堆垛机系统的方案设计
- 格式:docx
- 大小:37.25 KB
- 文档页数:3

堆垛机后续维护方案1. 引言堆垛机是一种用于自动化货物存储和取放的设备,广泛应用于仓储物流行业。
在堆垛机投入使用后,需要进行后续的维护工作,以确保设备的稳定运行和延长设备使用寿命。
本文将介绍堆垛机后续维护方案,包括维护策略、维护流程和维护事项等内容。
2. 维护策略2.1 定期检查定期检查是堆垛机后续维护的重要策略之一。
可以按照以下频率进行定期检查:•每日检查:每天对堆垛机的运行情况进行检查,包括设备运行状态、传感器是否正常、安全装置是否有效等。
•每周检查:每周对堆垛机的各个部件进行检查,包括传动系统、控制系统、电气系统等。
•每月检查:每月对堆垛机的关键部件进行检查,包括齿轮、链条、轴承等,以及对设备进行润滑和清洁。
2.2 预防性维护除了定期检查外,还需要进行预防性维护。
预防性维护是指在设备运行正常的情况下,提前进行一些维修和更换工作,以防止设备故障和损坏。
可以采取以下预防性维护措施:•定期更换易损件:根据设备的使用情况和厂家提供的建议,定期更换易损件,如轮胎、皮带等。
•清洁和润滑:定期清洁设备的外观和内部,并对需要润滑的部件进行加油或润滑脂的注入。
2.3 故障维修除了定期检查和预防性维护外,还需要及时处理设备故障并进行维修。
堆垛机的故障可能涉及到机械部件、电气系统、控制系统等多个方面。
在故障维修时,可以采取以下步骤:•故障分析:首先需要对故障进行分析,确定故障原因和范围,以便有针对性地进行维修。
•维修方案:根据故障分析的结果,制定维修方案,明确所需工具和备件,并安排专业技术人员进行维修。
•维修记录:在维修完成后,记录维修的过程和结果,以便后续追踪和分析。
3. 维护流程3.1 定期检查流程定期检查流程包括以下步骤:1.检查设备运行状态,确认是否正常运行。
2.检查传感器和安全装置是否正常工作。
3.检查设备的传动系统、控制系统和电气系统等部件是否正常。
4.对设备进行润滑和清洁。
3.2 预防性维护流程预防性维护流程包括以下步骤:1.根据设备使用情况和厂家建议,制定维护计划,明确维护的内容和时间。

一、立体库的定义立体化仓库又称高层货架仓库、自动存取系统AS/RS(AutomaticStorage&RetrievalSystem),采用几层或十几层的高层货架存放货物,以巷道堆垛机为主,并结合出入库辅助设备来进行作业的一种仓库。
能够按照系统指令自动完成货物的存取,并能对库存货物进行自动管理,完全实现自动化出入库作业。
二、立体库系统的组成自动化立体仓库系统主要是由立体货架、出入库托盘输送设备、存储设备、巷道堆垛机、尺寸检测条码阅读系统、控制系统、通讯系统和上位机监控系统等部分组成。
自动化立体仓库系统与土建公共设施有关,如厂房、照明系统、消防系统、通风采暖系统、动力系统等等有关。
优点:提高库存占地面积,提高空间利用率;节省人力,降低人工作业强度及时了解库存信息,便于盘库;能够及时准确的寻取货物进行出入库。
功能:信息查询;自动存储;自动入库、自动出库、发货。
三、存储设备储存载体:用于装载物品的工具。
例如托盘、容器(料箱)、单品、其他专用工具等等;储存设备的选择依据储存物品形状、重量、体积、包装形式等特性决定。
货架类型:货架用于存放成件或整托盘物品的保管设备。
货架类型包括:普通货架、贯通式货架、后推式货架、移动式货架、旋转式货架、阁楼式货架、专用货架、自动化立体仓库货架。
普通货架:适用于储存箱、包或单品等重量轻、体积小的物品。
货架高度一般在4m以下。
钩式设计,可自由调整存取高度及间隔,一般采用人力(不用叉车等)直接将货物(不采用托盘单元)存取于货架内。
贯通式货架:又叫驶入式/驶出式货架,用于储存托盘装载单元并具有叉车升降车出入口。
储存密度高,存取性差,同一通道内的货物品种必须相同或同一通道内的货物必须一次完成出入库作业。
后推式货架:存取货依靠倾斜滑轨,货物自动滑送前方或被推送至后方。
存取密度高,一般深度方向达到3~5个储位。
适用于少品种大批量物品的存储,无法实现先进先出的存取方式。
旋转式货架:旋转式货架分为水平旋转式和垂直旋转式两种,操作简单,存取作业迅速,适用于小批量、多品种、小物品的储存及管理,出入库能力低。

双深位堆垛机逻辑"双深位堆垛机" 是一种自动化仓储设备,通常用于高密度存储和检索货物。
这种堆垛机可以在垂直方向上高效地堆叠和检索货物,并具有双深位的设计,意味着它可以存储两个货物深度。
以下是双深位堆垛机的一般逻辑:1.货物存储:•当有货物需要存储时,双深位堆垛机会根据存储任务的指令,将货物从输送线或其他入口接收到堆垛机的工作区域。
2.仓库管理系统(WMS)控制:•双深位堆垛机通常受到仓库管理系统(WMS)的控制。
WMS根据库存需求和货物信息生成任务,然后将任务发送给堆垛机。
3.扫描和定位:•在接收到存储任务后,堆垛机使用激光、摄像头或其他传感器进行扫描,以准确定位货物的位置和高度。
4.双深位存储:•堆垛机根据扫描结果,将货物双深度地存储到储位中。
这意味着在同一排上,堆垛机可以存储两个货物,一个在前面,一个在后面。
5.检索任务:•当有货物需要检索时,WMS生成相应的检索任务,并将任务发送给堆垛机。
6.双深位检索:•堆垛机执行检索任务,按照指令定位到目标货物,然后将其双深度地检索出来。
这意味着可能需要先移动前面的货物,以便访问后面的货物。
7.货物传送:•通过输送线或其他出口,检索到的货物被传送到指定的区域,以供进一步处理、包装或发运。
8.自动化控制:•双深位堆垛机的运作通常是全自动化的,由计算机控制系统实现。
这包括堆垛机的导航、定位、起升和移动等功能。
总体而言,双深位堆垛机的逻辑是根据存储和检索任务的需求,通过WMS控制,使用精密的传感器和自动控制系统,实现高效、准确的货物存储和检索。

堆垛机的结构组成和工作原理大家好啊,今天我们来聊聊一个在仓库、物流中可谓“明星”的小家伙——堆垛机。
它可不是某个令人咋舌的高科技产品,而是每个仓库里总能见到的那位“搬运能手”。
有没有发现,仓库里那些高高堆起的货物,像是一座座小山,恰好就是堆垛机出场的时候了。
我们今天就好好唠唠这位小能手的“家底”和“本事”。
1. 堆垛机的结构组成说到堆垛机,咱们得先眼熟一下它的“家底”。
就像人有头、身子、手脚,堆垛机也有它的基本组成部分,首先来说说它的“脑袋”——控制系统。
这系统呢,简单来说就是个“聪明的小家伙”,它负责指挥整个堆垛机的运作,就像一个调皮的小孩儿,想去哪儿就去哪儿,想做啥就做啥。
这控制系统通常包含了各种传感器和智能算法,确保堆垛机能根据实时的数据做出反应,真是个聪明绝顶的玩意儿。
接下来是“身子”,也就是框架和支撑结构。
框架就像扎实的身体,让堆垛机能够承受沉重的货物。
这结构一般用高强度的材质制成,耐磨耐用,不怕风吹雨打,真是结实得让人放心。
还有一些滑轮和转动部分,这可是堆垛机灵活“动”的关键。
想象一下,它在狭窄的仓库里转来转去的样子,活脱脱一只风灵活影的小狐狸。
再说说“手脚”,也就是起升机构和搬运装置。
起升机构的任务就是把那些重重的货物“一举高升”,而搬运装置则像劈叉的小腿,能让堆垛机将货物“移动”到你想要放的地方。
整合起来,这个小东西就像一台现代化的“超人”,既能攀高,又能搬重,牛得没话说!2. 堆垛机的工作原理接下来就是堆垛机的“本事”,它是怎么工作的呢?想像一下,你在操作堆垛机,首先,你的“聪明脑袋”会接收到指令,比如“把那箱子放上去!”然后,控制系统就像消费快递的小哥,立马开始计算如何最有效率地完成这个任务。
堆垛机一开始会慢慢接近货物,然后就开始动起来,就像你的脚步轻快地走向目标。
它的轮子转呀转,简直就像在“踩摩托”!当它靠近的时候,起升机构就会悄悄抬升,真是“节节高升”的节奏。
此时,货物被装置“小手”牢牢夹住,准备移送到指定位置。
基于PLC的自动化仓储系统的设计与优化摘要:自动化仓储系统是现代物流与仓储管理的核心,其效率与智能化水平直接影响整体运营效能。
基于PLC的设计优化,本文提出了一种高效、可靠的自动化仓储系统方案。
首先,文章详细介绍了系统的架构设计,强调了模块化、数据流处理和用户界面的重要性。
随后,论述了PLC编程在实现物料搬运、分类、存储和检索等核心功能中的关键作用。
进一步,文中探讨了利用PLC进行效率优化和流程自动化的策略,并分析了系统集成与智能化的实现方法,如与传感器、RFID技术和机器视觉系统的集成。
这些优化措施显著提升了仓储系统的性能和智能化水平。
关键词:PLC;自动化仓储系统;设计与优化1引言随着工业自动化和信息技术的飞速发展,自动化仓储系统成为提高物流效率、降低运营成本的关键。
在此背景下,PLC作为控制工程的核心,其在自动化仓储系统中的应用日益重要。
PLC的灵活性、稳定性和易编程性使其成为实现仓储自动化的理想选择。
本文围绕PLC在自动化仓储系统中的设计与优化,深入探讨了PLC的应用方式、优化策略以及智能化集成,旨在为提升仓储系统的自动化和智能化水平提供理论指导和实践参考。
2自动化仓储系统的PLC设计2.1系统架构与设计原则在自动化仓储系统的PLC设计中,系统架构与设计原则的确立是至关重要的一环。
这一部分的核心在于构建一个既灵活又高效的框架,确保系统能够顺畅运行,同时具备良好的可扩展性和维护性。
系统的架构设计强调模块化的思路,意在将整个自动化仓储系统划分为多个独立但协同工作的模块。
这种分割不仅有助于简化系统的复杂性,还便于后期的维护和升级。
每个模块都被设计成具备独立的功能,如物料识别、搬运、存储和检索等,同时通过中央控制单元进行统一的协调和管理。
在数据流处理方面,系统利用先进的数据管理技术确保信息的即时传输和准确处理,这对于提升仓储效率和减少错误至关重要。
数据流的设计遵循高效和安全的原则,通过优化算法确保数据在系统各部分之间高效流动,同时保证数据安全和隐私。
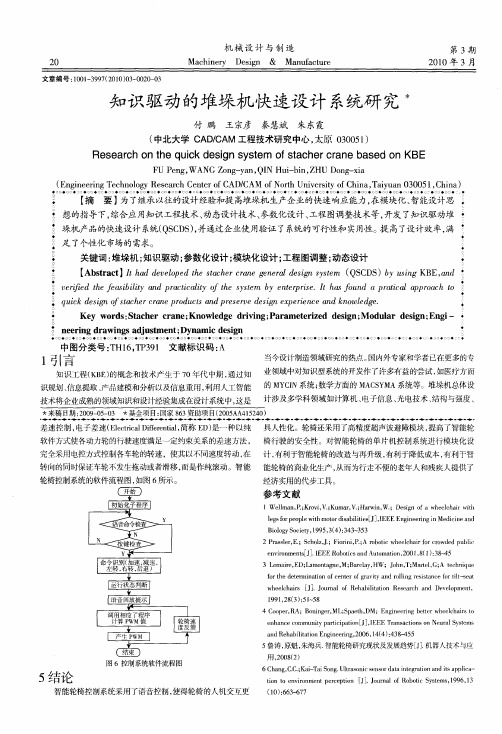
堆垛机及AGV能⼒计算堆垛机能⼒计算(2/3)L L(1/5)L (1/5)(2/3)堆垛机复合作业⽰意图堆垛机⼯作效率核算表⼯作任务:A ⼊库堆垛机⼊库——穿梭板放货——穿梭板返回堆垛机——堆垛机回到原点B 穿梭板取货——堆垛机⾃原点到穿梭板接货位置——穿梭板上堆垛机——堆垛机到原点放货各任务所需时间计算结果得出⼊库效率为61.9次每⼩时,出库效率为61.9次每⼩时74.8次每⼩时。
AGV搬运能⼒计算AGV平均运⾏速度为35m/min,站点分布⽰意图如下所⽰,单次往返最⼤运⾏距离约80m(电梯上下距离不计)。
车间配送站点分布及间距⽰意图能⼒计算(1)AGV⼩车的⼯作任务:⽴体库出库⼝(40s)——电梯间(40s)——车间⼯位1送货(40s)——车间⼯位2收空盘(40s)——电梯间(40s)——待命区卸空盘(60s)——⽴体库⼊库⼝(40s);(2)单台AGV⼩车能⼒计算如下表:平均运⾏速度(m/min)平均⾏驶距离(m)平均⾏驶时间(min)平均作业时间(min)每1h配送次数(次)35 60 1.71 6.71 9.4(9)上述单台AGV综合配送能⼒为每⼩时9托,每6.71min完成⼀次配送,单台配送效率略低于6min每托。
AGV主要功能及指标参数AGV系统性能参数表序号性能参数名称性能参数值备注1 车体尺⼨1400×800×800mm (搬送⾯680mm)AGV双系统实施⽅式AGV主要完成物料由仓储库⾄车间指定的配送点的配送⼯作,通过磁条导引⽅式,⾃动在配送点和⽴体库之间对托盘物料进⾏搬运、流转,期间完成空托盘的回收。
在每个站点安装⼀个两键⽆线呼叫器,需要物料时按下⽆线呼叫器对应的呼叫按钮,呼叫AGV运输物料,有空托盘需要返回时按下空托盘返回按钮。
物料配送流程⽰意图有线通信⽅式:采⽤磁条或⼆维码导航,车辆采⽤激光探测避障,车辆通信采取有线通信⽅式,站点上通信,每个站点需要安装光电对接模块,当AGV到达停靠点时,AGV 上和停靠点位置的光电对接模块会相互通讯,离开⼝通信中断,AGV只在停靠点上接受任务和上传数据,不能获取AGV的实时位置信息。
主要作业流程及分解单次启动程序OB100中完成数据整理和清空的操作。
将使用过的数据空间清空,包括清除DB30的整个空间和各个标志位(面板显示的就可以省略)。
主程序OB1中进行主要的程序调用,只处理程序的归类,分为手动、自动、联网、通讯、面板显示几个部分。
其中此通讯为无条件调用(UC),只处理报告目前所处状态即目前所处列数、层数,手动等状态。
面板显示用无条件调用(UC),技巧是显示用“=”来确定标志,这样就为自复位,避免以后的标志位的清空。
机器的运行,起升,是无条件调用的,包括位置的检测,限速开关的检测。
但需要是在“去取货”或者是“去卸货”标志的前提下手动状态下确定前进、后退、上升、下降、高速、低速、左伸、右伸、(有组合项目)其中限制货物超限的情况下只能慢速的起升和下降,不能运行,伸叉没有限制。
手动状态下的自动对准停止功能可以作为升级加入,但是如何在大型的库中利用手柄实现要商量。
检测片的检测功能可以分开,如上升是一个计数器,低位的时候记数,下降的时候用另外的一个计数器,高位的时候计数,两个计数器的合应该比总的层数多一,如果不是的话则为计数错误。
(运行的情况同)自动状态下进行数据的输入,需要对ASKII码到字符的一个转换的过程,操作屏上只是数据的一个采集功能,真正的运算由PLC程序进行操作,这样方便数据的整理和运算的稳定性。
数据转换前要有个判断,判断是否为9以上的,如果是的话就要加到a,尽量不用怪异字符来表示。
操作数据形式是从DB1~~~~10进行输入,将数据从这些DB块转到DB30中,在转换过程中进行格式的转换。
通讯的电报占用DB31、DB32两个块,在接到这些指令后也是转到DB30中进行操作,也就是说堆垛机在进行指令执行的时候只是负责DB30中的数据,注意执行完毕后要把空间清除掉。
自动状态下如果用激光测量,那就要先无条件调用激光数据的转换功能。
自动和联网状态下要有个无条件调用的通讯,此通讯要做的是报告故障情况和接收发送通讯电报,并把这些电报的数据转化成标志位为下一步动作运行做准备。
堆垛机系统的方案设计
在堆垛机系统的方案设计中,有许多重要的因素需要考虑。
堆垛机
系统是一种自动化的货物存储和取货系统,广泛应用于仓储和物流行业。
本文将从系统性能、技术选型、结构设计和安全性等方面,探讨
堆垛机系统的方案设计。
一、系统性能设计
堆垛机系统的性能设计是确保系统正常运行的基础。
性能设计应包
括以下几个方面:
1.1 提升速度和载重能力
堆垛机系统的提升速度和载重能力对于提高货物存取效率至关重要。
设计时需充分考虑货物种类、尺寸和重量,确定堆垛机的最大提升速
度和最大载重能力,以满足实际工作需求。
1.2 定位精度和稳定性
堆垛机系统的定位精度和稳定性直接影响到货物的存取准确性和安
全性。
设计时应结合自动控制系统,采用精准的定位传感器和稳定的
运动控制算法,确保堆垛机的定位准确、稳定、可靠。
二、技术选型设计
堆垛机系统的技术选型设计是选择合适的设备和技术方案,以满足
系统需求。
技术选型设计应包括以下几个方面:
2.1 传动方式和控制系统
根据实际情况选择合适的传动方式,如液压传动、电动传动或混合传动等;同时,选择合适的控制系统,如PLC控制系统或计算机控制系统等,以实现自动化控制和监控。
2.2 使用的传感器和执行机构
根据系统的具体工作要求和环境条件,选择合适的传感器和执行机构,如位置传感器、力传感器、激光传感器等,以及液压缸、电动机等,以实现系统的自动化操作和控制。
三、结构设计
堆垛机系统的结构设计是确保系统稳定性和运行效率的重要因素。
结构设计应包括以下几个方面:
3.1 跨距和高度
根据仓库或物流中心的实际情况和存储需求,确定堆垛机系统的跨距和高度。
跨距和高度的设计需要考虑仓库的空间布局、货物存储密度和系统的提升能力。
3.2 支撑结构和导向装置
设计合理的支撑结构和导向装置,以确保堆垛机运行的稳定性和安全性。
支撑结构应能够承受系统的重量和提升力,并具有足够的刚度和稳定性。
四、安全性设计
堆垛机系统的安全性设计是保障人员和货物安全的关键。
安全性设计应包括以下几个方面:
4.1 安全传感器和警报系统
设计合理的安全传感器和警报系统,可以实时检测系统的工作状态和环境变化,并及时发出警报信号,以保障人员和货物的安全。
4.2 紧急停车和故障处理
设计应考虑堆垛机系统出现紧急情况时的停车和故障处理机制,以避免人员伤害和货物损失。
紧急停车装置和故障处理程序应遵循相关的安全标准和规范。
综上所述,堆垛机系统的方案设计需要综合考虑系统性能、技术选型、结构设计和安全性等因素。
通过合理的设计,可以实现堆垛机系统的高效运行和安全操作,提高仓储和物流效率。