国外深海无人潜航器装备及技术发展研究
- 格式:pdf
- 大小:952.50 KB
- 文档页数:7
海洋测绘服务中的无人船技术在海洋勘测中的应用研究随着科技的不断进步,海洋测绘服务中的无人船技术在海洋勘测中发挥着越来越重要的作用。
无人船技术的广泛应用为海洋勘测提供了更多的便利和可能性。
本文将探讨无人船技术的特点、优势以及在海洋勘测中的应用研究。
首先,我们将介绍无人船技术的特点。
无人船是一种无人驾驶的船只,它通过搭载各种传感器和设备,利用自主导航系统来执行特定的任务。
与传统的有人船相比,无人船具有以下几个显著特点。
首先,无人船可以有效地减少人力资源的需求,从而降低相关成本。
其次,无人船可以长时间持续工作,不受人的疲劳和工作时间限制。
此外,无人船还可以在恶劣的海洋环境中工作,例如恶劣的天气条件或海洋深海等。
由于这些特点,无人船技术在海洋测绘服务中具有广阔的应用前景。
其次,我们将探讨无人船技术在海洋勘测中的应用研究。
无人船技术在海洋测绘服务中的应用可以分为以下几个方面。
首先是海洋地形测绘。
无人船搭载了各种传感器,如声纳和测深仪等,可以精确地测量海洋地形和海洋的深度。
这些数据对于海洋资源的开发利用和海洋环境的保护至关重要。
无人船的自主导航系统和良好的机动性能可以确保测绘数据的准确性和全面性。
第二是海洋生物调查。
无人船技术可以搭载各种生物传感器和摄像设备,用于监测海洋生物的种类、数量和分布等。
这些数据对于海洋生态系统的研究和保护具有重要意义。
无人船的自主性和灵活性使其能够深入到海洋中不易到达的区域进行生物调查,为科学家提供宝贵的数据。
第三是海洋环境监测。
无人船技术可以用于监测海洋中的水质、海洋污染物和海洋气候等环境因素。
通过搭载各种传感器和设备,无人船可以实时监测环境数据,并将数据传输回地面控制中心进行分析和处理。
这些数据对于环境保护和自然灾害预警具有重要意义。
最后,我们将分析无人船技术在海洋测绘中的优势。
相比传统的有人船勘测,无人船具有以下几个显著的优势。
首先,无人船可以降低勘测成本,减少人力资源的需求。

深海勘探技术的发展与展望随着人类的科技不断发展,深海勘探的技术也不断更新。
从初期的使用潜水器进行勘探,到今天的无人潜航器、遥控器和机器人。
技术的提高让人们对于深海的探索更加深入。
本文将探讨深海勘探技术的发展和未来展望。
一、深海勘探技术的历史在过去的20世纪初,人们对于深海的了解非常有限。
只有那些经过长期的探险才能对深海的情况有一定了解。
随着科技的不断发展,深海勘探技术也逐渐发展起来。
20世纪初,投入深海勘探的潜水器通常是由人驾驶的,潜水器很重,深入水底十分困难。
到了20世纪50年代,随着技术的提升,人们开始使用具有自行运动能力的潜水器,也就是无人潜水器,用于深海勘探。
到了20世纪60年代,深入水底大约5000米的深海潜艇“特里贝号”开始在深海中运行。
这个时期的潜艇通常大型而重量巨大。
因此,一般需要使用浮起液体的潜水物品,以减少潜艇的重量。
70年代中期,深入水底大约7000米的高海压容器LBS-VP开始使用鱼雷推进器作为潜水器,人们从此能够深入海底更远并进行更多的探索。
90年代开始,摆脱传统人驾驶的深海勘探技术开始了崭新的发展时期,从有无人驾驶的深度潜水器开始,更加智能化的胶囊深潜器也出现在人们的眼前。
直到今天,深海勘探技术已经取得了长足的进步。
配备了丰富内部设施和测量仪器,不仅能够进行标准化的采样和分析,甚至还能在深海中发现新的物种。
二、深海勘探技术的现状现在,深海勘探技术的最新成果是无人潜航器/海洋机器人。
深海无人潜航器是指被船只控制的一个自主型无人遥控器机器人,它不仅可以自主实施样品采集、水文学和地形学勘测、摄像和图像记录等勘探任务,而且还能够高效地完成立体测绘、施工、修建、运输氧气等一系列的工作。
该机器人系统采用自主型的技术、通信系统和自主式传输系统,能够合理地调配各种传感器和控制系统,从而实现自主进行深海勘探。
另外,现在深海勘探技术也已经涉及到了资源勘探。
经过深海勘探,物理地球勘探和岩石学勘探,人们逐渐找到了深海中的矿产资源。
深海探测器的自主导航技术与应用研究与分析在人类探索海洋的进程中,深海探测器扮演着至关重要的角色。
随着科技的不断进步,深海探测器的自主导航技术也取得了显著的发展,为我们深入了解神秘的深海世界提供了有力的支持。
深海环境极为复杂和恶劣,压力巨大、温度极低、光线微弱,这给深海探测器的导航带来了巨大的挑战。
在这样的环境下,传统的导航方法往往难以奏效,因此,发展先进的自主导航技术成为了必然的选择。
目前,常见的深海探测器自主导航技术主要包括惯性导航、声学导航、地球物理场导航以及组合导航等。
惯性导航是一种不依赖外部信息的自主导航方式,通过测量探测器的加速度和角速度来推算其位置和姿态。
然而,惯性导航存在误差积累的问题,长时间工作后精度会逐渐降低。
声学导航则是利用声波在海水中的传播特性来实现导航。
例如,长基线声学导航系统通过在海底布设多个声学基站,探测器接收基站发射的信号来确定自身位置。
这种导航方式精度较高,但系统复杂,成本昂贵,而且容易受到海洋环境噪声的干扰。
地球物理场导航是基于海洋中地球物理场的特征来进行导航,如地磁场、重力场等。
这种导航方式具有自主性强、隐蔽性好等优点,但地球物理场的测量精度和模型精度对导航效果有较大影响。
为了克服单一导航技术的局限性,组合导航技术应运而生。
将惯性导航与声学导航、地球物理场导航等相结合,可以充分发挥各种导航技术的优势,提高导航系统的精度和可靠性。
深海探测器自主导航技术的应用领域非常广泛。
在海洋科学研究方面,它能够帮助科学家精确地测量海洋物理、化学和生物等参数,深入了解海洋的生态系统和气候变化。
例如,通过自主导航,探测器可以按照预定的轨迹采集不同深度的水样,分析其中的化学成分和微生物群落,为研究海洋的物质循环和生态平衡提供重要的数据。
在资源勘探方面,深海蕴含着丰富的矿产资源和能源,如石油、天然气、锰结核等。
深海探测器的自主导航技术可以使勘探设备准确地到达目标区域,进行高效的资源探测和评估。
2024年无人潜航器市场调研报告1. 引言无人潜航器是一种能够在水下环境中独立工作的设备,通过搭载各类传感器和执行器,实现对水下目标的勘测、观测和采样等任务。
近年来,无人潜航器在海洋资源勘测、海洋环境监测和水下考古等领域得到广泛应用。
本报告旨在对无人潜航器市场进行调研,并分析其发展趋势和商机。
2. 市场概况无人潜航器市场呈现快速增长的态势。
目前,该市场主要由航母潜航器和自主潜航器两大类产品组成。
航母潜航器一般由海洋科研机构或大型企业独立研制,并在特定任务中使用。
自主潜航器则是指由多个小型潜航器组成的网络,能够进行协同工作。
自主潜航器市场增长迅猛,受到越来越多领域的关注。
3. 市场驱动因素3.1 技术进步无人潜航器的迅猛发展得益于技术的不断进步。
随着传感器、通信和导航技术的提升,无人潜航器具备更高的自主能力和数据处理能力,能够在复杂水下环境中开展更加复杂的任务。
3.2 海洋资源勘测需求随着人类对海洋资源的需求不断增加,海洋资源勘测成为重要的任务。
无人潜航器能够深入水下环境,对海底地形、生物资源和海洋矿产进行调查,为海洋资源的开发提供重要的数据支持。
3.3 环境监测需求为了保护海洋生态环境,对海洋环境进行实时监测显得尤为重要。
无人潜航器能够搭载各类传感器,对水下环境参数进行监测,提供有关海洋环境状况的数据,为环境保护提供科学依据。
4. 市场竞争格局目前,无人潜航器市场竞争激烈,主要供应商包括国际知名企业和本土企业。
国际知名企业凭借先进的技术和规模经济优势,占据市场的主要份额。
本土企业则通过技术创新和服务质量的提升,逐渐蚕食国际竞争对手的市场份额。
4.1 国际知名企业国际知名企业在无人潜航器市场具有较强竞争力,例如美国的Bluefin Robotics、法国的iXblue、德国的Schilling Robotics等。
这些企业在技术研发、产品质量和市场拓展方面处于领先地位。
4.2 本土企业中国无人潜航器市场的本土企业也逐渐崭露头角。
水下通信技术综述随着科技的不断发展,水下通信技术也日益受到。
水下环境具有特殊的挑战,包括低能见度、高压力、温度变化、盐度等等,这些因素都对通信技术提出了更高的要求。
本文将综述水下通信技术的发展历程、现状以及未来的趋势。
一、水下通信技术发展历程水下通信技术的发展可以追溯到20世纪初期,当时主要是通过水下无线电波来进行通信。
然而,由于水下环境的复杂性和不确定性,早期的水下通信技术存在着许多困难。
随着技术的不断进步,水下通信技术也在不断发展。
进入21世纪以来,水下通信技术取得了显著的进步。
其中,水下机器人(AUV)和自主水下航行器(AUV)的发展,为水下通信技术的发展提供了新的机遇。
二、水下通信技术现状目前,水下通信技术主要有以下几种:1、水下无线电通信水下无线电通信是早期水下通信的主要方式,其优点是传输距离远,但存在着信号衰减严重、稳定性差等问题。
为了提高通信稳定性,研究人员开发出了许多无线电通信协议,比如TCP/IP、UDP等。
2、水下声学通信水下声学通信是一种利用声波进行通信的方式,其优点是传输距离较远、信号衰减小、稳定性较好。
但缺点是受到水温、盐度、压力等多种因素的影响,通信质量不稳定。
3、水下光学通信水下光学通信是一种利用光波进行通信的方式,其优点是传输速度快、带宽大、安全性高。
但缺点是受到水中的能见度、悬浮物、压力等多种因素的影响,通信距离和稳定性有限。
4、水下超短波通信水下超短波通信是一种利用超短波进行通信的方式,其优点是传输距离远、信号衰减小、稳定性较好。
但缺点是频段较为紧张,带宽有限。
三、水下通信技术未来趋势未来水下通信技术的发展,将主要集中在以下几个方面:1、高性能传感器和设备的开发随着水下机器人和自主水下航行器的广泛应用,对于高性能传感器和设备的开发将成为一个重要的方向。
这些设备需要具有更高的精度、更低的能耗以及更强的数据处理能力。
2、水下物联网的普及和发展水下物联网是将物联网技术应用到水下环境中,实现水下设备的互联互通和智能化管理。
我国深海自主水下机器人的研究现状一、本文概述随着科技的飞速发展,深海探索已成为人类认识地球、拓展生存空间、开发资源的重要领域。
深海自主水下机器人(AUV)作为深海探索的核心装备,其技术水平直接决定了我国在深海资源开发、深海科学研究、海洋环境监测等领域的竞争力。
本文旨在全面梳理我国深海自主水下机器人的研究现状,分析存在的问题和挑战,并展望未来的发展趋势,以期为推动我国深海自主水下机器人技术的进一步发展提供参考和借鉴。
本文将首先回顾深海自主水下机器人的发展历程,阐述其在我国海洋战略中的重要地位。
接着,将从设计制造、导航定位、智能感知与控制等方面,详细介绍我国深海自主水下机器人的技术现状,以及在国际上的地位和影响力。
在此基础上,本文将深入探讨我国在深海自主水下机器人技术研究中面临的主要问题和挑战,包括核心技术瓶颈、关键部件依赖进口、研发周期长、经费投入不足等。
本文将对未来深海自主水下机器人技术的发展趋势进行展望,提出针对性的建议,以期为我国深海自主水下机器人技术的持续创新和发展提供有益的参考。
二、深海自主水下机器人技术概述深海自主水下机器人(AUV,Autonomous Underwater Vehicle)是海洋工程技术与机器人技术相结合的产物,具有高度的自主性,能够在无人操控的情况下,独立完成复杂的海洋环境探测、海底地形测绘、海洋资源勘探等任务。
我国深海自主水下机器人的研究,经过多年的积累和发展,已经取得了一系列显著的成果。
在硬件设计方面,我国的深海AUV已经具备了较高的耐压性、稳定性和续航能力。
许多型号的AUV采用了先进的复合材料和轻量化设计,有效减轻了机体的重量,提高了其在深海环境中的机动性和灵活性。
同时,AUV的推进系统也经过了优化设计,能够在各种复杂的海洋环境中稳定运行,保证了探测任务的顺利完成。
在软件与控制系统方面,我国的深海AUV已经实现了较高的智能化水平。
通过搭载先进的导航、定位和控制系统,AUV能够自主完成路径规划、避障、目标跟踪等任务。
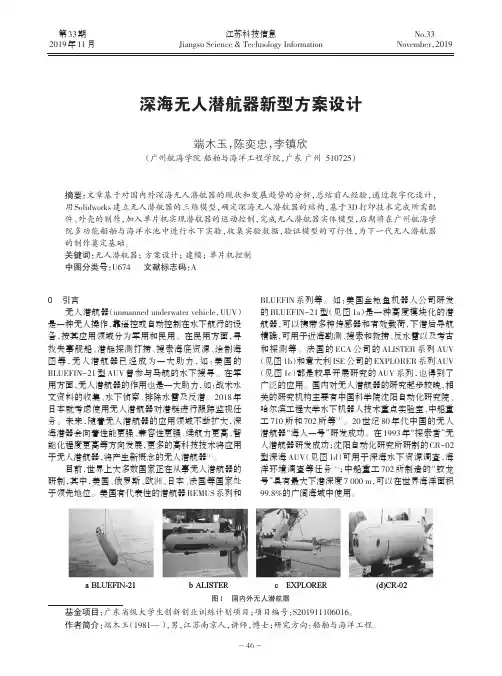
第33期2019年11月No.33November ,2019深海无人潜航器新型方案设计摘要:文章基于对国内外深海无人潜航器的现状和发展趋势的分析,总结前人经验,通过数字化设计,用Solidworks 建立无人潜航器的三维模型,确定深海无人潜航器的结构,基于3D 打印技术完成所需配件、外壳的制作,加入单片机实现潜航器的运动控制,完成无人潜航器实体模型,后期将在广州航海学院多功能船舶与海洋水池中进行水下实验,收集实验数据,验证模型的可行性,为下一代无人潜航器的制作奠定基础。
关键词:无人潜航器;方案设计;建模;单片机控制中图分类号:U674文献标志码:A江苏科技信息Jiangsu Science &Technology Information端木玉,陈奕忠,李镇欣(广州航海学院船舶与海洋工程学院,广东广州510725)基金项目:广东省级大学生创新创业训练计划项目;项目编号:S201911106016。
作者简介:端木玉(1981—),男,江苏南京人,讲师,博士;研究方向:船舶与海洋工程。
引言无人潜航器(unmanned underwater vehicle ,UUV )是一种无人操作,靠遥控或自动控制在水下航行的设备,按其应用领域分为军用和民用。
在民用方面,寻找失事舰船、潜艇探测打捞、搜索海底资源、绘制海图等,无人潜航器已经成为一大助力,如:美国的BLUEFIN-21型AUV 曾参与马航的水下搜寻。
在军用方面,无人潜航器的作用也是一大助力,如:战术水文资料的收集、水下侦察、排除水雷及反潜。
2018年日本就考虑使用无人潜航器对潜艇进行跟踪监视任务。
未来,随着无人潜航器的应用领域不断扩大,深海潜器会向着性能更强、兼容性更强、续航力更高、智能化程度更高等方向发展,更多的高科技技术将应用于无人潜航器,将产生新概念的无人潜航器[1]。
目前,世界上大多数国家正在从事无人潜航器的研制,其中,美国、俄罗斯、欧洲、日本、法国等国家处于领先地位。
-60-科学技术创新2019.02无人船发展现状及其关键技术综述陈映彬(广东海洋大学海洋工程学院,广东湛江524088)摘要:随着通信技术、传感器以及人工智能等的迅速发展,无人船已进入快速发展阶段〉本文阐述了无人船发展背景,介绍了当今国内外无人船发展现状以及无人船环境感知与目标识别、数据计算与航线规划、运动控制与集群智能等方面的关键技术.关键词:无人船;现状;关键技术中图分类号:U674文献标识码:A文章编号:2096-4390(2019)02-0060-02近年来,无人汽车与无人飞机的发展逐渐使得无人船出现在人们的视野。
无人船在军用和民用等领域都发挥着巨大作用,在军用领域有较多应用的是无人艇(全称是无人水面艇Unmanned Surface Vessel,简称USV)注要用来执行排雷仮潜作战和反特种作战等危险任务。
民用方面,当下无人船主要应用于水下地形图的绘制、水产养殖的自动化喂养以及环境和水质的测量等。
USV可以通过搭载不同的任务载荷从而能够完成不同的任务,而体积较小、成本较低和机动性强等侍点使得无人船艇在众多领域中具有巨大的潜力。
1国内外无人船现状无人船技术的应用最早是起源于二战时期,在冷战期间无人船得到快速发展,而时至今日,无人船也逐渐从军事走向了民用。
军事领域用的无人船我们更多称之为无人水面艇(Unmanned Surface Vessel,简称USV)O开展USV研制的国家和地区主要有美国、以色列、法国、英国、德国、日本、俄罗斯、新加坡等。
现有的USV绝大多数由美国及盟国研制,其中美国和以色列在USV军事方面领先全世界。
国外对无人艇的研制时间相对较早,且当下技术比较成熟。
美国对USV的正式研制是从上世纪90年代开始的,研制时间早加上投入力度大使得美国成为当下USV先进技术的掌握者,其早期研制的"遥控猎雷作战原型艇"(Remote Mine-hunting Operational Prototype,简称RMOP)便在1997年1月成功进行了海上猎雷行动演习。
![深潜器[资料]](https://uimg.taocdn.com/ffe2cf3ae3bd960590c69ec3d5bbfd0a7956d577.webp)
深潜器定义由一个充满轻液体的船型浮筒与可容纳 2 - 3 人的耐压球组成的深海潜水器。
简介深潜器是具有水下观察和作业能力的活动深潜水装置,又称可潜器。
主要用来执行水下考察、海底勘探、海底开发和打捞、救生等任务,并可以作为潜水员活动的水下作业基地。
研究背景浩瀚的海洋占住了地球表面积的71%,深底丰富的石油蕴藏、堆积着无数的锰团以及其他资源吸引着一些工业发达国家竞相进行海洋开发事业。
深潜技术是进行海洋开发的必要手段,它是由深潜器、工作母船(水面支援船)和陆上基地所组成的一个完整的系统,深潜器是其关键部份。
此外,为了对深海失事潜艇实施营救,对深海沉船进行打捞以及深海考察,深潜侦察等都需要具备深潜器。
深潜器的建造难度较大,其电气化、自动化的程度较高。
每年都有数千名水手搭乘各型军用潜艇在海面下穿行;数千名商业潜水员在建设或维修海底输油管道、通信电缆和石油钻塔;数千名潜水爱好者以探寻海底奥秘为乐;数百名科研人员潜入深海进行科学研究。
另外,还有许多海底机器人在人类无法承受的深度进行探险活动。
美国政府每一年在太空研究方面的投入高达数十亿美元,而在深海研究方面则要少的多。
其实深海探险和太空探险之间既存在着许多的相同点,同时也有一些明显的不同。
人类探寻深海至少比探寻太空早一倍的时间,而且发展思路也大不相同。
但是这些差别正逐渐变小,深海研究者和太空研究者彼此越来越相像。
更加重要的,深海探险现在能够对太空探险产生巨大影响。
历史沿革1928年,一位美国人,奥蒂斯巴顿发明并建造了第一艘球形深海探测装置。
该装置通身都用钢铁建造,它可以从一艘水面船舶上通过连接的电缆下潜到海面之下。
1930年,巴顿和另一名博物学家威廉.彼博一起乘坐这个球形装置下潜到了距海面245米(803英尺)的深度;1932年,他们又下潜到了923米(3028英尺)的深度——这一纪录直到15年之后才被打破。
后来彼博写了一本书《1/2英里之下》,他在书中详细描绘了所见到的奇异的海底生物。
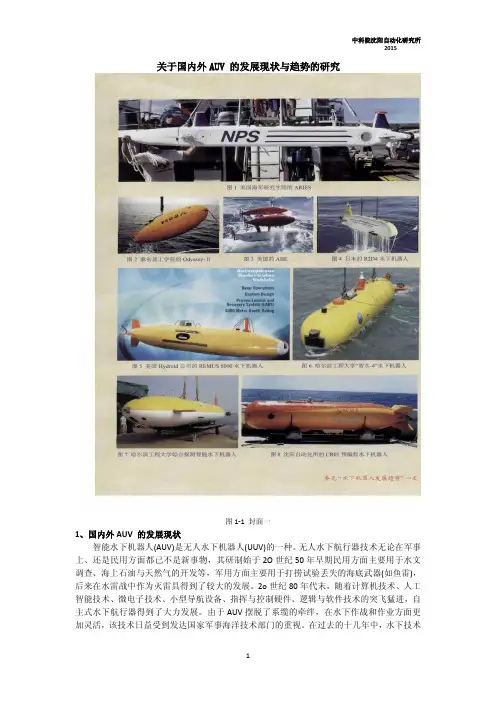
关于国内外AUV的发展现状与趋势的研究图1-1封面一1、国内外AUV的发展现状智能水下机器人(AUV)是无人水下机器人(UUV)的一种。
无人水下航行器技术无论在军事上、还是民用方面都已不是新事物,其研制始于2O世纪50年早期民用方面主要用于水文调查、海上石油与天然气的开发等,军用方面主要用于打捞试验丢失的海底武器(如鱼雷),后来在水雷战中作为灭雷具得到了较大的发展。
2o世纪80年代末,随着计算机技术、人工智能技术、微电子技术、小型导航设备、指挥与控制硬件、逻辑与软件技术的突飞猛进,自主式水下航行器得到了大力发展。
由于AUV摆脱了系缆的牵绊,在水下作战和作业方面更加灵活,该技术日益受到发达国家军事海洋技术部门的重视。
在过去的十几年中,水下技术较发达的国家像美国、日本、俄罗斯、英国、法国、德国、拿大、典、意大利、挪威、冰岛、葡萄牙、丹麦、韩国、澳大利亚等建造了数百个智能水下机器人,虽然大部分为试验用,但随着技术的进步和需求的不断增强,用于海洋开发和军事作战的智能水下机器人不断问世。
由于智能水下机器人具有在军事领域大大提升作战效率的优越性,各国都十分重视军事用途智能水下机器人的研发,著名的研究机构有:美国麻省理工学院MIT Sea Grant S AUV实验室、美国海军研究生院(Naval Postgraduate Schoo1)智能水下运载器研究中心、美国伍慈侯海洋学院(WoodsHole0ceanographic Institute)、美国佛罗里达大西洋大学高级海洋系统实验室(Advanced Marine Systems La.boratory)、美国缅因州大学海洋系统工程实验室(Ma.rine Systems Underwater Systems Institute)、美国夏威夷大学自动化系统实验室(Autonomous Systems Labo.ratory)、日本东京大学机器人应用实验室(UnderwaterRobotics Application Laboratory(URA))、英国海事技术中心(Marine Technology Center)等。
UUV关键技术及发展趋势探讨舒国平朱新星发布时间:2023-07-18T04:42:35.396Z 来源:《中国科技信息》2023年9期作者:舒国平朱新星[导读] 依据控制方式的不同,UUV可分为无人自主潜航器(AUV)、有缆遥控潜器(ROV)和自主遥控复合型潜器(HROV)等。
其中,AUV能够依靠其自治能力完成任务,具有机动灵活、使用成本低、作业范围大、环境适应能力强等特点;ARV配备与母船连接的缆索,能够以自主、遥控、半自动等多种模式作业。
本文分析了其主要关键技术,并展望了其发展趋势。
中国船舶集团公司第七一○研究所湖北宜昌 443003摘要:依据控制方式的不同,UUV可分为无人自主潜航器(AUV)、有缆遥控潜器(ROV)和自主遥控复合型潜器(HROV)等。
其中,AUV能够依靠其自治能力完成任务,具有机动灵活、使用成本低、作业范围大、环境适应能力强等特点;ARV配备与母船连接的缆索,能够以自主、遥控、半自动等多种模式作业。
本文分析了其主要关键技术,并展望了其发展趋势。
关键词:UUV;关键技术;发展趋势1 研究现状无人潜航器(UUV)研制始于20世纪50年代。
进入21世纪,随着结构材料、智能控制、导航定位、能源推进及传感器等技术的不断发展,无人潜航器的工作深度、自主控制、续航时间及作业能力均大幅提升。
以美欧为代表的海洋科技强国大力发展大深度无人潜航器装备,多型大深度AUV、ARV已实现业务化应用。
美国在大深度无人潜航器领域居世界领先地位,主要研发应用机构包括美国海军水下作战中心、海军研究局、国防部高级研究计划局(DARPA)等军方单位以及伍兹霍尔海洋研究所(WHOI)、华盛顿大学、麻省理工学院、Hydroid公司、Teledyne公司、波音公司和洛克希德·马丁公司等科研院所和企业。
REMUS系列AUV是美国性能最先进、列装最多、应用最广泛的无人潜航器系列,采用模块化设计,能够搭载不同类型任务载荷完成多种使命任务,已大量出口英、日、澳等国。
332021 11 世界科学MASTERS 大家•科技前沿海洋智能无人艇谢少荣海洋强国建设的重要支撑力量:无人艇我国有1.8万公里海岸线,1.4万千公里岛礁岸线,大量的海洋资源等待开发。
海洋安全是国家安全保障的核心之一,随着海洋强国战略的实施,海洋成为大国博弈的“主战场”。
尤其是近年来,随着“一带一路”建设的逐步推进,以及新冠疫情暴发后世界局势的变化,西方国家接连在我国附近海域展开军事演习等活动,威胁我国海洋安全。
同时,随着科技的发展,智能化的无人设备和技术得到了广泛应用。
跨越“空-天-地-海”的无人系统是未来发展的趋势。
民用上是用更多的机器人系统替代人的工作,特别是从可能有危险、不适合人做的、枯燥乏味的工作中把人解放出来。
而从军事应用上来讲,就是发展无人作战系统,这将从根本上改变未来的战争形态。
无人作战系统是西方国家未来战略的重要内容,直指我国南海,将通过无人水面和水下装备、无人机等武器突破我国的防御,威胁我国国家安全。
未来战场可能会成为无人系统而不是人类之间的角逐。
因此,在海洋强国建设的过程中,亟需无人舰艇这样的高精尖新型海洋智能装备,它们是我们迈向海洋强国的关键支撑力量。
什么是无人艇无人艇,这里特指“无人水面艇”(unmanned surfacevehicle ,USV ),是指依靠遥控或自主方式在水面航行的无人化、智能化机器人平台。
因此,它也叫海洋机器人、海上无人系统。
具有自主导航、自主避障能力,并可以自主完成海面、水下环境信息感知、目标探测及各种作业任务。
众所周知,飞机与飞机,飞机和地面、水面可以通过无线电通信。
但是,由于海水中存在一定的导电介质,传统的无线电波很难穿透海水,在海面以下进行通信。
现代各国普遍采用长波/超长波水下通信系统,它在海水中衰减较其他频段电波小,入水传播深度可达到100米,基本满足深水中进行通信的需求。
但是它发射时需要庞大的发射天线或者超高的发射功率,使得发射设备极易受到敌方的打击;加上传输频带窄,只能与岸基进行单向通信,不能进行双向通信;另外隐蔽性差,水下传输速率低,潜艇主要还是依靠上浮接收信息,降低了潜艇的隐蔽性,增大了潜艇的危险系数。