超声导盲仪
- 格式:docx
- 大小:21.10 KB
- 文档页数:3
超声波导盲手杖障碍检测系统的设计与研究摘要:中国是世界上盲人最多的国家,视力受限这一缺陷严重影响着他们的日常生活。
随着科技的进步,超声波探测技术得到迅猛发展。
为了帮助他们克服障碍,出行方便,本文设计了一种智能导盲手杖——超声波障碍检测系统,引导盲人及时避开障碍物,保障盲人的生命安全。
该系统主要包括单片机系统、显示电路及超声波发射接收电路三部分,借助Mutisim软件和编程语言C进行仿真实验。
关键词:超声波探测技术障碍检测系统单片机1.研究背景与意义据国家权威部门统计,中国的盲人数量约有500万,占全世界盲人口的18%。
盲人是社会人群中的单一群体,遭遇着普通人无法想象的困难与挫败。
传统的木制手杖质量较重,不利于盲人的携带;导盲犬,训练时间长,条件需求高,价格高达20-30万,对于生活不富裕的盲人家庭来说,显然无法承担如此昂贵的费用。
即使目前较多导盲产品均融入了电子技术,但仍无法从根本上彻底解决盲人出行的难题。
若能有一种可以及时帮助盲人避开障碍物的智能导盲手杖,可为盲人朋友带来极大的方便。
超声波探测系统是利用超声波在介质中的传播特性实现的非接触式距离探测,具有高性价比、结构简单、成本低廉、适应性强、不容易损坏等优点。
近年来,随着科学技术的快速发展,超声波传感器作为一种新型的工具在各个领域都得到了广阔的发展,将超声波检测技术应用于导盲手杖,有着广阔的市场前景。
2.超声波导盲产品现状世界上已经成功研制的超声波导盲装置主要可以有四类:电子技术类导盲仪、可移动的导盲机器人、可穿戴式导盲仪和智能导盲手杖。
(1)电子技术类导盲仪电子技术类导盲仪的工作原理与超声波雷达系统相似,均是依据超声波发射后,撞击障碍物后被反弹回来的时间、强弱判断障碍物的所在。
该导盲仪的主要缺点是准确性相对较差,消耗时间过长。
(2)可移动的导盲机器人导盲机器人往往是预先设定路线,准确判断障碍物的所在,对于一些突发事件,可能无法准确判断,存在一定的安全隐患。
超声波智能导盲杖的设计孙二杰;汪东军;石震;李伟【摘要】我国盲人及视觉障碍者数量众多, 行动不便, 该导盲杖的设计有助于他们较好的识别路况, 给日常生活带来极大的方便. 该导盲杖利用超声波来探测周围的环境信息, 并将环境信息以其他的形式反馈给使用者, 同时该导盲杖能以声光报警的形式提醒路人及时避让. 相比传统的导盲杖该导盲杖具有精度高、使用便捷、成本低及功能齐全等特点同时还能实现温度语音播报功能.%There are large numbers of blind people in our country who cannot move around freely. The designation of the guide-stick can help them have a better recognition of the road, so this will bring great convenience to their daily life. The guide-stick can detect the surrounding information and feedback to the users in other forms, when there are obstacles in front of the users it can warn them in the form of light and sound and at the same time it can remind the passers-by away from the users. Compared to conventional guide-stick, this guide-stick with high precision, ease of use, low cost and fully functional characteristics and at the same time it can broadcast the temperature with voice.【期刊名称】《计算机系统应用》【年(卷),期】2015(024)008【总页数】4页(P273-276)【关键词】超声波;温度补偿;照度;声光报警;导盲杖【作者】孙二杰;汪东军;石震;李伟【作者单位】山东建筑大学信息与电气工程学院,济南 250101;国网山东节能服务有限公司,济南 250101;山东建筑大学信息与电气工程学院,济南 250101;山东建筑大学信息与电气工程学院,济南 250101【正文语种】中文盲人行走时通常使用普通的手杖, 通过在地上不断的敲击, 获得大致的路况及前方小范围内有无障碍物. 但它不能发现较远一点的障碍物, 同时也不具备提醒路人避让的功能. 随着电子技术的发展, 人类对电子产品的需求越来越多, 然而超声波导盲杖在市面上还很罕见, 与实际需求相差甚远. 经调查发现现有的导盲仪价格偏高, 不易被普通人所接受, 所以如何解决好价格与性能之间的问题是开拓市场的关键.系统总体框图如图1所示, 超声波导盲杖主要由超声波探头、单片机、温度补偿电路、照度检测电路、语音播报电路、声光报警电路组成. 该装置有两个按钮, 一个电源开关, 一个温度播报开关, 当不使用时关闭电源开关, 节省电能, 当使用者按下另一个开关, 则通过语音播报当时的温度值, 方便使用者了解当时的温度情况. 该导盲杖下端及中部分别放置一个超声波模块, 下端的模块主要用于检测低矮及形状不规则的障碍物, 中部主要检测相对高一点的障碍物, 当障碍物进入探测范围后进行声光报警, 随着距离的改变点亮的LED数目及蜂鸣器的频率会相应的改变. 上下两超声波相结合使测量结果更可靠, 大大提高使用者躲避障碍物的能力.本设计以ATMega 16单片机作为中心控制器, 利用超声波回声测距的原理测距[1], 同时为了避免模拟温度信号受电磁干扰的影响, 本设计采用新一代数字温度传感器SHT10测量温度, 对系统进行温度补偿, 提高测距精度及系统性能, 同时利用语音芯片ISD1420对温度进行播报; 当使用者靠近障碍物时如果照度大于50lx, 则只进行声报警, 如果照度小于50lx则进行声光报警, 同时点亮的LED数目与蜂鸣器的尖锐程度随着距离的改变而改变.3.1超声波发射及接收电路超声波发射电路主要由74HC04、BD681及超声波发生器组成, 如图2所示, 由于路上障碍物多种多样, 形状也不尽相同, 影响超声波的反射, 所以要增大发射功率. 74HC04中每一路反相器的带负载能力有限, 而将三路并联电阻减小、电流增大, 带负载能力增强; BD681是一个NPN达林顿晶体管, 进行功率放大. 由单片机定时器1产生40KHZ的方波信号通过功率放大电路驱动超声波发送器[2]. 超声波发射电路如图2所示.超声波接收电路采用CX20106A, 该芯片内含解调电路、前置放大电路等几部分电路, 该芯片体积小同时接收角度宽、价格便宜.接收的信号由1脚输入, 内部放大然后再经限幅放大器后变为矩形脉冲, 滤波器滤除干扰信号, 检波器滤掉载波检出指令信号, 最后整形由7脚输出. 当接收信号与CX20106A中心频率相符时, 7脚输出低电平, 否则为高电平. 超声波接收电路如图3所示.3.2温度及照度测量电路选用SHT10作为测温芯片, 该芯片内含14位A/D转换器同时支持串行通信, 输出完全标定的数字信号, 该芯片响应迅速、抗干扰能力强、测量精度高. 温度测量电路如图4所示.本设计为了减小电路板体积, 采用数字型芯片BH1750作为照度采集模块, 支持IIC 通信, 精度高,直接输出对应亮度的数字值. 照度测量电路如图5所示.3.3 温度语音播报电路采用ISD1420进行语音录放. ISD1420是采用模拟存储技术集成的, 可反复录放的20秒语音芯片, 掉电语音不丢失, 最大可分160段, 每段语音都可由地址线控制输出, 每小段语音长度为125ms.3.3.1分段录音的实现ISD1420分段录音可通过软件或硬件实现. 图6为实现录放的电路图, 单片机的PA 口连接ISD1420的地址端, PB0连接PLAYL端, PB1连接REC端. 当录音结束、存储器溢出或放音结束后, D2熄灭.3.3.2放音的实现在硬件电路中通过放音控制键实现, 如PLAYE和PLAYL键. 本系统通过软件实现放音, 录音完毕后, 读取采集的温度值进行报温. 为了清楚听见报温声音, 选用LM386作为音频放大器, 来对微弱音频信号进行放大.3.4 声光报警电路普通的导盲杖只有声音报警, 但当光线不好时路人很难发现他们的存在, 不能及时避让, 从而很容易发生事故. 因此本设计在导盲杖上安装8个红色LED, 采用声光相结合的报警方式, 如图7所示. 当障碍物进入报警范围且照度大于50lx时, 只驱动蜂鸣器, 进行声报警, 如果障碍物进入报警范围且照度小于50lx时进行声光报警;当障碍物离底部超声波探测器0.5m或中部超声波探测器1.5m内后开始报警[3], 同时设置不同的报警级别, 离障碍物越近, 蜂鸣器越尖锐, 点亮的LED数目越多.软件设计主要由主程序、超声波发生子程序、接收中断子程序、温度补偿子程序、语音播报子程序及声光报警子程序等组成,都是由mega16单片机完成.首先系统进行初始化, 包括端口状态、寄存器状态、定时器初值、报警阈值等, 然后单片机发送8个40KHZ的方波, 定时器开始计时, 为了防止干扰, 延时100us打开外部中断, 看是否有回波, 如果有则停止计数, 计算时间差[4], 测量温度, 对声速进行温度补偿, 最后测出障碍物的距离, 如果进入报警范围则根据程序的预设进行报警, 根据距离的不同驱动蜂鸣器发出不同频率的声音, 点亮不同数目的LED, 再重新测距; 如果没有回波则重新测距. 主程序流程图如图8所示.4.1 超声波发射接收子程序如图9所示, 此次设计用单片机控制超声波的发射, 通过定时器发射8个40KHZ的方波, 同时计数器开始计数, 延时100us防止回波的干扰, 碰到障碍物反射后, 回波经CX20106A处理后在7脚出一低电平, 触发单片机的外部中断, 停止计时.4.2 温度补偿和声速计算子程序在本系统中,稳定准确的超声波传播速度是测量精度高低的决定性因素. 而超声波在空气中传播时,其速度受到温度、粉尘、湿度、大气压、等因素的影响.其中温度的影响最大,超声波在空气中的速度与温度的关系表达式为,由泰勒公式将其展开,可得到近似计算公式为C=331.5 + 0. 607 T, 式中T是环境温度, 温度每变化1℃声波的速度变化0. 6m/s. 温度测量子程序流程图如图10所示.5.1 数据测试利用以上的设计在25℃下进行测量, 测量结果如表1所示,对所测量数据进行记录分析, 可知该超声波最大量程为5m.5.2 误差分析由实际测量结果分析可知, 在(100—300)mm范围内误差相对较大, 在6%左右; 在(300—3000)mm范围内测量精度比较高, 误差在1.2%—1.8%之间; 在(3000—5000)mm范围内误差又有所提高在2%左右.如上所述, 在(100—300)mm范围内误差相对较大, 主要是因为发射和接收的摆放位置及两者之间的距离有关, 会存在一定的盲区; 在(300—3000)mm范围内排除了盲区的干扰同时距离不算太远, 测量精度比较高; 在(3000—5000)mm范围内误差又增大, 主要是因为空气成分变化、超声波传播途中温度梯度变化导致测温不准, 同时距离较远发射功率不够大, 回波幅值衰减严重, 使远距离回波很难被检测到[5]. 再一个就是被测物体和超声波传感器发射端接收端三者之间存在一个几何角度, 也就是说反射波入射到接收端的角度不是垂直的, 这样所测距离就不是垂直距离, 会造成一定的测量误差.1 Websser D. A pulsed ultrasonic distance measurement system basedupon phase digitizing. IEEE Trans. on Instrumentation and Measurement, 1991, (13): 2–4.2 郭天祥.新概念51单片机C语言教程.第2版.北京:电子工业出版社,2008.3 高飞燕.基于单片机的超声波测距系统的设计.信息技术,2005,(7):43–45.4 Lacey G, Dawson-Howe KM. The application of robotics to a mobility aid for the elderly blind. Elsevier Science Robotics and Autonomous Systems, 1998, (23): 27–30.5 林书玉.超声换能器的原理及设计.北京:北京科学出版社,2004.。
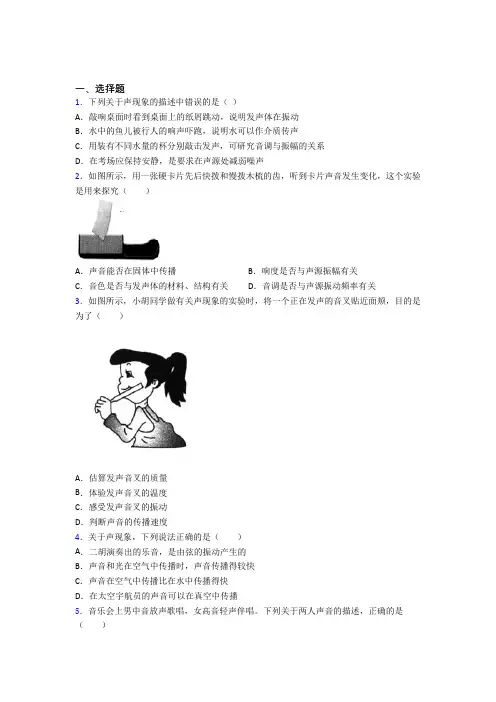
一、选择题1.下列关于声现象的描述中错误的是()A.敲响桌面时看到桌面上的纸屑跳动,说明发声体在振动B.水中的鱼儿被行人的响声吓跑,说明水可以作介质传声C.用装有不同水量的杯分别敲击发声,可研究音调与振幅的关系D.在考场应保持安静,是要求在声源处减弱噪声2.如图所示,用一张硬卡片先后快拨和慢拨木梳的齿,听到卡片声音发生变化,这个实验是用来探究()A.声音能否在固体中传播B.响度是否与声源振幅有关C.音色是否与发声体的材料、结构有关D.音调是否与声源振动频率有关3.如图所示,小胡同学做有关声现象的实验时,将一个正在发声的音叉贴近面颊,目的是为了()A.估算发声音叉的质量B.体验发声音叉的温度C.感受发声音叉的振动D.判断声音的传播速度4.关于声现象,下列说法正确的是()A.二胡演奏出的乐音,是由弦的振动产生的B.声音和光在空气中传播时,声音传播得较快C.声音在空气中传播比在水中传播得快D.在太空宇航员的声音可以在真空中传播5.音乐会上男中音放声歌唱,女高音轻声伴唱。
下列关于两人声音的描述,正确的是()A.男中音比女高音音调低、响度大B.男中音比女高音音调低、响度小C.男中音比女高音音调高、响度大D.男中音比女高音音调高、响度小6.下列事例中不是利用声波能传递信息的是()A.医生通过听诊器给病人诊病B.盲人利用超声波导盲仪探测前进道路上的障碍物C.接收次声波等信息判断地震的方位D.利用超声波排除人体内的结石7.下列有关声音的说法中正确的是()A.固体、液体、气体都能传播声音B.声音在固体、液体中比在空气中传播得慢些C.物体振动得越快,发出的音调就越低D.只要物体振动,就一定能听到声音8.下列实例,利用声传递能量的是()A.利用超声给金属工件探伤B.医生通过听诊器给病人诊病C.利用超声波除去人体内的结石D.超声导盲仪帮助盲人出行9.下列说法错误的是()A.图甲,敲击音叉后,将音叉轻轻地接触脸颊,能说明发声体都在振动B.图乙是电影院墙壁的一部分,其中的小孔可以减少回声所产生的干扰C.图丙是示波器上某声音的波形,从物理学角度看,它是噪声D.图丁是用超声测位仪测量海深,说明声可以传递信息10.下列语句中,所表达的物理含义是指声音的响度的是()A.悦耳动听B.余音绕梁C.震耳欲聋D.尖厉刺耳11.如图是小丁同学用小提琴在为大家演奏“高山流水”的曲目,她在演奏中不断地按压琴弦的不同位置,其主要是为了()A.改变琴声的响度B.改变琴声的音色C.改变琴声的音调D.改变琴声传播的速度12.关于声现象下列说法错误的是()A.诗句“不敢高声语,恐惊天上人”中的“高”是指声音的音调高B.超声波、声音、次声波在15℃的空气中传播的速度都是340 m/sC.利用超声波探伤仪可以检测出锅炉有没有裂纹,说明声可以传递信息D.“引吭高歌”和“低声细语”中的“高”“低”描述的是声音的响度二、填空题13.某种昆虫靠翅的振动发声.如果这种昆虫的翅膀在2s内振动了600次,频率是____Hz,人类______听到该频率的声音(填“能”或“不能”).14.音乐会的声音我们听起来有丰富的立体感,这主要是由于人的听觉有______效应。
电子导盲仪
在现实生活中,大多数盲人都是通过普通的盲杖来辅助行走的,一般为一根普通的长杆,只能探测局部的障碍物,存在很多不足。
导盲犬虽然可以协助盲人,但是存在训练周期和适应期过长,成本较高,所以使用率不高。
现有的电子导盲仪:
1.超声波导盲仪:行进的速度慢,只能进行局部障碍识别,不能探测出凹坑,
传播也会受到衍射、散射、吸收等影响。
2.移动式机器人:智能化程度高,但机构过于复杂,受地形限制,硬件开发成
本高。
3.穿戴式导盲仪:直接穿在身上进行语音提示,但重量重,缺乏安全感。
4.导引式手杖:下端有可移动装置弥补以上三种的缺点,但体积大、不便于携
带,成本较高。
因此电子导盲仪应多功能化:识别红绿灯、盲道、斑马线。
通过GPS定位和GPRS向盲人提示当前所在的位置。
识别人类声音等。
超声波导盲器的设计1 引言盲人在独自行走时主要依靠导盲装置。
最简单常用的装置是普通的手杖,用它在地面上敲击,可帮助盲人发现0.5米以内的障碍物。
它的主要缺点是不能发现较远一点的障碍物以及空中突出的障碍物。
例如,在相当于头部、胸的位置悬挂或突出的物体。
另外,盲人还可以利用导盲犬带路,但是不易训练且成本较高。
为了更好的帮助盲人行走, 许多国家都研究和生产了各种电子导盲装置,但大多成本较高,如各类导盲机器人及其它电子装置。
本文提出了一种用单片机开发的超声波导盲装置的设计方案,它具有低成本、实用和精确的特点。
2 导盲装置的功能设计及系统组成导盲装置主要由超声波探头、单片机以及测控及处理电路、按键、蜂鸣器等组成,可以放在包中,或安装在帽子上、手杖中。
导盲装置有三个按钮,分别是电源开关、远距、近距控制按钮,还有一个音量调节旋纽。
该装置使用电池,电源开关可控制系统通、断电,不用的时候关掉电源,节省电能。
使用时,超声波探头方向指向探测方向,当前方有障碍物时,在一定距离内喇叭会发出报警声并随着向障碍物的接近频率逐渐升高,起到提示作用。
远距、近距、控制按钮可用来控制报警的距离,通电时初始报警距离为2米,按远距控制按钮可将初始报警距离设为5米,按近距控制按钮可将初始报警距离设为1米,报警声音音量可用音量调节旋纽调节,有耳机插孔,可以接耳机。
该装置是以AT89C51单片机作为控制器,利用超声波回声测距的原理测距,用蜂鸣器进行声音报警。
系统的硬件结构框图如图1所示。
该系统主要由单片机控制系统、超声波发射电路、接收放大电路、按键控制和声音报警电路。
AT89C51单片机是整个系统的核心部件,用来控制、协调各部件的工作。
工作时先由单片机控制的振荡源产生40K Hz频率的信号以驱动超声波传感器,使它发射脉冲。
当第一个超声波脉冲发射后,计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,计算出从发射到接收的时间差Δt,最终利用单片机计算出距障碍物的距离,并根据远距、近距控制按钮设定的测距值进行报警指示。
声音的利用1.声音能够传递信息。
人们说话进行交流,医生用听诊器查病,敲击铁轨判断故障等,都是声音传递信息的例子。
2.声音可以传递能量。
飞机起飞时,旁边建筑物玻璃被振响、爆炸声震碎玻璃、雪山中不能高声说话、超声波碎石机振碎人体内结石等现象,都说明声音在传播过程中伴随着能量传播。
声的利用是声现象的主要内容,同样也是声现象重要内容,声的利用和生活联系紧密。
在中考题中,声的利用有关问题出现频率也较高。
在声的利用考题中,主要考察方向是声音传递信息、声音传递能量两个方面。
1.在声音传递信息方面,出现频率较高的内容有:B超利用B型超声遇到障碍物反射回来成像原理,利用声音反射测距,听诊器利用声音信号诊病,蝙蝠利用超声辨别物体和障碍物,倒车雷达利用超声测距,听声辨识人或物,利用超声波探伤等。
2.在声音传递能量方面,出现频率较高的考题内容有:利用超声波碎石为病人治病,利用超声波清洗牙齿污物,利用超声波清洗首饰,爆炸声震碎玻璃、雪山中不能高声说话等。
3.在有关声现象考题中,出现声音传递信息和能量的题目出现也较多,但以此考点作为单独一个题目的不多,更多的是与声现象其他考点结合。
只要考生熟悉以上常见现即可很好地回答对此知识点的考查。
~2分之间(一般出现一两个相关知识点)。
无论是哪类题型,声的利用考题一般与社会生活和实践相结合,平时多积累生活知识对于解答此类问题大有益处。
5.考点分类:考点分类见下表★考点一:声音传递信息◆典例一:(2016•某某)关于声现象说法正确的是()。
A.利用超声波排除人体内的结石是利用声波传递信息;B.调节小提琴琴弦的松紧程度主要目的是改变音色;C.房间窗户安装双层玻璃是在声源处减弱噪声;【解析】利用超声波排除人体内的结石是利用超声波的能量大,故A错;调节小提琴琴弦的松紧程度会改变小提琴振动频率,即音调,不是音色,故B错;房间窗户安装双层玻璃是防止噪声传入房间,是在传播过程中减弱噪声,不是在声源处,故C错。
牵引式导盲机器人的设计与实现张青宗;董丽梅;李秉超;梁军武;苏越;刘广桥【摘要】牵引式半自动导盲机器人是专门为盲人设计的一种服务型机器人,主要用于城市盲道避障.通过GPS导航仪、超声波传感器、红外传感器、远程视频交互系统与PLC控制器组成驱动控制系统,由一个万向轮和电机完成转向,由语音播报系统告诉盲人路线和路况.从机器人性能要求的角度出发,最终确定了方形轮驱结构.实验结果表明:导盲机器人性能可控性高、安全系数高,运用方便灵活.【期刊名称】《甘肃高师学报》【年(卷),期】2019(024)002【总页数】4页(P44-47)【关键词】导盲机器人;传感避障;GPS导航仪;语音播报;视频交互【作者】张青宗;董丽梅;李秉超;梁军武;苏越;刘广桥【作者单位】兰州城市学院培黎石油工程学院,甘肃兰州730070;兰州城市学院培黎石油工程学院,甘肃兰州730070;兰州城市学院培黎石油工程学院,甘肃兰州730070;兰州城市学院培黎石油工程学院,甘肃兰州730070;兰州城市学院培黎石油工程学院,甘肃兰州730070;兰州城市学院培黎石油工程学院,甘肃兰州730070【正文语种】中文【中图分类】TP242.3由于我国人口基数大,所以是世界上盲人最多的国家,约有500万盲人,占全世界盲人总数的18%,数据显示,我国每年约有45万人失明,照这种趋势继续保持不变,到2020年预期我国盲人总数将增加4倍.为顺应时代潮流,让盲人生活不再“盲”,就需要辅助工具来帮助盲人[1].社会上比较常见的传统导盲工具是导盲杖和导盲犬.导盲杖消耗体力、速度缓慢、效果差,导盲犬训练周期长、适应期长,并且价格昂贵,均不能适应大多数盲人[2].因此,为了进一步解决盲人的出行安全问题,提高他们的生活质量,人们开始研发造价低、局限性小的电子导盲机器人.已经成功研制的电子导盲工具主要有移动式机器人、穿戴式导盲仪和导引式手杖等.穿戴式导盲仪虽然可以将障碍信息很好地传达给使用者,但是其质量大、造价高,不能很好地满足大多数盲人的使用[3].导引式手杖去掉了导航功能,保留了探测功能,但是也由于成本较高而未能在市面上得到推广[4].移动式机器人具有功能更全面、智能程度更高、适应性更强的优点[5].因此以减轻盲人的出行负担和经济负担为初衷,仿照导盲犬设计出一款新型的牵引式半自动导盲机器人.在大多数的导盲器具中,超声波传感器和红外传感器是最主流的测距零件.超声波传感器具有很强的方向性,不易受到方向影响,可在多种介质中传播,但是探测范围有限,存在漏检盲区[6].红外传感器不受光线强弱的影响,探测距离较短,接收到的信号强度也不同[7].实现时将超声波传感器和红外传感器相结合,再加上GPS 导航仪,三者共同完成机器人的导盲探测任务.1 主要模块设计与实现1.1 PLC处理模块设计与实现PLC处理器部分主要由探测模块(GPS导航装置、红外感应装置、超声波感应装置)、PLC智能控制器、感知模块(语音播报系统、视频交互系统)和运动模块组成.PLC控制示意图如图1所示.图1 PLC处理模块示意图1.1.1 探测模块设计与实现探测模块的设计:(1)GPS导航仪用来设计路线,通过手动或语音输入起点和终点,然后将道路信息传给PLC控制器.为了更好接受并传递信息,避免信息受到干扰甚至中断,需要将GPS导航仪正确安装在角度为15°以上的开阔、无较大遮挡物、电磁波干扰较小的部位.因为GPS导航仪具有自动定位导航功能,所以出行时只需要确定行程的目标终点地;(2)红外传感器的原理是利用传感器发射的红外光线对障碍物反射回来的光束的强弱来判断距离的远近[8].采用无线连接,在测试范围内如果没有障碍物,发射管发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失.如果有障碍物,红外线测到障碍物,被反射到达接收管,信号经PLC控制器处理后控制小车向右转绕过障碍物,同时通过语音播报模块告知盲人后继续探测,没有障碍物,继续前进;若有障碍物,左向转弯180°探测,若仍然有障碍物,则原路返回;(3)超声波传感器的原理是通过发射器将声波发出,遇到障碍物后反射至接收器,根据声波发射到接受所用的时间间隔来计算距离.超声波传感器使用IC接口与PLC 相连,在通电启动时,系统便会开始自检,自检正常后,装置背后的LED灯会发出信息,并且经过PLC控制器判断无误后会由语音播报模块告知盲人此装置正常.装置启动后,如果收到经过PLC控制器处理过的盲人语言信息,LED灯会停止闪烁,进入指令探测模式.盲人发出指令后,经PLC控制器的处理,超声波传感器便可自动响应盲人的指令.发送探测指令后,需要等待一段时间才能获得数据,这是超声波装置的探测时间.之后这些数据信息会经过PLC控制器将数字信息转化成语音信息,告知盲人,并通过PLC控制器转化成指令信息引导电机自动转向,进而避开障碍物.探测模块的实现:(1)GPS导航仪用TiaiwaiT G9型号,使用精度为5米,输出电压为12V,蓄电池蓄电时间为2小时.(2)红外传感器选用GP2Y0A02YK0F红外避障传感器,使用电压为4.5~5.5V,测试范围为20~150cm,红外感应装置可感应上下角度60°,左右角度100°,6米以内的障碍物.(3)超声波传感器选用产品型号为KS101B,测量范围一般为墙体5米、人2米、水面及车5米.1.1.2 PLC控制器设计与实现由于PLC控制器具有良好的扩展性、较高的可靠性、丰富的功能模块和强大的指令系统,作为机器人的控制中心,在对机器人的控制过程中能够轻松地完成任务.作为机器人的中枢系统,PLC控制器主要用来控制转向电机的转向、处理探测系统所传来的信号,将之转换后传达给感知系统和运动系统,由运动系统完成避障,和GPS导航仪同时进行导盲工作.PLC控制器的组成示意图如图2所示.PLC控制器选用西门子生产的S7-200系列,CPU模块选用CPU224XP,继电器带模拟量6ES7 214-2BD23-0XB8.图2 PLC控制器的基本组成图1.1.3 感知模块设计与实现感知系统的设计:考虑到盲人独自出行时的安全问题,设计了视频交互系统.摄像记录仪会将道路的状况记录,可以通过手机终端由其他人进行实时监控.为了使摄像记录仪具有最好的拍摄角度,将其装于机器人顶端.感知系统的实现:摄像记录仪选用型号为WA-HY00L-X4,水平可旋转355°,垂直120°,1920×1080 高清分辨率,可远程控制;蜂鸣器选用HYD-4218压电式蜂鸣器,工作电压为DC9-15V,额定电流≤9mA,共振频率为2900±500Hz,工作温度为20℃~60℃.1.1.4 运动模块设计与实现运动模块主要有驱动轮,前进驱动电机,驱动轮系,转向驱动电机,转向轮系和底盘等构成.驱动电机通过齿轮传递将动力传递到驱动轮以提供前进动力,选择驱动轮内孔为8 mm.转向电机通过齿轮将扭矩传递至万向轮提供整体转向.为了减小机器人前进时由于路况带来的颠簸,将万向轮采用减震轮.为了便于安装,将驱动轴设计成阶梯轴.其中底盘需要一定的承重能力,所以采用承重能力好而且价格比较便宜的铝合金.运动模块实现图如图3,转向轮部分如图4.图3 运动模块实现图图4 转向轮示意图假设盲人行走速度0.5m/s,则驱动轮线速度0.5m/s,可得驱动轮转速0.2r/s.由于同轴转动转速相等,所以驱动齿轮转速为0.2r/s.设计时车体底盘低于驱动轮半径,为便于安装,将小齿轮齿数选为14.为更好地提供动力,令传动比为4,可得驱动齿轮齿数为56,转向齿轮转速为0.8r/s,电动机转速480rad/min;取模数为1,得驱动齿轮齿数为56,转向齿轮齿数为14,满足转向齿轮半径小于驱动轮半径[9].运动模块的实现:底盘为300mm×250mm×4mm的铝合金板;转向轮系由转向齿轮,驱动齿轮,万向轮(2寸)组成;转向电机由小功率电机提供整体转向;转动轮系由1模14齿齿轮、1模56齿齿轮组成;前进驱动电机转速为480转;驱动轮由2个4寸(100mm)橡胶轮组成.1.2 基础模块的设计与实现箱体及连杆的设计:其他部分由箱体、180°旋转可伸缩牵引手杆、控制手柄、开关、警示贴纸、常亮警示灯和电源组成.箱体内安装控制仪、感应器、导航仪、电机、电瓶,表面安装警示灯和贴警示贴纸用以提醒路人.伸缩杆连接箱体和控制手柄,内引导线.手柄上安装开关和方向键,与伸缩管内导线相连.箱体及连杆的实现:(1)将所有裸露导线和仪器(GPS、传感器部分、电机等)全部装在箱体中,防止灰尘和其它物质损耗仪器,缩短使用寿命;(2)把导盲仪的其它所有组成部分有规律且整齐地安放在箱体内部,防止导线混杂,影响设备,发生安全事故;(3)将箱体设计成长方体型,易于安装和拆卸;因为亚克力板硬度较大,价格低,选用外壳采用亚克力板为基本材料.底盘必需具有一定的承重能力,因此采用铝合金;(4)连杆部分使用180°旋转可伸缩牵引手杆,将把手和箱体连接在一起.在把手表层部分使用防滑橡胶,廉价环保,可让使用者更舒适地控制导盲仪运动.2 测试结果和性能分析测试实物图(图5)中1为驱动轮,2为WiFi发射器,3为PLC中央处理器,4为万向轮,5为变压器,6为驱动电机,7为蓄电池,8为超声波探测器,9为扩音器,10为红外线探测器,11为GPS导航仪,12为视频探测器,13为连杆.图5 牵引式半自动导盲机器人实物图开通电源后,语音或者手动输入目的地,GPS就会开始导航,超声波和红外感应器对前方的障碍物进行探测,并将是否探测到障碍物的电子信息传递到PLC控制器.PLC控制器将传感器测得距障碍物的距离信息进行二次处理,通过语音播报系统将信息播报.在机器人探测到障碍物时PLC控制器控制转向电机开始转向,进而通过万向轮系控制整体转向,同时视频交互系统可远程实时监控导盲机器人前方路况,监护人可及时提醒盲人,避开障碍后,PLC控制器断开转向驱动电机开关,转向结束,继续前进.经过测试,机器人灵敏度高,输出稳定,能够正确完成任务.3 结论牵引式半自动导盲机器人主要由PLC控制模块和基础模块组成.路面正常的情况下由GPS通过语音提示模块向使用者传递道路信息;当路面有障碍物时,被超声波传感器、红外传感器探测到后触发语音提示模块,使用者通过语音提示模块来了解路面情况.GPS、超声波传感器和红外传感器会将路况以及探测信息传达至中央处理模块,中央处理模块在收到信息后做出判断并对机器人进行微调,将运动信号传给运动系统,完成导盲避障任务.同时该导盲机器人设有视频交互模块(配套无限WIFI),监护人可从终端登陆相应APP,远程查看导盲仪前方路况,并告知盲人前方路况.参考文献:【相关文献】[1]王丽丽.电子导盲仪的发展现状与趋势[J].甘肃科技,2012,28(3):99-100.[2]易艺婷.导盲系统中的障碍物检测方案设计[D].哈尔滨:哈尔滨工业大学硕士学位论文,2015.[3]黄春燕,王冬梅,高育新,等.关于智能行走辅助仪的设计与研究[J].工业技术,2013,(10):150-151.[4]王扬,许勇,杨军.一种便携式超声导盲仪的设计与实现[J].声学技术,2011,30(6):295-296.[5]朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.[6]韦兴平,车畅,宋春华.超声波传感器应用综述[J].工业控制计算机,2014,27(11):135-136,139.[7]张邦成,张玉玲,王昕,等.超声红外复合测距系统设计[J].制造业自动化,2011,33(7):122-124.[8]张乐.基于AS-RF机器人平台的路径规划与自主避障系统的研究[D].南昌:南昌航空大学硕士学位,2014.[9]杨可桢,程光蕴,李仲生,等.机械设计基础[M].北京:高等教育出版社,2013:168-178.。
专题03利用回声测距离及声速的计算一、声与信息1. 声音传递信息:是指通过分析声音或回声可以得到某些信息。
2. 声传递信息的应用:蝙蝠捕食、倒车雷达、声呐、超声导盲仪、“B”超等。
(1)回声定位与测距 ①回声定位:蝙蝠在飞行过程中,会发出 ,这些声波遇到障碍物或昆虫时会反射回来,根据回事到来的方位和时间,蝙蝠可以确定目标的 ,这叫回声定位。
②回声测距:当声源静止时,声音从发出到碰到障碍物反射回声源处所走过的距离,是声源到障碍物距离的 ,即t v s 声21,其中t 为从发声到接收到回声的时间,v 声为声音的传播速度。
(2)倒车雷达:利用超声波探测汽车后方障碍物的 ,告知驾驶员周围障碍物的情况;(3)声呐设备:利用声波在水中的 和 特性,对水下目标进行探测,广泛用于鱼群探测、船舶导航和海底地质地貌的勘测等。
一.声音在不同介质中的传播速度(共6小题) (1)二.回声测距离的应用(共20小题) (2)一.声音在不同介质中的传播速度(共6小题)1.某课外活动小组的同学为了体验声音在不同介质是传播速度不同的物理现象,小红在输送水的直铁管道(充满水)上敲击一下,使铁管发出清脆的声音;小明沿铁管在水管的某一位置耳朵贴近铁管听声(已知声音在空气中的传播速度是v 气=340m/s ,在水中的传播速度是v 水=1700m/s ,在钢铁中的传播速度是v 铁=5100m/s ),若实验中小明只能听三、实战演练二、题型先知一、知识精讲到一次响声,则小明的位置到敲击点的距离范围是()A.s≤42.5m B.s<36.43mC.s≤255m D.255m>s≥36.4m2.甲同学将耳朵贴在一根15m铁管的一端,乙同学在另一端用力敲一下铁管,甲同学能听到(空气中声速为340m/s,铁中声速为5200m/s)()A.1次敲击声B.3次敲击声C.4次敲击声D.5次敲击声3.同学将耳朵贴在一根20m装满水的铁管的一端,乙同学在另一端用力敲一下铁管,甲同学能听到(已知空气中的声速为340m/s,水中声速为1500m/s,铁中声速为5200m/s)()A.1次敲击声B.2次敲击声C.3次敲击声D.多次敲击声4.甲同学将耳朵贴在一根20m铁管的一端,乙同学在另一端用力敲一下铁管,甲同学能听到(空气中声速为340m/s,铁中声速为5200m/s)()A.1次敲击声B.2 次敲击声C.3 次敲击声D.4 次敲击声5.一根长为L的直钢管,当在其中一端敲击一下时,其同学在另外一端听到了两次响声,并用秒表测量出时间间隔为t;第一次的响声是通过(选填“空气”或“钢管”)传递过来的,已知声音在空气中传播速度为v0,则声音在钢管中传播的速度表达式v1=(用题目中的字符表达)。
超声波盲人探路仪的设计摘要本文设计一种由74LS04反相器和CX20106搭接电路实现了超声波的发射与接收。
采用超声波发射与接受等技术,设计出盲人外出行走所需要提醒绕过前方障碍物的一种超声波探测器。
只需将超声波盲人探路器安装在盲人的拐杖上,当盲人在走路时前面有障碍物,拐杖上的盲人探路器就会发出报警声,因此起到提示的作用小心绕行。
并能语音播报离障碍物的距离,让盲人能够了解障碍物离自己的距离。
这种超声波盲人探路器使用方便可靠且价格低廉,适合盲人和老人夜间走路,能有效防止事故的发生, 盲人在外出时都会带一根拐杖来探路,以躲避障碍。
由于拐杖不可能太长,探测范围十分有限,利用超声波探测原理组成一个微型探测器并组装在拐杖手柄内,不仅可以提高探测效果和探测距离,而且使用十分方便。
【关键词】89C52 ;单片机;74LS04反相器CX20106电路;超声波的发射与接收;NY3P065AP8;语音芯片THE DESIGN OF THE ULTRASONIC BLIND LIGHTING APPARATUSAbstractIn this paper, the design of a 74LS04 inverter and CX20106 lap circuit achieves ultrasonic transmitter and receiver. Emitting and receiving ultrasonic technology, designed to remind the blind need to walk out in front of obstacles to bypass an ultrasonic detector. Just ultrasonic blind Pathfinder mounted on the blind cane, when there is an obstacle in front of the blind in walking, the blind Pathfinder crutches will sound an alarm on, and therefore play a role in prompting caution bypass. And can voice broadcast from the obstacle distance from obstacles so that blind people can understand their distance. This ultrasonic blind Pathfinder is reliable and easy to use and inexpensive, for the blind and the elderly to walk at night, can effectively prevent the occurrence of the accident, when the blind will go to Pathfinder with a crutch to avoid obstacles. Since crutches not be too long, the detection range is very limited, using ultrasonic detection principle to form a micro-probe and assembled in the cane handle, not only can improve the detection performance and detection range, and easy to use.【Keywords】89C52; SCM; 74LS04 CX20106 inverter circuit; ultrasonic transmitter and receiver; NY3P065AP8; voice chip目录摘要 (I)Abstract.......................................................................................................................................................... I I 目录 ............................................................................................................................................................ - 0 -第1章前言 .................................................................................................................................... - 1 -1.1系统开发背景..................................................................................................................... - 1 -1.2系统开发意义..................................................................................................................... - 1 -1.3设计目的............................................................................................................................. - 1 -第2章系统硬件电路的设计......................................................................................................... - 2 -2.1 主控芯片电路设计.................................................................................................................... - 2 -2.2 超声波测距电路设计................................................................................................................ - 3 -2.2.1 超声波发射电路设计............................................................................................................... - 4 -2.3 语音播报电路的设计.................................................................................................................. - 5 -2.4 蜂鸣器提醒电路的设计............................................................................................................ - 6 -第3章系统软件程序设计............................................................................................................. - 7 -3.1 超声波程序设计.......................................................................................................................... - 8 -3.2 语音播报程序设计...................................................................................................................... - 9 -3.3 蜂鸣器程序设计........................................................................................................................ - 10 -总结 ........................................................................................................................................................ - 11 -参考文献 .................................................................................................................................................. - 12 -附录 A ........................................................................................................................................................ - 0 -附录 B ........................................................................................................................................................ - 0 -致谢 ........................................................................................................................................................ - 5 -第1章前言1.1 系统开发背景蝙蝠能在完全黑暗中,以极快的速度精确地飞翔,从不会同前方的物体相撞,蝙蝠在飞行时,喉内产生并能从通过口腔发出人耳听不到的超声波,当遇到食物或障碍物时,超声波会反射回来,蝙蝠用两耳接受物体的反射波,并据此确定该物体的位置,并可从两耳分别接受到回波间的差别,来辨别物体的远近、形状及性质,蝙蝠在空中能利用超声波来“导航”,就能迅速准确捕捉飞虫。
人教版八年级物理上册第二章第3节声的利用第一部分:知识点一、基本概念:1、声与信息① 可直接听到的声音。
如雷声、心脏的跳动声、“闻”等。
中医诊病通过“望、闻、问、切”四个途径,其中“闻”就是听,这是利用声音诊病的最早例子。
② 直接听不到的声音。
如动物的交流声、地震、海啸发出的次声等。
③ 能听到的反射声。
如回音壁、建筑设计中的混响等。
④ 听不到的反射声音。
如蝙蝠的回声定位、利用声呐探测海深、B超超声。
蝙蝠采用的方法叫做回声定位。
现在,采用这个原理制成的超声导盲仪可以探测前进道路上的障碍物,以帮助盲人出行。
B超或彩超可以更准确地获得人体内部疾病的信息。
医生向病人体内发射超声波,同时接收体内脏器的反射波,反射波所携带的信息通过处理后显示在屏幕上。
超声探查对人体没有伤害,可以利用超声波为孕妇作常规检查,从而确定胎儿发育状况。
2、声与能量① 用超声波清洗精细的机械。
② 用超声波除去人体内的结石。
二、重、难点重点:声可以传递信息 可以传递能量。
难点:查找资料获取信息的能力。
三、知识点归纳及解题技巧运用分类声与信息声与能量日常生活隆隆的雷声――下雨听铁轨声――判断火车远近听蜜蜂飞行声音――判断是否采蜜归来爆竹升天 震耳欲聋医疗B超、听诊器超声波击碎体内结石声呐探测潜艇、鱼雷超声波干扰信号超声波测速工业交通声呐测距超声波探伤第二部分:相关中考题及解析1、(2012•通辽)关于声现象,下列说法正确的是()A.只要物体在振动,我们就能听到声音B.导致噪声污染的主要原因是由于噪声的音色C.用手机拨打放在真空罩中的手机,手机显示手机号,却听不到手机铃声D.用超声波能粉碎人体内的“小石头”,说明声波能传递信息解析:解决此题需掌握:(1)声音是由物体的振动产生的,由于受听觉所限,并不是所有的振动都能听到;(2)声音的传播需要介质,气体、液体、固体都能传声,但声音不能在真空中传播;(3)声音既可以传递信息也可以传递能量。
(4)声音有三个特性:音调、响度、音色。
超声波电子导盲仪_二等奖参赛队伍编号:作品名称:第二届福建地区“盛群杯”大学生单片机应用设计竞赛技术报告书参赛队伍编号: 080252作品名称: 超声波电子导盲仪提交日期: 2008年5月8日一、摘要超声波电子导盲仪应用超声波电位原理,神经元网络模式识原理。
由若干个探头探测物体的位置且将物体的位置信息送由单片机处理。
经模式识别后反馈给使用者。
使使用者能及时准确地避让或做出相关动作。
将最新科技运用于导盲仪,让使用者更多的感受到科技的关怀。
二、作品介绍人类通过眼睛获取的视觉信息量大约占大脑获取信息总量的大83%,也就是说对于外界的事物,绝大部分我们是通过视觉来了解的。
而我国共有盲人约877万,是世界上盲人最多的国家。
盲人生活在黑暗的世界里,在生活、工作和社交活动中都存在着诸多的困难,因而就需要我们给予更多的关心与帮助。
然而如何能安全的行走,就是盲人在生活中遇到的一个最基本也最重要的问题。
传统的盲杖虽然普及率较高,但在训练上需要花费一定的时间才能使盲人正常安全的外出行走;导盲犬价格昂贵,并且训练周期长,在普及方面有一定的困难。
鉴于以上的问题,在征求了导师的意见之后,我们决定以超声波电子导盲仪作为我们参赛的项目。
利用所学的专业知识,希望能够为盲胞们提供一点帮助。
该超声波导盲仪具备以下功能:, 应用超声波系统获得障碍物的方位信息以及移动状态。
, 将获得的信息通过声音的形式传达给使用者,比如障碍物的位置、移动速度、移动方向等等我们将利用所学的专业知识,查阅相关技术资料,在导师的指导下,培养独立思考及研发的能力。
通过实践来积累经验,锻炼实际动手的能力。
用我们的实际行动来造福社会~三、工作原理本项目利用超声测距原理,通过单片机控制超声波传感器的发送和接收,并检测发送和接收的时间差,然后再根据这个时间差计算出传感器前方距离,接着再以语音的形式提示盲人同志前方障碍物的位置。
1.超声波超声波简单的说就是音频超过了人类耳朵所能够听到的范围。
---文档均为word文档,下载后可直接编辑使用亦可打印---摘要本文介绍的是一款基于STC89C52RC单片机芯片的超声波导盲系统。
该系统利用HC-SR04超声波模块,通过单片机的控制收发超声波,实现对障碍物进行检测,然后利用收发时间差以及超声波在空气中的传播速度,完成对距离的计算,最后通过单片机的一系列处理,将结果反馈给盲人用户。
本文将从该系统设计的理论基础超声波测距原理开始,详细地阐述超声波测距理论基础、HC-SR04超声波模块的使用、DS1302时钟模块的使用、YF017语音模块的使用。
本文还通过利用DS1302时钟模块及YF017语音模块配合单片机的I/O口,为导盲系统添加了诸如按键语音日历、语音报时及语音报距等对于盲人比较友好的功能。
关键词:单片机;超声波测距;导盲仪;DS1302;YF017;HC-SR04;STC89C52RCAbstractThis article describes an ultrasonic blinding system based on the STC89C52RC microcontroller chip. The system uses the HC-SR04 ultrasonic module to send and receive ultrasonic waves through the control of a single-chip microcomputer to detect obstacles, and then uses the time difference between sending and receiving and the propagation speed of ultrasonic waves in the air to complete the calculation of the distance. Finally, it is processed by a series of single-chip microcomputers. Feedback results to blind users.This article will begin with the theoretical basis of the design of the ultrasonic distance measurement principle, detailed description of ultrasonic ranging theoretical basis, the use of HC-SR04 ultrasonic module, the use of DS1302 clock module, the use of YF017 voice module.This article also uses the DS1302 clock module and YF017 voice module in conjunction with the I/O port of the microcontroller to add features such as keypad voice calendar, voice announcement, and voice pitch to the blinding system.Key words: MCU; Ultrasonic distance measurement; Guidance system; DS1302; YF017;HC-SR04; STC89C52RC第一章绪论1.1研究背景根据最新的数据分析:全世界已经拥有接近1亿的盲人群体,这是一个非常巨大的群体,并且盲人群体的数量每年的增长数量也十分惊人,据不完全统计这个数字大约在七八百万左右。
人教版物理八年级上册第二章知识点总结打印版第二章声现象一、声音的产生1、声音是由物体的振动产生的;(人靠声带振动发声、爆炸声、风声、气球破裂是空气振动发声、弦乐器靠弦振动发声,管制乐器考里面的空气柱振动发声,弦乐器靠弦振动发声、鼓靠鼓面振动发声,蚊子是翅膀振动发声等等);2、振动停止,发声停止;但声音并没立即消失。
(因为原来发出的声音仍可以继续传播);3、一切发声的物体都在振动,真空不能传声,月球上(太空中)的宇航员只能通过无线电话交谈;注:有声音物体一定振动,有振动不一定能听见声音;(低于20 Hz或者高于20000Hz 或没有介质)。
4、发声体可以是固体、液体和气体;发声的物体叫做声源。
5、声音的振动可记录下来,并且可重新还原(唱片的制作、播放);二、声音的传播1、声音的传播需要介质;固体、液体和气体都可以传播声音;2、真空不能传声(真空就是空无一物,没有介质);3、声音以波(声波)的形式传播;4、声速:声音在每秒内传播的距离叫声速,单位是m/s;声速的计算公式是v=s/t;15℃声音在空气中的速度为340m/s; s是距离,单位是米(m),t是时间,单位是秒(s)5、声速的大小跟介质的种类和温度有关。
一般情况下,声音在固体中传得最快,气体中最慢;V固>V液V 气在同一种介质中,一般是温度高时声速快。
三、回声声音在传播过程中,遇到障碍物被反射回来,再传入人的耳朵里,人耳听到反射回来的声音叫回声(如:高山的回声,夏天雷声轰鸣不绝,北京的天坛的回音壁)1、听见回声的条件:原声与回声之间的时间间隔在0.1s以上,距障碍物至少17 m(S=Vt/2=340×0.1÷2m=17m)(教室里听不见回声,小房间声音变大是因为原声与回声重合);2、回声的利用:测量距离(车到山,海深,冰川到船的距离);声音传播路程:S=v* t,距离L= S /2(由题的条件判断是否除以2)3、百米赛跑时,计时员听到枪声跟看到发令枪冒烟哪个准确?看到冒烟准确,听到枪声后计时比看到冒烟慢了t=s/v=100 m/340m/s=0.29 s,运动员的成绩比实际高0.29 s。
考试范围:xxx;满分:***分;考试时间:100分钟;命题人:xxx 学校:__________ 姓名:__________ 班级:__________ 考号:__________一、选择题1.如图所示,小明用小锤轻敲和重敲音叉时,分别将悬挂的轻质小球紧靠音叉,发现小球弹起的角度不同,比较角度大小是为了探究()A.声音的产生原因B.响度和频率的关系C.音调和频率的关系D.响度和振幅的关系2.唐代诗人张继留下的诗并不多,但一首《枫桥夜泊》伴随苏州城,伴随寒山寺流传千年。
在《枫桥夜泊》中曾写到“姑苏城外寒山寺,夜半钟声到客船”。
下列对钟声的解释正确的是()A.钟声是由空气的振动产生B.钟声是由钟体的振动产生C.钟声可以在真空中传播D.钟声是通过水传到诗人的耳朵3.唐代诗人岑参的诗中有“中军置酒饮归客,胡琴琵琶与羌笛。
”胡琴、琵琶、羌笛各是一种乐器,它们演奏出来的声音可能具有的相同特征是()A.音调响度B.音色响度C.音色音调D.音色音调响度4.支付宝用户可以对支付宝账号设置“声音锁”。
设置时用户打开支付宝APP,对着手机读出手机显示的数字,APP将主人的声音信息录入,以后打开支付宝时,APP会把录入的数字随机组合,主人无论轻声或大声,只要读对APP显示的数字即可打开支付宝。
支付宝设置“声音锁”利用了声音的()A.响度和音调B.响度和音色C.音调和音色D.只有音色5.唐朝一寺庙所藏的罄常常无故自鸣,和尚不知其因而被惊吓以致患病,后经人指点方知与前殿的钟有关,击此应彼,故钟鸣罄响。
关于此现象,下列说法正确的是()A.“钟鸣罄响”是一种回声现象B.“罄无故自鸣”说明有些物体不振动也可以产生声音C.“钟鸣罄响”说明钟和罄一起在做相同形式的振动D.“钟鸣罄响”说明钟和罄的音色和音调都不同6.下列事例中不是利用声波能传递信息的是()A.医生通过听诊器给病人诊病B.盲人利用超声波导盲仪探测前进道路上的障碍物C.接收次声波等信息判断地震的方位D.利用超声波排除人体内的结石7.下列关于声音的说法中不正确的是()A.“响鼓也要重锤敲”,说明声音是由振动产生的,且振幅越大响度越大B.超声波听起来比较高亢,次声波听起来比较低沉C.“闻其声知其人”,说明可以根据音色来判断说话者D.“隔墙有耳”,说明固体能传声8.关于声现象,下列说法正确的是()A.“闻其声而知其人”是根据声音的响度来判断的B.“隔墙有耳”说明固体能传声C.“长啸一声,山鸣谷应”是指次声波传播很远D.“不敢高声语,恐惊天上人”中的“高”是指声音的音调高9.下列实例,利用声传递能量的是()A.利用超声给金属工件探伤B.医生通过听诊器给病人诊病C.利用超声波除去人体内的结石D.超声导盲仪帮助盲人出行10.小梦做了如图所示的实验:改变钢尺伸出桌面的长度,用相同的力拨动钢尺,听声音的变化和钢尺振动的变化可以得出()A.音色与发声体的材料有关B.音色与发声体振动的幅度有关C.响度跟发声体振动的幅度有关D.音调与发声体振动的频率有关11.中考期间,考场附近“禁鸣喇叭”,从有效控制噪声的角度分析是属于()A.控制噪声源B.控制噪声的传播途径C.保护受噪声影响者D.控制噪声的音调和音色12.下列关于声现象的说法中正确的是()A.物体振动越快音调越高B.声音在真空中的传播速度是3×108m/sC.打雷时捂住耳朵可以防止雷声的产生D.地震、火山喷发等自然现象都伴有超声波的产生13.2019年10月1日,在北京天安门广场举行了盛大的阅兵式。
超声导盲仪:
一:避障:
1:超声波:超声波发生器内部结构有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频时,
压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波本时,将压迫压
电晶片作振动,将机械能转换为电信号,就成为超声波接收器。
在
超声探测电路中,发射端得到输出脉冲为一系列方波,其宽度为发
射超声的时间间隔,被测物距离越大,脉冲宽度越大,输出脉冲个
数与被测距离成正比。
超声测距大致有以下方法:①取输出脉冲的
平均值电压,该电压 (其幅值基本固定 )与距离成正比,测量电压即
可测得距离;②测量输出脉冲的宽度,即发射超声波与接收超声波
的时间间隔△t,故被测距离为 S=S=V·△t/2 。
本测量电路采用第
二种方案。
2:红外:了解市场上目前还没有用红外来制作导盲仪的,但是却有
红外测距仪,由于红外线有热效应,测量的距离较短,我觉得可以
讲超声和红外一起使用的导盲仪上;目前红外测距仪一般的距离为0.5~300米可以用作遇到危险情况时的壁障。
二:提醒:
利用软件提醒:
利用T0 的CTC模式产生40kHz的方波通过PB3 输出到CD4049的第三脚。
用T1 256分频的T-Clock作为计时基本单位,通过读取TCNT1的
值获取时间信息。
利用外部中断INT0捕捉接收电路的信号标志。
通过PD2脚把接收
信号送回单片机触发中断。
按键中断通过INT1实现。
通过按键外部中断来控制语音电路是否读出距离。
单片机每过一段时间发送一段超声波,然后等待是否有反射超声波。
如果有则进入中断,否则继续发送。
通过INT2中断进入语音菜单子程序,然后用INT1和INT2两个中
断进行功能选择。
测距程序流程图:
三:盲人摔倒报警;
由于盲人看不见物体,摔倒时都会受到些许惊吓,此时体内的肾上腺素会上升,可以通过测体内肾上腺素的变化,来判断是否有
摔倒状况,来结合超声波报警器报警
四:其他功能
还可以结合图像和光波采集器来采集周围环境或者是交通灯的变化
来只是盲人行动.
朱禾 11级生物医学工程。