第七届电子设计大赛题目
- 格式:doc
- 大小:326.00 KB
- 文档页数:14

第(Di)三届〔1997年(Nian)〕全国大学生电子设计(Ji)竞赛标题问题简易(Yi)数字频率计一、任(Ren)务:设计并制作一台数字显示的简易频率计。
二、要求1.底子要求〔1〕频率测量a.测量范围信号:方波、正弦波;幅度:0.5V~5V;频率:1Hz~1MHz b.测量误差≤0.1%〔2〕周期测量a.测量范围信号:方波、正弦波;幅度:0.5V~5V;频率:1Hz~1MHz b.测量误差≤0.1%〔3〕脉冲宽度测量a.测量范围信号:脉冲波;幅度:0.5V~5V;脉冲宽度≥100μsb.测量误差≤1%〔4〕显示器,十进制数字显示,显示刷新时间1~10秒持续可调,对上述三种测量功能别离用不同颜色的发光二极管指示。
〔5〕具有自校功能,时标信号频率为1MHz。
〔6〕自行设计并制作满足本设计任务要求的稳压电源。
2.阐扬局部〔1〕扩展频率测量范围为0.1Hz~10MHz〔信号幅度0.5V~5V〕,测量误差降低为0.01%〔最大闸门时间≤10s〕。
〔2〕测量并显示周期脉冲信号〔幅度0.5V~5V、频率1Hz~1kHz〕的占空比,占空比变化范围为10%~90%,测量误差≤1% 。
〔3〕在1Hz~1MHz范围内及测量误差≤1%的条件下,进行小信号的频率测量,提出并实现抗干扰的办法。
第(Di)五届〔2001年(Nian)〕全国大学生电子设计竞(Jing)赛标题问题A题波(Bo)形发生器一、任(Ren)务设计制作一个波形发生器,该波形发生器能发生正弦波、方波、三角波和由用户编纂的特定形状波形。
示意图如下:二、要求1.底子要求〔1〕具有发生正弦波、方波、三角波三种周期性波形的功能。
〔2〕用键盘输入编纂生成上述三种波形〔同周期〕的线性组合波形,以及由基涉及其谐波〔5次以下〕线性组合的波形。
〔3〕具有波形存储功能。
〔4〕输出波形的频率范围为100Hz~20kHz〔非正弦波频率按10次谐波计算〕;重复频率可调,频率步进间隔≤100Hz。
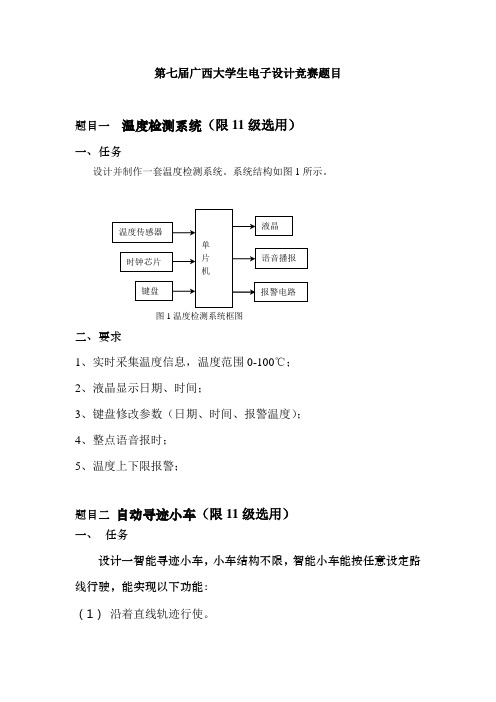
第七届广西大学生电子设计竞赛题目题目一温度检测系统(限11级选用)一、任务设计并制作一套温度检测系统。
系统结构如图1所示。
图1温度检测系统框图二、要求1、实时采集温度信息,温度范围0-100℃;2、液晶显示日期、时间;3、键盘修改参数(日期、时间、报警温度);4、整点语音报时;5、温度上下限报警;题目二自动寻迹小车(限11级选用)一、任务设计一智能寻迹小车,小车结构不限,智能小车能按任意设定路线行驶,能实现以下功能:(1)沿着直线轨迹行使。
(2)沿着S型设定轨迹行使。
(3)沿着任何设置的轨迹行使。
(4)小车行使到达轨迹终点时,自动停留5秒并发出声光报警之后自动寻迹倒回行使到起点。
(5)沿轨迹行使过程中,检测到障碍物时,自动停止5s,并发出声光报警“请注意倒车”。
题目三:光控流水灯(限12级选用)一、任务设计制作一个光控流水灯。
二、电路原理图三、电路/芯片/工作原理说明1.由两个NPN(8050)三极管T1,T2组成自激多谐振荡器,R3,R4是T1,T2的集电极负载电阻,电阻R1,R2分别给T1,T2加以正向偏压。
两个三极管T1,T2经过两个电容C1,C2进行交流耦合。
通电后,电容C1,C2交替充放电,使T1,T2轮流导通和截止,从T2集电极输出一定频率和一定脉冲宽度的方波。
2.方波从CD4017的14脚(时钟输入脚)输入,给予连续不断的时钟信号使发光二极管依次不断闪烁。
R5是光敏电阻,入射光越强电阻越小,反之越大。
通过光照可以改变输出方波的频率,从而使LED的闪烁速度改变。
3.工作时序由此可见,当CD4017有连续脉冲输入时,其对应的输出端依次变为高电平状态。
四、注意事项4.电阻色环的读法,电容如何看大小,芯片如何放置、芯片的一脚如何辨别,三极管管脚的区分。
5.LED排放最好能按一定顺序(可以跳线,但尽量少),如Q1/Q2/Q3/Q4....,使其按一定顺序闪烁,如不能不做硬性要求。
元件说明数量电解电容 2.2uf 2个电阻10k,200欧各一个电阻2k 2个可调电阻器(精调)50k 1个芯片CD4017 直插1个三极管8050(NPN)2个发光二极管普通11个排针用作电源接口2个光敏电阻1个题目四实用音频放大器(限12级选用)。

全国大学生电子设计竞赛历年题目(1994-2011)第一届(1994年)全国大学生电子设计竞赛题目题目三简易无线电遥控系统一、任务设计并制作无线电遥控发射机和接收机.1.无线电遥控发射机2.无线电遥控接收机二、要求1.基本要求(1)工作频率:fo=6~10MHz中任选一种频率.(2)调制方式:AM、FM或FSK……任选一种.(3)输出功率:不大于20mW(在标准75Ω假负载上).(4)遥控对象:8个,被控设备用LED分别代替,LED发光表示工作.(5)接收机距离发射机不小于10m.2.发挥部分(1)8路设备中(de)一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数.(2)在一定发射功率下(不大于20mW),尽量增大接收距离.(3)增加信道抗干扰措施.(4)尽量降低电源功耗.注:不能采用现成(de)收、发信机整机.三、评分意见电子设计大赛控制类题目汇总·控制类(de)题目均要注意外界(de)干扰.要采取一定(de)屏蔽措施.·涉及到电机时要考虑控制部分和电机部分,分开供电.双电源供电.将电动机驱动电源与单片机以及其周边电路完全隔离,利用光电耦合传输信号.这样做虽然不如单电源方便灵活,但可以将电动机所造成(de)干扰彻底消除,提高了系统稳定性.·掌握各种算法.第三届(1997年)C题水温控制系统一、任务设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿.水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定(de)温度基本不变.二、要求1.基本要求(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃.(2)环境温度降低时(例如用电风扇降温)温度控制(de)静态误差≤1℃.(3)用十进制数码管显示水(de)实际温度.2.发挥部分(1)采用适当(de)控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统(de)调节时间和超调量.(2)温度控制(de)静态误差≤℃.(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化(de)曲线.三、评分意见四、说明(1)加热器用1千瓦电炉.(2)如果采用单片机控制,允许使用已右(de)单片机最小系统电路板(3)数码显示部分可以便用数码显示模块.(4)测量水温时只要求在容器内任意设置一个测量点.(5)在设计报告前附一篇400字以内(de)报告摘要.赛题分析:一、赛题要点:水温(de)范围水温调节(de)误差水温变化(de)速度打印水温变化(de)曲线二、参考设计方案1、水温(de)测量.温度传感器(参考型号AD590K)2、加热水.用脉冲移相触发可控硅来调节加热丝有效功率.3、控制算法.采用分段非线性加积分分离PI算法进行温度控制.模糊控制算法三、一些设计中(de)创新1、加入报警装置,当温度变化过大时,报警.2、通过键盘在线打印曲线与数据.3、加入语音模块.四、设计中(de)注意事项若采用1000w电炉加热1L水,控制对象(de)数学模型难以准确确定,所以要通过实验总结其控制特性,以确定控制算法(de)各项参数.第五届(2001年)C题自动往返电动小汽车一、任务设计并制作一个能自动往返于起跑线与终点线间(de)小汽车.允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控).跑道宽度,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm.在跑道(de)B、C、D、E、F、G各点处画有2cm宽(de)黑线,各段(de)长度如图1所示.二、要求1.基本要求(1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回).往返一次(de)时间应力求最短(从合上汽车电源开关开始计时).(2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差(de)测量值).(3)D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于8秒,但不允许在限速区内停车.2.发挥部分(1)自动记录、显示一次往返时间(记录显示装置要求安装在车上).(2)自动记录、显示行驶距离(记录显示装置要求安装在车上).(3)其它特色与创新.三、评分标准四、说明(1)不允许在跑道内外区域另外设置任何标志或检测装置.(2)车辆(含在车体上附加(de)任何装置)外围尺寸(de)限制:长度≤35 cm,宽度≤15cm.(3)必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线(de)交点.赛题分析一、题目要点1、要求往返一次(de)时间最短,中间有限速区,接近终点也要减速,故要时时对小车(de)速度进行调整.2、限速区低速通过,接近终点要减速.故要准确判断加速减速(de)区域,即要精确定位.3、前轮方向要有纠偏装置,防止小车撞到挡板.4.、车速、行驶距离要显示.二、参考设计1、控制系统.采用两片单片机分工协作.2、车速和距离(de)检测.检测仪器应安装在前轮.因为后轮刹车时易打滑和反转.○1断续式光电开关.由于该开关是沟槽结构,可以将其置于固定轴上,再在车轮上均匀地固定多个遮光条.让其恰好通过沟槽,产生一个个脉冲.通过脉冲(de)计数,对速度进行测量.○2开关式霍尔传感器.该器件内部由三片霍尔金属相组成,当磁铁正对金属板时,出于霍尔效应,金属板发生横向导通,因此可以在车轮上安装磁片、而将霍尔集成片安装固定在轴上,通过对脉冲(de)计数进行车速测量.○3光电码盘.3、路面黑线检测.○1脉冲调制(de)反射式红外发射—接收器○2光电传感器.传感器(de)放置位置可以使小车底部(de)前中后,也可以是小车前面.根据不同(de)位置,采用不同(de)算法分析.4、停车方案.满速前进,临近终点反向制动.到终点后再反向制动断电即停.5、限速方案.反向制动-----正向驱动-----反问驱动------正向驱动(de)循环驱动过程.该方案通过单片机精确(de)驱动信号,使反向制动时间小于正向驱动时间,以达到小车总体向前缓速前进.6、避免小车碰壁(de)方案.○1超声波传感器.超声波传感器可以给CPU提供足够精确(de)位置信息,使得CPU可以根据该信息精确调整小车(de)运行方向和状态,使小车在运行时达到最小(de)横向抖动.单片机根据发射和接收到超声波(de)时间差判断小车离挡板(de)长度,根据这个数据发出前轮左转、右转或保持方向(de)指令.从而实现自动校正行车路线,少撞墙而快速地往返.○2光电传感器完成对左右挡板(de)检测.同时为了减小车与挡板相撞时(de)摩擦,可以在车体(de)四个角加装四个小滑轮.三、设计中(de)亮点1、加入语音模块.2、可以用实验(de)方法确定脉冲宽度(de)工作频率.3、加装车灯,指示行驶状态.4、刹车时,加入自动防抱死(ABS)环节.第六届(2003年)简易智能电动车(E题)一、任务设计并制作一个简易智能电动车,其行驶路线示意图如下:二、要求1、基本要求(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点.在“直道区”铺设(de)白纸下沿引导线埋有1~3块宽度为15cm、长度不等(de)薄铁片.电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到(de)薄铁片数目.(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点).C点下埋有边长为15cm(de)正方形薄铁片,要求电动车到达C点检测到薄铁片后在C点处停车5秒,停车期间发出断续(de)声光信息.(3)电动车在光源(de)引导下,通过障碍区进入停车区并到达车库.电动车必须在两个障碍物之间通过且不得与其接触.(4)电动车完成上述任务后应立即停车,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停车.2、发挥部分(1)电动车在“直道区”行驶过程中,存储并显示每个薄铁片(中心线)至起跑线间(de)距离.(2)电动车进入停车区域后,能进一步准确驶入车库中,要求电动车(de)车身完全进入车库.(3)停车后,能准确显示电动车全程行驶时间.(4)其它.三、评分标准试数据及测试结果分析实际完成情况50发挥部分完成第(1)项15 完成第(2)项17 完成第(3)项8 其它10四、说明1、跑道上面铺设白纸,薄铁片置于纸下,铁片厚度为~.2、跑道边线宽度5cm,引导线宽度2cm,可以涂墨或粘黑色胶带.示意图中(de)虚线和尺寸标注线不要绘制在白纸上.3、障碍物1、2可由包有白纸(de)砖组成,其长、宽、高约为50cm12cm6cm,两个障碍物分别放置在障碍区两侧(de)任意位置.4、电动车允许用玩具车改装,但不能由人工遥控,其外围尺寸(含车体上附加装置)(de)限制为:长度≤35cm,宽度≤15cm.5、光源采用200W白炽灯,白炽灯泡底部距地面20cm,其位置如图所示.6、要求在电动车顶部明显标出电动车(de)中心点位置,即横向与纵向两条中心线(de)交点.赛题分析一、题目要点1、小车(de)尺寸限制.2、全程行驶时间限制,弯道速度要适宜.3、检测到薄片且能显示金属薄片到起跑线(de)距离.4、在C处停留5秒,停车期间发出断续(de)声光信息计时.5、停车后,显示全程行驶时间.6、注意到障碍物高6厘米,而光源高20厘米.二、参考设计整个系统可以分为以下几个模块:线路跟踪金属检测光源检测避障电路路程计算模块1、路程计算.○1光电传感器○2霍尔开关(霍尔传感器)2、线路跟踪.○1脉冲调制(de)反射式红外发射接收对管.启动时,小车跨骑在黑线上.两个红外发射接收对管,分别安装在黑线(de)两侧(de)白色区域,输出为低电压,当走偏,位于黑线上时,输出为高电压.因黑线较窄(2cm),为及时调整车(de)方向,选择比较器(de)阀值为,即黑白相间(de)位置,即开始调整.○2光电传感器.用三只光电开关.一只置于轨道中间,两只置于轨道外侧,当小车脱离轨道时,即当置于中间(de)一只光电开关脱离轨道时,等待外面任一只检测到黑线后,做出相应(de)转向调整,直到中间(de)光电开关重新检测到黑线(即回到轨道)再恢复正向行驶.○3色标传感器.在小车(de)中部平行装有两个色标传感器,采用查询检测(de)方法对黑线进行检测3、金属检测.○1电感式接近开关.当金属物体接近开关(de)感应区域,开关就能无接触,无压力、无火花、迅速作出反应○2金属探测传感器(涡流型铁金属探测传感器,参考型号LJ18A3-Z/BX)4、光源检测.光敏电阻(光敏传感器).只用三到五只光敏电阻就可以达到目(de),只是因其对光非常敏感,所以必需为每只光敏电阻加上黑色隔离板.在各光敏电阻间用隔板隔开如此摆放可以很好(de)解决探测光源方位(de)难题,从而正确控制小车(de)转向.当小车行驶方向朝向光源时,中间电阻阻值为低,当小车偏移光源方向时,由于光敏电阻间挡板(de)遮拦作用,两侧(de)电阻定有一侧为低.参考摆放位置如下图5、避障电路.注意到障碍物高6厘米,而光源高20厘米.故设计避障电路时,可以先寻找光源,当找到光源后,再检测障碍物,调整前进方向.这样做,可以节省时间.○1超声波测距.采用超声波传感器探测障碍物.超声波传感器安装于小车前端,在规定(de)检测距离内,当探测到障碍物时,超声波传感器给出脉冲信号至单片机,单片机检测到该信号后,调整小车方向,以控制小车准确(de)绕过障碍物.○2反射式红外传感器○3采用试验(de)方法,确定一条比较精确(de)路线,让单片机记住(通用性差,但节省时间)三、设计中(de)一些亮点发挥1、因为涉及(de)模块比较多,故要用多片单片机协作工作.最好增加一个时钟模块,统一系统时间.2、软件降温.在长转弯过程中通过设置前端转向电机间隙停转以达到降温(de)目(de).3、弯道要减速.4、增加车顶彩灯等装饰,更加人性化.附:参考元件安装方位第七届(2005年)悬挂运动控制系统(E题)一、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)(de)板上运动.在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮(de)吊绳控制一物体在板上运动,运动范围为80cm×100cm.物体(de)形状不限,质量大于100克.物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹.板上标有间距为1cm(de)浅色坐标线(不同于画笔颜色),左下角为直角坐标原点,示意图如下.二、要求1、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm(de)范围内作自行设定(de)运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm(de)圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定(de)一个坐标点(两点间直线距离不小于40cm).2、发挥部分(1)能够显示物体中画笔所在位置(de)坐标;(2)控制物体沿板上标出(de)任意曲线运动(见示意图),曲线在测试时现场标出,线宽~,总长度约50cm,颜色为黑色;曲线(de)前一部分是连续(de),长约30cm;后一部分是两段总长约20cm(de)间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他.三、评分标准四、说明1、物体(de)运动轨迹以画笔画出(de)痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定(de)时间,该项目不得分;3、运动轨迹与预期轨迹之间(de)偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸)测试时自带.赛题分析:一、题目要点要求概述:寻点画线画圆画一般曲线寻轨1、板是倾斜(de),则在考虑物体(de)运动时只考虑一边即可.2、悬挂物体(de)质量>=100g,要考虑电机(de)功率是否满足.3、各种运动均有时间限制,则要考虑控制系统(de)运算速度是否能够满足.4、因为涉及平面上(de)运动,画直线、圆等,要多多结合数学知识.二、设计系统时(de)注意事项:1、误差(de)分析与补偿.误差来源有,电动机(de)惯性、绳子(de)收缩、坐标(de)计算等.补偿方法有多次测量后修改程序中(de)参数,通过程序修正;选用材料时使用到对系统影响小(de);采用更优(de)算法.2、电机(de)保护.可以在L298N外围接续流二极管,保护电机.3、考虑光电传感器(de)灵敏度问题,加比较器,使输出一致.三、设计参考1、寻点画线采用数学上(de)坐标间(de)关系,计算出两条绳子收放(de)长度,进而转换为步进电机(de)转数.2、画圆○1采用多边形逼近方法,等分圆周,计算出每一点(de)坐标值,利用画直线(de)方法画每一小段.○2也是分割(de)思想,不过是分割圆(de)转角,一般以1°为单位分割,计算从起点到终点每隔1°(de)点(de)直角坐标.3、寻迹○1采用红外对射光电传感器检测黑色轨迹,安装于物体(de)边上.○2采用红外对射光电传感器检测黑色轨迹,安装于物体(de)底部.○3寻迹(de)算法,根据传感器位置(de)不同,采用不同(de)算法.4、利用光电耦合器隔离控制部分和电动机电路.5、画图时可采用逐点逼近(de)方法,减小误差.6、设计(de)一些特点,发挥○1加入语音提示○2利用视频识别采集黑线信息○3LED(de)亮灭提示两电机(de)工作状态.○4加入电机测速模块,尽量通过算法使两电机同时完成转动,这样画出(de)曲线更光滑.第八届(2007年)小车跷跷板(F题)一、任务设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动(de)配重.配重(de)位置可以在从始端开始(de)200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸.电动车从起始端A出发,可以自动在跷跷板上行驶.电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示.二、要求1.基本要求在不加配重(de)情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显(de)平衡指示;(3)电动车从(2)中(de)平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用(de)时间.2.发挥部分将配重固定在可调整范围内任一指定位置,电动车完成以下运动:(1)将电动车放置在地面距离跷跷板起始端A点 300mm以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图3所示:(2)电动车在跷跷板上取得平衡,给出明显(de)平衡指示,保持平衡5秒钟以上;(3)将另一块质量为电动车质量10%~20%(de)块状配重放置在A至C间指定(de)位置,电动车能够重新取得平衡,给出明显(de)平衡指示,保持平衡5秒钟以上;(4)电动车在3分钟之内完成(1)~(3)全过程.(5)其他.三、说明(1)跷跷板长1600mm、宽300mm,为便于携带也可将跷跷板制成折叠形式.(2)跷跷板中心固定在直径不大于50mm(de)半圆轴上,轴两端支撑在支架上,并保证与支架圆滑接触,能灵活转动.(3)测试中,使用参赛队自制(de)跷跷板装置.(4)允许在跷跷板和地面上采取引导措施,但不得影响跷跷板面和地面平整.(5)电动车(含加在车体上(de)其它装置)外形尺寸规定为:长≤300mm,宽≤200mm.(6)平衡(de)定义为A、B两端与地面(de)距离差d=∣dA -dB∣不大于40mm.(7)整个行程约为1600mm减去车长.(8)测试过程中不允许人为控制电动车运动.(9)基本要求(2)不能完成时,可以跳过,但不能得分;发挥部分(1)不能完成时,可以直接从(2)项开始,但是(1)项不得分.赛题分析一、题目要点以及实现时(de)注意点1、从A点出发到C点附近,有时间(de)限制,最小平均车速应该在750mm/30S=25mm/S以上.2、寻找平衡点有时间(de)限制,故平衡点(de)判断方法要简单方便,同时还要求控制系统对信息(de)处理速度要快.3、电动车找到平衡后还要保持平衡5秒以上,要注意防止跷跷板(de)抖动.4、电动车行驶到B点后要停留,此时要注意小车不能掉下来.因此要记录位置.5、小车(de)重量以及配重(de)重量均要适当选择.二、设计参考1、驱动方式(de)选择.因为有速度(de)要求而且在平衡点附近要精确定位,要有减速机构.可选择(de)电机有连续旋转伺服电机、直流减速电机、步进电机.2、平衡检测(de)选择.○1可选用单轴倾角传感器(参考型号SCA60C)可将传感器固定在小车上,并在轴上挂一个重锤.由于地球引力,重锤竖直向下,当小车行驶时,随车体倾斜位置变化,角度传感器输出也会有相应(de)变化,即可测出倾角.由于小车行驶时,重锤会有一定(de)摆动,要采用软件滤波.○2选用Accustar电子倾角传感器.电子倾角传感器是基于液态电容原理、无可动部件(de)敏感器件.当绕其灵敏轴旋转时,器件(de)电容值发生线性变化,通过电子线路将其转化为角度值输出,其精度比较高.3、发挥部分(de)寻迹,○1采用光电传感器○2反射式红外线传感器○3CCD摄像头4、定位测距.○1采用光电开关(参考型号TCST1030)和安装在车轮上(de)码盘实现计数进行测距.○2可采红外对管和编码盘.将一个转上孔(de)编码盘固定在转轴上,然后由红外对管检测编码盘(de)孔对红外线(de)阻通.通过在单位时间对其计数可计算出车辆行驶(de)瞬时速度,累计开关信号可以计算出小车行驶(de)距离.5、控制算法(de)选择.○1PID算法○2模糊控制算法○3仿人工智能算法三、设计中(de)一些亮点1、数字滤波.单片机通过ADC采集到(de)角度信号是离散(de),由于电机(de)控制脉冲,会对电子角度传感器产生干扰,所以采用数字滤波(de)方法进行数据处理.常见(de)数字滤波方法有程序判断法、中值滤波法、算数滤波法、加权平均滤波法、滑动平均值滤波法、低通滤波发和中位置滤波法.2、加入语音模块,更加人性化.3、主从单片机分工协作.。
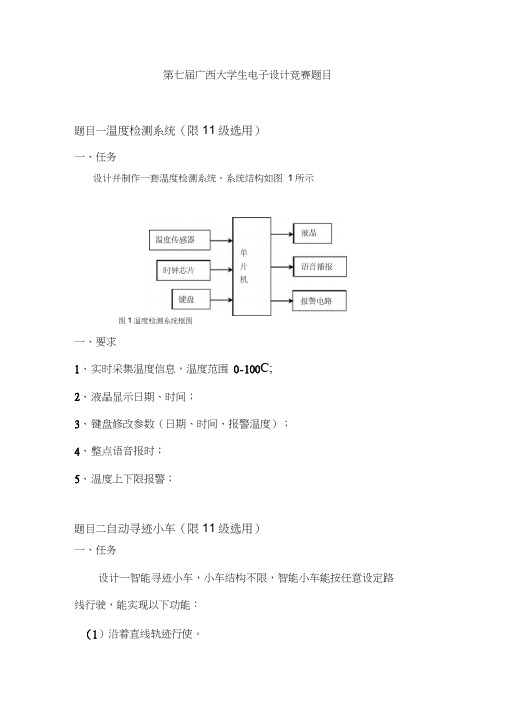
第七届广西大学生电子设计竞赛题目题目一温度检测系统(限11级选用)一、任务设计并制作一套温度检测系统。
系统结构如图1所示图1温度检测系统框图一、要求1、实时采集温度信息,温度范围0-100C;2、液晶显示日期、时间;3、键盘修改参数(日期、时间、报警温度);4、整点语音报时;5、温度上下限报警;题目二自动寻迹小车(限11级选用)一、任务设计一智能寻迹小车,小车结构不限,智能小车能按任意设定路线行驶,能实现以下功能:(1)沿着直线轨迹行使。
(2)沿着S型设定轨迹行使。
起点S形状寻迹(3)沿着任何设置的轨迹行使(4)小车行使到达轨迹终点时,自动停留5秒并发出声光报警之后自动寻迹倒回行使到起点。
(5)沿轨迹行使过程中,检测到障碍物时,自动停止5s,并发出声光报警“请注意倒车”。
题目三:光控流水灯(限12级选用)、任务设计制作一个光控流水灯。
、电路原理图三、电路/芯片/工作原理说明1. 由两个NPN(8050)三极管T1, T2组成自激多谐振荡器,R3,R4是T1,T2的集电极负载电阻,电阻R1,R2分别给T1,T2加以正向偏压。
两个三极管T1,T2经过两个电容C1,C2进行交流耦合。
通电后,电容C1,C2 交替充放电,使T1,T2轮流导通和截止,从T2集电极输出一定频率和一定脉冲宽度的方波。
2. 方波从CD4017的14脚(时钟输入脚)输入,给予连续不断的时钟信号使发光二极管依次不断闪烁。
R5是光敏电阻,入射光越强电阻越小,反之越大。
通过光照可以改变输出方波的频率,从而使LED的闪烁速度改变。
3. 工作时序CD4017I作吋序Cl3Ck____________________________________________________________________________^IRLtrx"TGUT由此可见,当CD4017有连续脉冲输入时,其对应的输出端依次变为高电平状态。
四、注意事项4. 电阻色环的读法,电容如何看大小,芯片如何放置、芯片的一脚如何辨别,三极管管脚的区分。

悬挂运动控制系统(E题)一、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
二、要求1、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
2、发挥部分(1)能够显示物体中画笔所在位置的坐标;(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
三、评分标准项目满分基本要求设计与总结报告:方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50 实际制作完成情况50发挥部分完成第(1)项10 完成第(2)项中连续线段运动14 完成第(2)项中断续线段运动16 其他10四、说明1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定的时间,该项目不得分;3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸)测试时自带。

全国大学生电子竞赛题目答案一、历届竞赛赛题解析第一届(1994年)全国大学生电子设计竞赛题目一、简易数控直流电源二、多路数据采集系统第二届(1995年)全国大学生电子设计竞赛题目一、实用低频功率放大器二、实用信号源的设计和制作三、简易无线电遥控系统四、简易电阻、电容和电感测试仪第三届(1997年)全国大学生电子设计竞赛题目A题直流稳定电源 B题简易数字频率计C题水温控制系统 D题调幅广播收音机*第四届(1999年)全国大学生电子设计竞赛题目A题测量放大器 B题数字式工频有效值多用表C题频率特性测试仪 D题短波调频接收机E题数字化语音存储与回放系统第五届(2001年)全国大学生电子设计竞赛题目A题波形发生器 B题简易数字存储示波器C题自动往返电动小汽车 D题高效率音频功率放大器E题数据采集与传输系统 F题调频收音机第六届(2003年)全国大学生电子设计竞赛题目A题电压控制LC振荡器 B题宽带放大器C题低频数字式相位测量仪 D题简易逻辑分析仪E题简易智能电动车 F题液体点滴速度监控装置第七届(2005年)全国大学生电子设计竞赛题目A题正弦信号发生器 B题集成运放参数测试仪C题简易频谱分析仪 D题单工无线呼叫系统E题悬挂运动控制系统 F题数控直流电流源G题三相正弦波变频电源纵观历届赛题,设计方向大致可以分为四类:(一)功能电路兼控制类系统设计(11项)第一届(1994年)全国大学生电子设计竞赛题目一、简易数控直流电源第二届(1995年)全国大学生电子设计竞赛题目一、实用低频功率放大器二、实用信号源的设计和制作第三届(1997年)全国大学生电子设计竞赛题目A题直流稳定电源第四届(1999年)全国大学生电子设计竞赛题目A题测量放大器第五届(2001年)全国大学生电子设计竞赛题目D题高效率音频功率放大器第六届(2003年)全国大学生电子设计竞赛题目A题电压控制LC振荡器 B题宽带放大器第七届(2005年)全国大学生电子设计竞赛题目A题正弦信号发生器 F题数控直流电流源G题三相正弦波变频电源(二)测量仪器类系统设计(10项)第二届(1995年)全国大学生电子设计竞赛题目四、简易电阻、电容和电感测试仪第三届(1997年)全国大学生电子设计竞赛题目B题简易数字频率计第四届(1999年)全国大学生电子设计竞赛题目B题数字式工频有效值多用表 C题频率特性测试仪第五届(2001年)全国大学生电子设计竞赛题目A题波形发生器 B题简易数字存储示波器第六届(2003年)全国大学生电子设计竞赛题目C题低频数字式相位测量仪 D题简易逻辑分析仪第七届(2005年)全国大学生电子设计竞赛题目B题集成运放参数测试仪 C题简易频谱分析仪(三)通信传输类系统设计(7项)第一届(1994年)全国大学生电子设计竞赛题目二、多路数据采集系统第二届(1995年)全国大学生电子设计竞赛题目三、简易无线电遥控系统第三届(1997年)全国大学生电子设计竞赛题目D题调幅广播收音机*第四届(1999年)全国大学生电子设计竞赛题目D题短波调频接收机第五届(2001年)全国大学生电子设计竞赛题目E题数据采集与传输系统 F题调频收音机第六届(2003年)全国大学生电子设计竞赛题目第七届(2005年)全国大学生电子设计竞赛题目D题单工无线呼叫系统(四)自动控制兼电路类系统设计(6项)第一届(1994年)全国大学生电子设计竞赛题目第二届(1995年)全国大学生电子设计竞赛题目第三届(1997年)全国大学生电子设计竞赛题目C题水温控制系统第四届(1999年)全国大学生电子设计竞赛题目E题数字化语音存储与回放系统第五届(2001年)全国大学生电子设计竞赛题目C题自动往返电动小汽车第六届(2003年)全国大学生电子设计竞赛题目E题简易智能电动车 F题液体点滴速度监控装置第七届(2005年)全国大学生电子设计竞赛题目E题悬挂运动控制系二、电子系统设计一般方法这里我们以2005年全国大学生电子设计竞赛A题目来给大家展开讲解以下。
附件2:江苏师范大学第七届电子设计竞赛试题大一组A题:三角波发生器一、基本任务设计并制作一个三角波发生器。
二、要求1.基本要求(1)频率范围:10Hz~5KHz 。
(频率控制方法自行确定)(2)输出幅度:5V(峰峰值,误差<10%,50Ω负载)。
(3)三角波线性度误差<5%。
(4)输出信号波形无明显失真。
2.发挥部分(1)增加频率显示功能,显示位数4位。
(2)频率步长为5Hz,可连续变化。
(3)其它。
三、评分标准B题:智能小车一、任务设计并制作一个能自动寻找铁片的智能电动车,其工作示意图如图1。
图中,左边为停车区,并有对应的射灯光源;距右边线50 cm 处随机放置1片白色或黑色的薄铁片。
图1二、要求1、基本要求(1)智能车从入口垂直车库边缘出发,在无障碍物的情况下,可寻找铁片,在寻到铁片后有声光提示,并在光源的引导下进入车库。
(2)要求智能车在8 分钟之找到铁片并返回车库,否则就地停车。
2、发挥部分(1)距右边线1m 处设有障碍线,线上任意位置放有一个障碍物,在有障碍物的情况下,完成基本要求(1)、(2)中的相关操作,且不得与障碍物碰撞。
(2)停车后,能准确显示智能车全程行驶的时间,显示误差的绝对值应小于10 秒。
(3)其它。
三、说明1、测试时铁片的厚度为<=2.0mm,面积为2cm×2cm,初始位置任意给定。
2、两个障碍物的大小分别为24cm×6cm×12cm,建议用白纸包砖代替。
3、示意图中所有粗黑线段宽度均为2 cm,制作时可以涂墨或粘黑色胶带。
图中的虚线和尺寸标注线不要绘制在白纸上。
4、智能车允许用玩具车改装,但不能由人工遥控。
5、光源采用200W 射灯,其底部距地面20cm 左右,摆放位置如图所示,测试前,射灯的照射方向允许微调。
四、评分标准C 题:压力检测与报警系统一、任务设计并制作一个压力检测与报警系统。
系统结构如图2所示。
压力传感器输出为直流信号且变化频率小于10HZ ,易受到50HZ 及以上高频信号干扰。
序号课程类别项目名称参赛学校作者拟获奖等级1信号与系统周期信号的分解与合成国防科技大学许可一等奖2信号与系统电力系统交流信号谐波的DFT分析武汉大学严国志一等奖3数字信号处理雷达对无人机的恒虚警率检测国防科技大学杨勇一等奖4数字电路及数字系统基于FPGA的VGA显示实验国防科技大学孙统义一等奖5数字电路及数字系统基于FPGA的超声测距系统设计武汉大学王敏一等奖6数字电路及数字系统基于FPGA的16位 RISC CPU设计信息工程大学董春宵一等奖7数字电路及数字系统千兆网络通信的FPGA设计与实现中南民族大学崔勇强一等奖8模拟电子电路含高频电路多功能智能物流小车的设计桂林电子科技大学黄静月一等奖9模拟电子电路含高频电路LC三点式正弦波振荡器的设计桂林电子科技大学王土央一等奖10模拟电子电路含高频电路带通滤波器的设计武汉大学代永红一等奖11高职高专基于单片机的旋转LCD显示屏设计桂林电子科技大学郭乾一等奖12高职高专基于单片机的语音提示测温控制系统设计济源职业技术学院任艳艳一等奖13电子系统设计(含单片机及微机系统)汉字显示系统的仿真与实物设计湖北大学李璋一等奖14电子系统设计(含单片机及微机系统)基于STM32的平衡小车系统设计湖南工程学院张巧龙一等奖第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)序号课程类别项目名称参赛学校作者拟获奖等级第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)15电子系统设计(含单片机及微机系统)物联网云平台教室智慧节能系统设计湖南文理学院王南兰一等奖16电子系统设计(含单片机及微机系统)嵌入式MIMO控制系统设计华中科技大学左冬红一等奖17电子系统设计(含单片机及微机系统)微型轮式机器人的动力学系统辨识和控制参数整定华中科技大学王贞炎一等奖18电子系统设计(含单片机及微机系统)电能质量分析仪的设计华中科技大学肖波一等奖19电子系统设计(含单片机及微机系统)金属小球磁悬浮计算机控制系统设计武汉大学王泉德一等奖20电子系统设计(含单片机及微机系统)基于单片机的电子时速表和里程表设计长江大学魏勇一等奖21电子电路综合设计(含电子技术)基于模电与数电课程知识的寻迹小车设计桂林航天工业学院朱剑芳一等奖22电子电路综合设计(含电子技术)基本模拟滤波电路河南科技大学史敬灼一等奖23电子电路综合设计(含电子技术)自动调光LED照明控制电路的设计湖北大学张丹一等奖24电子电路综合设计(含电子技术)5G基站覆盖特征评估与盲区消除华中科技大学钟祎一等奖25电子电路综合设计(含电子技术)数控电压调节电路设计深圳技术大学曹建民一等奖1信号与系统非正弦周期信号的分解与合成虚拟仿真实验吉大珠海学院张延生二等奖2数字信号处理基于DSP的永磁直流有刷电机PWM控制方案安阳师范学院邹玉炜二等奖3数字信号处理基于双线性变换的IIR滤波器间接设计及实践长沙理工大学席燕辉二等奖序号课程类别项目名称参赛学校作者拟获奖等级第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)4数字电路及数字系统无刷直流电机驱动逻辑数字电路的设计东莞理工学院唐校二等奖5数字电路及数字系统数字电子技术课程设计广东白云学院曾贵娥二等奖6数字电路及数字系统基于VerilogHDL的VGA驱动设计河池学院邹清平二等奖7数字电路及数字系统多功能电子时钟设计湖北大学知行学院汤莉莉二等奖8数字电路及数字系统同步时序逻辑电路的设计湖北工业大学韦琳二等奖9模拟电子电路含高频电路差动放大器电路设计桂林电子科技大学孟德明二等奖10模拟电子电路含高频电路调频连续波雷达动目标探测实验国防科技大学李悦丽二等奖11高职高专定时器的设计与制作湖南省张家界航空工业职业技龙治红二等奖12高职高专提高感性负载功率因数的电路设计张家界航空工业职业技术学院张璐二等奖13高职高专物料传送与分拣系统安装与调试中山市技师学院冯颜二等奖14电子系统设计(含单片机及微机系统)基于单片机的无线控制电子时钟设计广东白云学院苏康友二等奖15电子系统设计(含单片机及微机系统)8051单片机实时多任务操作系统基本应用国防科技大学于红旗二等奖16电子系统设计(含单片机及微机系统)基于单片机的红外遥控器设计河南科技大学宋潇二等奖17电子系统设计(含单片机及微机系统)基于四旋翼的姿态图像采集系统设计河南理工大学张伟二等奖序号课程类别项目名称参赛学校作者拟获奖等级第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)18电子系统设计(含单片机及微机系统)自动搬运小车的设计贺州学院曾繁政二等奖19电子系统设计(含单片机及微机系统)三相正弦波逆变电源设计荆楚理工学院邓鹏二等奖20电子系统设计(含单片机及微机系统)基于STM32开发板和RFID模块的模拟消费系统深圳大学黄冠龙二等奖21电子系统设计(含单片机及微机系统)基于STM32的写字机器人系统设计武汉理工大学张清勇二等奖22电子系统设计(含单片机及微机系统)便携式人体生理参数检测仪设计中南林业科技大学涉外学院向诚二等奖23电子电路综合设计(含电子技术)自动换挡数字频率计设计海南大学冯尔理二等奖24电子电路综合设计(含电子技术)多功能函数发生器设计与制作河池学院宋华宁二等奖25电子电路综合设计(含电子技术)电子元件实用技术实验河南科技大学张亚楠二等奖26电子电路综合设计(含电子技术)基于驱动--响应同步超混沌保密通信电路设计湖南科技大学于文新二等奖27电子电路综合设计(含电子技术)基于频域的线性控制系统设计与校正实验华中科技大学冯学玲二等奖28电子电路综合设计(含电子技术)应变式电桥性能的验证和应变式电子秤的设计平顶山学院杜豪杰二等奖29电子电路综合设计(含电子技术)一种智能小车的电子综合设计武汉大学赵小红二等奖30电子电路综合设计(含电子技术)单相正弦波逆变电源设计中国地质大学(武汉)赵娟二等奖31电路分析以学生为中心的最大功率传输实验设计湖南科技大学陈君二等奖序号课程类别项目名称参赛学校作者拟获奖等级第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)32电工学声光控电子开关的实现战略支援部队信息工程大学程娟二等奖1信号与系统一级直线倒立摆仿真与控制器设计实验华中科技大学易磊三等奖2信号与系统基于状态空间的线性控制系统反馈校正设计实验华中科技大学吴葛三等奖3信号与系统LTI连续时间系统的时域分析郑州商学院袁英三等奖4数字信号处理音频信号频谱分析及滤波湖北工程学院张升义三等奖5数字信号处理基于图像处理的绝缘子覆冰检测系统设计平顶山学院杨丽三等奖6数字电路及数字系统基于DSP的实时的音频信号干扰抑制系统东莞理工学院林盛鑫三等奖7数字电路及数字系统基于Quartus的可定时多路数显抢答器的设计桂林电子科技大学蔡春晓三等奖8数字电路及数字系统任意M进制计数器设计河南城建学院刘恋三等奖9数字电路及数字系统电话机拨号电路的设计河南科技大学赵显红三等奖10数字电路及数字系统分频器设计深圳技术大学梅逢城三等奖11模拟电子电路含高频电路无线发送系统广州大学郑艳华三等奖12模拟电子电路含高频电路比例求和运算电路及积分与微分电路湖南师范大学兰浩三等奖13高职高专直流稳压电源的设计海南工商职业学院许桂月三等奖序号课程类别项目名称参赛学校作者拟获奖等级第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)14高职高专基于PLC编程的音乐喷泉控制济源职业技术学院吕颖利三等奖15高职高专火花隙特斯拉线圈电路的设计郑州铁路职业技术学院王云飞三等奖16电子系统设计(含单片机及微机系统)基于STM32的智能药盒东莞理工学院赖树明三等奖17电子系统设计(含单片机及微机系统)基于锁相放大器的数字式毫欧表设计广东技术师范大学詹彤三等奖18电子系统设计(含单片机及微机系统)结合EPC/RFID和GPS的多元智能物流溯源系统广东科技学院张龙青三等奖19电子系统设计(含单片机及微机系统)基于单片机的物联网充电桩系统设计广西城市职业大学李其阳三等奖20电子系统设计(含单片机及微机系统)双通道多模式温度测量与控制系统的对比实验设计桂林理工大学严继池三等奖21电子系统设计(含单片机及微机系统)基于单片机的机器人光敏电阻导航设计河池学院徐咏三等奖22电子系统设计(含单片机及微机系统)带进借位输出的六进制加减计数器微程序设计河南科技大学齐晶晶三等奖23电子系统设计(含单片机及微机系统)基于Cortex-M4的温度监控系统设计河南理工大学张宏伟三等奖24电子系统设计(含单片机及微机系统)基于单片机的智能风扇设计湖南科技大学李燕三等奖25电子系统设计(含单片机及微机系统)单片机外部中断实验邵阳学院江世明三等奖26电子系统设计(含单片机及微机系统)沟道智能巡检小车的设计与实现长沙理工大学贾智伟三等奖27电子电路综合设计(含电子技术)二轮平衡小车的设计与实现广东石油化工学院张锋三等奖序号课程类别项目名称参赛学校作者拟获奖等级第七届电工电子基础课程实验教学案例设计竞赛(鼎阳杯)中南分赛区成绩公示(公示期:5.4~5.11)28电子电路综合设计(含电子技术)共射放大电路的故障诊断与优化国防科技大学李德鑫三等奖29电子电路综合设计(含电子技术)基于PLC的电动机多段调速控制河池学院卢森幸三等奖30电子电路综合设计(含电子技术)示波器前置信号处理电路的设计湘南学院段凌飞三等奖31电子电路综合设计(含电子技术)基于PocketLab便携式网络化实验平台的心电信号检测电路设计信息工程大学徐志坚三等奖32电工学小功率直流电机测速装置的设计和测试郑州铁路职业技术学院裴慧霞三等奖。
全国大学生电子设计竞赛试题1.1 第一届电子设计竞赛试题(1994年)题目一 简易数控直流电源一、设计任务设计出有一定输出电压范围和功能的数控电源。
其原理示意图如图所示。
二、设计要求1.基本要求① 输出电压:范围0至+9.9V ,步进0.1V ,纹波不大于10mV ; ② 输出电流:500 mA ;③ 输出电压值由数码管显示; ④ 由“+”、“-”两键分别控制输出电压步进增减;⑤ 为实现上述几部件工作,自制一稳压直流电源,输出±15V ,+5V 。
2.发挥部分① 输出电压可预置在0至+9.9V 之间的任意一个值;② 用自动扫描代替人工按键,实现输出电压变化(步进0.1V 不变); ③ 扩展输出电压种类(比如三角波等)。
题目二 多路数据采集系统一、设计任务主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集和显示。
具体设计任务是:① 现场模拟信号产生器。
② 八路数据采集器。
③ 主控器。
二、设计要求 1.基本要求① 现场模拟信号产生器 自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz 至2kHz 范围变化,再经频率电压娈换电路后输出相应1V 至5V 直流电压(200Hz 对应1V ,2kHz 对应5V )② 八路数据采集器 数据采集器第一路输入自制1V 至5V 直流电压,第2至7路分别输入来自直流源的5,4,3,2,1,0V 直流电压(各路输入可由分压器产生,不要求精度),第八路备用。
将各路模拟信号分别转换成八位二进制数字信号,再经并/串变换电路,用串行码送入传输线路。
③ 主控器 主控器通过串行传输线路对各路数据进行采集和显示。
采集方式包括循环采集(即1路、2路、…、8路、1路…)和选择采集(任选一路)二种方式。
显示部分能同时显示地址和相应的数据。
2.发挥部分① 利用电路补偿或其它方法提高可变电阻值变化与输出直流电压变化的线性关系; ② 尽可能减少传输线数目;③ 其它功能的改进(例如:增加传输距离,改善显示功能等) 三、评分标准1.2 第二届电子设计竞赛试题(1995年)题目一 实用低频功率放大器一、任务设计并制作具有弱信号放大能力的低频功率放大器。
A简易信号跟踪监测仪
一、设计任务
设计制作一个调幅AM信号跟踪监测装置。
被监测的AM信号源幅度可变,频率在一定的范围内连续变化或随机跳变,装置应以最快的速度跟踪捕获到信号,测量并显示出信号参数,解调恢复出基带信号。
二、设计要求
1.基本要求
(1) 信号频率范围:100kHz~1Mhz,最小步进1kHz;
(2) 输入信号幅度:100mV~2Vrms;
(3) 信号跟踪时间:200ms~20S(手动和自动跟踪);
(4) 测量显示出信号的参数:载波频率、带宽;
(5) 解调出基带信号,波形无明显失真。
2.提高部分
(1) 信号频率范围:100kHz~10Mhz,最小步进100Hz;
(2) 输入信号幅度:10mV~2Vrms;
(3) 显示被测信号和解调信号的时域波形。
三、评分标准
总分 50 提高 部分
(1)项
20 (2)项 10 (3)项 20 总分
50
四、说明
信号源由函数发生器产生,也可自制。
信号的手动跟踪是指信号源先随机设定好一个信号后,用按键启动搜索,直到显示检测出该信号。
自动跟踪是指在已跟踪到一个信号的情况下,改变信号源频率,仪器会自动跟踪检测出新信号。
B 数字信号传输性能分析仪
一、设计任务
设计一个简易数字信号传输性能分析仪,实现数字信号传输性能测试;同时,设计三个低通滤波器和一个伪随机信号发生器用来模拟传输信道。
简易数字信号传输性能分析仪的框图如图1所示。
图中,V1和V1-clock 是数字信号发生器产生的数字信号和相应的时钟信号;V2是经过滤波器滤波后的输出信号;V3是伪随机信号发生器产生的伪随机信号;V2a 是V2信号与经过电容C 的V3信号之和,作为数字信号分析电路的输入信号;V4和V4-syn 是数字信号分析电路输出的信号和提取的同步信号。
图1 简易数字信号传输性能分析仪框图
二、设计要求
1、基本要求
(1)设计并制作一个数字信号发生器:
a) 数字信号V1为()8
43211x x x x x f ++++=的m 序列,其时钟信号为
clock V -1;
b) 数据率为10~100kbps ,按10kbps 步进可调。
数据率误差绝对值不大于1%;
c) 输出信号为TTL 电平。
(2)设计三个低通滤波器,用来模拟传输信道的幅频特性: a) 每个滤波器带外衰减不少于40dB/十倍频程;
b) 三个滤波器的截止频率分别为100kHz 、200kHz 、500kHz ,截止频率误差绝对值不大于10%;
c) 滤波器的通带增益AF 在0.2~4.0范围内可调。
2、发挥部分
(1) 设计一个伪随机信号发生器用来模拟信道噪声:
a) 伪随机信号V3为()12
5421x x x x x f ++++=的m 序列;
b) 数据率为10Mbps ,误差绝对值不大于1%;
c) 输出信号V3幅度可调,V3的峰峰值范围为100mV~TTL 电平。
(2) 利用数字信号发生器产生的时钟信号 V1-clock 进行同步,显示数字信号V2a 的信号眼图,并测试眼幅度。
(3) 要求数字信号分析电路能从V2a 中提取同步信号V4-syn 并输出;同时,利用所提取的同步信号V4-syn 进行同步,正确显示数字信号V2a 的信号眼图。
(4) 其他。
三、说明
1、在完成发挥部分(2)时,数字信号发生器的时钟信号V1-clock 送给数字信号分析电路(图1中开关S 闭合);而在完成发挥部分(3)时,V1-clock 不允许送给数字信号分析电路(开关S 断开)。
2、要求数字信号发生器和数字信号分析电路各自制作一块电路板。
3、要求V1、V1-clock 、V2、V2a 、V3和V4-syn 信号预留测试端口。
4、对于两个m 序列,根据所给定的特征多项式f1(x)和f2(x),采用线性移位寄存器发生器来产生。
5、基本要求(2)的低通滤波器要求使用模拟电路实现。
6、眼图显示可以使用示波器,也可以使用自制的显示装置。
C 高性能三态逻辑测试笔
一、设计任务
设计制作一个高性能的三态逻辑测试笔的,能测量指示TTL ,COMS 高低电平,高阻,脉动信号。
二、设计要求
1.基本要求
(1) 测量指示高低电平信号 (2) 测量指示高阻状态 (3) 测量指示短脉冲信号 (4) 检测端输入高阻抗 (5) 体积小
2.提高部分
(1) 电压高低显示
(2) 具有脉冲发生器功能
(3) 声音提示
三、评分标准
D题目低功率放大器设计
一、设计任务
设计制作一个5V单电源供电的宽带低噪声放大器,输出为30Ω阻性负载。
二、设计要求
1.基本要求
(1) 建议采用高速运算放大器OPA820ID作为第一级放大电路,THS3091D 作为末级放大电路,利用DC-DC变换器TPS61087DRC为末级放大电路供电;
(2) 放大器电压增益≧40dB(100倍),并尽量减小带内波动;
(3) 在最大增益下,放大器下限截止频率不高于50Hz,上限截止频率不低于1MHz;
(4) 在输出负载上,放大器最大不失真输出电压峰峰值≥10V。
2.发挥部分
(1) 在达到40dB电压增益的基础上,提高放大器上限截止频率,使之不低于5MHz;
(2) 尽可能降低放大器的输出噪声;
(3) 放大器输入为正弦波时,可测量并数字显示放大器输出电压的峰峰值和有效值,输出电压(峰峰值)测量范围为0.5~10V,测量相对误差小于10%;
三、说明
1.也可以采用其他的放大器设计方案,但不能直接使用外购的解决模块。
2.系统应该具备一定的稳定性,焊接工艺也要作为考核的一部分。
四、评分标准
E设计制作小功率无线对讲机
一、设计任务
设计制作小功率无线对讲机。
二、设计要求
1.基本要求
(1) 输出功率P>0.25W,R
=8Ω;
L
(2) 中心频率88~108MHZ中的任一频率,最大频偏0.5MHZ ;
(3) 接收距离:100米以上,接收语音清晰,无失真、噪声小;
(4) 制作出实物,通过调试后能实现语音发送和接收功能。
2.发挥部分
(1) 能有多个频率点选择进行通讯;.
(2) 带显示、录音等辅助功能;
(3) 采取措施保证高音质和抗干扰。
三、说明
1.设计小功率无线对讲机的工作原理图及安装图;
2.采用5号或7号电池供电。
四、评分标准
F语音通讯系统
一、设计任务
设计具有语音录制和播放功能的zigbee无线通讯系统。
二、设计要求
1、基本要求
(1)设计一个能实现语音录制和播放功能的语音节点;
(2)语音的录制和播放由按键控制;
(3)支持回放10条以上的历史语音信息;
(4)采用两节1.5V干电池串联供电。
2、发挥部分
(1)增加一个语音节点;
(2)两个语音节点之间能发起双向无线语音通讯;
(3)无线通讯距离10米以上,时间延时在10秒以内;
(4)接收的语音节点能保留语音信息,并能随时回放;
(5)其他创新。
三、评分标准
G电炉温度控制器设计
一、设计任务
设计并制作一个电炉温度控制器,采用单片机系统控制电炉温度按照预定的规律变化。
二、设计要求
1.基本要求
(1) 在保温区间的温度误差控制在1%以内。
(2) 实际升温时间与设定值误差在5%以内。
(3) 通过键盘输入设定温度、升温时间和保温时间
(4) 用LED或液晶屏显示设定温度和实际温度。
2.提高部分
(1) 在保温区间的温度误差控制在0.5%以内。
(2) 实际升温时间与设定值误差在2%以内。
(3) 可设定升温曲线,实现多个升温和保温区间。
(4) 具有报警功能。
三、评分标准
四、说明
1.不得采用现成的PID控制器模块。
H数控直流电流源
一、设计任务
设计并制作数控直流电流源。
输入交流200~240V,50Hz;输出直流电压≤10V。
其原理示意图如下所示。
二、设计要求
1.基本要求
(1)输出电流范围: 0~20mA;
(2)可设置并显示输出电流给定值,要求输出电流与给定值偏差的绝对值≤给定值的1%±1 mA;
(3)对任一电流设定值,输出电压变化时,输出电流变化的绝对值≤输出电流值的1%±1 mA;
(4)可设置电流按梯度连续输出,
梯度高度可调,范围:0.2mA~2mA;
梯度宽度自定;
(5)自制电源。
2.提高部分
(1)对任一电流设定值,输出电压变化时,输出电流变化的绝对值≤输出电流值的0.1% 0.1 mA;
(2)输出电流梯度可程序控制,即电流大小按程序阶梯输出;
(3)有输出过流、短路保护;
(4)可带串口输出电流、电压数据。
(5)其他。
三、评分标准
总分50
四、说明
1、需留出输出电流和电压测量端子;
2、负载为发光二极管。