两相混合式步进电机及其驱动技术(公开)
- 格式:ppt
- 大小:5.12 MB
- 文档页数:55
Q2HB44MC二相混合式步进电机驱动器使用说明1.硬件连接:-将驱动器的V+和GND引脚分别连接到电源的正负极上。
-将电机的两组相线分别连接到驱动器的A+、A-和B+、B-引脚上。
-根据实际情况,选择并连接好步进电机的继电器控制引脚。
2.驱动器参数设置:-驱动器上有一个参数选择开关,用于设置驱动器的工作模式和细分数。
通过设置不同的参数,可以调整电机的转速和精度。
-请参考电机和驱动器的技术手册,了解具体参数设置的含义和影响。
-注意,参数设置需要在电机和驱动器均断电的情况下进行,避免人身伤害和设备损坏。
3.输入信号控制:-本驱动器支持两种输入信号控制方式:脉冲/方向控制和CW/CCW控制。
-脉冲/方向控制方式:通过脉冲信号控制电机的转动步数,在每个脉冲输入时电机转动一个步进角。
方向信号用于控制电机的转动方向。
-CW/CCW控制方式:通过CW、CCW信号控制电机的正转和反转。
-根据实际应用需求选择合适的控制方式,并通过设置驱动器的参数进行配置。
4.报警和保护功能:-本驱动器具备多种报警和保护功能,如过流保护、过热保护等。
-当驱动器工作时发生异常情况,比如过载或温度过高,驱动器会自动停止工作并触发保护功能。
-在使用过程中,要留意驱动器的报警灯和状态指示灯,以便及时发现和解决问题。
5.电机转动方向控制:-本驱动器可通过反转相线的连接方式来控制电机的正转和反转。
-如果电机正反转方向与期望不符合,只需要将A相或B相的两根线交换位置即可实现方向的改变。
6.搭配控制器使用:-本驱动器可以与各种控制器配合使用,如PLC、单片机等。
-控制器需要提供相应的控制信号给驱动器,通过控制信号实现电机的控制和运动。
7.其他注意事项:-在电源和驱动器连接时,确保电源稳定,避免电压波动和供电问题对驱动器正常工作造成影响。
-避免驱动器的过度负载运行,以免损坏电机和驱动器。
-定期检查和清洁驱动器,确保散热良好,以防止过热损坏。
-遵循驱动器和电机的使用和维护手册,避免误操作。
二相混合式
二相混合式步进电机是一种特殊的步进电机,其绕组连接方式为两相混合式。
这种步进电机通常由两相定子绕组组成,其中一相为A相,另一相为B相。
在步进电机的运行过程中,A相和B相轮流通电,以产生旋转磁场,驱动转子旋转。
在二相混合式步进电机中,绕组以固定的模式进行环绕,让一相中的2个磁极,工作状态下拥有一样的吸引力或者排斥力。
例如,对于线圈1和线圈5,当开关k2和k4闭合时,各个线圈中电流反向,产生的感应磁场反向,即磁极3与磁极7呈N极、磁极1与磁极5呈S极。
此时,二相混合式步进电机步中,步进电机的S极转子,与定子的S 极磁极反映的磁力是呈现斥力的状态,而它与定子的N极却是呈现吸力的状态;这些力的合力,推动了转子的转动。
因此,只要单次供电,转子便会完成一个旋转动作,同时转过1/4个齿距角。
总的来说,二相混合式步进电机具有较高的控制精度和运行稳定性,且体积小、重量轻、噪音低、耗能低等优点,因此在许多领域得到了广泛的应用。
两相混合式步进电机细分控制两相混合式步进电机细分控制是一种常用的步进电机控制技术,可以实现高精度和高速度的运动控制。
本文将介绍两相混合式步进电机的工作原理、细分控制技术以及在实际应用中的一些注意事项。
首先,我们来了解一下两相混合式步进电机的工作原理。
两相混合式步进电机由两个相位的线圈组成,每个相位有两个线圈。
当电流通过线圈时,会产生磁场,这个磁场会与电机中的永磁体相互作用,从而产生力矩,推动电机转动。
通过交替激励两个相位的线圈,可以控制电机的转动方向和步长。
在细分控制中,我们需要将一个完整的步进角度细分为更小的角度,以提高步进电机的精度和平滑性。
常见的细分控制技术有全步进、半步进和微步进。
全步进是最基本的细分控制技术,将一个完整的步进角度等分为若干个小角度。
例如,将一个360度的步进角度等分为200个小角度,每个小角度为1.8度。
全步进可以实现较高的转动精度,但在低速运动时容易产生共振和震动。
半步进是在全步进的基础上进行细分的一种技术。
它将一个完整的步进角度等分为更小的角度,并在每个小角度中交替激励两个相位的线圈。
例如,将一个360度的步进角度等分为400个小角度,每个小角度为0.9度。
半步进可以提高步进电机的转动平滑性和精度,但在高速运动时容易失步。
微步进是最高级别的细分控制技术,可以将一个完整的步进角度细分为更小的角度,并通过改变线圈电流的大小和方向来控制电机的转动。
微步进可以实现非常高的转动精度和平滑性,但同时也增加了系统复杂性和成本。
在实际应用中,我们需要根据具体需求选择合适的细分控制技术。
如果对转动精度要求较高,可以选择全步进或半步进;如果对转动平滑性要求较高,可以选择半步进或微步进。
同时,还需要注意以下几点:1. 选择合适的驱动器和控制器:不同的细分控制技术需要相应的驱动器和控制器来实现。
因此,在选择步进电机系统时,需要考虑其兼容性和可靠性。
2. 控制参数调整:在使用细分控制技术时,需要根据具体情况调整控制参数,如脉冲频率、加速度和减速度等。
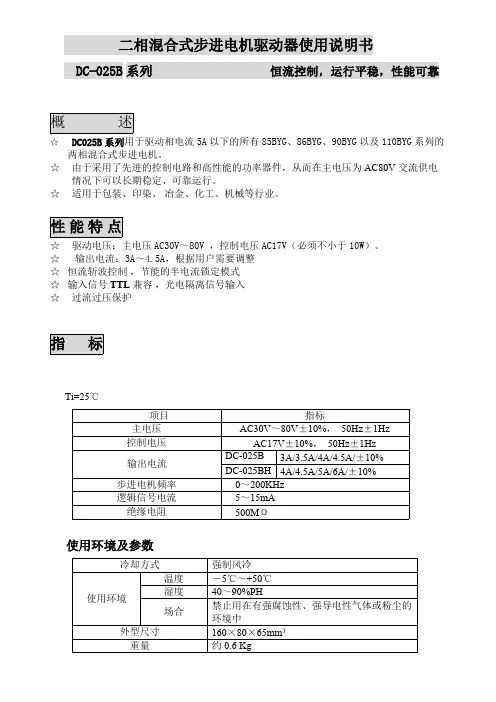
二相混合式步进电机驱动器使用说明书DC-025B 系列 恒流控制,运行平稳,性能可靠☆ DC025B 系列用于驱动相电流5A 以下的所有85BYG 、86BYG 、90BYG 以及110BYG 系列的两相混合式步进电机。
☆由于采用了先进的控制电路和高性能的功率器件,从而在主电压为AC80V 交流供电情况下可以长期稳定、可靠运行。
☆适用于包装、印染、 冶金、化工、机械等行业。
☆驱动电压:主电压AC30V ~80V ,控制电压AC17V (必须不小于10W )。
☆ 输出电流:3A ~4.5A ,根据用户需要调整 ☆ 恒流斩波控制 ,节能的半电流锁定模式 ☆ 输入信号TTL 兼容 ,光电隔离信号输入 ☆过流过压保护Ti=25℃项目指标主电压AC30V ~80V ±10%, 50Hz ±1Hz 控制电压AC17V ±10%, 50Hz ±1Hz DC-025B 3A/3.5A/4A/4.5A/±10%输出电流DC-025BH 4A/4.5A/5A/6A/±10%步进电机频率 0~200KHz 逻辑信号电流 5~15mA 绝缘电阻500M Ω使用环境及参数冷却方式强制风冷温度-5℃~+50℃湿度40~90%PH使用环境场合禁止用在有强腐蚀性、强导电性气体或粉尘的环境中外型尺寸160×80×65mm 3重量约 0.6 KgP 1危念,牢固展稳定实践中五个必须”等重要律和政治规矩,带头牢责任。
三、主要措施 支部为单位开展一次主、谈,对照入党誓词找标准温入愿和入党誓词,交流思想组中心组形期组织集中学习,每次组每月底组织一员集中学习。
支部每季度政治方向”、“坚持宗旨,敢于担当作为”、个专题集中学习讨论不于1天。
(三)开展“讲党课”要求,开展班子成员到联系区县X X 局部党员讲党课,邀请党师、专家学者给党员干规、学系列 讲话,做党员”学习教育实施方列讲话,做合格党员习教育(以下简称“两开展“学党章党规、列讲话,做合格党于印发〈关于在全市中开展“学党办〔2016〕28号),局实际,一做”学习教育,基话,全面贯彻落实党大和“三严三实”专题结合、创先争优,进改,进一步坚持问头、以上率下,局和“决胜明可由用户自己随意选择。
二相混合式步进电机驱动电路嘿,今天咱们聊聊二相混合式步进电机驱动电路,乍一听有点高大上是吧?别怕,咱慢慢捋,保证让你听得懂、看得明白,甚至能感叹一下“哦,原来是这么回事!” 咱得弄明白,步进电机是什么玩意儿。
其实吧,它就是一种特别有意思的电机,每转一小步就停下,再转一小步再停下。
你说说,这么“精确”的控制,用它来做什么?嘿,简单啊,很多精密的设备上,像打印机、数控机床、3D打印机啥的,都在用步进电机。
就是为了让它们每一步都不偏离目标,转得稳稳当当。
那么问题来了,既然步进电机这么牛逼,它是怎么转的呢?嘿,这就是今天要说的重点——二相混合式步进电机驱动电路。
听起来是不是很复杂,感觉脑袋都大了?不过你放心,咱一步步拆开,慢慢跟你说。
这二相混合式步进电机,是啥意思?通俗点讲吧,二相就是指电机的两个线圈,咱可以通过给它们加电流来让电机一步一步地转动。
想象一下,像是两个人拉着绳子往不同方向牵引,电流就相当于这个“拉绳”的力量,它控制着电机每次精确地转动。
不过光有电流可不行啊,咱还得有个聪明的“指挥官”,才能确保电机按计划走。
不然的话,这电机的步伐就可能一会儿快一会儿慢,甚至有可能绕着圈子走。
就是因为这个原因,咱们才有了“驱动电路”这种玩意儿。
驱动电路的作用呢,就是给电机提供所需的电流,确保每一步都按时按点、稳稳当当地走。
简单来说,它就是电机的大脑,指挥着电流的走向,让电机按照预定的方式、方向转动。
你想啊,如果没有一个精确的控制,电机怎么可能在各种高要求的场合中发挥作用?要知道,步进电机可不是什么普通的玩意儿,它的每一步都得特别精准,偏差一点都不行。
比如,你要让步进电机转动某个角度,如果它转得不精确,那就可能导致整个设备的精度出问题,结果可就麻烦了。
所以,步进电机的驱动电路,必须得有足够的“智慧”,才能确保电机按照要求一步一步地走。
再来说说,为什么要用二相混合式的驱动电路呢?你看,二相步进电机一般就有两个绕组,分别负责两个方向的电流流动。
![两相混合式步进电机的重载闭环驱动系统及方法[发明专利]](https://uimg.taocdn.com/2435a62153d380eb6294dd88d0d233d4b14e3fc2.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810230182.X(22)申请日 2018.03.20(71)申请人 浙江理工大学地址 310018 浙江省杭州市下沙高教园区2号大街5号(72)发明人 鲁文其 吴迪 黄培杰 王秀锋 纪科辉 张祯毅 (74)专利代理机构 杭州中成专利事务所有限公司 33212代理人 金祺(51)Int.Cl.H02P 8/38(2006.01)H02P 21/18(2016.01)(54)发明名称两相混合式步进电机的重载闭环驱动系统及方法(57)摘要本发明提供一种两相混合式步进电机的重载闭环驱动系统,包括位置混合控制器、第一减法器、第二减法器、变系数PI调节器、两相SVPWM调制模块、三相逆变器、Clark变换模块、超前角度补偿模块、编码器和两相混合式步进电机;本发明还提供一种两相混合式步进电机的重载闭环驱动方法,包括位置混合控制器、变系数PI调节器和超前角度补偿模块的实现方法,本发明的重载闭环驱动系统,相比开环步进电机驱动系统,不会发生丢步现象,能够保证电机精确定位;设备工作速度更高;电机的发热更低,使用寿命更长;且在高速运动过程中还能保持高转矩运行。
权利要求书3页 说明书7页 附图2页CN 108448965 A 2018.08.24C N 108448965A1.两相混合式步进电机的重载闭环驱动系统,其特征是:包括位置混合控制器(1)、第一减法器(2)、第二减法器(3)、变系数PI调节器(4)、两相SVPWM调制模块(5)、三相逆变器(6)、Clark变换模块(7)、超前角度补偿模块(8)、编码器(9)和两相混合式步进电机(10);所述两相混合式步进电机(10)输出两相实际电流i a、i b到Clark变换模块(7),两相混合式步进电机(10)通过编码器(9)输出电机实际反馈位置θfed到超前角度补偿模块(8)和位置混合控制器(1);所述Clark变换模块(7)根据输入的两相实际电流i a、i b,经运算得出实际静止两相坐标系下的电流分量iαfed、iβfed,并将实际静止两相坐标系下的α轴电流分量iαfed输出到第一减法器(2),将实际静止两相坐标系下的β轴电流分量iβfed输出到第二减法器(3);所述超前角度补偿模块(8)根据输入的实际反馈位置θfed、位置混合控制器(1)输入的给定位置角度θref和给定速度n ref,经运算得出实际速度n fed和超前角度θc,并将实际速度n fed输出到变系数调节器(4),将超前角度θc输出到位置混合控制器(1)和两相SVPWM调制模块(5);上位机系统将脉冲信号Pluse输入到位置混合控制器(1);所述位置混合控制器(1)根据输入的脉冲信号Pluse、电机实际反馈位置θfed和超前角度θc,经运算得出给定位置角度θref、给定速度n ref和给定静止两相坐标系下的电流分量iαref、iβref,并将给定位置角度θref和给定速度n ref输出到超前角度补偿模块(8),将给定静止两相坐标系下的电流分量iαref、iβref分别输出到第一减法器(2)和第二减法器(3);第一减法器(2)根据输入的给定静止两相坐标系下的α轴电流分量iαref和实际静止两相坐标系下的α轴电流分量iαfed,经运算得出α轴的电流误差分量Δiα,并将α轴的电流误差分量Δiα输出到变系数PI调节器(4);第二减法器(3)根据输入的给定静止两相坐标系下的β轴电流分量iβref和实际静止两相坐标系下的β轴电流分量iβfed,经运算得出β轴的电流误差分量Δiβ,并将β轴的电流误差分量Δiβ输出到变系数PI调节器(4);变系数PI调节器(4)根据输入的α、β轴的电流误差分量Δiα、Δiβ和实际速度n fed,经运算得出静止两相坐标系下的电压分量uα、uβ,并将静止两相坐标系下的电压分量uα、uβ输入到两相SVPWM制模块(5);两相SVPWM调制模块(5)根据输入的静止两相坐标系下的电压分量uα、uβ,经运算输出6路PWM信号,并将6路PWM信号输入到三相逆变器(6);通过三相逆变器(6)驱动两相混合式步进电机(10)运行。
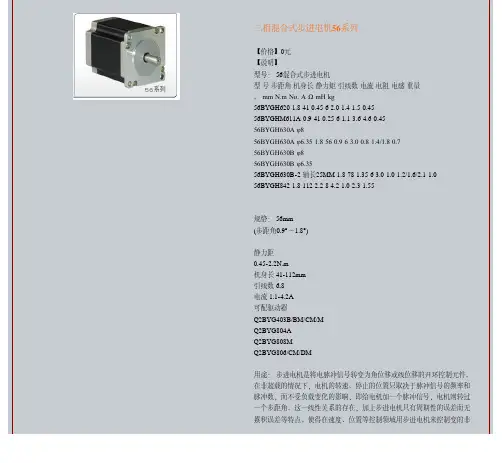
二相混合式步进电机56系列【价格】0元【说明】型号: 56混合式步进电机型号步距角机身长静力矩引线数电流电阻电感重量。
mm N.m No. A Ω mH kg56BYGH620 1.8 41 0.45 6 2.0 1.4 1.5 0.4556BYGHM611A 0.9 41 0.25 6 1.1 3.6 4.6 0.4556BYGH630A φ856BYGH630A φ6.35 1.8 56 0.9 6 3.0 0.8 1.4/1.8 0.756BYGH630B φ856BYGH630B φ6.3556BYGH630B-2 轴长25MM 1.8 78 1.35 6 3.0 1.0 1.2/1.6/2.1 1.056BYGH842 1.8 112 2.2 8 4.2 1.0 2.3 1.55规格: 56mm(步距角0.9°~1.8°)静力距0.45-2.2N.m机身长 41-112mm引线数 6,8电流 1.1-4.2A可配驱动器Q2BYG403B/BM/CM/MQ2BYG804AQ2BYG808MQ2BYG806/CM/DM用途:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。

二相混合式步进电机工作原理
二相混合式步进电机是一种常见的电机类型,其工作原理基于电磁学和电机技术的原理。
它通过交替激活不同相的线圈,从而实现精确的步进运动。
下面将详细介绍二相混合式步进电机的工作原理。
结构组成
二相混合式步进电机通常由两个相位组成,每个相位上分布了若干个定子线圈和一个旋转子。
当线圈中通入电流时,会产生磁场,从而与旋转子上的磁极相互作用,驱动电机转动。
工作原理
二相混合式步进电机的工作原理主要分为双极性和单极性两种情况。
双极性工作原理
在双极性工作原理下,当其中一个相位的线圈通电时,会产生一个磁场,旋转子会受到磁场的作用而转动一定角度。
当该相位线圈断电后,另一个相位的线圈通电,再次产生磁场,旋转子继续转动。
通过不断交替激活两个相位,电机就可以实现步进运动。
单极性工作原理
在单极性工作原理下,每个相位的线圈上有两个继电器,一个用于通电,一个用于断电。
在通电继电器工作时,电机按照上述双极性原理动作;而在断电继电器工作时,旋转子会定在原位。
通过这种方式,可以实现更高精度的步进运动。
特点及应用
二相混合式步进电机具有精度高、噪音低、响应速度快等特点,广泛应用于打印机、数码相机、自动化设备等领域。
其步进运动的精确性使得它成为许多精密设备中不可或缺的元件。
总的来说,二相混合式步进电机通过交替激活不同相的线圈来实现步进运动,具有精度高、噪音低等特点,被广泛应用于各种自动化设备中,是现代工业中一种重要的驱动装置。