模数与数模转换
- 格式:doc
- 大小:177.00 KB
- 文档页数:5
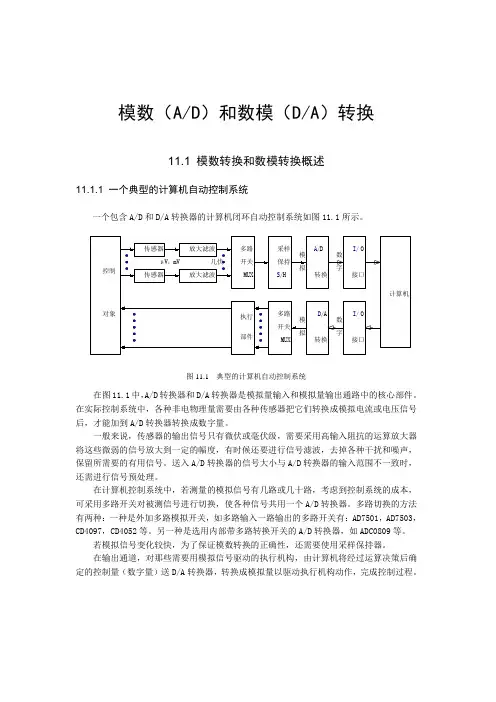
模数(A/D)和数模(D/A)转换11.1 模数转换和数模转换概述11.1.1 一个典型的计算机自动控制系统一个包含A/D和D/A转换器的计算机闭环自动控制系统如图11.1所示。
图11.1 典型的计算机自动控制系统在图11.1中,A/D转换器和D/A转换器是模拟量输入和模拟量输出通路中的核心部件。
在实际控制系统中,各种非电物理量需要由各种传感器把它们转换成模拟电流或电压信号后,才能加到A/D转换器转换成数字量。
一般来说,传感器的输出信号只有微伏或毫伏级,需要采用高输入阻抗的运算放大器将这些微弱的信号放大到一定的幅度,有时候还要进行信号滤波,去掉各种干扰和噪声,保留所需要的有用信号。
送入A/D转换器的信号大小与A/D转换器的输入范围不一致时,还需进行信号预处理。
在计算机控制系统中,若测量的模拟信号有几路或几十路,考虑到控制系统的成本,可采用多路开关对被测信号进行切换,使各种信号共用一个A/D转换器。
多路切换的方法有两种:一种是外加多路模拟开关,如多路输入一路输出的多路开关有:AD7501,AD7503,CD4097,CD4052等。
另一种是选用内部带多路转换开关的A/D转换器,如ADC0809等。
若模拟信号变化较快,为了保证模数转换的正确性,还需要使用采样保持器。
在输出通道,对那些需要用模拟信号驱动的执行机构,由计算机将经过运算决策后确定的控制量(数字量)送D/A转换器,转换成模拟量以驱动执行机构动作,完成控制过程。
287第11章 模数(A/D )和数模(D/A )转换 11.1.2 模/数转换器(ADC )的主要性能参数1. 分辨率它表明A/D 对模拟信号的分辨能力,由它确定能被A/D 辨别的最小模拟量变化。
一般来说,A/D 转换器的位数越多,其分辨率则越高。
实际的A/D 转换器,通常为8,10,12,16位等。
2. 量化误差在A/D 转换中由于整量化产生的固有误差。
量化误差在±1/2LSB (最低有效位)之间。


电路中的数模转换器与模数转换器电子设备在现代社会中扮演着重要的角色,而电路则是电子设备的基础。
在电路中,数模转换器和模数转换器是两种常见的组件,它们在数字信号和模拟信号之间起着桥梁的作用。
本文将就数模转换器和模数转换器进行探讨。
一、数模转换器数模转换器(DAC)是将数字信号转换为模拟信号的装置。
在电子设备中,数字信号通常是通过二进制编码来表示的,而模拟信号是连续变化的。
数模转换器的作用就是将数字信号转化为与之对应的模拟信号。
数模转换器通常由数字信号输入端、模拟信号输出端和控制端组成。
其中,数字信号输入端接收来自计算机或其他数字设备的二进制编码信号,而控制端可以进行精确的调节和控制。
通过内部的数学运算和电流输出,数模转换器能够将离散的数字信号转换为连续的模拟信号。
数模转换器在各个领域中都得到了广泛的应用。
在音频设备中,数模转换器能够将数字音频信号转换为模拟音频信号,使得人们能够用耳朵听到音乐。
在通信设备中,数模转换器则起到将数字信号转换为模拟信号的作用,使信息能够在物理媒介上传输。
二、模数转换器模数转换器(ADC)则是将模拟信号转换为数字信号的装置。
在电子设备中,模拟信号是连续变化的,而数字信号是离散的。
模数转换器的作用就是将模拟信号转化为与之对应的数字信号。
与数模转换器类似,模数转换器通常由模拟信号输入端、数字信号输出端和控制端组成。
模拟信号输入端接收来自传感器或其他模拟设备的信号,而控制端则用于对转换过程进行调节和控制。
通过内部的采样和量化处理,模数转换器能够将连续的模拟信号转换为离散的数字信号。
模数转换器同样在各个领域中发挥着重要作用。
在测量仪器中,模数转换器能够将模拟信号转换为数字信号,使得数据能够被处理和分析。
在自动控制系统中,模数转换器则起到将模拟输入转换为数字输入的作用,使得系统能够进行数字化的操作。
结语数模转换器和模数转换器在电子设备中起到了桥梁的作用,将数字信号和模拟信号进行转化。
3. 模数转换器 (1) 模/数(A/D)转换器 A/D转换器是模拟信号源与计算机或其它数字系统之间联系的桥梁,它的任务是将连续变化的模拟信号转换为数字信号,以便计算机或数字系统进行处理、存储、控制和显示。在工业控制和数据采集及其它领域中,A/D转换器是不可缺少的重要组成部分。 1) 逐次逼近型A/D转换器 逐次逼近型A/D转换器又称逐次渐近型A/D转换器,是一种反馈比较型A/D转换器。逐次逼近型A/D转换器进行转换的过程类似于天平称物体重量的过程。天平的一端放着被称的物体,另一端加砝码,各砝码的重量按二进制关系设置,一个比一个重量减半。称重时,把砝码从大到小依次放在天平上,与被称物体比较,如砝码不如物体重,则该砝码予以保留,反之去掉该砝码,多次试探,经天平比较加以取舍,直到天平基本平衡称出物体的重量为止。这样就以一系列二进制码的重量之和表示了被称物体的重量。例如设物体重11克,砝码的重量分别为1克、2克、4克和8克。称重时,物体天平的一端,在另一端先将8克的砝码放上,它比物体轻,该砝码予以保留(记为1),我们将被保留的砝码记为1,不被保留的砝码记为0。然后再将4克的砝码放上,现在砝码总和比物体重了,该砝码不予保留(记为0),依次类推,我们得到的物体重量用二进制数表示为1011。用下表7.1表示整个称重过程。
表7.1 逐次逼近法称重物体过程表 顺序 砝码(克) 比较 砝码取舍 1 8 8<11 取(1) 2 4 12>11 舍(0) 3 2 10<11 取(1) 4 1 11=11 取(1) 图7.7 逐次逼近型A/D转换器方框图
利用上述天平称物体重量的原理可构成逐次逼近型A/D转换器。 逐次逼近型A/D转换器的结构框图如图7.7所示,包括四个部分:电压比较器、D/A转换器、逐次逼近寄存器和顺序脉冲发生器及相应的控制逻辑。 逐次逼近型A/D转换器是将大小不同的参考电压与输入模拟电压逐步进行比较,比较结果以相应的二进制代码表示。转换开始前先将寄存器清零,即送给D/A转换器的数字量为0,三个输出门G7、G8、G9被封锁,没有输出。转换控制信号有效后(为高电平)开始转换,在时钟脉冲作用下,顺序脉冲发生器发出一系列节拍脉冲,寄存器受顺序脉冲发生器及控制电路的控制,逐位改变其中的数码。首先控制逻辑将寄存器的最高位置为1,使其输出为100……00。这个数码被D/A转换器转换成相应的模拟电压Uo,送到比较器与待转换的输入模拟电压Ui进行比较。若Uo>Ui,说明寄存器输出数码过大,故将最高位的1变成0,同时将次高位置1;若Uo≤Ui,说明寄存器输出数码还不够大,则应将这一位的1保留。数码的取舍通过电压比较器的输出经控制器来完成的。依次类推按上述方法将下一位置1进行比较确定该位的1是否保留,直到最低位为止。此时寄存器里保留下来的数码即为所求的输出数字量。 2) 并联比较型A/D转换器 并联比较型A/D转换器是一种高速A/D转换器。图8-9所示是3位并联型A/D转换器,
∞ + + 控制电路 寄存器
DAC
时序脉冲电路 数码输入 它由基准电压REFU、电阻分压器、电压比较器、寄存器和编码器等五部分组成。REFU是基准电压、iu是输入模拟电压,其幅值在0到REFU之间,012ddd是输出的3位二进制代码,CP是控制时钟信号。 由图8-9可知,由8个电阻组成的分压器将基准电压REFU分成8个等级,其中七个等级的电压接到7个电压比较器1C到7C的反相输入端,作为它们的参考电压,其数修正值分别为REFU/14、3REFU/14…13REFU/14。输入模拟电压iu同时接到每个电压比较器的同相输入端上,使之与7个参考电压进行比较,从而决定每个电压比较器的输出状态。 当iu0器都被置0状态。经编码器编码后输出的二进制代码为012ddd=0。 依次类推,可以列出iu为不同等级时寄存器的状态及相应的输出二进制数,如表8-1所示:
表8-1 双并联比较型A/D转换器真值表 并联比较型A/D转换器的最大优点是转换速度快,它是各种A/D转换器中速度最快的一种。这是因为输入信号电压iu同时加到电压比较器的所有输入端,从加入iu到二进制数的稳定输出所经历的时间为电压比较器、触发器和编码器的延迟时间之和。而且各位代码的转换几乎是同时进行的,增加输出代码位数对转换速度的影响很小。 并联比较型A/D转换器的主要缺点是使用的比较器和触发器较多。随着分辨率的提高,所需元件数目要按几何级数增加。输出为3位二进制代码时,需要电压比较器和触发器的个数均为23-1=7。当输出为n位二进制数时,需要个数为2n-1。例如:当n=10时,需要的电压比较器和触发器的个数均为210-1=1023。相应的编码器也变得复杂起来。显然,这种A/D转换器的成本高,价格贵,是不经济的。在一般场合较少使用。
(2) 模/数(A/D)转换器的主要技术性能 1.分辨率 分辨率是指A/D转换器输出数字量的最低位变化一个数码时,对应输入模拟量的变化量。通常以A/D转换器输出数字量的位数表示分辨率的高低,因为位数越多,量化单位就越小,对输入信号的分辨能力也就越高。例如,输入模拟电压满量程为10V,若用8位A/D转换器转换时,其分辨率为10V/28=39mV,10位的A/D转换器是9.76Mv,而12位的A/D转换器为2.44mV。 2.转换误差 转换误差表示A/D转换器实际输出的数字量与理论上的输出数字量之间的差别。通常以输出误差的最大值形式给出。转换误差也叫相对精度或相对误差。转换误差常用最低有效位的倍数表示。例如,某A/D转换的相对精度为±(1/2)LSB,这说明理论上应输出的数字量与实际输出的数字量之间的误差不大于最低位为1的一半。
输入模拟电压 寄存器状态 输出二进制数 iu 0D 1D 2D 3D 4D 5D 6D 7D 2d 0d 1d
(0-1/14)REFU 0 0 0 0 0 0 0 0 0 0 0 (1/14-3/14)REFU 0 0 0 0 0 0 0 1 0 0 1 (3/14-5/14)REFU 0 0 0 0 0 1 1 1 0 1 0 (5/14-7/14)REFU 0 0 0 0 1 1 1 1 0 1 1 (7/14-9/14)REFU 0 0 0 1 1 1 1 1 1 0 0 (9/14-11/14)REFU 0 0 1 1 1 1 1 1 1 0 1 (11/14-13/14)REFU 0 1 1 1 1 1 11 1 1 1 0 (13/14-1/14)REFU 1 1 1 1 1 1 1 1 1 1 1 3.转换速度 A/D转换器从接收到转换控制信号开始,到输出端得到稳定的数字量为止所需要的时间,即完成一次A/D转换所需的时间称为转换速度。采用不同的转换电路,其转换速度是不同的,并行型比逐次逼近型要快得多。低速的A/D转换器为1~30ms,中速A/D转换器的时间在50μs左右,高速A/D转换器的时间在50ns左右,ADC809的转换时间在100μs左右。 4. 数/模转换器DAC
(1)数/模转换器的基本概念 把数字信号转换为模拟信号称为数-模转换,简称D/A(Digital to Analog)转换,实现D/A转换的电路称为D/A转换器,或写为DAC(Digital –Analog Converter)。 随着计算机技术的迅猛发展,人类从事的许多工作,从工业生产的过程控制、生物工程到企业管理、办公自动化、家用电器等等各行各业,几乎都要借助于数字计算机来完成。但是,计算机是一种数字系统,它只能接收、处理和输出数字信号,而数字系统输出的数字量必须还原成相应的模拟量,才能实现对模拟系统的控制。数-模转换是数字电子技术中非常重要的组成部分。 D/A转换器及A/D转换器的种类很多,这里主要介绍常用的权电阻网络D/A转换器,倒T型电阻网络D/A转换器。 1) 权电阻网络D/A转换器
图7.1 权电阻网络D/A转换器 ①工作原理 权电阻网络D/A转换器的基本原理图如图7.1所示。 这是一个四位权电阻网络D/A转换器。它由权电阻网络电子模拟开关和放大器组成。该电阻网络的电阻值是按四位二进制数的位权大小来取值的,低位最高(23R),高位最低(20R),从低位到高位依次减半。S0、S1、S2和S3为四个电子模拟开关,其状态分别受输入代码D0、D1、D2和D3四个数字信号控制。输入代码Di 为1时开关Si 连到1端,连接到参考电压VREF 上,此时有一支路电流Ii流向放大器的A节点。Di为0时开关Si 连到0端直接接地,节点A处无电流流入。运算放大器为一反馈求和放大器,此处我们将它近似看作是理想运放。 权电阻网络D/A转换器的优点是电路简单,电阻使用量少,转换原理容易掌握;缺点是所用电阻依次相差一半,当需要转换的位数越多,电阻差别就越大,在集成制造工艺上就越难以实现。为了克服这个缺点,通常采用T型或倒T型电阻网络D/A转换器。 ② T形电阻网络D/A转换器 为了克服权电阻网络D/A转换器中电阻阻值相差过大的缺点,又研制出了如图7-3所示的T形电阻网络D/A转换器,由R和2R两种阻值的电阻组成T形电阻网络(或称梯形电阻网络)为集成电路的设计和制作带来了很大方便。网络的输出端接到运算放大器的反相输入端。
图8-3 T形电阻网络D/A转换器 T形电阻网络D/A转换器的优点是它只需R和2R两种阻值的电阻,这对选用高精度电阻和提高转换器的精度都是有利的;该电路的缺点是使用的电阻数量较大。此外在动态过程中T形电阻网络相当于一根传输线,从REFU加到各级电阻上开始到运算放大器的输入稳定地建立起来为止,需要一定的传输时间,因而在位数较多时将影响D/A转换器的工作速度。而且,由于各级电压信号到运算放大器输入端的时间有先有后,还可能在输出端产生相当大的尖峰脉冲。如果各个开关的动作时间再有差异,那时输出端的尖峰脉冲可能会持续更长的时间。 提高转换速度和减小尖峰脉冲的有效方法是将图8-4电路改成倒T形电阻网络D/A转换电路,如图8-6所示