机床上下料装置
- 格式:ppt
- 大小:23.63 MB
- 文档页数:54
车床自动化上下料操作规程
《车床自动化上下料操作规程》
一、操作概述
车床自动化上下料操作是指通过自动化装置将工件放置于车床上进行加工,并在加工完成后将工件取下的工序。
此规程适用于车床自动化生产线。
二、操作流程
1. 开启车床自动化装置,并进行必要的预热和设定操作。
2. 将待加工的工件按照规定的方式放置在物料上料区域内,并确保工件放置正确。
3. 启动自动化装置,使其将工件取出并放置在车床上。
4. 车床完成加工后,自动化装置将工件取下并放置在物料下料区域内。
5. 关闭自动化装置,并进行必要的清洁和维护作业。
三、操作注意事项
1. 操作人员必须经过专业培训,并持证上岗。
2. 在操作过程中,应严格按照操作规程和安全操作流程进行操作,禁止随意更改设定参数和程序。
3. 在物料上下料区域内,严禁其他无关人员进入,确保操作安全。
4. 操作人员应定期对自动化装置进行检查和维护,确保其正常运行。
5. 在操作过程中如发现异常情况,应立即停止操作并向相关部门报告。
四、操作总结
车床自动化上下料操作规程是车床自动化生产线操作的基本规范,操作人员应严格遵守,确保生产线安全、高效运行。
同时,不断总结经验、改进操作流程,提高生产效率和产品质量。
自动化技术与应用今 日 自 动 化Automation technology and ApplicationAutomation Today94 | 2021.8 今日自动化2021年第8期2021 No.8研究铣床自动上下料系统的远程自动控制方法,对于优化铣床自动上下料系统的设计,提高铣床自动上下料控制指令性能具有重要意义。
铣床自动上下料系统远程自动控制的核心在于铣床自动上下料系统机械部件的自动控制设计。
根据铣床自动上下料系统的激励和输出性能,进行参数自适应匹配,根据铣床自动上下料系统的激励特性,建立了铣床自动上下料系统,提高铣床上下料自动化系统的远程控制能力。
1 系统总体设计框架及功能模块分析基于工业机器人的铣床自动上下料单元实现了物品在铣床与货仓之间的双向传递,该单元由两部分组成。
智能立体仓库系统根据系统的指令,将装在仓库的物品转移到验证系统的装载位置。
装载机器人将物品从仓库运送到铣床。
本文研究了机器人装卸单元的作业效率,采用协调优化模型对机器人装卸任务分配进行了改进。
创新的设计使夹持装置满足了自动检定系统中机器人装卸单元的操作要求,提高了装卸环节的效率。
基于此得到了基于工业机器人的铣床自动上下料系统的总体设计框架,如图1所示。
开始倍数链送料自动状态机器人夹取毛坯毛坯放置卡盘机器人取料机器人退出机器人放料至托盘铣床自动门关铣床发出加工完成信号卡盘夹紧,开始加工铣床处于重新待加工状态发送取料完成信号发送门开信号检测工件到位检测入库到位发送入库完成信号加工成品入库完成图1 总体设计框架2 铣床上下料自动化系统的硬件设计2.1 硬件配置机器人装卸单元包括两台ABB IRB1410六自由度关节机器人,展开半径为1.65 m ,重复位置误差在0.05 mm 以内。
机械臂的重量限制为10 kg——机械臂的前端装有机械手的夹持装置,可根据实际夹持物体的需要进行重新放置。
最高的运动速率可以满足自动检定的要求。
第1章绪论1.1 选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC 中一个重要组成部分。
把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。
而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
因此,进行机械手的研究设计是非常有意义的。
1.2 设计目的本设计通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,完成一个特定功能、特殊要求的数控机床上下料机械手的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。
为了提高生产加工的工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,利用机器人技术,设计用一台装卸机械手代替人工工作,以提高劳动生产率。
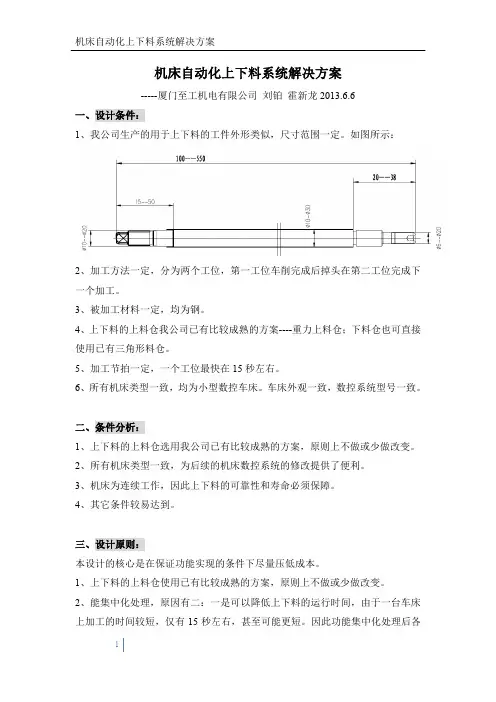
机床自动化上下料系统解决方案-----厦门至工机电有限公司刘铂霍新龙2013.6.6一、设计条件:1、我公司生产的用于上下料的工件外形类似,尺寸范围一定。
如图所示:2、加工方法一定,分为两个工位,第一工位车削完成后掉头在第二工位完成下一个加工。
3、被加工材料一定,均为钢。
4、上下料的上料仓我公司已有比较成熟的方案----重力上料仓;下料仓也可直接使用已有三角形料仓。
5、加工节拍一定,一个工位最快在15秒左右。
6、所有机床类型一致,均为小型数控车床。
车床外观一致,数控系统型号一致。
二、条件分析:1、上下料的上料仓选用我公司已有比较成熟的方案,原则上不做或少做改变。
2、所有机床类型一致,为后续的机床数控系统的修改提供了便利。
3、机床为连续工作,因此上下料的可靠性和寿命必须保障。
4、其它条件较易达到。
三、设计原则:本设计的核心是在保证功能实现的条件下尽量压低成本。
1、上下料的上料仓使用已有比较成熟的方案,原则上不做或少做改变。
2、能集中化处理,原因有二:一是可以降低上下料的运行时间,由于一台车床上加工的时间较短,仅有15秒左右,甚至可能更短。
因此功能集中化处理后各功能实现的时间重叠;二是功能集中,可以减少空间占用,起到降低成本的目的。
四、方案解释:1、整体布局:如下图所示,这样的整体布局可以达到桁架行程最短。
取放料集中等优点(图中所示料仓为概念示意图,不代表实物。
)。
2、料仓:我公司在长期的生产中使用的重力上料仓和成品料仓基本符合工厂的实际情况。
因此原则上依然使用这种料仓,尽在必要时对此料仓进行适应新型自动上下料系统的改动。
3、桁架:如图所示:导轨机械部分分为三部分,即支柱、水平导轨和垂直导轨。
水平导轨长4000,垂直导轨视机床工作台高度决定,约1500。
支柱高2000。
具体尺寸以产品为准。
移动速度为120m/s。
根据我们多年的经验,水平导轨和垂直导轨基材选用钢材。
不用国产铝型材的原因是铝型材在挤压成型过程中不可避免的有内应力产生,放置一段时间后会出现扭曲变形。
专题描导自动化上下料系统的设计*□林建兵眉山职业技术学院四川眉山620010摘要:针对某企业数控机床加工法兰产品,设计了自动化上下料系统。
介绍了这一自动化上下料系统的供料装置、传输系统、装夹系统,给出了工作流程,并进行了生产验证。
这一自动化上下料系统可靠性好,实现了机床的连续加工,并在一定程度上提高了生产效率与产品稳定性,为中小微制造企业实施升级提供了参考。
关键词:自动化上料下料系统设计中图分类号:TH165 文献标志码:A文章编号=1000-4998(2021)01 -0001 -04Abstract :An automatic loading and unloading system was designed in a company for processing of the flange product by CNC machine tool.The feeding device,transmission system,and clamping system of this automatic loading and unloading system were introduced,the work flow was given,and the production verification was carried out.This automatic loading and unloading system,featuring good reliability,realizes continuous processing of machine tools,improves production efficiency and product stability to a certain extent, and providing a reference for small,medium and micro manufacturing enterprises to implement upgrades.Keywords : Automation Loading Unloading System Design1设计背景“中国制造2025”提出智能制造是五大核心工程之一,装备制造企业要紧密围绕制造领域关键环节,充分集成信息技术,开发智能产品和自主可控的智能装置,紧扣关键工序智能化、关键岗位机器换人、生产过程智能优化控制,建设智能工厂与数字化车间,实现产业升级,技术进步。
数控机床上下料机械手设计背景介绍随着工业化程度的不断提升,自动化生产设备越来越普及。
数控机床已成为现代工业生产中的重要设备之一。
在数控机床生产制造过程中,上下料机械手是数控机床最核心的装置之一。
数控机床上下料的机械手是现代工业生产中提高生产效率的重要方法之一。
如何设计一种高效的数控机床上下料机械手成为一个热门的研究方向。
设计目标本文主要研究设计一种高效的数控机床上下料机械手。
我们希望设计出的机械手具有以下一些目标:•精准度高:机械手在匀速运动时应保证其精度,以避免出现工件质量不良的现象。
•稳定性好:机械手的运动应该保持稳定,避免产生摆动和震动的现象。
•具有大范围的移动:机械手应该能够在数控机床工作区域内进行水平和垂直的移动。
•适应性强:机械手应该能够适应多种工件的上下料,即机械手可以精准地完成多个工件的上下料作业。
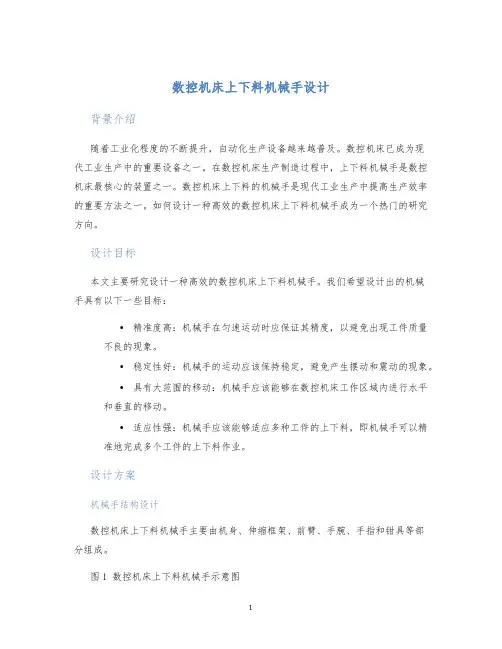
设计方案机械手结构设计数控机床上下料机械手主要由机身、伸缩框架、前臂、手腕、手指和钳具等部分组成。
图1 数控机床上下料机械手示意图为了实现机械手的稳定性和精度,我们采用了传统的寻心旋运动、伸缩式平行机构和牵引式链条平台。
伸缩式平行机构是机械手的运动基础。
在伸缩式平行机构中,机械手平台的移动距离是由伸缩臂控制的。
同时,为了确保机械手的稳定性,在机械手的移动过程中,伸缩臂应具有平衡能力,以确保其稳定性。
传统寻心旋转运动主要用于控制机械手的平台旋转。
在传统寻心旋转运动的过程中,机械手平台的旋转只围绕其寻心旋转中心进行,并且以恒定的线速度旋转。
牵引式链条平台主要用户控制机械手的前臂运动。
在牵引式链条平台中,机械手前臂通过链条进行移动,而牵引式链条平台由导杆控制。
在这种设计方案中,牵引式链条平台的运动可以控制机械手的高度。
图2 伸缩式平行机构示意图机械手控制系统设计基于单片机,我们设计了一套高效的数控机床上下料机械手控制系统。
该系统主要由控制系统、采集系统、运动控制卡以及人机界面等部分组成。
其中的控制系统可以控制机械手的不同工作状态,采集系统可以采集机械手的运动数据,而运动控制卡可以控制机械手的运动。
![数控机床自动上下料夹紧装置[实用新型专利]](https://uimg.taocdn.com/f576728d9b6648d7c0c7468a.webp)
专利名称:数控机床自动上下料夹紧装置专利类型:实用新型专利
发明人:杨军
申请号:CN202020393628.3
申请日:20200324
公开号:CN211708780U
公开日:
20201020
专利内容由知识产权出版社提供
摘要:本实用新型公开了数控机床自动上下料夹紧装置,包括底座,所述底座顶部的左侧焊接有支撑块,所述支撑块的前侧安装有电机,所述电机的输出轴贯穿至支撑块的后侧并固定连接有转杆一,所述转杆一后侧的底部转动连接有转杆二。
本实用新型通过开启电机,电机通过转杆二和滑板的配合使用,使支撑杆可以上下运动,气爪对工件夹紧,即可达到方便上下料和夹紧的目的,该数控机床自动上下料夹紧装置,具备方便上下料和夹紧的优点,解决了在用数控机床加工材料时,大多都是工人进行上下料,操作费时费力,导致生产率降低和成品率降低,目前也有些数控机床上下料装置,没有对材料进行限位,有可能会导致材料的损坏,浪费材料的问题。
申请人:深圳市创特科技有限公司
地址:518000 广东省深圳市龙华区大浪街道浪口社区浪口工业园26栋1、2、4楼
国籍:CN
代理机构:北京化育知识产权代理有限公司
代理人:尹均利
更多信息请下载全文后查看。