一种采用Ad Hoc技术的无人机自组网系统模型
- 格式:doc
- 大小:31.00 KB
- 文档页数:4
移动自组网一、介绍移动自组网(Mobile Ad Hoc Network,简称MANET)是一种无线网络体系结构,由一组移动节点组成,这些节点通过无线链路相互连接,并在没有中央控制的情况下自组织地进行通信。
相比传统的固定网络,移动自组网具有更大的灵活性和适应性,可以在没有基础设施的情况下实现临时网络连接。
二、拓扑结构移动自组网通常采用分散式的拓扑结构,节点之间通过无线链路连接,并根据网络中的动态变化自主地选择最佳的路由路径。
这种拓扑结构可以适应节点的移动和网络拓扑的变化,从而满足不同应用场景的需求。
三、路由协议在移动自组网中,路由协议是实现节点之间通信的关键。
常见的路由协议有以下几种:1.AODV路由协议(Ad hoc On-demand Distance Vector):AODV是一种基于距离向量的路由协议,它通过建立路由请求和路由反馈消息来动态地维护路由表,实现节点之间的通信。
2.DSR路由协议(Dynamic Source Routing):DSR是一种基于源路由的协议,它使用源节点将整个路由路径编码到数据包中,并通过逐跳传输的方式实现路由。
DSR具有较低的开销,适用于小规模的移动自组网。
3.OLSR路由协议(Optimized Link State Routing):OLSR是一种基于链路状态的路由协议,它通过建立邻居节点列表和多点中继集合来组织网络拓扑,并根据网络状态实时更新路由表。
四、应用场景移动自组网具有广泛的应用场景,如下所示:1.军事通信:移动自组网可以被应用于军事作战、军事演习等场景,通过快速、可靠的通信实现指挥和控制。
2.紧急救援:在自然灾害或紧急事故发生时,移动自组网可以在短时间内搭建起临时的通信网络,帮助救援人员进行沟通和协调。
3.智能交通:移动自组网可以用于城市交通管理系统,实现车辆之间的信息交换和协同,提高交通效率和安全性。
4.物联网:移动自组网可以作为物联网的底层网络结构,连接传感器、设备和云端,实现设备之间的即时通信和数据传输。
Ad Hoc网络综述摘要:Ad Hoc 网络是一种新型、多跳、自组织的无线网络,借助于多跳转发技术来弥补无线设备的有限传输距离,网络节点能够动态地、随意地、频繁地进入和离开网络,从而拓宽网络的覆盖范围,为用户提供各种服务、传输各种业务。
由于Ad Hoc网络是一种新型的无线移动网络,因其独特的组网特性,使得安全问题成为其发展的最大束缚。
路由协议的安全是自组网安全的一个重要部分。
文中扼要介绍了Ad Hoc 网络的发展历史、概念、主要特点、国内外的研究现状及 Ad Hoc 网络的应用,并指出了Ad Hoc 网络管理面临的问题,重点论述了移动Ad Hoc网络中的安全问题,介绍了多种安全路由的协议和方案,并对其中的三种按需安全路由协议进行了比较,最后提出进一步研究Ad Hoc网络路由安全应注意的问题。
关键词:Ad Hoc网络;无线移动网络;网络安全;安全路由协议;1.引言Ad Hoc网络是一种具有多跳性,无需任何基站支撑的无线自组织移动网络。
在未来移动通信领域,由于Ad Hoc网络无需基站支撑因而具有架设方便等优点,它将广泛应用于移动办公、移动漫游等方面;特别是未来军事战争中,将是不可缺少的无线通信网络。
Ad Hoc网络具有自组织性和拓扑动态变化的特点。
目前Ad Hoc 网络的研究热点问题为路由协议、服务质量、MAC 协议、与蜂窝移动通信系统的整合、安全性问题。
Ad Hoc 网络既可以作为一种独立的网络运行,也可以作为当前具有固定设施网络的一种补充形式,在恶劣环境中支持移动节点之间的数据、语音、图像和图形等业务的无线传输,应用范围可以覆盖工业、商业、医疗、家庭、办公环境、军事等各种场合。
本篇综述概括了2004-2009年的关于Ad hoc网络的发展历程、前景、设计理念、网络安全设计以及安全路由协议等方面的参考文献,集中了关于Ad hoc网络的最新技术理念。
2.概述Ad Hoc自组网作为一种新型的无线移动网络,不像传统的无线网,它不依赖于任何固定设施,而是通过移动节点间的相互协作保持网络互联。
无线自组网技术综述和设计摘要无线自组织网络即MANET(Mobile Ad Hoc Network)是一种不同于传统无线通信网络的新型网络,具有自组织、多跳路由和动态拓扑等特点,在军事上和商业应用中有着很大的前景。
无线自组织网络可以不必依托于基础设备,组网拥有了动态性。
从现状看,自组织网络可被用作商业及军事,注重了网络本体的移动属性。
在各个领域内,无线架构的自组织网络获取了明显进步。
然而,受到自身约束,这类网络仍存有若干疑难有待于化解,例如隐暴终端、路由是否拥有最优的适应特性、系统配备的单向链路。
关键词:无线自组织网络;关键技术;应用现状AbstractWireless ad hoc networks, which are different from traditional wireless communication networks, have many characteristics, such as self-organization, multi hop routing and dynamic topology, which have great prospects in military and commercial applications. Wireless ad hoc networks do not have to rely on the infrastructure, the network has a dynamic. From the current situation, the self-organizing network can be used as the commercial and military, and it has a focus on the mobile property of the network ontology. In all areas, the wireless architecture of the self-organizing network has made significant progress. However, subject to its own constraints, there are still some problems to be resolved in this kind of network, such as the hidden storm terminal, routing has the best adaptive characteristics, the system is equipped with a one-way link.Keyword: MANET; key technology; Application status前言随着社会的发展和科技的进步,人们对信息的需求日益高涨,而随时随地获取所需信息的渴望更使无线网络得到飞速的发展,在过去的十年里,无线自组网已经成为移动通信技术研究的热点之一,正得到越来越广泛的应用,并将在未来的通信技术中占据重要地位。
美军TTNT数据链发展应用现状金荣1,张衡阳2【摘要】TTNT数据链是一种基于IP的航空Ad hoc网络,是美军正在研制的新型先进武器协同级数据链。
本文简要阐述了TTNT数据链的基本情况、技术特点、性能指标,回顾了它的发展历程,抛砖引玉地分析了其中主要关键技术,其MAC协议、路由协议和物理终端电台的设计紧紧围绕着打击“时敏目标”的要求展开,旨在实现空-空和空-地低时延网络通信。
【期刊名称】现代导航【年(卷),期】2014(000)002【总页数】3【关键词】战术瞄准网络技术;数据链;自组网0 引言近几次高技术局部战争表明,美军现有武器装备和技术已基本具备精确打击固定目标的能力,但是打击活动目标(时敏目标)的能力则不够充分。
因此,美军决定要发展一种支持实时火控过程,灵活、动态、快速、大容量的战术数据链,快速而准确地协同感知和确定战术目标的位置,并进行快速精确协同打击。
2001年美军启动的战术瞄准网络技术(Tactical Targeting Networks Technology:TTNT)是当前航空数据链中最为先进的技术之一[1]。
10多年时间内经过多次试验,结果表明该技术已经逐渐成熟,作为美军战术数据链,在未来作战应用中将发挥重要的作用。
1 TTNT数据链简介1.1 研究目标在目标探测、主动识别、瞄准、打击、摧毁的全过程中,TTNT提供为预警机、战斗机、无人机、情报和监视侦察平台以及地面作战平台之间提供鲁棒的、高性能、互操作的低时延数据通信,能够快速定位“时敏目标”,支持实时火控过程,同时使附带毁伤最小。
1.2 技术特点(1)架构:专用Ad hoc网络,可以实时重构并具备灵活性;(2)体系:采用IP协议体系结构,易于与其它网络互通;(3)有效性:网络带宽宽、时延小、高优先级信息接入成功率高;(4)可靠性:网络健壮,自愈性强,可动态自配置;(5)灵活性:通信容量视战况实时配置,用户入网/退网方便;(6)兼容性:作为一个模块加装在Link-16终端上,采用J系列报文消息格式,与Link-16完全兼容,并可通过网关接入全球信息栅格;(7)多元性:业务多样,包括文本聊天、电子邮件、静止图像文件共享、双向视频流、目标瞄准、基于IP的飞行任务信息以及跟踪数据态势感知。
AD-hoc⽹络介绍AdHoc⽹络的概念Ad Hoc⽹络是⼀种没有有线基础设施⽀持的移动⽹络,⽹络中的节点均由移动主机构成。
Ad Hoc⽹络最初应⽤于军事领域,它的研究起源于战场环境下分组⽆线⽹数据通信项⽬,该项⽬由DARPA资助,其后,⼜在1983年和1994年进⾏了抗毁可适应⽹络SURAN(Survivable AdaptiveNetwork)和全球移动信息系统GloMo(Global Information System)项⽬的研究。
由于⽆线通信和终端技术的不断发展,Ad Hoc⽹络在民⽤环境下也得到了发展,如需要在没有有线基础设施的地区进⾏临时通信时,可以很⽅便地通过搭建Ad Hoc⽹络实现。
在Ad Hoc⽹络中,当两个移动主机在彼此的通信覆盖范围内时,它们可以直接通信。
但是由于移动主机的通信覆盖范围有限,如果两个相距较远的主机要进⾏通信,则需要通过它们之间的移动主机B的转发才能实现。
因此在Ad Hoc⽹络中,主机同时还是路由器,担负着寻找路由和转发报⽂的⼯作。
在Ad Hoc⽹络中,每个主机的通信范围有限,因此路由⼀般都由多跳组成,数据通过多个主机的转发才能到达⽬的地。
故Ad Hoc⽹络也被称为多跳⽆线⽹络。
Ad Hoc⽹络可以看作是移动通信和计算机⽹络的交叉。
在Ad Hoc⽹络中,使⽤计算机⽹络的分组交换机制,⽽不是电路交换机制。
通信的主机⼀般是便携式计算机、个⼈数字助理(PDA)等移动终端设备。
Ad Hoc⽹络不同于⽬前因特⽹环境中的移动IP⽹络。
在移动IP⽹络中,移动主机可以通过固定有线⽹络、⽆线链路和拨号线路等⽅式接⼊⽹络,⽽在Ad Hoc⽹络中只存在⽆线链路⼀种连接⽅式。
在移动IP⽹络中,移动主机通过相邻的基站等有线设施的⽀持才能通信,在基站和基站(代理和代理)之间均为有线⽹络,仍然使⽤因特⽹的传统路由协议。
⽽Ad Hoc⽹络没有这些设施的⽀持。
此外,在移动IP⽹络中移动主机不具备路由功能,只是⼀个普通的通信终端。
第1节Ad Hoc网络概述1.1.1 Ad Hoc 网络的产生背景无线通信网络按照组网控制方式分为2类:1.具有预先部署的网络基础设施的移动网络:例如:蜂窝移动通信系统,无线局域网无线局域网(WLAN)结构图2.无基础设施的移动网络对于某些特殊场合,如:战场上部队的协同通信,地震或水灾后的营救,野外科学考察、临时会议等。
在这种情况下,就需要一种能够临时快速自动组网的移动通信技术,这就形成了另一类移动通信技术,即Ad Hoc网络通信技术.“Ad Hoc”一词来源于拉丁语,意思是:”专用的、特定的”Ad Hoc 网络通常也称为”无固定设网”、“自组织网”、“多跳网络”、“MANET”目前,Ad Hoc 网络已经得到了国际学术界和工业界的广泛关注.1.1.2 Ad Hoc 网络的历史发展自组网最初是应用于军事领域的,1972年DARPA(美国国防部高级研究计划署)资助研究了分组无线网PRnet(Packet Radio Network);其后,又由DARPA资助,于1993和1994年进行了高残存性自适应网络SURAN (Survivable Adaptive Network)和全球移动信息系统GlOMo(Globle MobileInformationSystems)的研究;Ad Hoc就是吸取了上述三个项目的组网思想,从而产生的一种新型的网络构架技术;IEEE802.11委员会称之为“Ad Hoc网络”,而IETF称之为MANET。
1.1.3 Ad Hoc 网络的定义Ad Hoc网络是由一组带有无线收发装置的移动终端组成的一个多跳的、临时性自治系统,整个网络没有固定的基础设施。
在自组网中,每个用户终端不仅能移动,而且,兼有路由器和主机两种功能。
一方面,作为主机,终端需要运行各种面向用户的应用程序;另一方面,作为路由器,终端需要运行相应的路由协议,根据路由策略和路由表完成数据的分组转发和路由维护工作。
Ad Hoc网络的研究现状与发展摘要:Ad Hoc网络做为一种能够临时快速自动组网的移动通信技术越来越得到专家们的重视,目前Ad Hoc网络也是无线网络研究中的一个重点和热点。
介绍了Ad Hoc网络的特点和应用以及Ad Hoc网络的研究状况。
关键词:Ad hoc网络;自组织;多跳网络;移动终端1 Ad Hoc网络的概念即移动自组网通信技术,也即无线Ad Hoc网络。
“Ad Hoc”一词来源于拉丁语,是“特别的,专门的”意思。
这里提出的“Ad Hoc 技术”就是一种特定的无线网络结构,强调多跳(Multi-hop)、自组织、无中心的概念,因此国内一般把基于Ad Hoc。
技术的网络译为“自组网”或者“多跳网络”等等。
2 Ad Hoc网络的特点与应用2.1 Ad Hoc网络与传统通信网络的比较与传统通信网络相比,Ad Hoc网络具有以下特点:(1)无中心和自组织性。
Ad Hoc网络没有绝对的控制中心,所有节点地位平等,各节点通过网络协议和分布式算法协调工作,节点可以随时加入和离开网络;(2)动态变化的网络拓扑。
Ad Hoc网络的移动节点能以任何速度和方向移动,加上无线信道的功率和干扰等因素,因而网络拓扑随时变化并难以预测;(3)移动终端的便携性和资源局限性。
移动终端虽具有轻巧便携等优点,但也存在能源受限、内存较少、CPU处理能力较低等缺点;(4)安全性差。
由于采用无线信道、分布式控制等技术,Ad Hoc网络的安全性较差,容易受到网络入侵和攻击,影响整个网络的性能。
2.2 Ad Hoc网络的应用Ad Hoc网络的无中心设施的优点是不可替代的,其应用可归纳以下几类:(1)军事应用:Ad Hoc网络具有的无基础设施特点非常适应了现代战争快速准确的要求,如美军的数字电台NTDR利用了AdHoc网络技术;(2)灾后紧急应用:在发生地震、洪水等自然灾害后,固定的通信设施可能无法运作,但又需要有效的救灾措施和技术。
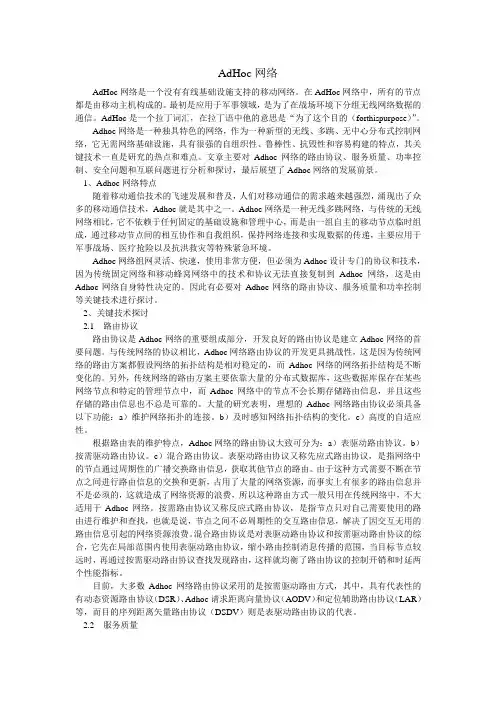
AdHoc网络AdHoc网络是一个没有有线基础设施支持的移动网络。
在AdHoc网络中,所有的节点都是由移动主机构成的。
最初是应用于军事领域,是为了在战场环境下分组无线网络数据的通信。
AdHoc是一个拉丁词汇,在拉丁语中他的意思是“为了这个目的(forthispurpose)”。
Adhoc网络是一种独具特色的网络,作为一种新型的无线、多跳、无中心分布式控制网络,它无需网络基础设施,具有很强的自组织性、鲁棒性、抗毁性和容易构建的特点,其关键技术一直是研究的热点和难点。
文章主要对Adhoc网络的路由协议、服务质量、功率控制、安全问题和互联问题进行分析和探讨,最后展望了Adhoc网络的发展前景。
1、Adhoc网络特点随着移动通信技术的飞速发展和普及,人们对移动通信的需求越来越强烈,涌现出了众多的移动通信技术,Adhoc就是其中之一。
Adhoc网络是一种无线多跳网络,与传统的无线网络相比,它不依赖于任何固定的基础设施和管理中心,而是由一组自主的移动节点临时组成,通过移动节点间的相互协作和自我组织,保持网络连接和实现数据的传递,主要应用于军事战场、医疗抢险以及抗洪救灾等特殊紧急环境。
Adhoc网络组网灵活、快速,使用非常方便,但必须为Adhoc设计专门的协议和技术,因为传统固定网络和移动蜂窝网络中的技术和协议无法直接复制到Adhoc网络,这是由Adhoc网络自身特性决定的。
因此有必要对Adhoc网络的路由协议、服务质量和功率控制等关键技术进行探讨。
2、关键技术探讨2.1路由协议路由协议是Adhoc网络的重要组成部分,开发良好的路由协议是建立Adhoc网络的首要问题。
与传统网络的协议相比,Adhoc网络路由协议的开发更具挑战性,这是因为传统网络的路由方案都假设网络的拓扑结构是相对稳定的,而Adhoc网络的网络拓扑结构是不断变化的。
另外,传统网络的路由方案主要依靠大量的分布式数据库,这些数据库保存在某些网络节点和特定的管理节点中,而Adhoc网络中的节点不会长期存储路由信息,并且这些存储的路由信息也不总是可靠的。
无线自组织网络关键技术与进展(1)无线自组织网络由不需要任何基础设施的一组具有动态组网能力的节点组成,这种网络适应了军事和商用中对网络和设备移动性的要求,而引起了人们的关注,并在20世纪90年代以后获得了广泛的研究和发展。
与其他通信网络相比,无线自组织网络具有带宽有限、链路容易改变、节点的移动性以及由此带来的网络拓扑的动态性、物理安全有限、受设备限制等特点。
正是由于这些区别,无线自组织网络协议栈也产生了比传统网络协议栈更高的要求:适应移动分布节点随机收发行为的媒体接入控制(MAC)协议,基于动态拓扑结果的高效、稳健的路由算法,便利的异构网络互联技术,有效的功率控制,合理的跨层信息交互、多层协同设计,可靠的安全机制等等。
1 MAC协议MAC协议是无线自组织网络协议的重要组成部分,是分组在无线信道上发送和接收的主要控制者。
目前,在无线自组织网络中MAC协议面临着隐藏终端、暴露终端,信道分配,单向链路,广播扩散等问题。
1.1隐藏终端、暴露终端问题如图1所示,节点A、B、C都工作在同一个信道上,当节点A向节点B发送分组时,载波侦听机制无法阻止节点C发送数据,造成信号在节点B处冲突。
节点C是隐藏在节点A 的覆盖范围之外的、却又能对节点A的发送形成冲突的节点,这种在发送节点覆盖范围以外的、存在着潜在冲突的节点问题就是信道访问中的隐藏终端问题。
隐藏终端问题会大大降低信道的通信能力。
另外还有一种情况也会降低信道的通信能力,即所谓的暴露终端问题。
如图2所示,当节点B向节点A发送分组时,节点C侦听到节点B在发送分组,所以推迟发送分组。
这种推迟是毫无必要的,因为节点C向节点D发送分组和节点B向节点A发送分组并不冲突,此时节点C是节点B的暴露终端。
这种因发送节点在其覆盖范围内,感知到有其他节点在传输,而进行不必要的发送延迟就是暴露终端问题。
IEEE 802.11中提出的请求发送/准备接受/确认(RTS/CTS/ACK)握手机制,以及目前在很多研究中提出的控制信道-数据信道协作的方式,可以在一定程度上解决隐藏终端问题,但对于暴露终端问题,目前还没有充分有效的解决方式。
无人机集群自组织网络路由协议研究及优化无人机集群自组织网络路由协议研究及优化摘要:无人机集群自组织网络(UAVCN)是一种通过无人机的互联网络来实现信息传输和协作的重要技术。
为了实现高效、可靠的通信,无人机集群需要一种有效的网络路由协议。
本文对无人机集群自组织网络路由协议进行了研究,并提出了一种优化方案,以提高网络的传输效率和稳定性。
一、引言随着无人机技术的快速发展,无人机集群已被广泛应用于军事、救灾、物流等领域。
无人机集群自组织网络通过建立无人机间的通信链路来实现信息的传输和共享,是实现无人机集群协同工作的基础。
然而,无人机集群网络路由协议的设计和优化是一个重要而具有挑战性的问题。
二、无人机集群网络路由协议1. 网络拓扑发现与维护无人机集群网络的拓扑是动态变化的,无人机在飞行过程中可能会进入或离开网络,因此网络拓扑的发现和维护是无人机集群自组织网络的首要任务。
现有的网络路由协议中,无人机集群通常采用基于邻居发现的方法,通过交换邻居信息来建立和更新网络拓扑。
2. 路由算法设计无人机集群网络路由协议的设计需要考虑网络效率、传输延迟和路由稳定性。
传统的无人机路由算法常采用AODV(Ad hoc On-demand Distance Vector)和DSDV(Destination-Sequenced Distance Vector)等路由协议。
然而,针对无人机集群网络的特点,需要设计适用于无人机动态变化拓扑和高速移动的路由算法。
三、无人机集群网络路由协议的优化1. 路由表更新机制的优化由于无人机集群网络的拓扑是动态变化的,路由表的更新机制对网络的性能有着重要影响。
传统路由表更新机制需要频繁地广播更新信息,造成了大量的通信开销。
为了减少通信开销,可以采用基于邻域变化的路由表更新策略,当邻域发生变化时才进行路由表的更新。
2. 路由选择策略的改进传统路由选择策略通常根据跳数或跳数和路径质量来选择最佳路由。
蜂窝adhoc网络概述作者:瞿谨来源:《中国新通信》2014年第04期一、ad hoc网络与蜂窝网络的结合在移动无线通信网络原有的网络构架技术中通常包括蜂窝移动通信网络和无线局域网,蜂窝移动通信网络移动终端接入固定网络是基于基站的中心接入方式,而无线局域网则要通过接入点(AP)完成终端接入固定网络,这两种网络都是单跳网络。
ad hoc技术所标称的是一种有别于中心接入和单跳的特征,强调多跳和无中心接入,移动终端不仅具有主机的功能,还具有路由器的功能,使得无线移动ad hoc网络被认为是下一代移动通信系统解决方案中最有希望被采用的末端网络。
在实际应用中,ad hoc网络既可以单独组网实现局部通信外,又可作为末端子网通过网关连接到现有的网络基础设施上,蜂窝移动通信是一项十分成熟的技术,在蜂窝系统中,控制部分几乎全部集中在基站和基站控制器,移动设备变得相对简单。
相对于ad hoc网络的分布式控制来说,蜂窝系统的集中控制显得效率更高。
另外,ad hoc网络很难组成大规模的网络。
然而,传统蜂窝网络建设成本高昂,建设速度也比较缓慢,建成以后就很难进行大规模调整,也不能很好地适应负载的变化,针对这些问题的解决方案是将ad hoc网络与传统蜂窝网络相结合。
蜂窝ad hoc网络是一个自组织的多跳网络,通过多个接入点与宽带核心网络相连。
蜂窝ad hoc网络与孤立的ad hoc网络的区别在于蜂窝ad hoc网络中的大部分业务都将通过接入点进行转发。
二、ad hoc网络与传统蜂窝网络结合的ODMAODMA是一种自适应、灵活的、结合了自组网和传统蜂窝网络特性的接入技术。
ODMA 网络的最大特点是既存在基站,也允许用户相互中继。
ODMA作为UMTS(Universal Mobile Telecommunication System)的一项补充技术, ODMA网络的终端可以灵活地选择传统蜂窝的单跳工作方式或分布式网络中常见的多跳工作方式。
Ad hoc网络终端的实现及U-boot的移植的开题报告一、课题背景随着移动互联网的发展,人们对于无线通信技术的需求不断增长。
Ad hoc网络作为一种基于无线技术的自组织网络,具有自配置、自管理和自维护等特点,在无线通信和网络应用方面具有广泛的应用前景。
Ad hoc网络是指由无线终端节点自行组成的网络,无需预先规划和中心控制节点的存在,任何终端节点都可以与任何其他节点相互通信,形成多跳无线网络。
在Ad hoc网络中,设备需要从底层上支持以无线方式通信。
此外,为了更好地管理和控制Ad hoc网络,还需要将U-boot系统移植到终端设备上。
因此,本课题的研究目的是实现Ad hoc网络终端设备的无线通信以及U-boot系统的移植,为后续的应用开发奠定基础。
二、研究内容1. Ad hoc网络通信①选择适当的通信协议和协议栈进行实现;②实现无线通信的底层驱动程序和中间层协议;③设计和实现Ad hoc网络节点的路由协议。
2. U-boot系统移植①分析目标硬件平台的体系结构和特点;②理解U-boot系统的工作原理和机制;③对不同平台的U-boot系统进行移植。
三、预期成果完成Ad hoc网络终端设备的无线通信实现和U-boot系统的移植,能够正常启动和运行。
针对Ad hoc网络路由协议的研发,可实现网络中的节点之间的互联互通功能。
在此基础上,可以应用于嵌入式应用的开发中,实现完整的嵌入式系统开发。
四、研究意义实现Ad hoc网络终端设备的无线通信以及U-boot系统的移植,可以扩展移动互联网的应用范围和覆盖面。
Ad hoc网络具有自组织、动态组网等特点,可以降低设备之间的耦合度,并提高网络的可扩展性和可靠性,为后续的应用开发提供基础条件。
同时,U-boot系统移植是为了更好地管理和控制Ad hoc网络,提高终端设备的自动化程度。
一种采用Ad Hoc技术的无人机自组网系统模型
摘要:简述Ad Hoc的概念,提出了一种采用Ad Hoc技术的无人机自组网系统模型,并介绍其组成原理、工作方式、应用特点。
分析了无人机自组网系统模型的几个技术难点并提出了相应解决方案。
最后介绍了欧美国家无人机自组网的发展情况。
关键词:Ad Hoc 无人机自组网路由协议
1 引言
无人机在现代战争中的作用越来越重要,无人机具有体积小、机动性强、成本低等优点,已经广泛的应用于战场侦察、地形勘探等领域。
当一组无人机群实现自组网,其战斗力将有质的飞跃,本文介绍一种采用Ad Hoc技术来实现无人机的组网的实现模型,是目前该领域热点技术之一。
2 Ad Hoc网络介绍
Ad Hoc网络是一种多跳的、无中心的、自组织无线网络, 又称为多跳网(multi- hop network) 、无基础设施网( Infrastructurelessnetwork) 或自组织网( self- organizing network) [1]。
整个网络没有固定的基础设施, 每个节点都是移动的, 并且都能以任意方式动态地保持与其它节点的联系。
在这种网络中, 由于终端无线覆盖取值范围的有限性, 两个无法直接进行通信的用户终端可以借助其它节点进行分组转发。
每一个节点同时是一个路由器, 它们能完成发现并且维持到其它节点路由[2]。
无线Ad Hoc网络在很多方面区别于其他通信网络[3],表现在: ①移动自组织。
除了网络节点外没有固定的基础设施, 每个节点都具有路由功能, 支持随时随地通信, 能自发组建移动网络; ②动态拓扑。
节点可以自由的加入或者离开ad hoc 网络, 这导致网络拓扑结构频繁变化; ③无线多跳通信。
由于无线信号的衰减特性, 无线通信范围外的通信需要由中间节点( 普通节点)完成路由转发功能;
④完全分布式。
Ad Hoc网络是由对等节点构成的网络, 不存在中心控制, 管理和组网都非常简单灵活; ⑤严格的资源限制。
有限的带宽和能源是所有无线网络的普遍特征,但由于无线Ad Hoc网络没有基站的支持, 依靠有限的能量提供路由转发功能。
3 无人机自组网系统模型
图1是一种无人机自组网系统模型。
该网络系统包括8个节点,其中地面节点1个(G1),空中节点7个,包括6架无人机(U1~U6)和1架有人机(H1)。
网络中的节点可以根据战术需求任意移动,从而导致网络拓扑的随意变化,在此过程中,要保证地面车G1、有人机H1发出的遥控信息实时传输到U1~U6这6架无人机,U1~U6这6架无人机产生的侦察信息(包括视频图像)实时传输到地面车G1,G1处观察到的图像要连贯,没有明显的图像损失,足以向战场决策人员提供实时战场侦查视频。
在这个网络中,每一个无人机节点都兼具路由器和终端两种功能:作为路由器,节点需要运行相应的路由协议,根据路由策略和路由表参与数据转发及路由维护工作;作为终端,节点可以运行相应的应用程序。
每一个无人机都配有电台,根据相关算法,每一个无人机所获得的侦察信息都能通过无线网络达到实时共享。
无人机节点根据无人机所处位置寻找临近的无人机节点,从而依次、逐跳地连接成网,如图1所示。
若节点U1想要和节点U4通信,就需要借助其它临近节点的路由和中继转发,逐跳地将数据转发给目的节点,如可以选择U1U2U3U4这一转发路径,也可以选择U1U6U3U4。
整个过程完全由各个无人机节点运行分布式路由算法自动完成,无需任何其它的设施。
当所选路径上单个无人机节点受到损毁时或与邻近无人机距离较大导致链路断开等情况发生时,原有的路由就会被破坏,但整个网络仍然存活,此时,受影响的节点就要自发寻找另外一条替代路径,如图1所示,转发路径U6U3U4U5上的无人机节点U4无法继续提供转发服务,此时路由就自动切换到U6U3U2U5这一转发路径上,这样就实现了自组网的抗毁伤和自愈合功能,来保证通信的继续进行,完成战术信息的交互共享,从而大大提高了无人机的工作效率和生存能力。
各无人机之间除了要交换控制指令[4],还要共享侦察图像信息,控制信息数据量比较小、速率低,一般从几Kbps到几十Kbps,为保证有效性,误码率要求小于1×10-7,最大时延小于50ms;侦察图像信息数据量大,信息速率高达几十Mbps,误码率要求小于1×10-5,最大时延小于0.5s。
4 无人机自组网系统模型的技术难点
无人机自组网具有无线传输、高度的动态拓扑、无中心、多跳路由等特点,这使得许多问题变得复杂而难以实现。
现有的有线网络和蜂窝网络中使用的各种协议和技术无法直接应用于自组网。
自组网具有独有的特性,以及这些特性带来了系统模型实现上的难点问题:
4.1 动态变化的网络拓扑结构
在无人机自组网中,由于无人机的随机移动、无线信道间的相互干扰以及地
形等综合因素的影响,移动终端间通过无线信道形成的网络拓扑结构随时变化,而且变化的方式和速度都是不可预测的,这使得路由异常重要。
目前的路由协议基本上可以分为两类:一类是表驱动路由协议, 有DSDV、OLSR 等;一类是按需路由协议, 有DSR 、AODV等,这些路由协议都是基于单路径路由算法,如果能够在此基础上扩展多径路由,把流量和能耗分配到多条节点独立的路径上,既可以有效地利用带宽、减小拥塞和增加传输可靠性,又可以实现负载和能耗均衡,从而能够延长网络的生存时间。
所以,多径路由协议也成为近来学者们研究的热点之一,国内外专家还相继在DSR和AODV的基础上提出了一些多径路由算法,如DMPSR 、MD2SR 、MSR 、SMR 、NDM 、AOMDV等[5]。
4.2 多跳组网方式
当无人机自组网中的节点要与其覆盖范围之外的节点通信时,需要通过中间节点的多跳转发。
多跳,是研究自组网路由协议的前提基础。
与固定网络的多跳路由不同,自组网的多跳路由由普通的网络节点完成,而不需要专用路由设备(路由器)。
自组网的MAC接入协议必须解决多跳网络带来的新问题,如隐藏和暴露终端、资源的空间利用等。
利用无人机自身携带的导航系统,可以方便地通过全球定位系统或北斗系列导航系统获得精度很高的定位信息和星上授时信息,其中授时信息可以在一定范围内精确地实现网内同步。
因此,对于无人机自组网系统可以采用同步MAC协议。
适用于同步网络的MAC层协议,常用的有RR-ALOHA、TBMAC0和HRMA 等协议。
此类协议的应用基础是物理信道可以划分为帧或是时隙,节点间能够实现精确的时钟同步。
这样,对于周期业务,尤其是对定长分组的周期性支持较为方便。
RR-ALOHA协议是针对民用车载通信系统而设计的,所以接入控制比较方便。
TBMAC协议把网络分布的地理区域划分成了动态的小区,小区半径与节点传输范围有关,这样尽量减少隐藏终端的影响。
小区间则采用预留信道的方式实现通信。
HRMA协议则是基于极慢调频技术的一种协议,实现了时分与频分相结合的信道分配方式[6]。
无人机自组网系统通常具有群移动性,且对协议的可靠性要求较高,所以协议中需要采取措施保证节点获得信道的可靠性,从而实现分组的无冲突传输。
4.3 有限的无线传输带宽
由于自组网采用无线传输技术作为底层通信手段,而无线信道本身的物理特性决定了它所能提供的网络带宽,再加上竞争共享无线信道产生的碰撞、信号衰减、信道间干扰等多种因素,移动终端可得到的实际带宽远远小于理论上的最大带宽值,同时无人机自组网系统要进行大量的数据交换和传输,高速数据传输问题是自组网的基础性技术问题。
随着信息技术的迅速发展,信息与通信理论研究的不断深入,以及电子制造工艺的长足进步,通信技术又有了许多新的发展和突破。
目前可用于无人机自组网系统物理层通信的新技术主要有:高频谱利用率的多载
波调制技术、智能天线技术、信道的多输入多输出技术等。
5 结语
当前国外对无人机组网的研究已经取得了一些成果,Brown T等人通过固定在小型无人机上的IEEE 802.1lb自组网设备,通过试验验证了3跳以内的语音传输。
Daniel LG等人提出在分想定环境中无人机Ad Hoe网络仿真研究,实现级Ad Hoc网络中将无人机作为路由器节点负责路由信息的采集和分发,通过改进路由协议HSR(Hierarchical state routing),达到了良好的试验效果。
Samad T等人在分析了无人机和城市地形的特点后,提出组建无人机Ad Hoe网络将在城市网络中心战中充分发挥无人机的优势,及时捕获和传输战场信息[7]。
无人机自组网方面,我国的研究刚刚开始,Ad Hoc技术的特点和优势是明显的,这里还有很多东西有待于研究和开发。
本文仅仅是对无人机自组网模型的一种设想,以供参考。
参考文献:
[1] 刘晓红.移动ad hoc 网络的特点及应用[J].现代通信,2007.
[2] 孔小柏.无线ad hoc 网络技术研究[J].福建电脑,2008.
[3] 程艾艾.无线ad hoc 网络的现状研究[J].微处理机,2005.
[4] 黄志清.无人机ADHOC网络物理层技术探讨[J].信息安全与通信保密,2008.。