基于激光多边法的坐标测量系统最佳布局_胡进忠
- 格式:pdf
- 大小:347.30 KB
- 文档页数:7
采用标准长度的激光多边法坐标测量系统自标定算法郑继辉;缪东晶;李建双;徐志玲;赫明钊;李连福【摘要】基于多路激光跟踪干涉仪测长的坐标测量系统在大尺寸测量领域具有显著的优越性,准确标定系统参数是实现高精度坐标测量的关键.为了克服传统自标定方法的缺点,提出了一种采用标准长度的改进自标定算法.该算法首先在稳定的基座上设置固定点,在X、Y、Z方向分别产生用激光干涉法精确测得的标准长度,然后将标准长度用于构造自标定的优化函数.通过提高相应优化函数的权重,进一步提高坐标测量精度.通过仿真实验证明了该算法的可行性.采用独立的激光干涉仪验证系统在大尺寸范围内的测量精度,当测量点分布在距系统坐标系原点[7.0m,8.3m]区间内,两组实验误差均分布在[-9.5 μm,4.6 μm]区间内,结果表明所提出自标定算法可显著提高大尺寸空间坐标测量精度.【期刊名称】《计量学报》【年(卷),期】2019(040)001【总页数】7页(P64-70)【关键词】计量学;大尺寸测量;激光多边法;自标定算法;标准长度;激光跟踪干涉仪【作者】郑继辉;缪东晶;李建双;徐志玲;赫明钊;李连福【作者单位】中国计量大学计量测试工程学院,浙江杭州310018;中国计量科学研究院,北京100029;中国计量科学研究院,北京100029;中国计量大学计量测试工程学院,浙江杭州310018;中国计量科学研究院,北京100029;中国计量科学研究院,北京100029【正文语种】中文【中图分类】TB921 引言大空间坐标测量系统广泛应用于航空航天、汽车舰船、工业机器人等领域中的位置测量场合,其测量精度要求也越来越高[1,2]。
现有的大空间坐标测量系统测量原理主要包括:采用激光测距与计算机视觉混合测量;基于计算机视觉测量和角度长度信息交汇测量。
目前高精度的激光跟踪仪和摄影测量一般需要结合角度或像素等信息,精度会受到影响,而室内GPS空间坐标的测量精度为mm级[3]。
激光跟踪坐标测量系统的双线法基点自标定
周春艳
【期刊名称】《科学技术与工程》
【年(卷),期】2009(009)012
【摘要】激光跟踪三维坐标测量是一种新型的大范围坐标测量方法.在实际测量中,系统首先要经过标定,确定系统参数,然后才可以进行测量.因此,系统参数自标定的精度直接影响测量的精度.为了分析误差起因,提高标定精度.提出了一种新型的标定方法,用激光干涉仪双直线法来标定测量系统的基点坐标,通过仿真和实验,证明该标定方法可提高激光跟踪系统基点坐标的标定精度.
【总页数】3页(P3429-3431)
【作者】周春艳
【作者单位】北方民族大学电气与信息工程学院,银川,750021
【正文语种】中文
【中图分类】P215
【相关文献】
1.一种新的四路激光跟踪坐标测量系统的基点标定方法 [J], 陈曦;李杏华;张国雄;赵树忠
2.球坐标法激光跟踪测量系统自校正方法研究 [J], 陈晓荣;陈淑芬
3.采用标准长度的激光多边法坐标测量系统自标定算法 [J], 郑继辉;缪东晶;李建双;徐志玲;赫明钊;李连福
4.基于激光多边法的坐标测量系统自标定研究 [J], 胡进忠;余晓芬;刘媛媛
5.四路激光跟踪干涉三维坐标测量系统自标定与仿真 [J], 林永兵;张国雄;李真;李杏华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于激光跟踪仪的新型顺次多边法
张振久;刘明俊;赵振宇;王均伟
【期刊名称】《深圳信息职业技术学院学报》
【年(卷),期】2017(015)001
【摘要】针对空间3D坐标检测问题,提出一种基于激光跟踪仪的新型顺次多边法.此方法的测量系统包括一台激光跟踪仪和四个附加靶座,其中四个附加靶座的相对位置已经通过顺次多边法进行了校正.把一台激光跟踪仪依次安装在三个不同的位置,并利用激光跟踪仪检测附加靶座及被测点与各个激光跟踪仪站位之间的距离.执行四次多边法,就能够得到被测点的空间坐标.利用实验验证了顺次多边法的有效性,x、y和z的最大测量误差分别为2.65μm、2.43μm和2.68μm.
【总页数】5页(P15-19)
【作者】张振久;刘明俊;赵振宇;王均伟
【作者单位】深圳信息职业技术学院机电工程学院,广东深圳 518172;深圳信息职业技术学院机电工程学院,广东深圳 518172;深圳信息职业技术学院机电工程学院,广东深圳 518172;深圳市雷赛控制技术有限公司,广东深圳 518055
【正文语种】中文
【中图分类】TN247
【相关文献】
1.多边法激光三维坐标测量系统及其跟踪机构设计 [J], 赵树忠;张国雄
2.新型飞秒激光跟踪仪中飞秒激光测距研究 [J], 胡坤;黎尧;纪荣祎;周维虎;刘德明
3.基于MLPG法的新型无网格法——多边形无网格法 [J], 郭峰;赵伟民;李瑰贤
4.激光跟踪仪多边测量的不确定度评定 [J], 任瑜;刘芳芳;张丰;傅云霞;邾继贵
5.基于C#编程实现高斯牛顿法求解激光跟踪干涉仪基站空间坐标 [J], 唐文秀; 林虎; 薛梓; 秦海濛; 铁咪咪
因版权原因,仅展示原文概要,查看原文内容请购买。
大视场多视觉传感器测量系统的全局标定方法
赵玉华;袁峰;丁振良;李晶
【期刊名称】《应用基础与工程科学学报》
【年(卷),期】2011(19)4
【摘要】研究了姿态测量系统中多视觉传感器在大视场条件下的标定技术.提出了一种基于激光跟踪仪的多视觉测量系统的全局标定法.利用激光跟踪仪在现场构建系统总体坐标系.通过对测量系统中的屏幕扫描拟合基准面作为标定板,然后在其表面设置标定点,并精确测定共面标定点位置.针对一阶径向畸变的摄像机模型,分步标定各参数,且全部采用线性方法求解,避免了非线性优化中的不稳定性.通过坐标反求的方法应用贝塞尔公式计算标准差.实验结果表明,在8000mm×6000mm范围内可以得到0.47mm的测量精度.可以满足多视觉测量系统的总体测量精度要求.【总页数】10页(P679-688)
【关键词】多视觉传感器;姿态测量;全局标定;标定精度
【作者】赵玉华;袁峰;丁振良;李晶
【作者单位】哈尔滨工业大学自动化测试与控制系;哈尔滨理工大学应用科学学院【正文语种】中文
【中图分类】TP412.41
【相关文献】
1.大视场多像机视频测量系统的全局标定 [J], 胡浩;梁晋;唐正宗;史宝全;郭翔
2.大视场双目视觉传感器的现场标定 [J], 孙军华;吴子彦;刘谦哲;张广军
3.钢轨轮廓测量中多视觉传感器全局标定方法研究 [J], 占栋;于龙;肖建;陈唐龙;张冬凯
4.隧道净空全断面测量中多视觉传感器全局标定方法 [J], 占栋;于龙;肖建;陈唐龙
5.大视场线结构光视觉传感器的现场标定 [J], 刘冲;孙军华;刘震;张广军
因版权原因,仅展示原文概要,查看原文内容请购买。
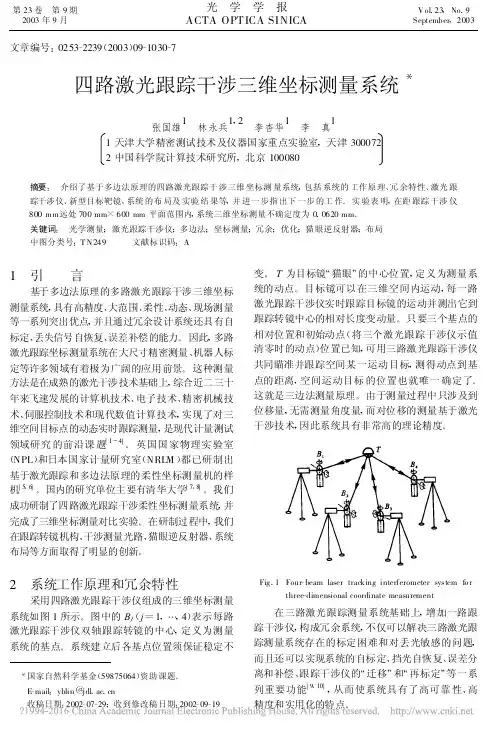
文章编号:0253-2239(2003)09-1030-7四路激光跟踪干涉三维坐标测量系统*张国雄1 林永兵1,2 李杏华1 李 真11天津大学精密测试技术及仪器国家重点实验室,天津3000722中国科学院计算技术研究所,北京100080摘要: 介绍了基于多边法原理的四路激光跟踪干涉三维坐标测量系统,包括系统的工作原理、冗余特性、激光跟踪干涉仪、新型目标靶镜、系统的布局及实验结果等,并进一步指出下一步的工作。
实验表明,在距跟踪干涉仪800mm 远处700mm ×600mm 平面范围内,系统三维坐标测量不确定度为0.0620mm 。
关键词: 光学测量;激光跟踪干涉仪;多边法;坐标测量;冗余;优化;猫眼逆反射器;布局中图分类号:T N 249 文献标识码:A *国家自然科学基金(59875064)资助课题。
E -mail :yblin @jdl .ac .cn收稿日期:2002-07-29;收到修改稿日期:2002-09-191 引 言基于多边法原理的多路激光跟踪干涉三维坐标测量系统,具有高精度、大范围、柔性、动态、现场测量等一系列突出优点,并且通过冗余设计系统还具有自标定、丢失信号自恢复、误差补偿的能力。
因此,多路激光跟踪坐标测量系统在大尺寸精密测量、机器人标定等许多领域有着极为广阔的应用前景。
这种测量方法是在成熟的激光干涉技术基础上,综合近二三十年来飞速发展的计算机技术、电子技术、精密机械技术、伺服控制技术和现代数值计算技术,实现了对三维空间目标点的动态实时跟踪测量,是现代计量测试领域研究的前沿课题[1~4]。
英国国家物理实验室(NPL )和日本国家计量研究室(NRLM )都已研制出基于激光跟踪和多边法原理的柔性坐标测量机的样机[5,6]。
国内的研究单位主要有清华大学[7,8]。
我们成功研制了四路激光跟踪干涉柔性坐标测量系统,并完成了三维坐标测量对比实验。
在研制过程中,我们在跟踪转镜机构、干涉测量光路、猫眼逆反射器、系统布局等方面取得了明显的创新。

![一种基于激光跟踪仪的多轴孔自动化对准方法[发明专利]](https://uimg.taocdn.com/aa350422f08583d049649b6648d7c1c708a10b67.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810939232.1(22)申请日 2018.08.17(71)申请人 清华大学地址 100084 北京市海淀区清华园1号(72)发明人 徐静 陈恳 刘炽成 吴丹 宋立滨 (74)专利代理机构 北京清亦华知识产权代理事务所(普通合伙) 11201代理人 廖元秋(51)Int.Cl.B23P 19/12(2006.01)(54)发明名称一种基于激光跟踪仪的多轴孔自动化对准方法(57)摘要本发明提出一种基于激光跟踪仪的多轴孔自动化对准方法,属于大型零部件装配控制技术领域。
该方法首先搭建由激光跟踪仪,机械臂和计算机组成的多轴孔自动化对准系统,将带轴部件安装在机械臂端面;分别建立带轴部件坐标系和带孔部件坐标系,得到两个坐标系间的旋转矩阵和平移向量;在带轴部件上安装4个不共线的反射靶球,计算每个靶球对应的目标位置;获取机械臂的初始的雅可比矩阵;从初始位置开始,通过迭代控制机械臂的运动,使得带轴部件逐渐靠近带孔部件,当4个反射靶球到达目标位置时,完成带轴部件和带孔部件的对准。
本发明利用激光跟踪仪的测量数据闭环控制机械臂的运动,可实现多轴孔高精度自动化对准,提高装配效率和鲁棒性。
权利要求书2页 说明书7页 附图4页CN 109093376 A 2018.12.28C N 109093376A1.一种基于激光跟踪仪的多轴孔自动化对准方法,其特征在于,该方法包括以下步骤:1)搭建多轴孔自动化对准系统;所述多轴孔自动化对准系统包括:一台激光跟踪仪,一个机械臂和一台计算机;所述激光跟踪仪与机械臂分别与计算机连接;2)选取待对准的带孔部件和带轴部件,其中带孔部件具有N个孔,带轴部件具有N个轴,N大于等于3;令带孔部件固定不动,将带轴部件安装在机械臂的端面,令当前位置为初始位置;3)在带孔部件中选取任意三个不共线的孔建立带孔部件坐标系W1;具体步骤如下:3-1)在带孔部件用于建立带孔部件坐标系的三个孔的孔壁上,分别用激光跟踪仪的球形反射靶球或T-Prob的测量头上的球形红宝石紧贴每个孔壁并利用激光跟踪仪测量对应的球心坐标;测量时,每次选取孔壁上的一个点,每个孔壁上共测量P个不同点,P大于等于5,根据每个孔壁上选取的所有点的测量结果通过最小二乘法拟合对应孔壁的圆柱面,得到每个孔壁圆柱面的轴线即为对应孔的孔轴线,最终得到三个孔分别对应的轴线方程;3-2)在带孔部件的孔端面任意选取M个不共线的点,M大于等于3,将激光跟踪仪的球形反射靶球或T-Prob的测量头上的球形红宝石放置在每个点上并利用激光跟踪仪测量对应的球心坐标;利用每个点测量的球心坐标通过最小二乘法拟合带孔部件的孔端面平面得到初始孔端面平面方程,对初始孔端面平面方程沿平面法向向端面偏移靶球半径或球形红宝石半径的距离得到带孔部件孔端面的平面方程;3-3)分别计算带孔部件用于建立带孔部件坐标系的三个孔的轴线和孔端面的交点,得到三个交点,用三个交点建立带孔部件坐标系W1;4)在带轴部件中选取与建立带孔部件坐标系的三个孔对应的三个轴建立带轴部件坐标系W2;具体步骤如下:4-1)在带轴部件中选取与建立带孔部件坐标系的三个孔对应的三个轴,重复步骤3-1),得到带轴部件三个轴的轴线方程;4-2)重复步骤3-2),在带轴部件的轴端面任意选取L个不共线的点,L大于等于3,利用L 个不共线的点的测量结果拟合带轴部件轴端面平面,得到带轴部件轴端面的平面方程;4-3)分别计算带轴部件用于建立带轴部件坐标系的三条轴线和轴端面的三个交点,建立带轴部件坐标系W2;5)根据带孔部件坐标系W1和带轴部件坐标系W2分别计算两坐标系之间的旋转矩阵R和平移向量T;其中,T=O1-O2-[D 0 0]T式中,O1为坐标系W1的原点坐标列向量,O2为坐标系W2的原点坐标列向量,D为偏置距离;R=[X1 Y1 Z1][X2 Y2 Z2]-1式中,X1为W1中X轴的方向列向量,Y1为W1中Y轴的方向列向量,Z1为W1中Z轴的方向列向量,X2为W2中X轴的方向列向量,Y2为W2中Y轴的方向列向量,Z2为W2中Z轴的方向列向量;6)在带轴部件上安装4个不共线的反射靶球,根据旋转矩阵R和平移向量T计算带轴部件上安装的4个反射靶球分别对应的目标位置;设四个反射靶球在初始位置坐标分别为p1、p2、p3、p4,该4个反射靶球的目标位置分别为p′1、p′2、p′3、p′4,则:p′i=Rp i+T i=1~47)获取机械臂的初始雅可比矩阵;从初始位置开始,通过迭代控制机械臂的运动,使得带轴部件逐渐靠近带孔部件,最终实现带轴部件和带孔部件的对准;具体步骤如下:7-1)令机械臂通过六次独立的试探运动得到一个初始雅可比矩阵J0,具体做法为:每次运动机械臂的一个自由度,设第i个自由度的运动量为Δαi,则机械臂第i个自由度的运动导致的4个靶球坐标向量改变量分别为令则:7-2)从初始位置开始,通过迭代控制机械臂的运动,使得带轴部件逐渐靠近带孔部件,最终实现带轴部件和带孔部件的对准;具体步骤如下:7-2-1)计算4个反射靶球在第k步迭代中期望实现的坐标增量ΔP k:ΔP k=λ(P′-P k)其中,P′为4个反射靶球的目标位置坐标向量,P k为4个反射靶球第k步迭代时的坐标向量,P ik为第i个靶球在第k步迭代时的坐标,λ是用来控制机械臂运动范围的步长系数,λ<1;7-2-2)利用第k-1步迭代时估计的第k步迭代的雅可比矩阵计算机械臂各关节在第k步迭代时的增量;表达式如下:其中,Δθk为第k步迭代时机械臂各个关节运动的增量,是第k-1步迭代时估计的第k 步迭代的雅可比矩阵;7-2-3)根据步骤7-2-2)的计算结果,控制机械臂按照Δθk实现各关节对应的运动增量;利用卡尔曼滤波算法估计第k+1步迭代的雅可比矩阵,表达式如下:其中是第k步迭代后反射靶球实际坐标增量;7-2-4)重复步骤7-2-1)至7-2-3),直到4个反射靶球到达对应的目标位置,从而实现带轴部件与带孔部件的对准。