第12讲 网格划分方法
- 格式:ppt
- 大小:1012.00 KB
- 文档页数:16
划分网格的方1.独立实体(independent instance)和非独立实体(dependent instance)对非独立实体划分网格时,应在窗口顶部的环境栏中把Object选项设为part,即对部件划分网格;对独立实体划分网格时, 应在窗口顶部的环境栏中把Object选项设为assembly,即对装配件划分网格2.网格单元形状在MESH功能模块中,Mesh—Controls,弹出Mesh Controls对话框,其中可选择单元形状。
2D问题,有以下可供选择的单元形状。
1)Quad:网格中完全使用四边形单元;2)Quad-dominated:网格中主要使用四边形单元,但在过渡区域允许出现三角形单元。
选择Quad-dominated类型更容易实现从粗网格到细网格的过渡;3)Tri:网格中完全使用三角形单元;对于3D问题,包括以下可供选择的单元形状:1)Hex:网格中完全使用六面体单元;2)Hex-dominated:网格中主要使用六面体单元,但在过渡区域允许出现楔形(三棱柱)单元;3)Tet:网格中完全使用四面体单元;4)Wedge:网格中完全使用楔形单元;Quad(2D问题)和Hex(3D问题)可以用较小的计算代价得到较高的精度,应尽可能选择这两种单元。
3.网格划分技术Structured(结构化网格):采用结构化网格的区域显示为绿色;Sweep(扫掠网格):采用扫掠网格的区域显示为黄色;Free(自由网格):采用自由网格的区域显示为粉红色;自由网格技术采用Tri和Tet,一般应选择带内部节点的二次单元来保证精度;结构化网格和扫掠网格一般采用Quad和Hex单元,分析精度相对较高。
4.划分网格的算法使用Quad和Hex单元划分网格时,有两种可供选择的算法:Medial Axis(中性轴算法)和Advancing Front(进阶算法)。
Medial Axis(中性轴算法):首先把要划分网格的区域分成一些简单的区域,然后使用结构化网格划分技术来为简单区域划分网格。
第4章网格划分的处理内容提要主要介绍模型网络的划分和网格缺陷的处理方法,为Moldflow分析的前处理打好基础。
学习重点网格划分方法、网格缺陷诊断处理方法。
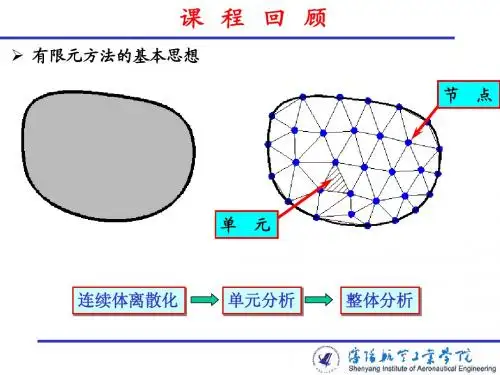
4.1 前言Moldflow作为成功的注塑产品成型仿真及分析软件,采用的基本思想也是工程领域中最常用的有限元方法。
简单来说,有限元方法就是利用假想的线(或面)将连续介质的内部和边界分割成有限大小的,有限数目的,离散的单元来研究。
这样,就把原来一个连续简化成有限个单元的体系,从而得到真实的结构的近似模型,最终的数值计算就是在这个离散花的模型上进行的。
直观上,物体被划分成“网格”状,在Moldflow中我们就将这些单元称为网格(mesh)。
如图4-1所示。
正因为网格在整个数值防真计算的基础,所以网格的划分和处理在整个Moldflow分析中占有很重要的地位。
4.2网格的类型在Moldflow中,划分成网格主要有三种类型:中面网格(Midplane),表面网格(Fusion)和实体网格(3D),如图4-2所示。
中面网格(Midplane)是有三节点的三角形单元组成的,网格创建在模型壁厚的中间处,形成单格网格。
在创建中面网格的过程中,要实时提取模型的壁厚信息,并赋予相应的三角单元。
表面网格(Fusion)也是由三节点的三角形单元组成,与中面网格不同,他是创建在模型的上下两层表面上。
实体网格(3D)是有四节点和四面体单元组成,每一个四面体单元又是四个Midplane 模型中的三角单元组成的,利用3D网格可以更为精确地进行三维流动防真。
4.3 网格的划分首先,在已经建好的项目中导入所用模型,如图4-3,选择Import命令后,在对话框中打开模型文件,此时会弹出一个对话框4-4。
接着,在图4-4的对话框中,选择网格划分类型,包括Midplane,Fusion,和Solid (3D)三种,同时还要选择导入模型所采用的单位,包括Millimeter(毫米),Centimeter(厘米),Meter(米)和Inch(英寸)。
第 3章 ANSYS 13.0 Workbench网格划分及操作案例网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。
网格直接影响到求解精 度、求解收敛性和求解速度。
此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。
因此,一个越好的自动化网格工具,越能得到好的解决方案。
3.1 ANSYS 13.0 Workbench 网格划分概述ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。
此外,变化参数可以得到即时更新的网 格。
ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。
网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。
可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。
在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。
ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。
作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFXMESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。
【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。
不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。

第3章网格划分技术及技巧-图文创建几何模型后,必须生成有限元模型才能分析计算,生成有限元模型的方法就是对几何模型进行网格划分,网格划分主要过程包括三个步骤:⑴定义单元属性单元属性包括单元类型、实常数、材料特性、单元坐标系和截面号等。
⑵定义网格控制选项★对几何图素边界划分网格的大小和数目进行设置;★没有固定的网格密度可供参考;★可通过评估结果来评价网格的密度是否合理。
⑶生成网格★执行网格划分,生成有限元模型;★可清除已经生成的网格并重新划分;★局部进行细化。
3.1定义单元属性3.1.1单元类型1.定义单元类型命令:ET,ITYPE,Ename,KOP1,KOP2,KOP3,KOP4,KOP5,KOP6,INOPRITYPE---用户定义的单元类型的参考号。
KOP1~KOP6---单元描述选项,此值在单元库中有明确的定义,可参考单元手册。
也可通过命令KEYOPT进行设置。
INOPR---如果此值为1则不输出该类单元的所有结果。
例如:et,1,link8!定义LINK8单元,其参考号为1;也可用ET,1,8定义et,3,beam4!定义BEAM4单元,其参考号为3;也可用ET,3,4定义2.单元类型的KEYOPT命令:KEYOPT,ITYPE,KNUM,VALUEITYPE---由ET命令定义的单元类型参考号。
KNUM---要定义的KEYOPT顺序号。
VALUE---KEYOPT值。
该命令可在定义单元类型后,分别设置各类单元的KEYOPT参数。
例如:et,1,beam4!定义BEAM4单元的参考号为1et,3,beam189!定义BEAM189单元的参考号为3keyopt,1,2,1!BEAM4单元考虑应力刚度时关闭一致切线刚度矩阵keyopt,3,1,1!考虑BEAM189的第7个自由度,即翘曲自由度!当然这些参数也可在ET命令中一并定义,如上述四条命令与下列两条命令等效:et,1,beam4,,1et,3,beam189,13.自由度集命令:DOF,Lab1,Lab2,Lab3,Lab4,Lab5,Lab6,Lab7,Lab8,Lab9,Lab104.改变单元类型命令:ETCHG,Cnv5.单元类型的删除与列表删除命令:ETDELE,ITYP1,ITYP2,INC列表命令:ETLIST,ITYP1,ITYP2,INC3.1.2实常数1.定义实常数命令:R,NSET,R1,R2,R3,R4,R5,R6续:RMORE,R7,R8,R9,R10,R11,R12NSET---实常数组号(任意),如果与既有组号相同,则覆盖既有组号定义的实常数。
网格算法的原理
网格算法是一种常用的计算机图形学算法,用于将二维空间划分为规则的网格格点,以实现图形模型的离散化表示和各类计算操作。
其原理是将整个空间划分为一个个小的单元格,每个单元格都具有固定的大小。
网格算法的主要思想是将空间划分为一系列的网格单元,每个单元格代表了一个离散化的小区域。
这些单元格可以用于表示图形对象的形状、位置、颜色等属性。
在网格算法中,常用的单元格形状包括正方形和长方形。
每个单元格可以表示一个像素、一个点或者更大的对象。
其中,最小的单元格称为基本单元。
通过将空间划分为网格单元,可以将图形模型转换为离散化的数据结构。
这样,可以使用一组有限的数据结构来表示整个图形模型,从而简化图形模型的处理和操作。
网格算法的主要应用包括图形渲染、图形碰撞检测、物理模拟等。
在图形渲染中,可以根据每个网格单元的属性来确定其颜色,从而生成图像。
在图形碰撞检测中,可以通过判断不同网格单元是否相交来判断碰撞是否发生。
在物理模拟中,可以根据每个网格单元的属性来计算物理效应,如重力、摩擦力等。
总之,网格算法通过将空间划分为网格单元,将图形模型离散化表示,以实现各种计算操作。
这种离散化的表示方式使得图形计算更加高效和方便。
转自宋博士的博客如何在ANSYS WORKBENCH中划分网格经常有朋友问到这个问题。
我整理了一下,先给出第一个入门篇,说明最基本的划分思路。
以后再对某些专题问题进行细致阐述。
ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。
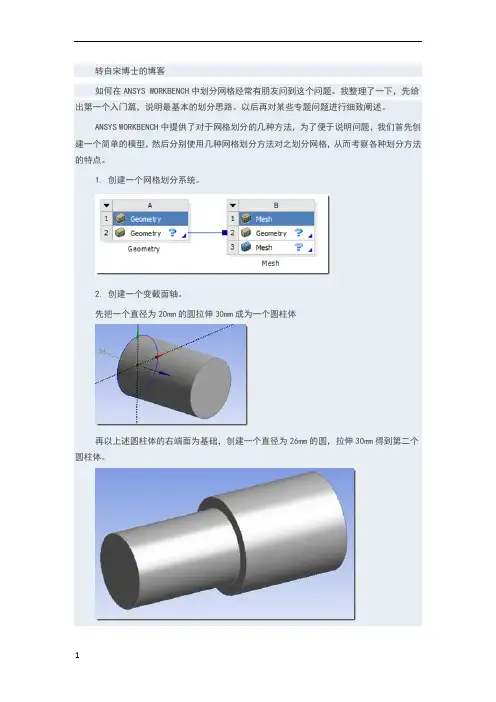
1. 创建一个网格划分系统。
2. 创建一个变截面轴。
先把一个直径为20mm的圆拉伸30mm成为一个圆柱体再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。
对小圆柱的端面倒角2mm。
退出DM.3.进入网格划分程序,并设定网格划分方法。
双击mesh进入到网格划分程序。
下面分别考察各种网格划分方法的特点。
(1)用扫掠网格划分。
对整个构件使用sweep方式划分网格。
结果失败。
该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。
(2)使用多域扫掠型网格划分。
结果如下可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。
这是最合适的网格划分方法。
(3)使用四面体网格划分方法。
使用四面体网格划分,且使用patch conforming算法。
可见,该方式得到的网格都是四面体网格。
且在倒角处网格比较细密。
其内部单元如下图(这里剖开了一个截面)使用四面体网格划分,但是使用patch independent算法。
忽略细节。
、网格划分结果如下图此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。
(4)使用自动网格划分方法。
得到的结果如下图该方法实际上是在四面体网格和扫掠网格之间自动切换。
当能够扫掠时,就用扫掠网格划分;当不能用扫掠网格划分时,就用四面体。
这里不能用扫掠网格,所以使用了四面体网格。
(5)使用六面体主导的网格划分方法。
得到的结果如下该方法在表面用六面体单元,而在内部也尽量用六面体单元,当无法用六面体单元时,就用四面体单元填充。
ANSYS Workbench局部网格划分方法介绍网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。
网格直接影响到求解精度、求解收敛性和求解速度。
此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所耗费时间中的一个重要部分。
因此,一个越好的自动化网格工具,越能得到好的解决方案。
本文重点介绍ANSYS Workbench局部网格划分方法。
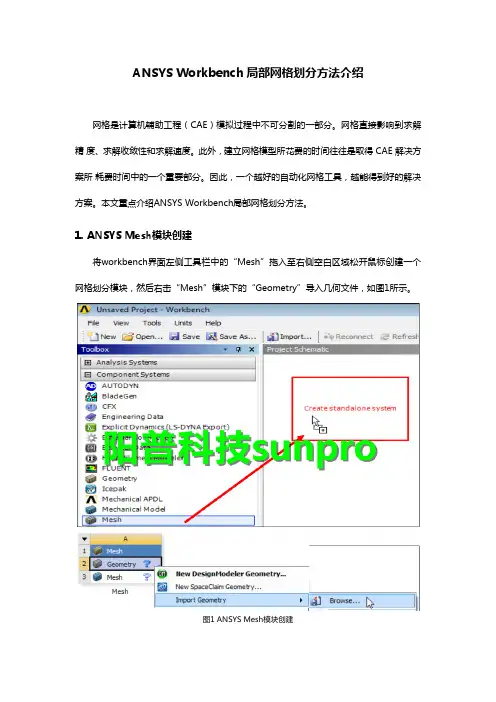
1.ANSYSMesh模块创建将workbench界面左侧工具栏中的“Mesh”拖入至右侧空白区域松开鼠标创建一个网格划分模块,然后右击“Mesh”模块下的“Geometry”导入几何文件,如图1所示。
图1 ANSYS Mesh模块创建2.ANSYS Mesh网格划分方法右击“Mesh”后,插入网格划分方法,如图2所示。
图2插入网格划分方法ANSYS Mesh网格划分方法包括自动划分、四面体、六面体主导、扫略和多区五种网格划分方法,如图3所示。
图3 网格划分方法其中扫略的网格划分方法适用于规则的几何体(源面和目标面拓扑结构一致),可生成高质量的六面体单元或六面体与棱柱体组合单元;六面体为主导的网格划分方法适用于形状较为复杂的体,体表面以六面体划分,内部不能使用六面体划分的区域用四面体填充;四面体的网格划分方法适用于形状特别复杂的体;多区的网格划分方法,程序自动把复杂的几何体切割若干规则的几何体,然后再使用扫略划分方法。
图4列出了采用不同网格划分方法的得到的有限元模型。
(a)自动网格划分(b)四面体网格划分(c)六面体主导网格划分(d)多区网格划分图4采用不同网格划分方法得到的有限元模型3.可消除细小特征的网格划分方法导入至Workbench的几何模型在某一面上存在细小特征(9个圆圈),如图5所示。
若直接进行网格划分,会在圆圈附近加密网格,,这样会使网格数量大大增加,从而延长计算时间。
通常的做法是在ANSYS几何处理模块(Spaceclaim或DesignModeler)中将这些圆圈事先删除,然后再进行网格划分。
(完整版)网格划分设计知识点汇总一、网格设计而非划分在进行数值模拟计算(包括FEA、CFD等)中,网格的质量对分析计算的结果有至关重要的影响。
高质量的网格是高精度分析结果的保证,而质量不好或者差的网格,则可能会导致计算的无法完成或者得到无意义的结果。
划分网格是需要认真考虑的,它内部的计算方程需要设计出好的网格,计算才能更准确。
在一个完整的分析计算过程中,与网格设计和修改相关的前处理工作占到了CAE工程师工作量的70-80%,CAE工程师往往要花费大量的时间来进行网格处理,真正用于分析计算的时间很少,所以主要的瓶颈在于如何快速准备好高质量的满足分析计算要求的网格。
该项工作对技术人员的技术经验和背景有相当高的要求。
具体的说,就是要求前处理工程师能够根据CAE工程师提出的分析要求“设计”出能满足CAE工程师分析要求的合适的网格,然后提交给CAE工程师进行分析计算。
之所以是网格“设计”而不是网格“划分”,说明了要设计出能够满足分析计算要求的高质量的网格,并不是一件容易的事情,要完成这项工作需要很多方面的知识和技术要求。
针对一个具体的分析计算要求,要获得一个满足该分析计算的高质量网格,需要从以下几个方面进行综合考虑:1.分析计算的目的(定性还是定量?)。
2.分析计算的类型,如强度分析、刚度分析、耐久性分析、NVH 分析、碰撞分析、CFD分析、热流分析、动力学响应分析等。
(不同的分析类型对网格的质量和形状有不同的要求。
)3.分析计算的时间要求。
(要求时间的紧迫与否也决定了采用何种网格形式)4.分析计算所采用的求解器。
(不同的求解器对不同的分析问题有特定的网格形式和要求)5.分析计算可能应用的单元类型。
(所应用的求解器可以采用的单元类型,也会决定网格的质量与形状要求)6. 尽可能采用最好的网格类型。
(对于面,尽可能采用四边形网格;对于体,尽可能采用六面体单元)由此可见,满足计算分析要求的高质量的网格是由前处理工程师精心“设计”出来的,而不是随随便便“划分”出来的。
FLOTHERM 专题之网格划分一、网格划分思路1、建立几何模型后,软件自带四种网格划分类型“None, Coarse, Medium, Fine”, 建议选择”None”型.2、在Grid Summary 中,检查细小网格(三个不同方向)所在位置,通过调整物体尺寸消除较小单元,提高最小网格单元数量级.3、针对不同区域,采用局域化网格.在网格单元控制参数中,建议采用控制最大单元尺寸选项.4、调整系统网格,通过控制Maxsize和Smooth来使系统网格长宽比控制在最佳范围内.二、网格质量检查1、在系统网格( )数据栏中检查局域化网格长宽比2、在Drawing Board中检查局域化网格在当前模式中选中Workplane选择Workplane (灰色轮廓) ,使用鼠标或键盘通过来移动平面三、局域化网格1、–单个物体进行设置.☆选择物体☆设置网格约束(注意:可在各个方向可独立设置不同网格约束.) ☆按图标,进行局域化操作.☆检查Drawing Board…2、采用Region将多个物体”包”起来☆包含三个物体的组☆绘制region☆添加网格约束☆局域化3、我们来分析一个采用局域化网格的散热器模型…存在两个问题解决的办法是将网格约束做膨胀设置4、局域化网格区域之间可以相互嵌套5、局域化网格不能相互部分重叠,但可以紧邻.(包括膨胀区域)如果有部分重叠的局域化网格,可以采用多个相邻局域化空间来组合完成,避免产生网格冲突.6、重要原则☆采用调整系统网格来控制局域化区域以外的网格质量.☆划分原则(1) 避免在矢量变化快的位置使用过渡性局域化网格(边界层)(2) 适当的过度区域比例要根据实际问题而设定(3) 在一些具有适量剃度变化快的区域,采用较小尺寸网格(没有通用的比例范围适合所有的领域)(4) 长宽比一般尽可能接近1为佳.< 20 –较好>200 –可以接受(5) 相邻网格之间的变化尽量缩小☆如果相邻网格之间尺寸比例大于10:1,会大大增加求解时间.四、网格约束1、网格约束用于在几何实体上设定网格2、设置Minimum Number和Maximum Size 分别设置最小单元数,或者最大网格单元尺寸.建议采用Maximum Size.Minimum Size是设置最小网格尺寸,可以控制网格精度3、网格约束(膨胀)(1) 膨胀可以使网格约束延伸到物体边界以外的区域.☆膨胀区域可以按照尺寸大小或物体比例来定义☆可以通过定义最小单元数或最大单元尺寸来控制网格☆不同的膨胀可以单独设置在正,反两个方向.(2) 我们来看一下前面的例子…Low 方向约束定义为10%尺寸内最小划分两个网格单元设置High 方向约束定义为100mm内最大网格尺寸10mm设置4、使用Region定义网格约束网格约束可以用于Region,这样可以应用于无几何实体的空间场所例如,在两平板间增加网格定义几何尺寸定义Region帖附网格约束检查网格五、划分准则:1、网格长宽比值越接近越好1 最理想的状态< 20 良好>200 可能造成不收敛2、尽量避免大尺寸网格到小尺寸网格的直接过度3、网格长宽比例问题网格平滑工具(系统网格)--增加网格线减小长宽比网格平滑工具(系统网格)--增加网格线减少网格过度问题的产生最小单元尺寸(系统网格)建立合理精度的模型(例如,根据实际问题的大小确定尺寸单位精度)避免产生小尺寸网格导致较大差异的网格过渡5、扩大求解域的影响当我们扩大求解域时,必然增加整个系统网格数.这主要是因为物体几何网格线延伸到整个求解域边界, 同时会增加求解计算时间.解决办法是将整个装置采用局域化处理. 产生两类网格。