基于机器视觉的精准施药平台喷药机构设计
- 格式:doc
- 大小:207.00 KB
- 文档页数:8

基于无人机的农业精准喷洒技术研究在现代化社会中,信息技术的发展加速了许多行业的变革,其中农业也不例外。
近年来,随着精准农业理念的深入推广,无人机喷洒技术在农业生产中得到了广泛的应用。
本文将重点探讨基于无人机的农业精准喷洒技术的研究进展以及未来成长趋势。
一、现有技术的不足之处目前,以往农业生产方式中使用的固定式、摇摆式的喷洒设备在应对大面积、复杂地形条件下,生产效率低、容易产生重复施药、滞后施药等问题。
而基于无人机的农业精准喷洒技术,则能够满足喷洒需求,实现智能化、高效化、精准化等品质的提升。
这一技术的发展必将推进现代化农业生产的发展。
二、无人机农业喷洒技术的发展历程无人机技术起源于军事应用,在经过科技的迅猛进展下,无人机的应用领域也逐渐扩展到了民用领域,特别是在农业领域,基于无人机的农业喷洒技术的应用也得到了快速的发展。
从最初的量产型固定翼无人机开始,到目前的多旋翼种类繁多,无人机生产厂商已经生产出了各种满足不同任务需求的无人机。
基于此,人们开始进一步探索无人机技术在农业领域中的运用,通过不断的探寻和尝试,目前已经拥有了成熟的基于无人机技术的农业喷洒技术体系。
三、基于无人机的农业喷洒技术的优势首先,无人机在农业喷洒上的优点在于可以方便地应对复杂地形和危险环境,减少了人员的安全风险。
同时基于传感器、高清摄像头等科技设备,无人机还可以实现智能识别和监测作物,提高了产品的品质和产量。
其次,基于无人机的农业喷洒技术还可以根据不同的任务需求,实现仅喷洒在植物部位,并能在植物叶面施药,不浪费任何一滴液体,对于相应植被的成长有很大的帮助。
最后,基于无人机的农业喷洒车辆精准度极高,可实现不同药剂施用量,对于防止疏、群生和不同病害的防治都有不同的喷施需求,能够协助农民在施药的过程中,更加精准和快速地完成对作物的覆盖,令作物及时恢复而且可以得到更好的保护。
四、基于无人机的农业喷洒技术的未来发展趋势随着技术的进步,无人机技术也在不断发展创新中。

基于机器视觉的精准农业机械导航定位系统设计一、研究背景与意义随着科技的不断发展,人工智能、机器视觉等技术在各个领域的应用越来越广泛。
尤其是在农业领域,精准农业作为一种新型的农业生产方式,旨在通过精确的数据采集和分析,提高农业生产效率,降低资源消耗,实现可持续发展。
目前市场上的精准农业机械导航定位系统在实际应用中仍存在一定的局限性,如精度不高、稳定性差、适用范围有限等问题。
研究一种基于机器视觉的精准农业机械导航定位系统具有重要的理论和实践意义。
基于机器视觉的精准农业机械导航定位系统可以提高农业机械的定位精度。
传统的农业机械导航定位系统主要依赖于GPS定位技术,但受到地形、建筑物等因素的影响,其定位精度较低。
而机器视觉技术可以通过摄像头捕捉农田内的图像信息,结合图像处理算法进行目标识别和跟踪,从而实现更准确的定位。
基于机器视觉的精准农业机械导航定位系统可以提高农业机械的作业效率。
通过对农田内作物生长情况的实时监测和分析,农业机械可以根据实际情况进行智能调整,如合理安排作业时间、优化作业路径等,从而提高作业效率,减少资源浪费。
基于机器视觉的精准农业机械导航定位系统可以拓宽农业机械的应用范围。
传统的农业机械导航定位系统主要适用于平坦的农田,对于复杂的地形和环境条件适应性较差。
而机器视觉技术可以在各种复杂环境下实现高精度的定位和导航,为农业机械提供更加广泛的应用空间。
基于机器视觉的精准农业机械导航定位系统具有重要的研究价值和应用前景。
通过对其进行深入研究,有望为我国农业生产带来更高的效率、更好的质量和更可持续的发展。
1.1 精准农业的概念及发展现状精准农业是指通过现代信息技术、传感器技术、遥感技术等手段,对农业生产过程中的土壤、气候、作物生长等多方面信息进行实时监测和分析,从而实现对农业生产的精确管理。
精准农业的发展可以提高农业生产效率,降低资源浪费,减少环境污染,保障粮食安全,提高农民收入,促进农业可持续发展。
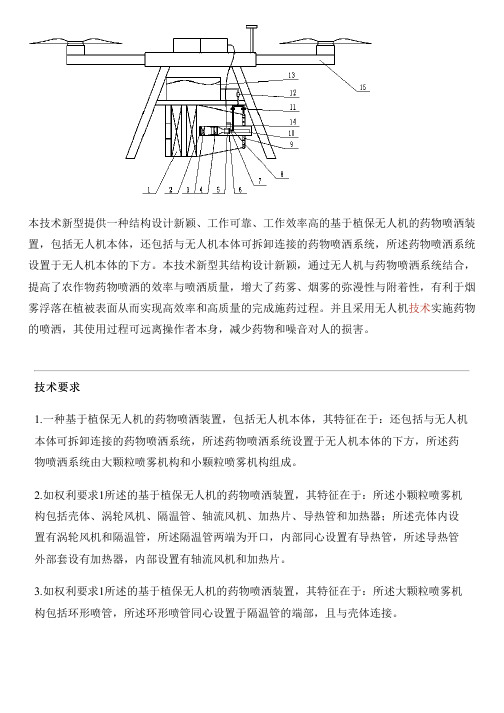
本技术新型提供一种结构设计新颖、工作可靠、工作效率高的基于植保无人机的药物喷洒装置,包括无人机本体,还包括与无人机本体可拆卸连接的药物喷洒系统,所述药物喷洒系统设置于无人机本体的下方。
本技术新型其结构设计新颖,通过无人机与药物喷洒系统结合,提高了农作物药物喷洒的效率与喷洒质量,增大了药雾、烟雾的弥漫性与附着性,有利于烟雾浮落在植被表面从而实现高效率和高质量的完成施药过程。
并且采用无人机技术实施药物的喷洒,其使用过程可远离操作者本身,减少药物和噪音对人的损害。
技术要求1.一种基于植保无人机的药物喷洒装置,包括无人机本体,其特征在于:还包括与无人机本体可拆卸连接的药物喷洒系统,所述药物喷洒系统设置于无人机本体的下方,所述药物喷洒系统由大颗粒喷雾机构和小颗粒喷雾机构组成。
2.如权利要求1所述的基于植保无人机的药物喷洒装置,其特征在于:所述小颗粒喷雾机构包括壳体、涡轮风机、隔温管、轴流风机、加热片、导热管和加热器;所述壳体内设置有涡轮风机和隔温管,所述隔温管两端为开口,内部同心设置有导热管,所述导热管外部套设有加热器,内部设置有轴流风机和加热片。
3.如权利要求1所述的基于植保无人机的药物喷洒装置,其特征在于:所述大颗粒喷雾机构包括环形喷管,所述环形喷管同心设置于隔温管的端部,且与壳体连接。
4.如权利要求2或3所述的基于植保无人机的药物喷洒装置,其特征在于:还包括用于盛装药液的药箱、与该药箱连通的两个药管,两个药管并联连通,且其中一个药管的出口端设置有药液送给喷头,所述药液送给喷头位于导热管的中部,另一个药管的输出端与环形喷管连接。
5.如权利要求2所述的基于植保无人机的药物喷洒装置,其特征在于:在所述导热管上设有一个用于监测温度的温度传感器。
6.如权利要求4所述的基于植保无人机的药物喷洒装置,其特征在于:在两个所述药管上设置有电磁阀,并在药管上还设置有流量计。
技术说明书一种基于植保无人机的药物喷洒装置技术领域本技术新型涉及无人机技术领域,尤其涉及一种基于植保无人机的药物喷洒装置。

农业喷雾机器人机械的设计摘要:农业机器人是21世纪农业机械的发展趋势之一。
为此,讨论了农业机器人的技术特点和基本特征,重点论述了一款可以自主行走且能避障的农业喷雾机器人机械结构创新设计。
其主要包括载体移动系统和车载喷雾系统的创新设计,给出了具体的设计方案和部分结构图以及参数。
该农业喷雾机器人一方面提高了农业喷雾作业的效率,实现作业的自动化;另一方面降低了作业对操作者的健康影响。
关键词:自动控制技术;农业机器人;喷雾机器人;创新设计;机械结构设计引言实施精确农业,广泛应用农业机器人,以提高资源利用率和农业产出率,降低劳动强度,提高经济效益将是现代农业发展的必然趋势。
现代农业的变革向农业机械化提出了新的要求,如机器能够实现自主行走、识别环境、确定目标,甚至要能辨别颜色、气味等。
另一方面,现代科技的发展也为这类机器的开发和应用奠定了科技基础。
例如,用GPS系统可精确地确定机器所在的位置,用GIS 系统可以了解机器周围的地理环境,计算机图像分析技术的发展可使机器能够识别目标,自动控制技术的发展可使机器按人们预期的设想实现各种动作等。
所有这些技术的发展和应用使得现代机器人已具有高度智能化。
如果说机械设计和加工技术及电子技术的发展,使得适用于结构性工业机器人的应用变成了现实的话,而现代微电子技术、计算机技术、机—电—光一体化技术的发展,为非结构性环境的农业机器人的开发和应用打下了坚实的技术基础。
由于农业工作环境的复杂性和多变性,决定了对农业机器人要比对一般工业机器人的要求更高。
农业机械面对的都是复杂多样的农作物及农产品,这就对农业机器人提出了更高的要求,需要具有“感觉”和“判断”功能。
农业机器人的构成和功能决定了它具有如下一些特点:1) 程序性。
只要改变程序软件,就能变更判断基准,变更动作顺序。
如进行果物的收获,可以根据果物生长情况自动变更所收果物的大小、形状等,提高了作业的选择性。
2) 适应性。
根据环境和机械本身的情况,能够自动进行作业量或质的调整。
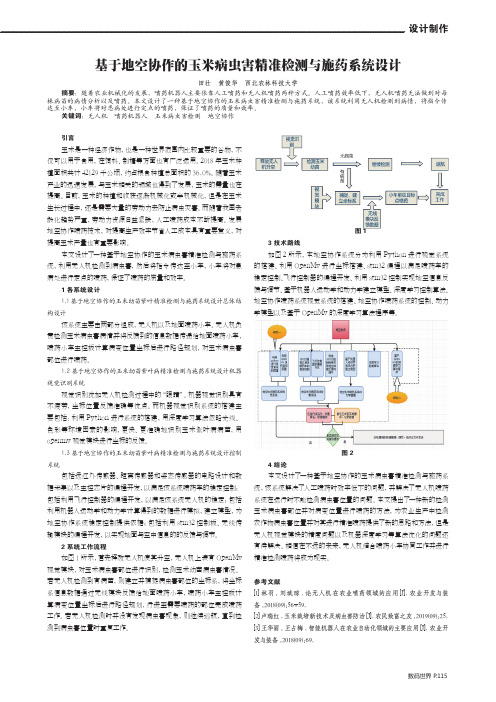
设计制作数码世界 P.115基于地空协作的玉米病虫害精准检测与施药系统设计田壮 黄俊华 西北农林科技大学摘要:随着农业机械化的发展,喷药机器人主要依靠人工喷药和无人机喷药两种方式。人工喷药效率低下,无人机喷药无法做到对每株病苗的病情分析以及喷药。本文设计了一种基于地空协作的玉米病虫害精准检测与施药系统,该系统利用无人机检测到病情,将指令传达至小车,小车将对患病处进行定点的喷药,保证了喷药的质量和效率。关键词:无人机 喷药机器人 玉米病虫害检测 地空协作
引言玉米是一种经济作物,也是一种世界范围内比较重要的谷物,不仅可以用于食用,在饲料、制糖等方面也有广泛运用。2018年玉米种植面积共计42129千公顷,约占粮食种植总面积的36.0%。随着玉米产业的迅速发展,与玉米相关的领域也得到了发展,玉米的需量也在提高。目前,玉米的种植和收获逐渐机械化或半机械化,但是在玉米生长过程中,还是需要大量的劳动力去防止病虫灾害。而随着我国老龄化趋势严重,劳动力资源日益紧缺,人工喷药成本不断提高。发展地空协作喷药技术,对提高生产效率节省人工成本具有重要意义,对提高玉米产量也有重要影响。本文设计了一种基于地空协作的玉米病虫害精准检测与施药系统,利用无人机检测到病虫害,然后将指令传达至小车,小车将对患病处进行定点的喷药,保证了喷药的质量和效率。1 各系统设计1.1基于地空协作的玉米幼苗紫叶精准检测与施药系统设计总体结构设计该系统主要由两部分组成,无人机以及地面喷药小车。无人机负责检测玉米病虫害病情,并将反馈到的信息数据传递给地面喷药小车,喷药小车主控板计算病变位置坐标后进行路径规划,对玉米病虫害部位进行喷药。1.2基于地空协作的玉米幼苗紫叶病精准检测与施药系统设计机器视觉识别系统视觉识别犹如无人机检测过程中的“眼睛”。机器视觉识别具有不疲劳,坐标位置反馈准确等优点。而机器视觉识别系统的搭建主要包括:利用Python进行系统的搭建,用深度学习算法忽略光线、色彩等环境因素的影响,更快、更准确地识别玉米紫叶病病苗,用openmv视觉模块进行坐标的反馈。1.3基于地空协作的玉米幼苗紫叶病精准检测与施药系统设计控制系统包括远红外传感器、距离传感器和姿态传感器的电路设计和数据采集以及主控芯片的编程开发,以满足该系统喷药车的稳定控制;包括利用飞行控制器的编程开发,以满足该系统无人机的稳定;包括利用机器人运动学和动力学计算得到的数据进行模拟,建立模型,为地空协作系统稳定控制提供依据;包括利用stm32控制板、无线传输模块的编程开发,以实现地面与空中信息的的反馈与调节。2 系统工作流程如图1所示,首先释放无人机使其升空,无人机上装有OpenMv视觉模块,对玉米病虫害部位进行识别,检测玉米幼苗病虫害情况。若无人机检测到有病苗,则建立并捕捉病虫害部位的坐标系,将坐标系信息数据通过无线模块反馈给地面喷药小车,喷药小车主控板计算病变位置坐标后进行路径规划,行进至需要喷药的部位完成喷药工作。若无人机检测时并没有发现病虫害现象,则继续巡航,直到检测到病虫害位置时重复工作。 图1
基于单片机的农药喷洒机械自动调平系统设计摘要:在设计农药喷洒机械自动调平控制系统基于单片机STC89C51而言,使安装在机械车上的农药喷洒装置在不平整的农田或山地作业时,始终能水平地喷洒农药。
系统采用倾角传感器进行倾斜检测,再经单片机控制电路,最终由三位四通电磁换向阀控制液压缸完成自动调平。
调平系统能有效提高农药的利用率,减少成本。
关键词:单片机;农药喷洒;自动调平正文:我国是一个农业大国,农业生产是人类生存的根本。
然而,农作物在生长发育过程中,经常遭受到病菌、害虫、杂草等生物的侵害,因此农药喷洒是农业生产工程中必不可少的环节。
随着现代科学技术的进步和高效农业的发展,越来越多的农业机械被应用于农业生产中,以提高农产品生产效率和降低工作强度。
农药喷洒机械的发展,根据各国情况的不同各有其特点:日本地块较小、经营分散,故以发展小型机动式喷洒机械为主;为提高生产效率,近年来开始发展较大型植保机械,如自走式机动喷粉喷雾弥雾机。
美国、加拿大等国,因其土地面积较大且比较平坦,故以发展拖拉机配套的悬挂式和牵引式大型喷洒机械为主,而我国有大量的陡坡林地和山地,一般的农药喷洒机械作业时由于受土地平整度等作业环境的限制,喷洒农药过程中经常会造成很大部分的浪费,导致其使用性能显著降低。
为此,针对现有农药喷洒机械的不足,设计出一套农药喷洒机械自动调平系统,能使机械在不平整的田间或陡坡行驶作业时始终水平喷洒农药,使农药均匀地喷洒在作物上,从而以最少的药量达到最佳的防治效果。
1系统自动调平总体方案设计这个调平系统主要是利用单片机和液压控制喷药杆,这样是为了达到自动调平的目的。
农药喷洒机械进入农田后,自动调平控制系统开始工作,当遇到凹凸农田时,其作业不会因为土地不平整而上下摆动;此时倾斜检测装置将收集到的信号传送到单片机电路,经单片机处理后,输出相应脉冲信号,控制三位四通电磁换向阀和单向比例调速阀并驱动液压油缸完成喷药装置的自动调平;同时,喷药杆在倾斜过程中,角度传感器不断检测反馈当前的倾斜角度,由单片机比较反馈值和给定值之差,形成闭环负反馈调节系统,大大提高了调平系统的精度。
精准农药喷洒平台作者:张峰冯瑞宁刘琪殷秀增杨绍成来源:《农家科技中旬刊》2018年第08期摘要:农业机械化是农业现代化发展的中心环节,针对现在农业生产中对农作物作物施药时存在的人工或半机械作业的问题,设计了精准农药喷洒平台。
本设计由平台主体架、方波控制系统、喷药液压控制系统和药液剩余检测系统四个组成部分。
解决了农药在离开作物时不能突然停止喷洒的问题,更加精准的对作物进行喷撒,大大提高了农药的利用率,降低了对土壤的污染。
关键词:机械平台、精准喷药、农业机械1. 课题研究背景及意义目前,农作物病虫害防治还主要靠喷洒农药,我国的农药生产水平和农药使用量均居世界前列,但农业机械和农药使用技术却严重落后于发达国家。
现在,我国农民对作物的喷药都是采用人工或半机械化作业,这种方式存在很多弊端。
在农业生产中,人工喷洒量不能精确控制,造成农产品中农药残留超标、土壤的污染、空气中的农药被其他有益动物和人类吸入等一系列负面影响。
技术的缺陷直接导致病虫害防治效果低,农药的直接利用率低。
因此改进喷药机械和喷药技术,提升农药的利用率对提高农业生产水平,节约农药使用成本,保护环境等方面具有重大意义。
2. 总体设计方案精准农药喷洒平台的设计包括平台主体架、方波控制系统、喷药液压控制系统和药液剩余检测系统四个部分。
方波控制系统、喷药液压系统和药液剩余检测系统都依附在平台主体架上。
平台主体架的设计是简单的机械结构,内部有预留空间,安装有储药箱,用于装载稀释的药液。
平台主体架上方为了安装方波控制系统、喷药液压控制系统和药液剩余检测系统,有预留的螺孔,安装便捷。
整体效果如图一。
3. 方波控制系统的设计方波控制系统由51单片机和外围电路组成。
利用51单片机设计的电路和程序,实现控制周期长短和占空比大小,需要用到內部定时器。
在设计前要列出作物喷洒药液需要的周期T和占空比D,然后根据这两个数据来定一个时间基准s和溢出次数n,那么高电平持续时间为n*s,此时存在关系n*s=T*D,由此也可知低电平的持续时间。
智能型喷药装置的设计作者:张金波等来源:《农业科技与装备》2015年第01期摘要:为消除传统喷药装置效率低、危害大的弊端,设计了一款智能喷药装置。
介绍喷药装置的结构组成及工作原理,论述喷药过程及控制方法。
该机可以最大程度提高工作效率、作业质量和作业安全性,是未来喷药机械发展的方向。
关键词:喷药装置;智能化;设计;信息采集中图分类号:S491 文献标识码:A 文章编号:1674-1161(2015)01-0028-03目前,我国的果园喷药机械和喷药技术相对落后,不仅作业效率低,而且劳动强度大、作业者所受危害大,农药利用率低且有大量残留。
为消除这些弊端,采用喷药机器人进行病虫害防治是必然趋势。
本文设计了一种智能喷药装置,用来替代现有的传统喷药设备。
1 智能喷药装置整体结构喷药装置主要由机架、分水器、电磁阀、储药罐、吸药泵、电压调节箱、托板、主机、摄像头组成(如图1所示)。
其中,主机固定在托板上,托板与转向机构相连接;可开式外壳通过螺栓固定在托盘上,且其正前端装有摄像头,便于捕捉信息;装置后端带有喷头。
行走装置则由车轮组、减震器、驱动电机等组成。
2 喷药装置的组成及工作原理智能喷药装置包括动力部分、控制部分、信息采集部分、转向部分以及喷药部分等,其组成及工作原理如图2所示。
2.1 喷药装置工作部分组成喷药装置的工作部分即核心部分由输出电压为220 V直流发电机、控制主机、显示器、吸药泵、储药罐、分液器、喷药杆及一字排列的电磁阀等组成,其结构如图3所示。
2.1.1 发电机发电机是装置的动力源,因此发电机的选择尤为重要。
装置选用220 V直流发电机作为动力源,输出电压经电压调节箱稳压后,为其它工作部分提供安全稳定的电压。
2.1.2 控制主机与显示器控制主机相当于人体的大脑,对机械的运行起着至关重要的作用。
其控制指令依靠人工输入,并对传感器采集的信息进行处理。
信息采集部分将采集到的地理数据传输给主机处理器,经主机数据处理模块处理后转换为可识别的信息输出到显示器上。
农药自动喷洒装置作品内容简介这是一种农药自动喷洒装置,通过控制中心对农田场景的模式识别,利用可二维自由移动的药箱,精细控制农药喷洒的范围和用量,对一定范围内的农作物进行农药喷洒作业,可有效减少农药的使用量,且作用效果也大大提高。
该装置在对于农药减排,绿色环保有突出作用,符合绿色农业发展观。
1.研制背景及意义农作物在生长过程中,不可避免的会遭到病虫害的侵袭,喷洒农药是防治病虫害的普遍手段。
目前的喷药方式主要有两种,一种是人工方式,另一种是机具喷药。
人工方式虽然可以做到对农作物全方位进行喷药,但是劳动强度大、效率低。
机具喷药目前可采用飞机喷洒和农药机械喷洒,但使用成本较高,喷洒效果难以保证,而且易造成农药过度排放,故而得不到推广。
本装置是全自动化的,不仅效率高,而且相比其他机械,喷洒效果更好,可减少农药使用量,故可减少农药残留或排放。
2.设计方案2.1结构设计图1 装置结构装置通过搭建在农田两侧的支架结构架空,通过电机传动,实现药箱可以在二维平面内自由移动。
药箱的顶部设置有固定架,固定架的底部贯穿活动孔并固定连接有滑板,滑板顶部的表面与箱体,内腔的顶部滑动接触,固定架内腔的两侧均开设有活动槽,固定架内腔顶部的中心处固定连接有电动伸缩杆,电动伸缩杆的底部固定连接有电机,电机转轴的底部通过联轴器固定连接有传动轴,传动轴的底部贯穿箱体并延伸至箱体内腔的底部,传动轴的两侧均固定连接有搅拌杆,电机表面的中心处套设有固定板,固定板的外圈延伸至活动槽的内腔并固定连接有活动板,活动板的外侧与活动槽的内壁滑动接触,箱体顶部的左侧固定连接有另一电动伸缩杆,其内侧与固定架固定连接。
图2 箱体结构箱体底部表面的四角均通过支架活动连接有滚轮,滚轮的表面设置有耐磨胶层。
底板顶部的左侧固定连接有连接杆,连接杆表面的左侧套设有防滑套。
电动伸缩杆的左侧固定连接有挡板,挡板的底部与箱体固定连接。
进液管的左侧固定连接有快速接头。
2.2控制中心本系统由MCU模块LCD显示模块、传感控制模块、系统供电模块以及步进驱动电路模块组成。
1 摘 要 本课题要求设计一个机构,这个机构主要是基于机器视觉信号上,对作物的有无进行判别,并进行药液的喷洒,药液的喷洒在离开作物时不能突然停止,以至最后的作物喷药不足。所以采用一个PWM脉宽调制电路,控制电磁阀,使喷头喷药时能够适当的延长一点时间,以至所有的作物都能被喷药。基于机器视觉的杂草对准喷药控制系统。本文的主要研究内容如下:
1、施药机构的分析 2、液压元件选用 3、PWM脉宽调制控制系统 4、系统压力损失计算
关键词:喷药控制系统,脉宽调制( PWM ),精准施药 Abstract This task should design a machine which base on the signal of machine vision. It should distinguish is there have corps or no And then spray pesticide. The pesticide should not stop suddenly so as to some crops do not insufflated. So we use PWM to control the electric valve to prolong a little time of spray so the crops will insufflated all fully the spraying control system aiming at weed in row wheat based on machine vision was designed and developed on the basis of research on abroad and domestic .The contents of the study could briefly summarized as follows 1. The analysis of the control machine 2. The selection component liquid press 3. The design of PWM system 4. The wastage of the system
Key words: spray control system, Pulse-width modulation, Precision spray 2
目 录 摘 要............................................................ 1 Abstract............................................................ 2 目录................................................................ 3 1.引言.............................................................. 3 2.液压回路.......................................................... 5 2.1 液压回路的原理............................................... 5 2.2 布局图 ...................................................... 5 3.液压系统.......................................................... 6 3.1 液压元件选用................................................. 6 3.1.1 喷头的选用.............................................. 6 3.1.2 水泵的选用.............................................. 6 3.1.3 溢流阀的选用............................................ 7 3.1.4 单向阀的选用............................................ 8 3.1.5 电磁换向阀的选用........................................ 8 3.1.6 管接头的选用........................... 错误!未定义书签。 3.1.7 水管的选用.............................................. 9 3.2.PWM 脉宽调制控制............................................ 9 3.2.1脉宽调制(PWM)............................................ 9 3.2.2 PWM电路............................................... 10 3.2.3 流量控制原理 .......................................... 10 3.3系统中的压力损失 ............................................ 11 3.3.1管路沿程损失 ........................................... 11 3.3.2元件的局部损失 ......................................... 11 4 .总结............................................................. 6 参 考 文 献......................................................... 6 致 谢............................................................ 8 3
1. 引言 长期以来,人们赖以生存的食物靠栽种植物和饲养动物等方法来提供,然而在栽种植物过程中,不可避免地要遇到防治病虫害的问题。对农田作物病虫害防治一般来说有三种方法,一是利用自然天敌,自然界很多作物害虫都有其天敌,合理地利用它的自然天敌可以有效地防止作物病虫害的发生和蔓延,而且也减少了农药的使用;二是人工清除,用手或借助一些简单机械设备来防治;三是用化学防治的方法,通过喷洒农药来消灭害虫和细菌等。随着时代的发展,人工防治的方法已逐渐被淘汰,化学防治成为目前控制病虫危害的主要手段。〔11,而防治效果的好坏,喷施技术十分重要。目前,国内农民对作物喷药都是采取人工喷洒或半机械化作业,一方面对人身伤害很大,遇到恶劣天气人在作业时甚至容易中毒。另一方面喷药时也不是精确对准农作物,往往也喷在土壤上,不仅浪费了农药,增加了作物的农药残留量,而且喷在土壤中的农药易造成土壤酸化和地下水污染。随着农药的大量使用,其残留在农作物和土壤中的农药对人身和环境的危害也与日俱增,这跟现代农业要求精准高效、绿色环保的要求是背道而驰的。因此,有必要研制一种基于机器视觉的高效可行的喷药装置,让机器代替人在田间作业的同时能比较精准地对准农作物喷药,以降低人的劳动强度,提高药效和保护农田环境。同时国家 十一五 规划中己将研究高效低污染的喷药技术和植保装备技术作为重大攻关项目,而且国家中长期科学和技术发展纲要也已把农业精准作业和信息化列为重大课题。在精准农业的不断发展壮大和农业生产从机械化、自动化逐步向智能化方向发展的趋势下,智能化农业机械必将成为未来农业生产的主要装备 。〔21。本课题就是基于这一背景下着手准备的,研究基于机器视觉的作物对行喷药控制系统不仅对农田作物喷药自动化具有十分重要的意义,而且也是精准农业技术体系的重要组成部分和实现精准农业中变量技术中的重要环节。 4
2. 液压回路 2.1 液压回路的原理 系统要求完成的设计是基于机器视觉基础上。因此,确定用到PWM脉宽调制控制,由信号发生器,通过PWM来使方波信号的占空比发生改变,使的在有作物的情况下可以延长喷洒,而不会出现有的作物漏喷的情况。 如图1,为液压回路
图1 液压回路 原理:药液通过水泵抽出,当信号发生器发出的方波为低电平时,电磁阀没有接通,药液通过溢流阀溢流回药液箱;当信号发生器的方波为高电平时,PWM脉宽调制工作,使得电磁阀通电,电磁阀打开,药液通过电磁阀流到喷嘴,喷出药液。 要求:微型水泵的最大输出压力应当与喷头的最大工作压力相适应。且溢流阀和电磁换向阀的最低工作压力应该大于微型水泵的最大工作压力。才能保证溢流阀和电磁换向阀工作时不会应工作压力过大而损坏。
2.2 布局图
初定布局图如下图2:
图2 布局图 5
3. 液压系统 3.1 液压元件选用 3.1.1喷头的选用 液压系统采用市场上普遍采用的N60系列钢玉瓷喷头,如图3
图3 n60喷头 规格参数: 孔径规格mm 0.60 外牙 T No. 10/32unc 操作压力Mpa 0.20~0.45 管路中总的压力损失
321jjjfj
hhhhh
=0.00091m+510352.4 m+510656.4 m+510637.3 m =0.00104m
1.04mm (水柱) 由此可以得出,液压沿程损失是很小的,所以微型水泵以及整个液压回路是可以正常工作。