无人驾驶地铁人员防护开关方案研究
- 格式:pdf
- 大小:321.99 KB
- 文档页数:5
地铁安防系统方案地铁安防系统方案引言随着城市的快速发展,地铁已成为现代交通的重要组成部分。
然而,地铁同时也面临着各种安全威胁,如恐怖袭击、抢劫和非法入侵等。
为了保障地铁乘客和工作人员的安全,建立一套稳定有效的地铁安防系统至关重要。
本文将介绍一套地铁安防系统的方案,以提供参考和指导。
系统概述地铁安防系统是一种综合应用技术,旨在通过使用多个安全设备和管理系统,实时监控和管理地铁车站、车辆和隧道等地铁区域。
地铁安防系统的核心功能包括视频监控、入侵检测、人员管理和紧急求助等。
1. 视频监控地铁安防系统中的视频监控是最基本的功能之一。
通过在地铁车站、乘客通道和车辆内安装摄像头,系统可以实时监控和录制各区域的画面。
视频监控系统可以配备高清摄像头,并利用网络技术将画面传输到指定的监控中心。
监控中心可以实时观察画面,发现可疑行为并采取相应的措施。
2. 入侵检测为了防止恐怖袭击和非法入侵,地铁安防系统需要配备入侵检测设备。
这些设备可以通过使用红外传感器、微波雷达和热像仪等技术来检测地铁车站和通道中的人员活动。
一旦系统检测到可疑行为,会立即触发预警,并自动通知相关人员进行处理。
3. 人员管理地铁安防系统还需要具备人员管理功能,以确保只有经过授权的人员才能进入敏感区域。
这可以通过使用身份识别技术,如指纹识别、人脸识别和二维码扫描等实现。
在地铁车站和员工通道设立识别设备,只有经过验证的人员才能进入。
4. 紧急求助在紧急情况下,地铁安防系统应具备紧急求助功能。
为此,可以在地铁车站、车辆和通道等区域设置紧急报警按钮。
一旦乘客或工作人员遇到危险或需要帮助,他们只需按下按钮,系统将立即发送求助信号,并将其位置信息传输到监控中心。
监控中心将采取相应措施,包括派遣保安人员、通知警方或提供适当的指示。
5. 数据存储和分析地铁安防系统应具备足够的存储空间,以保存视频监控记录和其他相关数据。
存储设备可以是物理服务器或云存储系统,以保证数据的安全性和可靠性。

随着我国城市化进程的加快,地铁作为城市交通的重要组成部分,其建设规模不断扩大。
为提高城市综合防灾减灾能力,地铁车站工程应具备人防功能。
本文针对地铁车站人防工程施工方案进行阐述。
二、工程概况1. 工程名称:XX地铁车站人防工程2. 工程地点:XX市XX区XX街道3. 工程规模:XX平方米4. 工程结构:地下三层,包含车站主体、设备用房、疏散通道等5. 工程内容:人防防护结构、人防通风、人防排水、人防供电等三、施工方案1. 施工准备(1)编制施工组织设计,明确施工方案、施工进度、施工质量、施工安全等。
(2)组织施工人员培训,提高施工人员技能和安全意识。
(3)落实施工材料、设备、机具等资源,确保施工顺利进行。
2. 施工工艺(1)人防防护结构施工1)根据设计图纸,进行人防防护结构施工,确保结构质量。
2)采用现浇混凝土施工,严格按照施工规范进行操作。
3)加强混凝土养护,确保混凝土强度。
(2)人防通风施工1)根据设计图纸,进行人防通风系统施工,确保通风效果。
2)采用管道焊接、通风设备安装等工艺。
3)通风系统试运行,确保通风效果符合要求。
(3)人防排水施工1)根据设计图纸,进行人防排水系统施工,确保排水畅通。
2)采用管道铺设、检查井施工等工艺。
3)排水系统试运行,确保排水效果符合要求。
(4)人防供电施工1)根据设计图纸,进行人防供电系统施工,确保供电稳定。
2)采用电缆敷设、配电箱安装等工艺。
3)供电系统试运行,确保供电效果符合要求。
3. 施工质量控制(1)严格按照设计图纸和施工规范进行施工,确保施工质量。
(2)加强施工过程监控,及时发现并解决质量问题。
(3)对施工人员进行技术交底,确保施工质量。
4. 施工安全(1)制定施工安全措施,加强施工现场安全管理。
(2)落实安全生产责任制,确保施工安全。
(3)加强施工人员安全教育培训,提高安全意识。
四、施工进度安排1. 施工准备阶段:2个月2. 人防防护结构施工阶段:3个月3. 人防通风、排水、供电施工阶段:2个月4. 竣工验收阶段:1个月五、结语本方案针对地铁车站人防工程施工,从施工准备、施工工艺、施工质量控制、施工安全等方面进行了详细阐述。
地铁人防工程方案一、前言地铁是城市重要的交通工具,是快速便捷的出行方式。
然而,由于乘客众多,地铁系统的安全问题一直备受关注。
为了确保乘客的安全,加强人防工程建设,成为了当务之急。
本文将从地下通道、紧急疏散通道、安全出口、安全岛屿等方面,系统探讨地铁人防工程的建设方案。
二、地下通道设计1. 通道宽度地铁站的地下通道是乘客行走的主要通道,通道的宽度直接影响了乘客的行走效率和安全性。
因此,地下通道的设计应当根据站点客流量和换乘需求来确定宽度,以确保乘客的顺畅和安全。
2. 通道照明地下通道的照明设计应当充分考虑到乘客的视觉舒适度和安全感。
为此,在设计中应当采用适当的照明设施、设置合理的灯光布局以及采用防眩光的设计,避免照明设施引起视觉疲劳和视力损伤。
3. 通道防火设计地下通道作为乘客生命安全的重要通道,其防火设计尤为重要。
设计应当充分考虑到通道的防火材料、防火隔离设施、通风排烟系统等,以最大限度地确保乘客在火灾发生时有足够的时间逃生,保障乘客的生命安全。
4. 安全指示标识地下通道的安全指示标识应当设置清晰、明确,以便乘客在紧急情况下能够迅速找到安全出口和疏散通道。
三、紧急疏散通道设计1. 通道宽度紧急疏散通道是在发生紧急情况时乘客疏散的主要通道,其宽度应当设计为能够容纳乘客快速疏散的宽度,以确保乘客的安全和顺利疏散。
2. 通道疏散能力紧急疏散通道应当根据站点的客流量和站台的换乘需求来确定疏散能力,以确保在紧急情况下乘客能够快速有序疏散离开站台和地下通道。
3. 通道标识紧急疏散通道的标识应当设置清晰明了,以便乘客在紧急情况下能够快速找到疏散通道,避免发生拥挤和踩踏事故。
四、安全出口设计1. 出口位置安全出口应当设置在乘客行走的主要通道上,以确保乘客在紧急情况下能够快速找到出口,并避免拥挤和混乱。
2. 出口宽度安全出口的宽度应当根据站台客流量和站台换乘需求来确定,以确保在紧急情况下乘客能够快速有序疏散离开站台。
地铁保护设计方案
地铁保护设计方案
地铁在城市交通中起着非常重要的作用,但由于其特殊的运行性质,容易遭到恶意破坏和意外事故的威胁。
为了保障地铁的安全运行,制定一套全面的地铁保护设计方案是必要的。
首先,加强地铁站内和车厢内的安保力量。
在地铁站内增加安检通道,设置安检设备来对乘客进行检查,防止携带危险物品进入地铁。
同时,在车厢内增加巡逻警察和安保人员的数量,提高地铁的安全防范意识,及时发现和阻止各类违法犯罪行为。
其次,引入智能监控技术提高地铁的安全性。
通过在地铁站和车厢内设置高清晰度监控摄像头,对乘客和乘车行为进行实时监控,可及时发现和处理安全隐患。
并且,配备智能分析系统,对监控视频进行分析,识别出异常行为和事件,及时报警并进行相应处理。
此外,加强地铁防火安全措施是地铁保护设计的重要方面。
在地铁车厢和车站内设置自动烟雾探测器和火灾报警装置,及时发现火灾隐患并进行报警和疏散。
在乘客进出口设置紧急疏散通道和应急出口,以便在火灾等突发事件中迅速疏散人员。
此外,还应经常进行消防演练和维护检查,确保地铁设施和设备的完好性和可靠性。
最后,加强与执法部门和相关部门的合作和信息交流。
地铁管理部门应与公安、消防、交通等部门建立紧密联系,加强信息
共享和联动机制,共同推进地铁的安全工作。
当发生紧急事件时,可以迅速调动各方力量,形成合力应对。
综上所述,地铁保护设计方案应包括加强安保力量、引入智能监控技术、加强地铁防火安全措施以及加强与相关部门的合作和信息交流等方面。
只有综合运用各种手段和措施,才能有效保障地铁的安全运行,为乘客提供安全、便捷的交通服务。

地铁车辆 LCU技术方案研究摘要:地铁车辆上,存在大量的机械触点、中间继电器、时间继电器,单列车辆使用继电器多达300个以上,而且大多关联到列车关键信号和逻辑,因此,采用无触点逻辑控制技术,取代继电器方案,可有效降低运营维护成本、降低车辆故障和风险,提高车辆的可靠性和检修效率,提高运营保障能力,有非常重要的作用和意义。
关键词:LCU、继电器、逻辑控制、冗余1.前言:地铁列车无触点逻辑控制单元(Logic Control Unit,简称LCU),应用新型光耦和场效应管等电路实现开关的无触点控制,并通过硬件与软件结合,完成列车控制所需的各种逻辑和延时控制功能。
2.基本原理:逻辑控制单元(LCU)取代传统的中间、时间继电器等触点元件电路,通过软件逻辑,实现直接控制和驱动地铁列车接触器和电空阀等元件,完成车辆各种控制功能,并将诊断数据、状态信息上传至列车控制系统且在HMI 上进行显示。
整个控制系统功能框图如下图所示:图1 系统原理框图2.1硬件构架机箱内部采用模块化设计,根据功能设计独立的板卡,所有板卡间通过背板内网总线进行数据交互,背板采用全PCB板设计,整机无飞线。
图2 硬件系统架构图3 功能冗余3.1电源冗余电源板承担为系统其它功能板卡提供5V 及110V 的功能,电源板本身具备输出过压保护、过载保护、短路保护等功能。
整机配置3 块电源板,每个电源板输入电压范围为43V-160V,输出恒定为5V,通过背板并联给机箱内所有功能板隔离供电,单组电源可为整机供电。
输出通道110V 电源3 组独立,任意一路110V发生故障不影响输出功能。
图3 电源并联供电3.2功能冗余LCU 采用三取二控制技术,即在输入采集、逻辑计算和输出驱动三个环节分别采用三取二控制,包含三组(以下简称A 组、B 组、C 组)功能相同的控制系统。
每组控制系统的正极线、负极线和空开等供电线路应完全独立,自主运行。
任一组LCU 供电线路的任一节点故障不影响另外两组LCU 的正常供电。
郑州地铁6号线花园口全自动无人驾驶车辆基地方案设计刘宗泽【摘要】地铁无人驾驶技术发展迅猛,为了实现地铁车辆在段场内的自动控制功能,以郑州地铁6号线花园口车辆段作为研究对象,通过对全自动无人驾驶段场在工艺布局、防护分区、无人区与有人区隔离等方面进行研究,设计了2个总平面方案并选出最佳方案,为今后全自动无人驾驶车辆段总平面设计提供借鉴.【期刊名称】《现代城市轨道交通》【年(卷),期】2018(000)002【总页数】4页(P42-45)【关键词】地铁;全自动无人驾驶;车辆基地;设计【作者】刘宗泽【作者单位】中铁第四勘察设计院集团有限公司,湖北武汉 430063【正文语种】中文【中图分类】U239.5近年地铁全自动无人驾驶技术发展迅速,国内北京地铁燕房线、上海地铁 10 号线已经运用全自动无人驾驶技术。
车辆段场是城市轨道交通系统中重要组成部分,担负全线车辆日常停放、整备、运用、检修等。
全自动无人驾驶段场应具有实现车辆自动化作业功能,包括车辆自动唤醒、自检、自动洗车及自动休眠等。
本文以郑州地铁 6 号线花园口车辆段为例,对全自动无人驾驶车辆基地总平面工艺布局进行设计及研究。
1 项目概况根据郑州市轨道交通线网规划,郑州地铁 6 号线线路全长 47.4km,预留全自动无人驾驶条件,新建 1 段 1 场,在线路北端设定修段花园口车辆段,接轨花园口东站,在线路南部设贾峪停车场(图1)。
花园口车辆段的功能定位为定修段,检修规模见表1,其大架修任务由 8 号线圃田车辆基地承担。
花园口车辆段功能及任务如下:(1)承担 6 号线部分列车的停车、列检、双周检、三月检、清扫、洗刷和定期消毒等日常维护保养工作;(2)承担 6 号线全部配属车辆的定修任务和部分配属车辆的临修任务;(3)承担 6 号线部分乘务司机换班的业务工作;(4)承担 6 号线正线事故列车的救援任务;图16 号线车辆段、场布置图表1 花园口车辆段检修规模设计年度设计值(列位)定临修近期 2远期 2远景年2双周 / 三月检近期 4远期 4远景年 4停车近期 28远期 38远景年 44(5)承担段内设备和机具维修及调机、轨道车的日常维修任务;(6)承担段内的行政管理、技术管理和材料供应、后勤等工作。
地铁门禁方案简介地铁门禁系统是为了控制和管理地铁站进出口的人员流量,确保乘客的安全和站内秩序。
本文将介绍地铁门禁方案的设计和实施,包括门禁硬件设备、软件系统以及安全措施等内容。
门禁硬件设备地铁门禁系统的核心是门禁硬件设备,包括闸机、读卡器、指纹识别器等。
这些设备负责检测乘客的身份信息,并进行相应的授权和认证。
1.闸机:闸机是地铁站进出口的物理障碍,用于控制乘客进入和离开站台。
闸机通常分为三个类型:滑门闸机、翼门闸机和三辊闸机。
它们具有快速响应、可靠性高和安全性强的特点。
2.读卡器:读卡器用于读取乘客的智能卡或二维码等信息。
读卡器可以通过接触式读卡或非接触式读卡的方式进行信息获取,确保乘客的身份准确、快速地被识别。
3.指纹识别器:指纹识别器是一种生物识别技术,可以通过扫描乘客的指纹信息进行身份验证。
指纹识别器具有高度的安全性和准确性,可有效防止冒用他人身份。
软件系统地铁门禁系统的软件系统主要包括门禁管理系统和运营监控系统。
1.门禁管理系统:门禁管理系统负责对地铁站的门禁设备进行管理和配置。
管理员可以通过该系统对乘客信息、通行权限等进行编辑和设置。
同时,门禁管理系统还可以记录并统计乘客的进出站信息,以便后续的数据分析和管理。
2.运营监控系统:运营监控系统用于对地铁站的门禁设备进行实时监控和管理。
通过该系统,操作人员可以随时监测闸机的运行状态、故障报警和设备异常等情况,及时处理并解决问题。
安全措施地铁门禁系统是保障地铁站内安全的重要手段,因此需要采取一系列的安全措施来防止安全事件的发生。
1.备份和恢复:对门禁数据进行定期备份,并建立完善的恢复机制,以确保在系统故障或数据丢失的情况下能够及时恢复。
同时,备份数据也可以用于日常的数据分析和管理。
2.安全加密:对于乘客的个人信息和通行权限等敏感数据,需要进行加密处理,确保数据的安全性和隐私保护。
3.报警系统:地铁门禁系统需要与安全监控系统和报警系统进行联动,及时发现和处理异常情况。
地铁人防工程方案设计要求随着城市化进程的加速和人口的增长,城市地铁已成为人们出行的重要交通工具。
然而,地铁作为城市重要基础设施,一旦发生安全事故将对乘客和城市交通带来严重影响。
因此,地铁人防工程方案设计显得尤为重要。
本文将针对地铁人防工程方案设计的要求进行详细阐述。
一、人防工程的基本要求1. 安全性要求人防工程的首要任务是保障乘客的人身安全。
设计人防工程时,需考虑各种可能的安全隐患,如火灾、恐怖袭击等,提出相应的安全应对措施。
2. 设备要求人防工程设备包括应急照明、逃生疏散标识、火灾报警和排烟系统等。
这些设备需具备高度可靠性,保障在突发事件中能够正常发挥作用。
3. 空气质量要求地铁车站空间封闭,对空气质量要求较高,需设计并配置适宜的通风系统,保证空气流通,降低污染物浓度。
二、设计要求1. 空间设计地铁车站、车厢等空间应尽可能按照人防工程要求进行合理设计,如采用无障碍设计,设置疏散通道等。
2. 紧急疏散设计根据地铁车站的具体情况,设计合理的紧急疏散通道和出口,并配备相应的逃生设施,以应对紧急情况。
3. 应急处理设计设计时需考虑应急情况下的处理方式,如设置应急救援设施,提供应急物资等。
4. 智能监控设计人防工程还需要配备智能监控设备,如视频监控、消防报警系统等,以实时监控车站内的情况。
5. 可持续发展设计设计要满足可持续发展的要求,包括节能、环保、资源循环利用等方面。
三、施工要求1. 严格按照规范施工人防工程设计需符合相关规范要求,施工人员应严格按照设计图纸和规范要求进行施工,确保工程质量。
2. 安全施工在施工过程中,需确保施工现场的安全防护措施齐全,保障施工人员和乘客的安全。
3. 施工质量检查施工过程中需进行质量检查,及时发现和解决施工中的质量问题。
四、验收要求1. 安全验收工程竣工后,需进行安全验收,包括逃生通道、疏散标识、消防设备等的检查,确认符合验收标准后方可投入使用。
2. 设备验收对人防工程设备进行验收,保证设备的性能和可靠性符合要求。

近年来,无人驾驶地铁在国内越来越普及,多个城市相继开通了无人驾驶地铁,可以预见无人驾驶将是地铁未来发展的趋势。
同时无人驾驶地铁的安全性也得到越来越多关注,对车辆的安全性提出了更高的要求,尤其对车辆关键设备:TCMS、BCU及牵引控制单元(DCU)提出更高的安全等级。
目前牵引控制系统中核心设备牵引控制单元安全等级仅达到SIL0,尚不能满足无人驾驶SIL2安全要求。
本文基于铁路应用安全标准EN50126、EN50128、EN50129和EN50159,通过危害性分析,得出控制系统的功能安全需求,然后详细阐述了功能安全设计和安全指标计算。
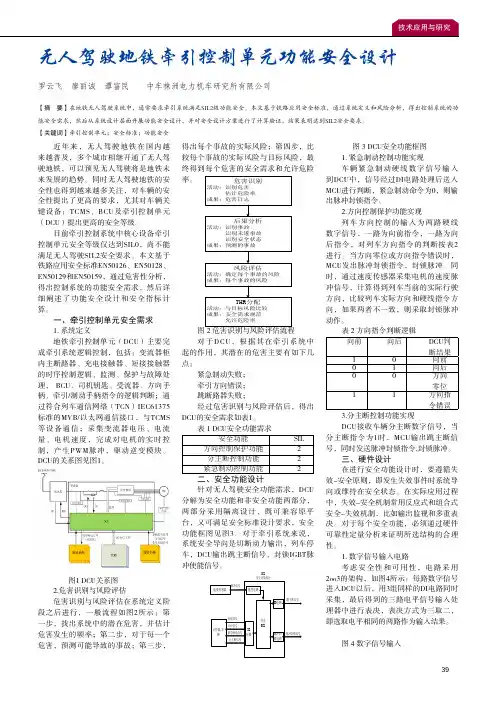
一、牵引控制单元安全需求1. 系统定义地铁牵引控制单元(DCU)主要完成牵引系统逻辑控制,包括:变流器柜内主断路器、充电接触器、短接接触器的时序控制逻辑、监测、保护与故障处理, BCU、司机钥匙、受流器、方向手柄、牵引/制动手柄指令的逻辑判断;通过符合列车通信网络(TCN)IEC61375标准的MVB/以太网通信接口,与TCMS 等设备通信;采集变流器电压、电流量、电机速度,完成对电机的实时控制,产生PWM脉冲,驱动逆变模块。
DCU的关系图见图1。
图1 DCU关系图2.危害识别与风险评估危害识别与风险评估在系统定义阶段之后进行,一般流程如图2所示:第一步,找出系统中的潜在危害,并估计危害发生的频率;第二步,对于每一个危害,预测可能导致的事故;第三步,得出每个事故的实际风险;第四步,比较每个事故的实际风险与目标风险,最终得到每个危害的安全需求和允许危险率。
对于DCU,根据其在牵引系统中起的作用,其潜在的危害主要有如下几点:紧急制动失败;牵引方向错误;跳断路器失败;经过危害识别与风险评估后,得出DCU的安全需求如表1。
表 1 DCU安全功能需求安全功能SIL方向控制保护功能2分主断控制功能2紧急制动控制功能2二、安全功能设计针对无人驾驶安全功能需求,DCU分解为安全功能和非安全功能两部分,两部分采用隔离设计,既可兼容原平台,又可满足安全标准设计要求,安全功能框图见图3。
地铁司机人为因素失误分析与预防控制研究摘要:地铁驾驶人员出现比较显著的异样问题,务必会对整个地铁的行车安全造成一定影响,对相应的安全风险进行防控工作也至关重要。
本篇文章主要对地铁驾驶人员在实际工作过程中经常会出现的各种问题进行研究与分析,并结合实际情况提出有效的管控、预防措施,以此保证地铁安全、稳定的运行,为人们提供安全的出行环境。
关键词:地铁驾驶人员;失误;安全稳定1地铁驾驶人员在实际工作中存在的失误问题以及产生的主要原因地铁驾驶人员在实际工作的过程中解释方面也存在一定的问题,经常会出现解释失误、有偏差等各种问题,从而对地铁的正常运行造成极大的影响,很容易引发事故问题。
一般情况下,导致解释问题的主要原因是由于地铁驾驶人员的技术水平较低或者是缺乏工作经验,这些问题都会对最终解释的结果造成影响。
如果驾驶人员技术水平不高、没有丰富的工作经验,会导致解释结果错误,从而引发各种错误的行为,导致地铁难以安全、稳定的运行,对人们的生命安全造成极大的威胁。
地铁驾驶人员在实际工作的过程中经常出现失误等问题,如果其不能够准确、全面的观察,就会导致判断错误,进而发出错误的指令,造成严重的安全事故问题,对人们的生命安全造成极大的影响。
根据实际情况来看,一些地铁驾驶人员存在较多的问题,在行车的过程中注意力不集中,存在侥幸等各种不良心理,对观察的质量以及效果造成严重的影响。
除此之外,地铁驾驶人员观察的质量与效果还会受到环境条件以及设备设施的影响,如果在地铁实际运行的过程中,驾驶人员使用的人机页面出现各种问题,就会导致驾驶人员无法有效的观察,导致观察的结果出现较大的偏差,对地铁安全运行造成影响,很容易出现各种事故问题。
地铁驾驶人员在实际工作中存在失误问题与计划方面也有着一定的关联。
随着经济与科技的发展,当前的地铁系统更加的智能化、自动化,对于地铁驾驶人员的依赖也越来越低,但尽管如此,对于地铁地铁驾驶人员也有着一定的要求,要求地铁驾驶人员针对实际情况进行准确、合理的规划,避免在规划的过程中出现各种问题。
地铁无人驾驶场段的全自动调车功能应用发布时间:2021-07-02T14:25:29.850Z 来源:《城市建设》2021年7月作者:王靖[导读] 随着全自动无人驾驶线路在我国多个城市的地铁线路陆续开通,全自动运行技术正在国内外城市轨道交通领域掀起一场重大变革。
自动化场段(停车场/车辆段)作为无人驾驶列车下线后进行检修、整备等作业的基地,需要建立一套与之匹配的自动化系统。
西安市城市轨道交通集团运营分公司王靖 710000摘要:随着全自动无人驾驶线路在我国多个城市的地铁线路陆续开通,全自动运行技术正在国内外城市轨道交通领域掀起一场重大变革。
自动化场段(停车场/车辆段)作为无人驾驶列车下线后进行检修、整备等作业的基地,需要建立一套与之匹配的自动化系统。
地铁场段调车是场段最重要的作业之一,为此,需在场段自动化区域内,按照国际公共交通协会(UITP)定义的GOA4等级开发一套具备较高自动化水平与安全防护能力的全自动调车系统。
本文结合成都地铁9号线的车辆基地综合自动化管理系统(MDIAS),介绍其全自动调车功能需求与实现方式。
关键词:地铁;车辆基地;自动化场段;自动调车引言虚拟现实(VirtualReality,VR)是一种可以创建和体验虚拟世界的计算机仿真系统,它利用计算机技术生成实现三维动态视景和实体行为的系统仿真,并利用多传感器、交互设备等,使用户获得沉浸式的体验。
它是融合计算机图形学、人工智能、多媒体技术等多领域最新成果的综合性信息技术。
随着人们对于外界环境的视听感知要求越来越高,虚拟现实技术已经成为目前视声领域的主流发展方向之一,而基于虚拟现实技术的电子产品已经成为工业界和产业界重点开发和推广的方向。
1自动控制及其基本原理自动控制,是利用控制装置使被控对象在没有人直接参与的情况下按照预定的规律运行和变化。
全自动无人地铁驾驶即地铁不依赖人员的控制条件下,能够自主的行驶以及确定车辆各种信息,为了能够准确的完成全自动驾驶,具有良好的自动控制系统控制质量是非常有必要的。
全自动驾驶地铁车辆车门的控制设计摘要:在技术不断进步过程中,轨道交通技术也在不断发展,促进了全自动驾驶技术的发展,并且越来越成熟。
地铁全自动驾驶指的是无人参与时列车也能够自主运行,在列车自动化驾驶过程中,要求系统满足高密度、高效率的需求,所以列车自动控制系统尤为重要。
关键词:全自动驾驶;地铁车辆;车门;控制设计引言在我国社会不断发展的过程中,也促进了城市轨道交通的发展,安全性与自动化程度不断提高,全自动运行系统(FAO)车辆为保证城市轨道交通安全、可靠、高密度运行的主要手段。
在列车安全运行的过程中,车门控制系统具有重要作用,全自动驾驶地铁对于车门控制具有较高的要求。
1地铁车辆车门系统的构成地铁车辆车门在车厢两侧设置单侧开合控制,车门处设置指示灯使乘客能够了解车门闭合动态。
地铁车辆车门系统包括电动控制装置、基础部件、承载导向装置、驱动锁闭装置、内外操作装置等,车门承载导向装置为车门闭合动力与导向装置。
电动控制装置为车门系统心脏,主要目的就是接收命令信号,从而控制车门开合。
内外操作装置是在车门自动控制失效后才能够发挥作用的车门内外紧急解锁装置,手动控制车门系统。
车门系统驱动装置为带动车门动作,并且在关闭车门后机械锁闭车门,对乘客进行保护的装置;车门基础部件能够提高车门服务质量,包括密封胶条、指示灯等。
2车门控制系统设计功能分析2.1车门控制方式选择SML16项目车辆车门控制设计了2种不同的方式,即网络控制和硬线控制,两种方式间可以自由切换。
模式的选择通过一个二位旋钮实现的,旋钮直接将模式信息通过列车线传输给各个EDCU,由各个EDCU判断接受的信号源。
这种通过旋钮选择模式的设计增加了控制方式的灵活性,司机可以随时在两种模式下自由切换,同时也减小了由于故障检修而导致列车晚点的可能性。
2.2集中开关门(1)零速信号零速信号保证了车门只能在车辆静止时才能打开,它在EDCU各信号中的优先级是最高的,即不管车辆正工作在哪一种状态中,如果此时零速信号丢失,则车门会马上关闭,从而保证了乘客的人身安全。
浅谈地铁无人驾驶信号系统与站台门接口故障分析摘要:信号系统与站台门系统的接口是地铁无人驾驶系统中的重要接口。
通过无人驾驶信号系统与站台门接口功能和电气原理,分析信号系统与站台门控制逻辑关系和站台门根据控制命令的动作时序,根据故障现象分析快速找出其产生的原因,解决站台门状态信息未反馈、现地控制盘(PSL)开关门联动按钮故障、站台门车门不联动等问题,提出故障处理的方法,为施工联调提高调试效率。
关键词:无人驾驶;信号系统;站台门;接口故障Abstract: The interface between signal system and platform door system is an important interface in the Unmanned Train Operation system.Through the interface function between the self-driving signal system and the platform door and the electrical principle, this paper analyzes the control logic relationship between the signal system and the platform door and the action sequence of the platform dooraccording to the control command, quickly finds out the cause of the fault according to the fault phenomenon analysis, solves the problems such as the non-feedback of the platform door state information, the failure of door opening and closing linkage button of the PSL, as well as the non-linkage of the platform door, and puts forward the fault handling method, thus improving the commissioning efficiency for the joint adjustment of construction.Key words:Unmanned Train Operation;Signal system; Platform door; Interface fault0 引言信号系统是地铁实现无人驾驶的关键系统,而站台门系统和信号系统的联动是地铁无人驾驶功能的重要组成部分,列车进出车站及车门与站台门联动是乘客感官最为直接的无人驾驶功能体现之一,由此对信号系统与站台门系统的接口原理分析尤为重要,从原理出发进行故障现象分析,得出故障原因,高效的故障处理,为轨道交通无人驾驶系统的安全运行提供有力保障。
交通行业无人驾驶公共交通方案第一章:项目概述 (2)1.1 项目背景 (2)1.2 项目目标 (3)1.3 项目意义 (3)第二章:无人驾驶公共交通技术概述 (3)2.1 无人驾驶技术发展历程 (3)2.2 无人驾驶公共交通系统组成 (4)2.3 无人驾驶技术在我国的应用现状 (4)第三章:无人驾驶公共交通方案设计 (5)3.1 方案总体设计 (5)3.1.1 设计目标 (5)3.1.2 设计原则 (5)3.1.3 设计内容 (5)3.2 无人驾驶车辆选型 (6)3.2.1 车辆类型 (6)3.2.2 技术参数 (6)3.2.3 车辆尺寸 (6)3.3 车辆调度与运行管理 (6)3.3.1 调度策略 (6)3.3.2 运行管理 (6)第四章:基础设施建设与改造 (7)4.1 基础设施现状分析 (7)4.2 基础设施改造方案 (7)4.3 基础设施建设规划 (7)第五章:无人驾驶公共交通安全与监管 (8)5.1 安全风险分析 (8)5.2 安全保障措施 (8)5.3 监管体系构建 (8)第六章:无人驾驶公共交通运营管理 (9)6.1 运营模式设计 (9)6.1.1 概述 (9)6.1.2 运营主体 (9)6.1.3 运营范围 (9)6.1.4 运营时间 (9)6.1.5 运营方式 (9)6.2 运营团队建设 (10)6.2.1 人员配置 (10)6.2.2 培训与考核 (10)6.2.3 激励机制 (10)6.3 运营效益分析 (10)6.3.1 经济效益 (10)6.3.2 社会效益 (10)第七章:无人驾驶公共交通政策与法规 (11)7.1 政策支持与鼓励 (11)7.1.1 国家层面政策支持 (11)7.1.2 地方政策鼓励 (11)7.1.3 政策性银行与金融机构支持 (11)7.2 法规体系构建 (11)7.2.1 制定无人驾驶公共交通法规 (11)7.2.2 完善无人驾驶公共交通相关法规 (11)7.2.3 加强国际合作与交流 (11)7.3 政策法规实施策略 (11)7.3.1 加强政策宣传与培训 (11)7.3.2 建立监管机制 (12)7.3.3 优化政策环境 (12)7.3.4 强化技术创新与人才培养 (12)第八章:无人驾驶公共交通市场推广与普及 (12)8.1 市场需求分析 (12)8.2 推广策略制定 (12)8.3 普及路径规划 (13)第九章:无人驾驶公共交通项目实施与评估 (13)9.1 项目实施步骤 (13)9.1.1 前期筹备 (13)9.1.2 项目设计 (13)9.1.3 项目实施 (14)9.1.4 项目验收与交付 (14)9.2 项目评估指标体系 (14)9.2.1 技术功能指标 (14)9.2.2 经济效益指标 (14)9.2.3 社会效益指标 (14)9.3 项目评估方法与流程 (15)9.3.1 评估方法 (15)9.3.2 评估流程 (15)第十章:无人驾驶公共交通未来发展展望 (15)10.1 技术发展趋势 (15)10.2 市场前景预测 (15)10.3 社会影响与挑战 (16)第一章:项目概述1.1 项目背景科技的飞速发展,无人驾驶技术逐渐成为交通行业的热点话题。
2018年2月 第54卷第2期 铁道通信信号 RAII WAY SIGNAl 1 ING&COMMUNICATION February 2018
Vo1.54 No.2
无人驾驶地铁人员防护开关方案研究 陈华银 杜时勇 摘 要:为实现无人驾驶地铁全自动运行区运营人员的安全防护,对无人驾驶地铁人员防护开关 使用场景、功能要求、设置原则、实现方式等进行研究,给出无人驾驶地铁人员防护开关实现 方案。 关键词:无人驾驶;地铁;信号系统;人员防护开关 Abstract:In order to realize safety protection of working staff within a fully automatic operation zone in metro,the usage scenario,function requirements,setting principle and realization way of the Staff Protection Key Switch installed in fully automatic operation metro are studied and a re— alization scheme of SPKS is given. Key words:Fully automatic operation;Metro;Signal system;SPKS DOI:10.13879/j.issnl000—7458.2018—02.17479
随着地铁无人驾驶技术的发展,越来越多的地 铁线路采用GoA4级无人驾驶标准进行建设和运 营。在运营过程中,为了对进入全自动运行区的运 营人员进行安全防护,与常规地铁线路不同,需要 把无人驾驶线路车辆段/停车场(以下简称段/场) 全自动运行区、正线全自动运行区等划分为不同的 防护区域,分别设置人员防护开关(简称SPKS), 作为对进出全自动运行区运营人员的重要防护措 施。在无人驾驶线路信号系统设计过程中,需对 SPKS使用场景、功能要求、设置原则、实现方式 等进行深人研究,结合运营规章制度,保证运营人 员在作业过程中的安全。 1人员防护开关使用场景 1.1 日检 1.运营人员应通过SPKS进人段/场全自动运 行区停车列检库、洗车库。根据运营场景,在停车 列检库内,既可采用在运转值班室与轨旁均设置 陈华银:成都轨道交通集团有限公司 高级工程师610041 成都 杜时勇:成都轨道交通集团有限公司高级工程师610041 成都 收稿日期:2017 10 20 84 SPKS的方式,也可采用由运转值班室统一设置的 方式。以下按运转值班室与轨旁均设置SPKS的方 式进行描述。 2.运营人员进入段/场全自动运行区时,由运 转值班室人员将SPKS置于防护位,检修人员通过 库前SPKS及刷门禁卡进入相应的防护区域。检修 完成后,运营人员操作库前SPKS,并到运转值班 室登记确认,值班室人员对SPKS复位。 3.当SPKS置于防护位时,信号系统防护不 允许接车或发车,控制中心相关工作站上均提醒调 度人员有人员进入SPKS防护区域,该区域是否断 电由运营决定。 1.2唤醒作业 1.每天运营前的规定时间,控制中心{J吉I度员 和车站调度员共同确认夜间施工及维护作业结束并 已清场,以相关SPKS复位完成作为正线列车唤醒 的条件之一。 2.段/场调度员确认夜间段/场的施工及维护 作业结束并已清场,同样以相关SPKS复位完成作 为段/场列车唤醒的条件之一。 3.对于未能自动唤醒需就地唤醒的列车,段/ 场调度可采用SPKS,确保司机从上车人]一唤醒到 下车出清全自动运行区过程中,列车不移动。 RAILWAY SIGNALLING&C0MMUNICAT10N Vo1.54 No.2 2018 1.3登乘作业 段/场或正线全自动运行区人工登乘巡道作业 时,司机可通过SPKS防护在全自动运行区登乘列 车。登乘完成后,由陪同司机的运营人员复位轨旁 SPKS,通知车控室或运转值班室复位相应的 SPKS,信号系统根据运行计划,自动为巡道车排 列运行进路和分配移动授权。 1.4正线轨旁作业防护 1.区间作业人员进入全自动运行区前,需在 车控室登记,车控室值班员操作SPKS开关置于防 护位,并确认该区域安全后,作业人员通过端门附 近设置的SPKS及刷门禁卡进入相应的防护区域。 人员作业时,站台值班员不能操作SPKS当作业 完成后,站台运营人员将端门附近SPKS复位并上 交站台端门门禁卡,车控室值班员操作SPKS 复位。 2.正线的SPKS开关由车站值班员统一控制 和管理,先按压车控室IBP盘相应的SPKS,再按 压站台端门附近的对应SPKS后,站台端门的门禁 才能被授权刷卡打开。 3.当工作人员进入区间上车,而不从区间回 该站时,车站值班员与相邻车站或车上工作人员确 认后,可采用安全操作复位SPKS。 4.当正线SPKS处于防护状态时,控制中心 相关调度工作站的人机界面均需提醒该区间有工作 人员作业。 1.5车辆段/停车场轨旁作业防护 1.当段/场SPKS处于防护位置时,段/场调 度员和值班员的人机界面均提醒有人员进入SPKS 防护区域,该区域是否断电由运营决定。 2.运营人员在段/场作业时,段/场值班员操 作SPKS无效。段/场作业完毕后,运营人员从出 清防护区,并按压轨旁相应的SPKS,到段/场运 转值班室上交门禁卡,并经值班员确认后,段/场 值班员才能复位SPKS。 3.运营人员进人段/场全自动运行区的SPKS 操作流程如图l所示。出全自动运行区流程逆向 即可。 4.运营人员进人段/场全自动运行区驾驶列 车至正线的操作流程如图2所示。工作人员在转换
段/场值 班员按压 室内对应 SPKS按钮 段/场值 班员再次 按压室内 对应SPKS 按钮 运营人员 按压通道 旁对应 SPKS按钮
运营人员 再次按压 通道旁对 应SPKS按 钮
运营人员 刷卡入防 护区
运营完成 后工作人 员刷卡出 防护区
图1运营人员入段/场全自动 运行区SPKS操作流程图
段/场值 班员按压 室内对应 SPKS按钮 段/场值 班员再次 按压室内 对应SPKS 按钮复位 运营人员 按压通道 旁对应 SPKS按钮
段/场值 班员通过 车上CCTV 确认工作 人员到位
运营人员 刷骨入防 护区
上车后运 营人员向 段/场值 班员报告
图2运营人员入段/场全自动 运行区驾驶列车至正线流程图
区域驾驶列车至非自动化区域与此类似。 5.运营人员驾驶列车由非全自动运行区进人 全自动运行区的操作流程如图3所示。
蓥羹 豢l l嘉蓑会炙 耋 裹!===I 厂1
轨停稳l I盖 蓑
U譬 : ̄Z蓑SPK S
运营人员 刷卡出防 护区
轨旁人员 再次按压 对应SPKS 按钮复位
图3运营人员驾驶列车由非全自动 运行区进入全自动运行区的流程图
1.6应急情况 1.区间人工救援。当信号系统车载设备、轨 旁设备、室内设备、车辆故障、列车紧急制动后, 无法自动缓解,需司机上车时,根据中心调度人 员、现地调度人员要求,由站务人员激活相应的 SPKS,并派遣司机上车进行相关操作。 2.当发现乘客在轨行区时,应激活乘客可能 经过区域的SPKS,并派遣相关人员进入轨行区进 铁道通信信号2018年第54卷第2期 行处理。 3.段/场内运行时发生车辆火灾时,列车应立 即施加常用制动停车,救援时调度员按下全场 SPKS开关,进行车辆火灾应急处理。
2人员防护开关功能要求 1.以SPKS处于非激活位置作为信号系统自 动唤醒检查条件之一。 2.正常情况下允许列车全自动驾驶进站停车, 当列车进站过程中,相应的SPKS处于激活状态, 列车将实施紧急制动。 3.授权列车在车站发车,对应SPKS未激活 作为信号系统检查条件之一;当列车启动,但尾部 仍在站台区时,如果相应的SPKS激活,列车将实 施紧急制动。 4.进路和移动授权应检查SPKS的状态和保 护区的设置。处于FAM、AM、CM模式运行的列 车在进出防护区过程中,SPKS处于防护状态,应 紧急制动停车。在FAM模式下,当SPKS恢复正 常状态、制动过程中列车已经出防护区情况下,信 号车载设备自动缓解列车,并以FAM模式继续自 动运行。 5.为减小对运营的干扰,全自动驾驶列车可 自动恢复运行,无需控制中心确认。 6.SPKS在防护位时,段/场库内对应区域的 信号机显示为禁止信号,不允许接车、发车、调 车;正线对应区域的信号机也显示为禁止信号, SPKS状态信息纳入联锁系统进路条件。 7.当正线、段/场SPKS开关激活,防护区建 立后,为方便运营维护,应允许单操该防护区内的 道岔。 8.联锁系统采集SPKS状态信息后,应分别 把状态信息传给ATS及ATP系统。根据运营需 求,信号系统可将SPKS状态信息传给门禁系统, 用于与门禁系统联锁。 9.封锁功能:①SPKS激活后应封锁相应区 域,信号系统收回或禁止发出进入该区域的移动授 权,联锁系统在ATS界面上显示相应的状态和封 锁的区域,同时通过SPKS继电器,点亮正线车站 IBP盘、段/场人员防护开关控制盘、轨旁SPKS R6 控制箱上相应的SPKS指示灯,表明该SPKS防护 区域已封锁成功;②对封锁区域已办理的进路,其 始端信号机信号立即关闭,SPKS开关复位后,进 路始端信号在检查其他条件满足时可自动开放,区 域被封锁后,不能向该区域办理进路,引导信号的 开放不检查SPKS条件。 3人员防护开关设置原则 段/场应根据运营场景,划分为全自动运行区 与非全自动运行区。全自动运行区划分为多个 SPKS防护区,每个防护分区在值班室防护开关控 制盘及库旁,均对应设置1个SPKS开关及表示 灯;段/场还应设置全场SPKS及表示灯。正线在 车控室IBP盘和每侧站台端部均设置SPKS及相应 表示灯。IBP盘上每侧站台的两端,各设置1个 SPKS及相应表示灯;正线每个站台设置4个 SPKS控制箱,安装于站台端门附近;出入段/场 线可纳入正线防护范围。 3.1段/场SPKS设置原则 咽喉区SPKS管理段/场全咽喉区的所有线路, 防护范围为从进段/场信号机处至出库信号机处。 对于多列位的停车列检库,可按不同的列位划分防 护区域,每个分区设置1个SPKS,防护范围为库 线股道至段/场的出库信号机处。以车辆段全自动 运行区SPKS防护范围划分为例,如图4所示,说 明段/场全自动运行区设置原则。 1.车辆段应按功能划分为全自动运行区与非 全自动运行区,其中全自动运行区车辆段设置安全 栅栏与非全自动运行区隔开。图4的周月检线、定 临修线、试车线经常有运营人员进行检修维护与试 车作业,且作业方式复杂,划为非全自动运行区。 2.对停车列检库每一条股道(两列位为AG、 BG)设置1个SPKS开关,划分方式也可根据运 营需求,按2个AG或2个BG分别设置1个 SPKS划分。车辆段土建设计时,在AG与BG之 间应设置地下通道,对应AG、BG分别设置门及 门禁。库内土建专业可考虑设置贯通的、与列车门 等高的作业平台。对于进入防护区的人员,需通过 运营管理手段,保证人员只能在此区域作业。 3.每个防护区均设置隔离栅栏,如果要跨越