Android编程之加速度传感器
- 格式:ppt
- 大小:831.00 KB
- 文档页数:11
利用传感器实现微信的摇一摇功能现在的不少应用都用到了摇动手机改变内容的功能,比如微信中的“摇一摇”功能。
前两天要实现这个功能,稍微看了一下关于传感器Sensor的内容。
传感器有几种类型:方向传感器: Sensor.TYPE_ORIENTATION加速度(重力)传感器: Sensor.TYPE_ACCELEROMETER光线传感器: Sensor.TYPE_LIGHT磁场传感器: Sensor.TYPE_MAGNETIC_FIELD距离(临近性)传感器: Sensor.TYPE_PROXIMITY温度传感器: Sensor.TYPE_TEMPERATURE在摇动手机的功能中,我们只用加速度传感器就行了~~加速度传感器返回值的单位是加速度的单位 m/s^2(米每二次方秒),有三个方向的值分别是values[0]: x-axis 方向加速度values[1]: y-axis 方向加速度values[2]: z-axis 方向加速度其中x,y,z方向的定义是以水平放置在的手机的右下脚为参照系坐标原点x 方向就是手机的水平方向,右为正y 方向就是手机的水平垂直方向,前为正y 方向就是手机的空间垂直方向,天空的方向为正,地球的方向为负所以说,你的手机放置的空间位置不同,它三个方向的加速度也不同。
在这里,三个方向的加速度,与我们传统意义上的加速度(9.8m/s2)有所区别,需细细品味。
以下是摇动手机后清除TextView的文字的代码:package gy.lovers;import java.util.ArrayList;import java.util.List;import java.util.Random;import android.app.Activity;import android.app.Service;import android.content.res.Resources;import android.hardware.Sensor;import android.hardware.SensorEvent;import android.hardware.SensorEventListener;import android.hardware.SensorManager;import android.os.Bundle;import android.os.Vibrator;import android.view.View;import android.widget.Button;//需要实现SensorEventListener接口public class LoversChoise extends Activity implements SensorEventListener{Button clear;//定义sensor管理器private SensorManager mSensorManager;//震动private Vibrator vibrator;public void onCreate(Bundle savedInstanceState) {super.onCreate(savedInstanceSt ate);setContentView(yout.lovers choise);//获取传感器管理服务mSensorManager = (SensorManager) getSystemService(SENSOR_SERVICE);//震动vibrator = (Vibrator) getSystemService(Service.VIBRATOR_SERVICE);clear = (Button)findViewById(R.id.clear);clear.setListener(new Button.Listener(){@Overridepublic void (View arg0) {// TODO Auto-generated method stub//点击button后,给button按钮设置了textclear.setText("现在给button的text赋值喽~");});@Overrideprotected void onResume(){super.onResume();//加速度传感器mSensorManager.registerListener(this,mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),//还有SENSOR_DELAY_UI、SENSOR_DELAY_FASTEST、SENSOR_DELAY_GAME等,//根据不同应用,需要的反应速率不同,具体根据实际情况设定SensorManager.SENSOR_DELAY_NORMAL);}@Overrideprotected void onStop(){mSensorManager.unregisterListener(this);super.onStop();}@Overrideprotected void onPause(){mSensorManager.unregisterListener(this);super.onPause();}@Overridepublic void onAccuracyChanged(Sensor sensor, int accuracy) { // TODO Auto-generated method stub//当传感器精度改变时回调该方法,Do nothing.}@Overridepublic void onSensorChanged(SensorEvent event) {// TODO Auto-generated method stubint sensorType = event.sensor.getType();//values[0]:X轴,values[1]:Y轴,values[2]:Z轴float[] values = event.values;if(sensorType == Sensor.TYPE_ACCELEROMETER){/*因为一般正常情况下,任意轴数值最大就在9.8~10之间,只有在你突然摇动手机*的时候,瞬时加速度才会突然增大或减少。

Android 传感器介绍一、Android 手机坐标系及角速度传感器TYPE_ACCELEROMETER 介绍在Android 坐标系统中,坐标原点位于屏幕的左下角,X 轴水平指向右侧,Y 轴垂直指向顶部,Z 轴指向屏幕前方。
在该系统中,屏幕后方的坐标具有负的Z 轴值。
Android 加速度计数据定义为:Sensor.TYPE_ACCELEROMETER图 1. 3 轴加速度计的Android 坐标系统所有数值都采用SI 标准单位(2/s m ),测量手机的加速度值,并减去重力加速度分量。
values[0]:x 轴上的加速度值减去Gx values[1]:y 轴上的加速度值减去Gy values[2]:z 轴上的加速度值减去Gz例如,当设备平放在桌上并推着其左侧向右移动时,x 轴加速度值为正。
当设备平放在桌上时,加速度值为+9.81,这是用设备的加速度值 (0 2/s m ) 减去重力加速度值 (-9.812/s mm/s2)得到的。
当设备平放在桌上放,并以加速度A m/s2 朝天空的方向推动时,加速度值等于A+9.81,这是用设备加速度值(+A 2/s m )减去重力加速度值(-9.81 2/s m )得到的。
表 1 列出了与设备的各个位置相对应的传感器的加速度值读数。
用户可以用下表检查加速度计的方向与系统坐标是否一致。
表 1. 不同位置上各轴的加速度值通过加速度传感器读取3 轴加速度值时,需要假设传感器的3 轴方向与系统坐标是一致的。
但是在实际的产品中,可能会使用不同的传感器芯片,或者采用不同的安装方向,因此数据方向也会不同。
图2 所示的是飞思卡尔MMA8452Q 3 轴加速度传感器的方向定义。
图2. MMA8452Q 的方向定义在图2 中,我们可以看到当安装芯片时,必须让引脚1 处于右下角的位置(PD),并安装在PCB 的前方,这样才能与Android 坐标系统的默认位置相符。
这样安装后,用户可确定数据方向与系统坐标定义是一致的。
专业工程综合实训设计报告目录第一章绪论 (1)1。
1课题的背景及意义 (1)1.2系统框架 (1)第二章系统分析 (3)2.1 系统可行性分析 (3)2.1.1 功能可行性分析 (3)2。
1.2 运行环境可行性分析 (3)2。
2 开发环境简介 (3)2。
2。
1 Java Development kit(JDK)介绍 (3)2.2.2 Android SDK 介绍 (3)2.2.3 Eclipse开发工具介绍 (4)2.2.4 Android Development Tools(ADT)介绍 (4)第三章 Android开发常用到的技术及环境搭建 (5)3.1 Android开发常用到的技术 (5)3。
1.1 Activity (5)3.1.2 Service (6)3。
1。
3 Content Provider 内容提供者 (7)3。
1。
4 Intent 信使 (7)3。
2环境搭建 (7)3.2.1安装JDK (7)3.2.2安装Eclipse (8)3。
2.3 Android SDK安装 (8)3.2。
4 ADT安装 (8)第四章手机计步器的设计与实现 (9)4.1计步器功能的设计 (9)4。
2计步器功能的实现 (11)4.2。
1 计步开始及暂停 (11)4。
2.2 复位键 (12)4.2。
3设置步长 (12)4.2。
4设置体重 (12)4.2。
5历史记录的查看及删除 (13)第五章计步器的界面效果 (19)5.1用户界面 (19)5.2设置界面 (20)5.3历史界面 (23)5.4日历选择界面 (24)5。
5用户离开界面 (25)第六章系统测试与分析 (26)6。
1 测试过程 (26)6。
2 测试分析 (39)结论 (40)参考文献 (41)第一章绪论1。
1课题的背景及意义当今社会,手机已经成为人们工作生活中必不可少的一项通讯和娱乐工具,随着手机的不断更新,手机的各种高层服务和应用层出不穷。
android计步器课程设计一、课程目标知识目标:1. 学生能理解Android计步器的基本工作原理,掌握计步器开发的必备知识。
2. 学生能掌握在Android平台上使用传感器获取数据的方法,了解计步算法的基本概念。
3. 学生了解Android开发中的界面设计与实现,能运用所学知识完成计步器界面设计。
技能目标:1. 学生能运用Android Studio编写计步器程序,实现计步功能,具备实际操作能力。
2. 学生能通过查阅资料、分析问题,解决计步器开发过程中遇到的技术难题,具备问题解决能力。
3. 学生能进行团队协作,共同完成项目开发,具备良好的沟通与协作能力。
情感态度价值观目标:1. 学生通过学习计步器开发,培养对编程的兴趣,激发学习动力。
2. 学生在项目实践过程中,树立正确的价值观,认识到科技对生活的积极作用。
3. 学生在团队协作中,学会尊重他人,培养合作精神,提高自身综合素质。
课程性质:本课程为实践性较强的课程,结合Android开发技术,以项目为导向,让学生在实际操作中掌握知识。
学生特点:学生具备一定的编程基础,对Android开发有一定了解,对实际项目开发充满兴趣。
教学要求:教师需结合学生特点,采用项目驱动法,引导学生自主探究、动手实践,注重培养学生的实际操作能力和团队协作精神。
在教学过程中,关注学生的学习反馈,及时调整教学策略,确保课程目标的达成。
二、教学内容1. Android开发基础回顾:介绍Android平台的基本架构,回顾Activity、Service、BroadcastReceiver等核心组件的使用,为学生后续学习计步器开发奠定基础。
(对应教材第一章)2. 传感器与计步算法:讲解Android平台传感器系统,重点介绍加速度传感器的工作原理及数据获取方法。
分析常见计步算法,如步数检测、步频计算等。
(对应教材第二章)3. 界面设计与实现:教授Android界面设计的基本知识,如布局、控件使用等,指导学生完成计步器界面的设计与实现。
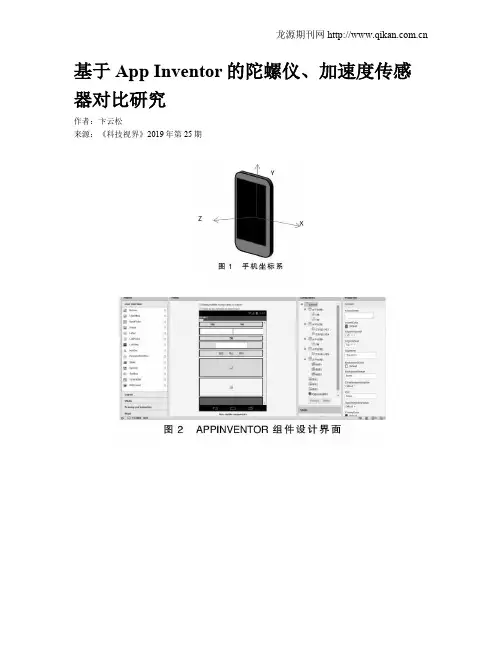
基于App Inventor的陀螺仪、加速度传感器对比研究作者:卞云松来源:《科技视界》2019年第25期【摘要】基于手机传感器的行为识别与手势识别研究具有重要理论意义与实用价值,怎样方便初学者对手机里的传感器进行学习,本文介绍了一种方法。
通过用APP Inventor编程,对智能手机里的陀螺仪、加速度传感器进行对比研究。
【关键词】App Inventor;手机;陀螺仪;加速度传感器中图分类号: TN929.53 文献标识码: A 文章编号: 2095-2457(2019)25-0041-003DOI:10.19694/ki.issn2095-2457.2019.25.019Contrastive Study of Gyroscope and Acceleration Sensor Based on App InventorBIAN Yun-song(Jianghai polytechnic, Yangzhou Jiangsu 225000, China)【Abstract】The research of behavior recognition and gesture recognition based on mobile phone sensor has important theoretical significance and practical value.How to facilitate beginners to learn sensors in mobile phone is introduced in this paper.By programming with APP Inventor,the gyroscopes and accelerometers in smart phones are compared and studied.【Key words】App Inventor;Mobile Phone;Gyroscope;Acceleration Sensor0 概述陀螺仪、加速度传感器现在应用越来越广,智能手机上也有这两种传感器,如果在手机上通过编程APP程序来进行研究,对于非计算机专业的人士难度较大。
加速度传感器原理结构使用说明校准和参数解释
1.安装:将传感器固定在需要测量加速度的物体上,确保传感器与物
体的接触牢固。
2.接线:根据传感器的规格书和制造商提供的接线图,正确连接传感
器与测量设备或系统。
3.供电:根据传感器的工作电压要求,为传感器提供适当的电源。
4.编程:根据传感器的规格书和厂家提供的编程手册,编写适当的代
码来读取传感器的输出数据。
5.数据处理:根据应用需求,对传感器输出的数据进行处理和分析,
例如进行滤波、计算速度、位移等。
为了确保准确测量加速度,加速度传感器需要进行校准。
校准可分为
静态校准和动态校准两种方式。
1.静态校准:将加速度传感器放置在静止状态下,记录其输出值,然
后根据物理的力学原理进行校准,使传感器的输出与已知准确的加速度匹配。
2.动态校准:将加速度传感器暴露在已知加速度的环境中,比如进行
加速、减速、旋转等,通过比较传感器的输出与已知的加速度进行校准。
1.测量范围:指传感器能够测量的最大加速度范围。
2.灵敏度:指传感器对于单位加速度变化的输出变化。
3.频率响应:指传感器能够精确测量的频率范围。
4.噪声:指传感器输出的不确定性,通常以均方根值(RMS)来表示。
5.分辨率:指传感器能够区分的最小加速度变化。
6.非线性度:指传感器输出与输入之间的误差。
7.温度效应:指传感器输出与环境温度变化之间的关系。
总结:。
Android开发获取传感器数据的⽅法⽰例【加速度传感器,磁场传感器,光线传感器,⽅向传感器】本⽂实例讲述了Android开发获取传感器数据的⽅法。
分享给⼤家供⼤家参考,具体如下:package mobile.android.sensor;import java.util.List;import android.app.Activity;import android.hardware.Sensor;import android.hardware.SensorEvent;import android.hardware.SensorEventListener;import android.hardware.SensorManager;import android.os.Bundle;import android.widget.TextView;public class Main extends Activity implements SensorEventListener {private TextView tvAccelerometer;private TextView tvMagentic;private TextView tvLight;private TextView tvOrientation;private TextView tvSensors;@Overridepublic void onCreate(Bundle savedInstanceState) {super.onCreate(savedInstanceState);setContentView(yout.main);// 获得SensorManager对象SensorManager sensorManager = (SensorManager) getSystemService(SENSOR_SERVICE);// 注册加速度传感器sensorManager.registerListener(this,sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),SensorManager.SENSOR_DELAY_FASTEST);// 注册磁场传感器sensorManager.registerListener(this,sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD),SensorManager.SENSOR_DELAY_FASTEST);// 注册光线传感器sensorManager.registerListener(this,sensorManager.getDefaultSensor(Sensor.TYPE_LIGHT),SensorManager.SENSOR_DELAY_FASTEST);// 注册⽅向传感器sensorManager.registerListener(this,sensorManager.getDefaultSensor(Sensor.TYPE_ORIENTATION),SensorManager.SENSOR_DELAY_FASTEST);tvAccelerometer = (TextView) findViewById(Accelerometer);tvMagentic = (TextView) findViewById(Magentic);tvLight = (TextView) findViewById(Light);tvOrientation = (TextView) findViewById(Orientation);tvSensors = (TextView) findViewById(Sensors);// 获得当前⼿机⽀持的所有传感器List<Sensor> sensors = sensorManager.getSensorList(Sensor.TYPE_ALL);for (Sensor sensor : sensors) {// 输出当前传感器的名称tvSensors.append(sensor.getName() + "\n");}}@Overridepublic void onSensorChanged(SensorEvent event) {// 通过getType⽅法获得当前传回数据的传感器类型switch (event.sensor.getType()) {case Sensor.TYPE_ACCELEROMETER: // 处理加速度传感器传回的数据String accelerometer = "加速度\n" + "X:" + event.values[0] + "\n"+ "Y:" + event.values[1] + "\n" + "Z:" + event.values[2]+ "\n";tvAccelerometer.setText(accelerometer);break;case Sensor.TYPE_LIGHT: // 处理光线传感器传回的数据tvLight.setText("亮度:" + event.values[0]);break;case Sensor.TYPE_MAGNETIC_FIELD: // 处理磁场传感器传回的数据String magentic = "磁场\n" + "X:" + event.values[0] + "\n" + "Y:"+ event.values[1] + "\n" + "Z:" + event.values[2] + "\n";tvMagentic.setText(magentic);break;case Sensor.TYPE_ORIENTATION: // 处理⽅向传感器传回的数据String orientation = "⽅向\n" + "X:" + event.values[0] + "\n" + "Y:"+ event.values[1] + "\n" + "Z:" + event.values[2] + "\n";tvOrientation.setText(orientation);break;}}@Overridepublic void onAccuracyChanged(Sensor sensor, int accuracy) {}}PS:这⾥获得的只是传感器采集数据,还需要对数据分析,变成有⽤的信息。
android传感器应用课程设计一、课程目标知识目标:1. 理解Android平台传感器的基本概念、种类和工作原理;2. 掌握在Android应用中使用传感器的编程方法;3. 学会分析传感器数据,实现相应的功能应用。
技能目标:1. 能够运用所学知识编写简单的Android传感器应用程序;2. 培养解决实际问题时运用传感器技术的思维和能力;3. 提高自主学习、合作探究和动手实践的能力。
情感态度价值观目标:1. 培养学生对Android传感器技术应用的兴趣,激发学习热情;2. 培养学生团队协作意识,学会共同解决问题;3. 增强学生对科技创新的认识,提高创新精神和实践能力。
课程性质:本课程为实践性较强的学科,结合Android传感器技术,注重培养学生的动手操作能力和实际问题解决能力。
学生特点:学生具备一定的编程基础,对Android应用开发感兴趣,具备一定的自主学习能力。
教学要求:教师需采用任务驱动、案例教学等方法,引导学生通过实践掌握传感器应用开发技巧,提高学生的综合运用能力。
教学过程中注重学生个体差异,鼓励学生相互交流、合作学习,实现共同提高。
通过本课程的学习,使学生能够达到课程目标,并在实际应用中展示所学成果。
二、教学内容1. 传感器基本原理:介绍传感器的作用、种类,重点讲解加速度传感器、磁场传感器、光线传感器和距离传感器的工作原理。
教材章节:第3章 传感器原理与应用2. Android传感器框架:学习Android系统中传感器框架的使用,包括SensorManager、SensorEventListener等核心类。
教材章节:第4章 Android传感器框架3. 传感器编程实践:a. 编写简单的传感器应用程序,如:计步器、指南针等;b. 分析传感器数据,实现功能应用,如:根据光线传感器自动调整屏幕亮度等。
教材章节:第5章 传感器编程实践4. 项目案例:分组进行项目实践,综合运用所学传感器知识,完成一个具有实际应用价值的Android传感器应用。
/** ADXL345模块** 用途:ADXL345模块IIC测试程序*/#include <REG51.H>#include <math.h> //Keil library#include <stdio.h> //Keil library#include <INTRINS.H>#define uchar unsigned char#define uint unsigned int#define DataPort P2 //LCD1602数据端口sbit SCL=P0^4; //IIC时钟引脚定义sbit SDA=P0^3; //IIC数据引脚定义sbit LCM_RS=P0^2; //LCD1602命令端口sbit LCM_RW=P0^1; //LCD1602命令端口sbit LCM_EN=P0^0; //LCD1602命令端口#define SlaveAddress 0xA6 //定义器件在IIC总线中的从地址,根据ALT ADDRESS 地址引脚不同修改//ALT ADDRESS引脚接地时地址为0xA6,接电源时地址为0x3Atypedef unsigned char BYTE;typedef unsigned short WORD;BYTE BUF[8]; //接收数据缓存区uchar ge,shi,bai,qian,wan; //显示变量int dis_data; //变量void delay(unsigned int k);void InitLcd(); //初始化lcd1602void Init_ADXL345(void); //初始化ADXL345void WriteDataLCM(uchar dataW);void WriteCommandLCM(uchar CMD,uchar Attribc);void DisplayOneChar(uchar X,uchar Y,uchar DData);void conversion(uint temp_data);void Single_Write_ADXL345(uchar REG_Address,uchar REG_data); //单个写入数据uchar Single_Read_ADXL345(uchar REG_Address); //单个读取内部寄存器数据void Multiple_Read_ADXL345(); //连续的读取内部寄存器数据//------------------------------------void Delay5us();void Delay5ms();void ADXL345_Start();void ADXL345_Stop();void ADXL345_SendACK(bit ack);bit ADXL345_RecvACK();void ADXL345_SendByte(BYTE dat);BYTE ADXL345_RecvByte();void ADXL345_ReadPage();void ADXL345_WritePage();//-----------------------------------//********************************************************* void conversion(uint temp_data){wan=temp_data/10000+0x30 ;temp_data=temp_data%10000; //取余运算qian=temp_data/1000+0x30 ;temp_data=temp_data%1000; //取余运算bai=temp_data/100+0x30 ;temp_data=temp_data%100; //取余运算shi=temp_data/10+0x30 ;temp_data=temp_data%10; //取余运算ge=temp_data+0x30;}/*******************************/void delay(unsigned int k){unsigned int i,j;for(i=0;i<k;i++){for(j=0;j<121;j++){;}}}/*******************************/void WaitForEnable(void){DataPort=0xff;LCM_RS=0;LCM_RW=1;_nop_();LCM_EN=1;_nop_();_nop_();while(DataPort&0x80);LCM_EN=0;}/*******************************/void WriteCommandLCM(uchar CMD,uchar Attribc){if(Attribc)WaitForEnable();LCM_RS=0;LCM_RW=0;_nop_();DataPort=CMD;_nop_();LCM_EN=1;_nop_();_nop_();LCM_EN=0;}/*******************************/void WriteDataLCM(uchar dataW){WaitForEnable();LCM_RS=1;LCM_RW=0;_nop_();DataPort=dataW;_nop_();LCM_EN=1;_nop_();_nop_();LCM_EN=0;}/***********************************/void InitLcd(){WriteCommandLCM(0x38,1);WriteCommandLCM(0x08,1);WriteCommandLCM(0x01,1);WriteCommandLCM(0x06,1);WriteCommandLCM(0x0c,1);}/***********************************/void DisplayOneChar(uchar X,uchar Y,uchar DData){Y&=1;X&=15;if(Y)X|=0x40;X|=0x80;WriteCommandLCM(X,0);WriteDataLCM(DData);}/**************************************延时5微秒(STC90C52RC@12M)不同的工作环境,需要调整此函数,注意时钟过快时需要修改当改用1T的MCU时,请调整此延时函数**************************************/void Delay5us(){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}/**************************************延时5毫秒(STC90C52RC@12M)不同的工作环境,需要调整此函数当改用1T的MCU时,请调整此延时函数**************************************/ void Delay5ms(){WORD n = 560;while (n--);}/**************************************起始信号**************************************/ void ADXL345_Start(){SDA = 1; //拉高数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 0; //产生下降沿Delay5us(); //延时SCL = 0; //拉低时钟线}/**************************************停止信号**************************************/ void ADXL345_Stop(){SDA = 0; //拉低数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 1; //产生上升沿Delay5us(); //延时}/**************************************发送应答信号入口参数:ack (0:ACK 1:NAK)**************************************/void ADXL345_SendACK(bit ack){SDA = ack; //写应答信号SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}/**************************************接收应答信号**************************************/bit ADXL345_RecvACK(){SCL = 1; //拉高时钟线Delay5us(); //延时CY = SDA; //读应答信号SCL = 0; //拉低时钟线Delay5us(); //延时return CY;}/**************************************向IIC总线发送一个字节数据**************************************/void ADXL345_SendByte(BYTE dat){BYTE i;for (i=0; i<8; i++) //8位计数器{dat <<= 1; //移出数据的最高位SDA = CY; //送数据口SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}ADXL345_RecvACK();}/**************************************从IIC总线接收一个字节数据**************************************/BYTE ADXL345_RecvByte(){BYTE i;BYTE dat = 0;SDA = 1; //使能内部上拉,准备读取数据,for (i=0; i<8; i++) //8位计数器{dat <<= 1;SCL = 1; //拉高时钟线Delay5us(); //延时dat |= SDA; //读数据SCL = 0; //拉低时钟线Delay5us(); //延时}return dat;}//******单字节写入*******************************************void Single_Write_ADXL345(uchar REG_Address,uchar REG_data){ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页ADXL345_SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页ADXL345_Stop(); //发送停止信号}//********单字节读取*****************************************uchar Single_Read_ADXL345(uchar REG_Address){ uchar REG_data;ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(REG_Address); //发送存储单元地址,从0开始ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号REG_data=ADXL345_RecvByte(); //读出寄存器数据ADXL345_SendACK(1);ADXL345_Stop(); //停止信号return REG_data;}//*********************************************************////连续读出ADXL345内部加速度数据,地址范围0x32~0x37////*********************************************************void Multiple_read_ADXL345(void){ uchar i;ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(0x32); //发送存储单元地址,从0x32开始ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF {BUF[i] = ADXL345_RecvByte(); //BUF[0]存储0x32地址中的数据if (i == 5){ADXL345_SendACK(1); //最后一个数据需要回NOACK }else{ADXL345_SendACK(0); //回应ACK}}ADXL345_Stop(); //停止信号Delay5ms();}//*****************************************************************//初始化ADXL345,根据需要请参考pdf进行修改************************void Init_ADXL345(){Single_Write_ADXL345(0x31,0x0B); //测量范围,正负16g,13位模式Single_Write_ADXL345(0x2C,0x08); //速率设定为12.5 参考pdf13页Single_Write_ADXL345(0x2D,0x08); //选择电源模式参考pdf24页Single_Write_ADXL345(0x2E,0x80); //使能DATA_READY 中断Single_Write_ADXL345(0x1E,0x00); //X 偏移量根据测试传感器的状态写入pdf29页Single_Write_ADXL345(0x1F,0x00); //Y 偏移量根据测试传感器的状态写入pdf29页Single_Write_ADXL345(0x20,0x05); //Z 偏移量根据测试传感器的状态写入pdf29页}//显示x轴void display_x(){ float temp;dis_data=(BUF[1]<<8)+BUF[0]; //合成数据if(dis_data<0){dis_data=-dis_data;DisplayOneChar(10,0,'-'); //显示正负符号位}else DisplayOneChar(10,0,' '); //显示空格temp=(float)dis_data*3.9; //计算数据和显示,查考ADXL345快速入门第4页conversion(temp); //转换出显示需要的数据DisplayOneChar(8,0,'X');DisplayOneChar(9,0,':');DisplayOneChar(11,0,qian);DisplayOneChar(12,0,'.');DisplayOneChar(13,0,bai);DisplayOneChar(14,0,shi);DisplayOneChar(15,0,' ');}//*********************************************************************** //显示y轴void display_y(){ float temp;dis_data=(BUF[3]<<8)+BUF[2]; //合成数据if(dis_data<0){dis_data=-dis_data;DisplayOneChar(2,1,'-'); //显示正负符号位}else DisplayOneChar(2,1,' '); //显示空格temp=(float)dis_data*3.9; //计算数据和显示,查考ADXL345快速入门第4页conversion(temp); //转换出显示需要的数据DisplayOneChar(0,1,'Y'); //第1行,第0列显示yDisplayOneChar(1,1,':');DisplayOneChar(3,1,qian);DisplayOneChar(4,1,'.');DisplayOneChar(5,1,bai);DisplayOneChar(6,1,shi);DisplayOneChar(7,1,' ');}//显示z轴void display_z(){float temp;dis_data=(BUF[5]<<8)+BUF[4]; //合成数据if(dis_data<0){dis_data=-dis_data;DisplayOneChar(10,1,'-'); //显示负符号位}else DisplayOneChar(10,1,' '); //显示空格temp=(float)dis_data*3.9; //计算数据和显示,查考ADXL345快速入门第4页conversion(temp); //转换出显示需要的数据DisplayOneChar(8,1,'Z'); //第0行,第10列显示ZDisplayOneChar(9,1,':');DisplayOneChar(11,1,qian);DisplayOneChar(12,1,'.');DisplayOneChar(13,1,bai);DisplayOneChar(14,1,shi);DisplayOneChar(15,1,' ');}//*********************************************************//******主程序********//*********************************************************void main(){uchar devid;delay(500); //上电延时InitLcd(); //液晶初始化ADXL345DisplayOneChar(0,0,'A');DisplayOneChar(1,0,'D');DisplayOneChar(2,0,'X');DisplayOneChar(3,0,'L');DisplayOneChar(4,0,'3');DisplayOneChar(5,0,'4');DisplayOneChar(6,0,'5');Init_ADXL345(); //初始化ADXL345devid=Single_Read_ADXL345(0X00); //读出的数据为0XE5,表示正确while(1) //循环{Multiple_Read_ADXL345(); //连续读出数据,存储在BUF中display_x(); //---------显示X轴display_y(); //---------显示Y轴display_z(); //---------显示Z轴delay(200); //延时}}#include<reg52.h>#include<math.h>#include<stdio.h>#include<intrins.h>#define uint unsigned int#define uchar unsigned charuchar code shu[]={0xF8,0x04,0x04,0x04,0xF8,0x00,0x01,0x02,0x02,0x02,0x01,0x00, //00x00,0x08,0xFC,0x00,0x00,0x00,0x00,0x02,0x03,0x02,0x00,0x00, //10x18,0x84,0x44,0x24,0x18,0x00,0x03,0x02,0x02,0x02,0x02,0x00, //20x08,0x04,0x24,0x24,0xD8,0x00,0x01,0x02,0x02,0x02,0x01,0x00, //30x40,0xB0,0x88,0xFC,0x80,0x00,0x00,0x00,0x00,0x03,0x02,0x00, //40x3C,0x24,0x24,0x24,0xC4,0x00,0x01,0x02,0x02,0x02,0x01,0x00, //50xF8,0x24,0x24,0x2C,0xC0,0x00,0x01,0x02,0x02,0x02,0x01,0x00, //60x0C,0x04,0xE4,0x1C,0x04,0x00,0x00,0x00,0x03,0x00,0x00,0x00, //70xD8,0x24,0x24,0x24,0xD8,0x00,0x01,0x02,0x02,0x02,0x01,0x00, //80x38,0x44,0x44,0x44,0xF8,0x00,0x00,0x03,0x02,0x02,0x01,0x00, //90x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0c,0x0c,0x00,0x00, //. 100x20,0x20,0x20,0x20,0x20,0x00,0x00,0x00,0x00,0x00,0x00,0x00, //- 110x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 // 空白12 };uchar BUF[6]={0,0,0,0,0,0};int date;sbit SCL=P2^0; //IIC时钟引脚定义sbit SDA=P2^1; //IIC数据引脚定义sbit CE=P2^3; //片选sbit RES=P2^4; //复位sbit DC=P2^5; //数据1和命令0切换sbit DATE=P2^6; //数据输入端sbit CLK=P2^7; //同步时钟输入端void init_5110();void init_S51();void write_byte(uchar); //写入一个字节void write_add(uchar,uchar); //写位置地址void write_A(uchar);void write_B(uchar);void write_ID(uchar,uchar,uchar);void clear_5110();void delayms(uint);#define SlaveAddress 0xA6 //定义器件在IIC总线中的从地址,根据ALT ADDRESS 地址引脚不同修改void Single_Write_ADXL345(uchar REG_Address,uchar REG_data); //单个写入数据uchar Single_Read_ADXL345(uchar REG_Address); //单个读取内部寄存器数据void Multiple_Read_ADXL345(); //连续的读取内部寄存器数据//------------------------------------void Init_ADXL345();void ADXL345_Start();void ADXL345_Stop();void ADXL345_SendACK(bit ack);bit ADXL345_RecvACK();void ADXL345_SendByte(uchar dat);uchar ADXL345_RecvByte();void ADXL345_ReadPage();void ADXL345_WritePage();//-----------------------------------void main(){uchar devid;delayms(500); //上电延时init_5110();write_ID(0,0,1);// write_ID(0,2,2);Init_ADXL345(); //初始化ADXL345 // 4.5MS devid=Single_Read_ADXL345(0X00); //读出的数据为0XE5,表示正确// delayms(2000);BUF[2]=0x7f;BUF[3]=1;while(1) //循环{Multiple_Read_ADXL345(); //连续读出数据,存储在BUF中读数据时间2毫秒多Multiple_Read_ADXL345(); //连续读出数据,存储在BUF中读数据时间2毫秒多delayms(2);write_ID(0,0,1);write_ID(0,2,2);write_ID(0,4,3);delayms(400); //延时// clear_5110();// delayms(1000);}}/**************************************起始信号**************************************/void ADXL345_Start(){uchar i;SDA = 1; //拉高数据线SCL = 1; //拉高时钟线for(i=2;i>0;i--); //延时5usSDA = 0; //产生下降沿for(i=2;i>0;i--); //延时5usSCL = 0; //拉低时钟线}/**************************************停止信号**************************************/void ADXL345_Stop(){uchar i;SDA = 0; //拉低数据线SCL = 1; //拉高时钟线for(i=2;i>0;i--); //延时5usSDA = 1; //产生上升沿for(i=2;i>0;i--); //延时5us}/**************************************发送应答信号入口参数:ack (0:ACK 1:NAK)**************************************/void ADXL345_SendACK(bit ack){uchar i;SDA = ack; //写应答信号SCL = 1; //拉高时钟线for(i=2;i>0;i--); //延时5usSCL = 0; //拉低时钟线for(i=2;i>0;i--); //延时5us}/**************************************接收应答信号**************************************/bit ADXL345_RecvACK(){uchar i;SCL = 1; //拉高时钟线for(i=2;i>0;i--); //延时5usCY = SDA; //读应答信号SCL = 0; //拉低时钟线for(i=2;i>0;i--); //延时5usreturn CY;}/**************************************向IIC总线发送一个字节数据**************************************/void ADXL345_SendByte(uchar dat){uchar i,j;for (i=0; i<8; i++) //8位计数器{dat <<= 1; //移出数据的最高位SDA = CY; //送数据口SCL = 1; //拉高时钟线for(j=2;j>0;j--); //延时5usSCL = 0; //拉低时钟线for(j=2;j>0;j--); //延时5us}ADXL345_RecvACK();}/**************************************从IIC总线接收一个字节数据**************************************/uchar ADXL345_RecvByte(){uchar i,j;uchar dat = 0;SDA = 1; //使能内部上拉,准备读取数据,for (i=0; i<8; i++) //8位计数器{dat <<= 1;SCL = 1; //拉高时钟线for(j=2;j>0;j--); //延时5usdat |= SDA; //读数据SCL = 0; //拉低时钟线for(j=2;j>0;j--); //延时5us}return dat;}//******单字节写入*******************************************void Single_Write_ADXL345(uchar REG_Address,uchar REG_data){ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页ADXL345_SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页ADXL345_Stop(); //发送停止信号}//********单字节读取*****************************************uchar Single_Read_ADXL345(uchar REG_Address){ uchar REG_data;ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+ 写信号ADXL345_SendByte(REG_Address); //发送存储单元地址,从0开始ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress+1); //发送设备地址+ 读信号REG_data=ADXL345_RecvByte(); //读出寄存器数据ADXL345_SendACK(1);ADXL345_Stop(); //停止信号return REG_data;}//*********************************************************//连续读出ADXL345内部加速度数据,地址范围0x32~0x37//*********************************************************void Multiple_read_ADXL345(void){ uchar i;ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(0x32); //发送存储单元地址,从0x32开始ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF {BUF[i] = ADXL345_RecvByte(); //BUF[0]存储0x32地址中的数据if (i == 5){ADXL345_SendACK(1); //最后一个数据需要回NOACK }else{ADXL345_SendACK(0); //回应ACK}}ADXL345_Stop(); //停止信号for(i=2;i>0;i--); //延时5us}//*****************************************************************//初始化ADXL345,根据需要请参考pdf进行修改************************void Init_ADXL345(){Single_Write_ADXL345(0x31,0x0B); //测量范围,正负16g,13位模式Single_Write_ADXL345(0x2C,0x08); //速率设定为12.5 参考pdf13页Single_Write_ADXL345(0x2D,0x08); //选择电源模式参考pdf24页Single_Write_ADXL345(0x2E,0x80); //使能DATA_READY 中断Single_Write_ADXL345(0x1E,0x00); //X 偏移量根据测试传感器的状态写入pdf29页Single_Write_ADXL345(0x1F,0x00); //Y 偏移量根据测试传感器的状态写入pdf29页Single_Write_ADXL345(0x20,0x05); //Z 偏移量根据测试传感器的状态写入pdf29页}void init_5110(){RES=1; //可以没有RES=0;RES=1;DC=0;write_byte(0x21);write_byte(0xc8);write_byte(0x20);write_byte(0x0c);clear_5110();}void write_byte(uchar add){uchar i;CE=0;for(i=0;i<8;i++){CLK=0;if(add&0x80)DATE=1;elseDATE=0;CLK=1;add<<=1;}CE=1;CLK=0;}void write_add(uchar x,uchar y) //横纵坐标X 0~83 Y 0~5{write_byte(0x80|x); //横坐标write_byte(0x40|y); //纵坐标}void clear_5110(){uint i;write_add(0,0);DC=1;for(i=0;i<504;i++){write_byte(0x00); //write_byte(0);}DC=0;}void write_ID(uchar x,uchar y,uchar z){uchar a;uint temp;if(z==1){date=(int)(BUF[1]<<8)+BUF[0];}if(z==2){date=(BUF[3]<<8)+BUF[2]; //}if(z==3){date=(BUF[5]<<8)+BUF[4];}if(date<0) // - 号{a=11;date=-date;}else{a=12;// date=date;}temp=(float)date*3.9; //计算数据和显示,查考ADXL345快速入门第4页// 空白// temp=(float)date*3.9; // 应该可以减少两个字节// temp=z;date=temp;/* temp=date;date=date/10;temp=temp*4+date; */// date=temp;write_add(x,y);DC=1;write_A(a);write_A(temp/10000);temp=temp%10000;write_A(temp/1000); temp=temp%1000;write_A(10); // 小数点write_A(temp/100);temp=temp%100;write_A(temp/10); temp=temp%10;write_A(temp);DC=0;temp=date; //确定temp 值不发生变化write_add(x,y+1);DC=1;write_B(a);write_B(temp/10000);temp=temp%10000;write_B(temp/1000); temp=temp%1000;write_B(10); // 小数点write_B(temp/100);temp=temp%100;write_B(temp/10); temp=temp%10;write_B(temp);DC=0;}void write_A(uchar date){uchar i,m;m=date*12;for(i=0;i<6;i++){write_byte(shu[m]);m++;}}void write_B(uchar date){uchar i,m;m=date*12+6;for(i=0;i<6;i++){write_byte(shu[m]);m++;}}void delayms(uint a){uchar x,y;uint z;for(z=a;z>0;z--)for(x=2;x>0;x--)for(y=226;y>0;y--); }。
Android操作系统11种传感器介绍在Android2.3 gingerbread系统中,google提供了11种传感器供应用层使用。
#define SENSOR_TYPE_ACCELEROMETER 1 //加速度#define SENSOR_TYPE_MAGNETIC_FIELD 2 //磁力#define SENSOR_TYPE_ORIENTATION 3 //方向#define SENSOR_TYPE_GYROSCOPE 4 //陀螺仪#define SENSOR_TYPE_LIGHT 5 //光线感应#define SENSOR_TYPE_PRESSURE 6 //压力#define SENSOR_TYPE_TEMPERATURE 7 //温度#define SENSOR_TYPE_PROXIMITY 8 //接近#define SENSOR_TYPE_GRAVITY 9 //重力#define SENSOR_TYPE_LINEAR_ACCELERATION 10//线性加速度#define SENSOR_TYPE_ROTATION_VECTOR 11//旋转矢量我们依次看看这十一种传感器1 加速度传感器加速度传感器又叫G-sensor,返回x、y、z三轴的加速度数值。
该数值包含地心引力的影响,单位是m/s^2。
将手机平放在桌面上,x轴默认为0,y轴默认0,z轴默认9.81。
将手机朝下放在桌面上,z轴为-9.81。
将手机向左倾斜,x轴为正值。
将手机向右倾斜,x轴为负值。
将手机向上倾斜,y轴为负值。
将手机向下倾斜,y轴为正值。
加速度传感器可能是最为成熟的一种mems产品,市场上的加速度传感器种类很多。
手机中常用的加速度传感器有BOSCH(博世)的BMA系列,AMK的897X系列,ST的LIS3X系列等。
这些传感器一般提供±2G至±16G的加速度测量范围,采用I2C或SPI接口和MCU 相连,数据精度小于16bit。
android 屏幕旋转原理Android屏幕旋转原理在使用Android手机时,我们经常会遇到屏幕旋转的情况。
无论是横屏还是竖屏,都能够适应不同的使用场景,提供更好的用户体验。
那么,Android屏幕旋转是如何实现的呢?本文将从硬件和软件两个方面来介绍Android屏幕旋转的原理。
一、硬件方面在硬件方面,实现屏幕旋转主要依赖于手机的陀螺仪和加速度传感器。
陀螺仪能够感知手机的旋转角度,而加速度传感器则能够感知手机的重力加速度。
通过这两个传感器的数据,Android系统可以判断手机的当前姿态,并做出相应的屏幕旋转操作。
当手机旋转时,陀螺仪会感知到手机的角度变化,并通过传感器将旋转角度的数据传递给Android系统。
Android系统根据这些数据来判断手机的当前方向,然后通过系统服务来调整屏幕的显示方向。
同时,加速度传感器也会感知到手机的重力加速度的变化,这些数据也会被Android系统用来判断手机的姿态。
二、软件方面在软件方面,Android系统通过监听传感器数据的变化来实现屏幕旋转。
当手机的旋转角度或姿态发生变化时,系统会立即响应并调整屏幕的显示方向。
Android系统会根据传感器数据的变化,判断手机当前的方向,然后将这些信息传递给应用程序。
应用程序可以通过Android提供的API来获取屏幕旋转的信息。
通过这些信息,应用程序可以做出相应的布局调整,以适应不同方向的屏幕显示。
例如,当用户将手机横屏时,应用程序可以调整布局,使得界面更宽敞,显示更多的内容。
Android系统还提供了一些配置项,可以让开发者灵活地控制屏幕旋转的行为。
开发者可以在应用程序的清单文件中设置屏幕旋转的方向,以限制屏幕的旋转范围。
这样可以保证应用程序在特定的方向下有更好的显示效果,并提升用户体验。
总结:Android屏幕旋转的原理是通过硬件和软件的配合实现的。
通过陀螺仪和加速度传感器的数据,Android系统能够感知手机的旋转角度和姿态变化,从而做出相应的屏幕旋转操作。
基于加速度传感器的动作识别电路设计动作识别技术已经在许多领域中得到广泛应用,并在人机交互、体育训练、健康监测等方面具有巨大的潜力。
基于加速度传感器的动作识别电路设计是实现这一目标的重要一环。
本文将深入探讨动作识别电路的设计原理以及关键技术,并结合实际案例进行详细阐述。
一、加速度传感器简介加速度传感器是一种用于测量物体加速度的传感器。
它能够感知物体在三个坐标轴上的加速度,并将其转化为相应的电信号输出。
加速度传感器广泛应用于汽车碰撞安全系统、游戏控制器以及智能手机等设备中。
二、动作识别电路的设计原理基于加速度传感器的动作识别电路主要通过分析物体在不同时间段内的加速度变化来判断所进行的动作。
其设计原理可以分为以下几个步骤:1. 数据采集:通过加速度传感器采集物体的加速度数据,并将其转化为数字信号。
这些数据包括物体在三个坐标轴上的加速度值。
2. 特征提取:通过对采集到的加速度数据进行处理,提取具有代表性的特征。
常用的特征包括峰值、频率、能量等。
3. 特征选择:根据所要识别的动作类型,选择适合的特征进行判别。
不同的动作可能需要关注不同的特征。
4. 分类器设计:根据选定的特征,设计合适的分类器来对所要识别的动作进行判断。
常用的分类器有支持向量机 (SVM)、人工神经网络 (ANN) 等。
三、关键技术与挑战在基于加速度传感器的动作识别电路设计过程中,有一些关键技术和挑战需要面对:1. 数据预处理:由于加速度传感器可能受到噪声影响,需要进行数据预处理来降低噪声对动作识别的干扰。
常用的方法有滤波、均值平滑等。
2. 特征提取与选择:如何从原始数据中提取出具有代表性的特征,并选择合适的特征用于动作分类是一个重要问题。
这需要充分理解不同动作的特征差异,并选择适合的算法进行特征提取和选择。
3. 分类算法:选择适合的分类算法对于动作识别的准确性至关重要。
不同的分类算法有不同的适用场景和性能指标。
需要根据具体需求进行选择。
4. 实时性与功耗:动作识别往往需要在实时性要求较高的环境中进行,并且对于移动设备等低功耗场景的需求也很重要。
本文译自:/guide/topics/sensors/sensors_motion.htmlAndroid平台提供了几个能够监视设备移动的传感器。
其中的两个是基于硬件的(加速度传感器和陀螺仪),有三个传感器既可以是基于硬件的,也可以是基于软件的(重力传感器、线性加速度传感器和旋转矢量传感器)。
例如,在某些基于软件传感器的设备上会从加速度传感器和磁力仪中提取它们的数据,但是在其他的设备上,它们也可以使用陀螺仪来提取数据。
大多数Android设备都有加速度传感器和陀螺仪。
基于软件的传感器的有效性是可变的,因为它们要依赖一个或多个硬件传感器来提取对应的数据。
运动传感器用于监视设备的移动,如:倾斜、振动、旋转或摆动。
移动通常是直接的用户输入的反映(如,用户在游戏中操作汽车或控制一个球),但也能够是设备所处的物理环境的反映(如,驾驶汽车时的位置移动)。
在第一种场景中,你要相对于设备的参照系或应用程序的参照系来监视设备的移动,在第二种场景中,你要相对于全球参照系来监视设备的移动。
通常,移动传感器本身并不用于监视设备的位置,但它们能够跟其他传感器一起来使用,例如跟地磁传感器一起来判断设备相对于全球参照系统的的位置(更多信息,请看位置传感器)。
所有的移动传感器的每个SensorEvent都会返回传感器值的多维数组。
例如,一个加速度传感器的传感器事件会返回三个坐标轴方向的加速度力,陀螺仪会返回三个坐标轴方向旋转速率。
这些数据是以float数组的形式跟SensorEvent参数一起被返回的。
表1概要介绍了Android平台上可用的移动传感器。
1标量部分是一个可选值。
对于移动检测和监视,旋转矢量传感器和重力传感器是使用频率最高的传感器。
旋转矢量传感器尤其灵活,可广泛的应用于移动相关的任务,如,检测手势、监视角度变化、监视相对的方向变化等。
例如:如果你正在开发一款使用2维或3维罗盘来增强现实感游戏,或增强相机的稳定性的应用程序,那么旋转矢量传感器是非常理想的选择。
手机加速度传感器原理
手机加速度传感器原理是通过感应物体的加速度来测量手机的加速度,从而实现自动定向、改变屏幕方向以及智能运动等功能。
手机加速度传感器通常采用微电机加速度传感元件,其原理基于微电机受力的技术。
微电机内部包含一块加速度传感器芯片,该芯片由微机电系统(MEMS)构成,内部有微小质量的弹簧悬挂在硅晶振膜上,并与该膜一起叠加在芯片上。
当手机受到加速度作用时,加速度传感器会感知到加速度的变化。
这种变化通过弹簧的变形传递给硅晶振膜,使其产生位移。
硅晶振膜上有电极,当振膜位移时,电极会与传感器芯片上的电极相对运动,产生电容变化。
传感器芯片内部会通过电路将电容变化转换为电压信号,再经过放大和AD转换等处理,最终将数字信号传送给手机的处理器。
手机的处理器根据这些信号进行解析和处理,得到手机在三个坐标轴方向上的加速度值。
手机加速度传感器的精度和灵敏度取决于传感器的质量、芯片设计和信号处理算法等因素。
目前的手机加速度传感器能够实现较高的精度和灵敏度,使得手机能够准确获取加速度信息,并实现各种智能功能。
Android加速度传感器实现“摇⼀摇”,带⼿机振动Activity[java]1. package com.lmw.android.test;2.3. import android.app.Activity;4. import android.os.Bundle;5. import android.os.Handler;6. import android.os.Vibrator;7. import android.view.View;8. import android.widget.Toast;9.10. import com.lmw.android.test.ShakeListener.OnShakeListener;11.12. public class ShakeActivity extends Activity {13.14. ShakeListener mShakeListener = null;15. Vibrator mVibrator;16.17. @Override18. public void onCreate(Bundle savedInstanceState) {19. // TODO Auto-generated method stub20. super.onCreate(savedInstanceState);21. setContentView(yout.shake);22. // drawerSet ();//设置 drawer监听切换按钮的⽅向23.24. //获得振动器服务25. mVibrator = (Vibrator) getApplication().getSystemService(VIBRATOR_SERVICE);26. //实例化加速度传感器检测类27. mShakeListener = new ShakeListener(ShakeActivity.this);28.29. mShakeListener.setOnShakeListener(new OnShakeListener() {30.31. public void onShake() {32. mShakeListener.stop();33. startVibrato(); // 开始震动34. new Handler().postDelayed(new Runnable() {35. @Override36. public void run() {37. Toast mtoast;38. mtoast = Toast.makeText(ShakeActivity.this,39. "呵呵,成功了!。