2019/2/16 20
z变换设计法结论
采样周期 T 必须取得足够小,才能使 D(z) 接近 D(s)的性能; 双线性变换法是最好的离散化方法,它在低采 样频率下仍然保持良好的性能;
如果以增益作为唯一的准则,零极点匹配法性 能最好;
对连续传递函数Dc(s)=D1(s)D2(s)…Dn(s)可分别 对 D1(s) , D2(s) , …, Dn(s) 等 效 离 散 得 到 D1(z), D2(z), … , Dn(z),则D1(z) , D2(z) , … , Dn(z)的乘积 即为离散近似后的数字控制器D(z)。
2019/2/16
15
另:加零阶保持器的 Z 变换方法 带有零阶保持器的 Z变换方法就是将零阶保持器与模 拟控制器串联,然后对其进行 Z变换,离散化成为数字控 制器。所串接的零阶保持器是虚拟保持器,是公式中的一 个解析部分,而不是一个硬件模型。
Ts 1 e D ( z )Z [ D ( s )] s
2019/2/16 1
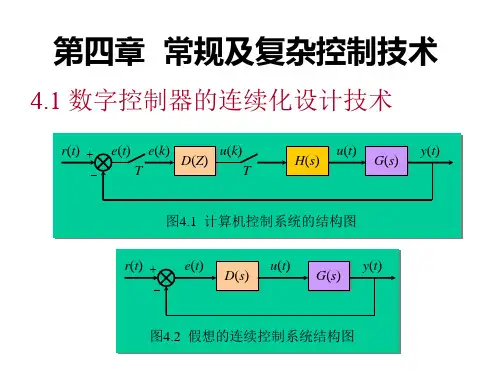
4.1 数字控制器的连续化设计技术
设计方法:忽略控制回路中所有的零阶保持器和采 样器,在S域中按连续系统进行初步设计,求出连续 控制器,然后通过某种近似,将连续控制器离散化为 数字控制器,并由计算机来实现。
4.1.1 4.1.2 4.1.3 4.1.4 数字控制器的连续化设计步骤 数字PID控制器的设计 数字PID控制器的改进 数字PID控制器的参数整定
(k 1)T kT
t
双线性变换法的数值积分等效图
2019/2/16 9
(2)前向差分法
利用级数展开可将Z=esT Z=esT=1+sT+…≈1+sT
z 1 s T
D( z) D(s)