x iter +1i =x iter i+r i ,iter ȡ150㊂(24)改进型CSA 算法和传统CSA 算法对比而言,只有每次迭代的惯性权重系数是不一样的,其他的参数如最大迭代次数iter max ,种群数量N ,飞行长度f 1㊁认知概率AP 以及变量个数pd(指的是个体i 和个体j 两个变量)是初始化的时候就已经定义好的,两者是一样的㊂详细参数见表2所示㊂2)算法执行步骤㊂综上所述,本文采用的改进型CSA 算法具体执行步骤如下:①初始化各种可调参数,并针对所研究的问题来完成相应目标函数的定义;②初始化个体的位置及其记忆位置,且假设个体的初始位置为其记忆位置;③根据目标函数来计算个体记忆中的最佳位置;④判断算法是否陷入局部最优,如果是,则转到步骤⑤,如果否,将按照式(22)引入权重系数来对位置更新公式进行修正;⑤陷入局部最优时,按照式(24)引入随机扰动,使得算法可以跳出当前局部最优的状态;⑥重新计算个体的适应度函数,并更新相应的记忆位置和最优位置信息;⑦重复以上步骤③~⑥,直至达到设置的最大迭代次数时终止循环操作;⑧输出个体在更新过程中所搜索到的最优目标值㊂4㊀短时仿真与实验分析4.1㊀仿真参数本文针对图1船舶微电网拓扑结构图在MAT-LAB /Simulink 中搭建了相应的仿真模型,系统各个部分的参数如表1所示㊂表1㊀系统仿真模型参数Table 1㊀Parameters of system simulation model分类参数数值发电机组发电机750kW /1500r /min 各类负荷主推500~750kW /300r /min 侧推50kW /300r /min ˑ2上/下推15kW /300r /min 生活负载15~55kW 储能电池磷酸铁锂电池组560kW ˑ2电池额定电压459V 电池额定容量150Ah 电池最大充电电流70A 电池最大放电电流150A 直流母线直流侧电压1000V781第9期周荔丹等:全直流型船舶微电网多时间尺度综合能量管理4.2㊀仿真结果分析短时间尺度的仿真时间设置为4.2s,在该时间尺度下,将发电机推进运行模式和主动减载模式合并为模式一,相关的仿真结果如图10所示㊂图10(i)中的Δ|U|为电压的偏移率,计算不同曲线的电压最大偏移量和直流侧电压基准值两者之间的比值,这样就可得到不同曲线的电压偏移率㊂图10㊀系统处于模式一和模式二下的短期仿真结果图Fig.10㊀Short term simulation results of the system un-der mode one and mode two881电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图10(a)~图10(i)是系统处于不同模式下的仿真结果㊂在模式一储能单元处于空闲备用状态时,其中考虑到图10(a)模式一在1.8~2.4s 时间段内仅靠发电机的出力无法满足系统推进负荷和生活负荷的功率需求㊂通过仿真结果图10(i)可以看出在不进行任何操作且无储能的情况下,电压偏移率为3.5%,在无储能但进行减载操作之后,电压的偏移率下降到1.8%,此时若储能参与系统调节,则电压偏移率进一步降低到1.4%,最后在储能参与调节的基础上并加上基于规则的能量管理策略,电压偏移率仅为1.2%㊂通过以上对比,可以明显地看出在系统处于短时过负荷工况下,进行负荷减载操作或由储能提供超出发电机最大出力的那部分功率需求,都能有效地减小直流侧电压的波动,从而提高系统的稳定性㊂由上述仿真结果可以看出,系统在模式一和模式二不同工况下都能实现供需功率的平衡和直流侧电压的稳定㊂4.3㊀实验结果分析为了验证所提方法的有效性,本文搭建了如图11所示的实验平台㊂由于示波器探头数目有限,因此采用一根探头分别对不同模式不同工况下的直流侧母线电压波形进行观察㊂图11㊀实验平台Fig.11㊀Experimental system㊀㊀由于仿真时系统刚性负荷中推进电机的功率参数较大,实验时系统刚性负荷的参数和仿真有所区别,具体参数如表2所示㊂表2㊀系统刚性负荷的实验参数Table 2㊀Experimental parameters of system rigid load参数数值发电机主推侧推上/下推功率/kW 5050105极数12121212转速/(r /min)200200450450相直轴电感/mH 13.92611.14 6.9017.604相交轴电感/mH 13.92611.14 6.9017.604磁链/Wb0.54600.44990.13630.1639转动惯量/(kg㊃m 2)5.46062.65750.12090.0575㊀㊀当系统处于模式一无储能状态时,系统运行稳定后的直流侧母线电压实验波形如图12(a)所示,通过示波器可以读出,其电压偏移率分别为6.6%和9.4%;对比于图12(b)系统处于模式一有储能状态时直流侧母线电压的实验波形图可以看出,其电压偏移率分别由6.6%降为6.4%㊁9.4%降为6.3%;当系统处于模式二有储能且采用基于规则的能量管理策略时,系统运行稳定后的直流侧母线电压实验波形如图12(c)所示,通过示波器可以读出,其电压偏移率进一步下降为4.2%和3.5%㊂实验时不同模式不同工况下直流侧母线电压的偏移率对981第9期周荔丹等:全直流型船舶微电网多时间尺度综合能量管理。
某驻地海岛型微电网项目典型案例初设方案(风、光、柴、储)目录一、项目背景 ................................................................................................................................ - 1 -二、整体建设方案 ........................................................................................................................ - 2 -2.1光伏发电系统 (4)2.1.1 组件倾角设计................................................................................................................... - 4 -2.1.2 太阳能电池阵列设计....................................................................................................... - 4 -2.1.3 太阳能光伏方阵直流防雷汇流箱设计 ......................................................................... - 6 -2.1.4 直流配电柜设计............................................................................................................... - 7 -2.1.5 太阳能光伏并网逆变器的选择....................................................................................... - 8 -2.1.6 光伏系统防雷接地装置................................................................................................. - 10 -2.1.7 光伏施工组织设计........................................................................................................ - 11 -2.2风力发电系统 . (12)2.2.1 风力发电系统描述......................................................................................................... - 12 -2.2.2 风机主体选型................................................................................................................. - 13 -2.2.3 风机技术参数表........................................................................................................... - 14 -2.2.4 风机逆变器技术设计..................................................................................................... - 15 -2.2.5 风机控制器功能设计..................................................................................................... - 16 -2.2.6 风机防雷设计................................................................................................................. - 19 -2.2.7地面风机的安装选型...................................................................................................... - 19 -2.3柴油机供电系统 (22)2.3.1柴油机的基本参数.......................................................................................................... - 22 -2.3.2 柴油机的基本参数......................................................................................................... - 22 -2.4储能系统 (23)2.4.1储能系统总体描述.......................................................................................................... - 23 -2.4.2 100kW双向智能控制成套装置(PCS) ............................................................................ - 27 -2.4.3 储能监控......................................................................................................................... - 33 -2.5微电网控制管理中心 . (34)2.5.1微电网控制管理中心系统概述...................................................................................... - 34 -一、项目背景微电网是指将一定区域内分散的小型发电单元(分布式电源)、储能装置以及当地负荷组织起来形成的配用电系统。
电网知识点总结第一章电网基础知识1.1 电网的概念与作用电网是由输电线路、变电设备、发电设备等组成的系统,用于输送、分配和调节电力,实现电力的生产、输送、分配、消耗的有机整体。
电网的主要作用是实现电力的长距离传输、多源多地区供电、电力的高效利用和经济运行。
1.2 电网的组成电网由输电线路、变电设备、发电设备、调度设备、保护设备等组成。
输电线路包括输电塔、绝缘子、导线等,变电设备包括变压器、开关设备等,发电设备包括发电机、发电机组等。
1.3 电网的分类根据电网的规模和功能划分,电网可分为超高压交流电网、特高压直流电网、城市供电网、农村供电网等。
根据电网的运行和组织形式划分,电网可分为区域电网、地区电网、配电网等。
1.4 电网的运行方式电网的运行方式包括开环运行和闭环运行两种。
开环运行是指电力系统通过直接并联和串联方式进行运行,闭环运行是指通过变压器、换流器等设备进行运行。
1.5 电网的特点电网具有电力传输距离长、负载变化大、频率和电压要求高、安全可靠性要求高等特点。
第二章电网技术知识2.1 输电线路输电线路是连接发电厂和用户的电力线路。
根据输电距离和电压等级的不同,输电线路可以分为220kV及以下的中压输电线路和500kV以上的高压输电线路。
根据导线类型和结构形式的不同,输电线路可以分为架空线路和电缆线路。
2.2 变电设备变电设备用于变换电力系统的电压等特性。
主要包括变压器、断路器、隔离开关和接地开关等。
变压器是变换电压的主要设备,断路器用于断开和接通电路,隔离开关和接地开关用于隔离和接地故障电路。
2.3 发电设备发电设备用于将其他形式的能量转换为电能。
主要包括发电机、燃气轮机、水轮发电机等。
2.4 调度设备调度设备是用于对电网进行监控和调度的设备,主要包括调度自动化系统、防护自动化系统、监控自动化系统等。
2.5 保护设备保护设备用于保护电力系统设备和人员安全,主要包括继电器、保护装置等。
2.6 电网的运行管理电网的运行管理包括电力生产、输电、配电等方面的运行及调度管理。