基本滤波算法-维纳滤波+卡尔曼滤波+自适应滤波
- 格式:pptx
- 大小:5.57 MB
- 文档页数:109
常用数字滤波算法
常用的数字滤波算法包括:
1. 移动平均滤波(Moving Average Filter):通过对一段时间内的
样本值取平均值来减小噪音的影响。
2. 中值滤波(Median Filter):通过将一组样本值按大小排序,然
后选择中间值作为滤波结果,从而去除异常值的影响。
3. 限幅滤波(Clipping Filter):将样本值限制在一个给定范围内,超出范围的值被替换为边界值,从而去除异常值的影响。
4. 卡尔曼滤波(Kalman Filter):基于状态估计的滤波算法,使用
模型预测和观测值校正的方式,适用于动态系统的滤波和估计。
5. 维纳滤波(Wiener Filter):根据信噪比的估计,利用频域的自
相关函数和谱估计对信号进行滤波,适用于去除加性噪声。
6. 自适应滤波(Adaptive Filter):根据输入信号的统计特性不断
更新滤波器参数,以动态调整滤波器的性能,适用于非平稳信号的滤波。
7. 快速傅里叶变换滤波(FFT Filter):通过将时域信号转换为频
域信号,滤除不需要的频率分量,然后再将频域信号转换回时域信号。
这些算法可以根据具体应用的需要选择合适的滤波方法。

自适应卡尔曼滤波算法
自适应卡尔曼滤波算法是一种基于最小均方差(MSE)
的自适应信号处理算法,它可以有效地实现过滤器的自适应调节,从而提高过滤器的准确性和稳定性。
自适应卡尔曼滤波算法在实际应用中广泛用于信号处理,其中包括无线电定位、航空控制、声纳定位、信号增强等。
特别是在环境条件变化较大的场景中,它可以有效地抑制噪声干扰,提高信号处理的精度。
另外,自适应卡尔曼滤波算法还可以被用于无人机的跟踪和导航,用于数据检测和分析等。
它可以根据实时的环境条件,自动调节滤波器的参数,从而提高无人机的定位和精度。
总之,自适应卡尔曼滤波算法是一种具有高适应性和高精度的信号处理算法,它可以有效地实现过滤器的自适应调节,抗干扰能力强,可以应用于在实际环境中的信号处理和无人机的跟踪和导航等。
维纳滤波和卡尔曼滤波
哇塞!同学们,你们听说过维纳滤波和卡尔曼滤波吗?反正一开始我是完全不知道这俩是啥玩意儿。
就好像在一个神秘的科学王国里,突然冒出来两个奇怪的名字。
维纳滤波,这名字听起来是不是有点像某个超级英雄的技能?可它不是用来拯救世界的,而是在信号处理的世界里大展身手呢!
有一次上科学课,老师讲起维纳滤波,我那叫一个懵啊!老师说它就像是一个超级聪明的小助手,能把那些乱糟糟的信号变得整整齐齐。
我就想,这难道是有魔法吗?比如说,我们听到的广播里有时候会有沙沙的杂音,维纳滤波就能把这些杂音去掉,让声音变得清晰又好听。
这难道不神奇吗?
再说卡尔曼滤波,它就像是一个预测大师。
比如说,我们预测明天会不会下雨,可能不太准。
但卡尔曼滤波就能根据一堆的数据和信息,更准确地预测出一些变化。
我问同桌:“你能明白这俩滤波是咋回事不?”同桌摇摇头说:“我也迷糊着呢!”
后来老师又举了个例子,说维纳滤波好比是个精心整理房间的小管家,把房间里乱七八糟的东西归置得井井有条;卡尔曼滤波呢,就像是个能提前知道你需要什么东西的小精灵,早早地就给你准备好。
哎呀,虽然听了老师这么多例子,我还是觉得这俩滤波有点难理解。
不过我想,只要我努力学习,总有一天能搞清楚它们的!
同学们,你们是不是也和我一样,对维纳滤波和卡尔曼滤波充满了好奇和探索的欲望呢?反正我是下定决心要把它们弄明白啦!。
卡尔曼滤波自适应滤波标题:卡尔曼滤波:智能自适应滤波算法助您尽享清晰生动的数据引言:在信息处理领域中,准确获取和处理数据是关键问题之一。
而卡尔曼滤波作为一种智能自适应滤波算法,不仅能够提供准确的数据处理结果,还能在复杂的环境中适应数据的变化,为我们的决策提供准确的指导。
本文将向您介绍卡尔曼滤波的原理、应用范围以及算法流程,帮助您全面了解并灵活应用这一强大的滤波技术。
1. 卡尔曼滤波原理卡尔曼滤波是一种基于贝叶斯定理的滤波算法,通过观测数据和系统模型来估计真实的状态。
其核心思想是将预测值和观测值进行加权平均,得到更准确的估计结果。
卡尔曼滤波算法的独特之处在于它能够适应环境变化,根据观测数据和预测模型的误差来动态地调整权重,从而提高滤波效果。
2. 卡尔曼滤波的应用范围卡尔曼滤波在各个领域都有重要应用。
例如在导航系统中,卡尔曼滤波可以用来估计车辆的位置和速度,从而提供准确的导航信息;在无线通信领域,卡尔曼滤波可以用来消除信号噪声,提高信号的可靠性和传输性能;在机器人技术中,卡尔曼滤波可以用来估计机器人的位置和运动轨迹,实现精确控制和导航等。
3. 卡尔曼滤波算法流程卡尔曼滤波算法包括两个主要步骤:预测和更新。
首先,根据系统模型和上一步的估计结果,预测当前的状态和误差协方差矩阵。
然后,根据观测数据和模型预测的值,通过计算卡尔曼增益来更新状态和误差协方差矩阵。
这个过程不断迭代,最终得到准确的估计结果。
4. 卡尔曼滤波的优势和指导意义卡尔曼滤波具有以下优势和指导意义:- 自适应性:卡尔曼滤波可以根据环境变化调整权重,适应不同的数据特征,提高滤波效果;- 实时性:卡尔曼滤波具有快速响应的特点,可以实时处理大量数据,满足实时应用的需求;- 精确性:卡尔曼滤波通过融合预测值和观测值,提供准确的估计结果,为决策提供可靠的依据。
结论:卡尔曼滤波作为一种智能自适应滤波算法,其在各个领域的应用范围广泛,并且具有自适应性、实时性和精确性的优势。
自适应滤波算法原理与应用经典的滤波算法包括,维纳滤波,卡尔曼滤波,自适应滤波。
维纳滤波与卡尔曼滤波能够满足一些工程问题的需求,得到较好的滤波效果。
但是他们也存在局限性,对于维纳滤波来说,需要得到足够多的数据样本时,才能获得较为准确的自相关函数估计值,一旦系统设计完毕,滤波器的长度就不能再改变,这难以满足信号处理的实时性要求;对于卡尔曼滤波,需要提前对信号的噪声功率进行估计,参数估计的准确性直接影响到滤波的效果。
在实际的信号处理中,如果系统参数能够随着输入信号的变化进行自动调整,不需要提前估计信号与噪声的参数,实现对信号的自适应滤波,这样的系统就是自适应滤波系统.1。
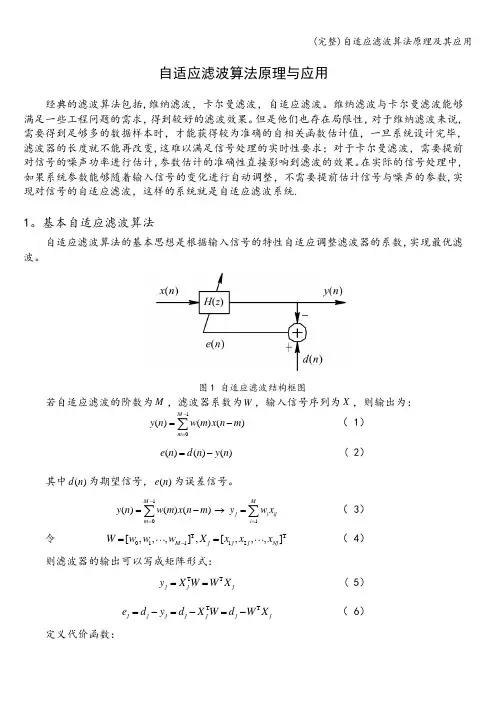
基本自适应滤波算法自适应滤波算法的基本思想是根据输入信号的特性自适应调整滤波器的系数,实现最优滤波。
图1 自适应滤波结构框图若自适应滤波的阶数为M ,滤波器系数为W ,输入信号序列为X ,则输出为: 10()()()M m y n w m x n m -==-∑( 1)()()()e n d n y n =-( 2)其中()d n 为期望信号,()e n 为误差信号。
11()()()M Mj i ij m i y n w m x n m y w x -===-→=∑∑( 3) 令T T 01112[,,,],[,,,]M j j j Nj W w w w X x x x -==( 4)则滤波器的输出可以写成矩阵形式: T Tj jj y X W W X == ( 5)T Tj j j j j jj e d y d X W d W X =-=-=- ( 6)定义代价函数:222()[][()][()]j j j T j j J j E e E d y E d W X ==-=- ( 7)当使上式中的代价函数取到最小值时,认为实现最优滤波,这样的自适应滤波成为最小均方自适应滤波(LMS)。
对于最小均方自适应滤波,需要确定使得均方误差最小的滤波器系数,一般使用梯度下降法求解这类问题。

主题:维纳滤波、最小二乘滤波、自适应滤波认知一、维纳滤波1. 维纳滤波是一种经典的线性滤波方法,它是以诺伯特·维纳(Norbert Wiener)命名的,主要用于信号和图像处理领域。
2. 维纳滤波是一种频域滤波方法,它利用信号和噪声的功率谱以及它们之间的相关性来进行滤波处理。
3. 维纳滤波通过最小化信号和噪声的均方误差来实现信号的恢复,能够有效地抑制噪声并增强信号的特征。
4. 维纳滤波的优点是对信噪比较低的图像有很好的处理效果,但缺点是对信噪比较高的图像处理效果较差。
二、最小二乘滤波1. 最小二乘滤波是一种基于统计原理的滤波方法,它通过对信号进行线性估计来实现滤波处理。
2. 最小二乘滤波与维纳滤波类似,都是以最小化均方误差为目标,但最小二乘滤波是基于时域的方法。
3. 最小二乘滤波将信号和噪声视为随机过程,利用信号和噪声的统计特性来进行滤波处理,能够提高信号的估计精度。
4. 最小二乘滤波的优点是对于信号和噪声的统计特性要求不高,处理效果比较稳定,但缺点是需要较强的计算能力和较大的样本量。
三、自适应滤波1. 自适应滤波是基于滑动窗口的滤波方法,它根据信号的局部特性动态调整滤波参数,适用于信号和噪声变化较大的场景。
2. 自适应滤波主要包括自适应均值滤波、自适应中值滤波、自适应加权滤波等不同类型,根据不同的信号特征选择相应的滤波方法。
3. 自适应滤波能够有效地抑制信号中的噪声和干扰,同时保留信号的边缘和细节特征,具有较好的空间适应性。
4. 自适应滤波的优点是能够根据信号的实际情况自动调整滤波参数,适用性广泛;但缺点是计算量大,实时性较差。
维纳滤波、最小二乘滤波和自适应滤波都是常用的信号和图像处理方法,它们各自具有特定的优点和适用场景。
在实际应用中,可以根据信号的特性和处理需求选择合适的滤波方法,以达到更好的处理效果。
对于不同的滤波方法,还可以结合其他技术手段进行改进和优化,以满足不同场景的需求。
资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载维纳滤波与卡尔曼滤波地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容第二章维纳滤波与卡尔曼滤波§2.1 引言信号处理的实际问题,常常是要解决在噪声中提取信号的问题,因此,我们需要寻找一种所谓有最佳线性过滤特性的滤波器。
这种滤波器当信号与噪声同时输入时,在输出端能将信号尽可能精确地重现出来,而噪声却受到最大抑制。
维纳(Wiener)滤波与卡尔曼(Kalman)滤波就是用来解决这样一类从噪声中提取信号问题的一种过滤(或滤波)方法。
实际上这种线性滤波问题,可以看成是一种估计问题或一种线性估计问题。
一个线性系统,如果它的单位样本响应为h(n),当输入一个随机信号x(n),且(2.1)其中s(n)表示信号,表示噪声,则输出y(n)为(2.2)我们希望x(n)通过线性系统h(n)后得到的y(n)尽量接近于s(n),因此称y(n)为s(n)的估计值,用表示,即(2.3)图2.1 维纳滤波器的输入—输出关系如图2.1所示。
这个线性系统称为对于s(n)的一种估计器。
实际上,式(2.2)的卷积形式可以理解为从当前和过去的观察值x(n),x(n-1),x(n-2)…x(n-m),…来估计信号的当前值。
因此,用进行过滤的问题可以看成是一个估计问题。
由于我们现在涉及的信号是随机信号,所以这样一种过滤问题实际上是一种统计估计问题。
一般,从当前的和过去的观察值x(n),x(n-1),x(n-2),…估计当前的信号值称为过滤或滤波;从过去的观察值,估计当前的或将来的信号值称为预测或外推;从过去的观察值,估计过去的信号值称为平滑或内插。
因此维纳过滤与卡尔曼过滤又常常被称为最佳线性过滤与预测或线性最优估计。
实验五不同滤波器的比较比较维纳滤波器、卡尔曼滤波器、匹配滤波器、自适应滤波器的异同一、维纳滤波器维纳滤波器是由数学家维纳提出的一种以最小平方为最优准则的线性滤波器。
在一定的约束条件下,其输出与一给定函数(通常称为期望输出)的差的平方达到最小,通过数学运算最终可变为一个托布利兹方程的求解问题。
维纳滤波是利用平稳随机过程的相关特性和频谱特性对混有噪声的信号进行滤波的方法。
设维纳滤波器的输入为含噪声的随机信号。
期望输出与实际输出之间的差值为误差,对该误差求均方,即为均方误差。
因此均方误差越小,噪声滤除效果就越好。
为使均方误差最小,关键在于求冲激响应。
如果能够满足维纳-霍夫方程,就可使维纳滤波器达到最佳。
根据维纳-霍夫方程,最佳维纳滤波器的冲激响应,完全由输入自相关函数以及输入与期望输出的互相关函数所决定。
维纳滤波器的优点是适应面较广,无论平稳随机过程是连续的还是离散的,是标量的还是向量的,都可应用。
对某些问题,还可求出滤波器传递函数的显式解,并进而采用由简单的物理元件组成的网络构成维纳滤波器。
维纳滤波器的缺点是,要求得到半无限时间区间内的全部观察数据的条件很难满足,同时它也不能用于噪声为非平稳的随机过程的情况,对于向量情况应用也不方便。
因此,维纳滤波在实际问题中应用不多。
实现维纳滤波的要求是:①输入过程是广义平稳的;②输入过程的统计特性是已知的。
根据其他最佳准则的滤波器亦有同样要求。
二、卡尔曼滤波器卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。
状态估计是卡尔曼滤波的重要组成部分。
一般来说,根据观测数据对随机量进行定量推断就是估计问题,特别是对动态行为的状态估计,它能实现实时运行状态的估计和预测功能。
最常用的是最小二乘估计,线性最小方差估计、最小方差估计、递推最小二乘估计等。
卡尔曼提出的递推最优估计理论,采用状态空间描述法,在算法采用递推形式,卡尔曼滤波能处理多维和非平稳的随机过程。