单脉冲和差测角PPT课件
- 格式:ppt
- 大小:683.50 KB
- 文档页数:10
雷达原理大作业单脉冲自动测角的原理及应用学院:电子工程学院作者:2016年5月21日单脉冲自动测角的原理及应用一.摘要单脉冲测角法是属于振幅法测角中的等信号法中的一种,其测角精度高,抗干扰能力强,在现实中得到了广泛的应用。
而其中对于接收支路要求不太严格的双平面振幅和差式单脉冲雷达,更是备受青睐。
本文首先讲述了单平面振幅和差式单脉冲雷达自动测角的原理,再简述了双平面振幅和差式单脉冲雷达自动测角的结构框图,接着简述了本文仿真所用的一些原理和公式推导,包括天线方向图函数及其导数的推导,最后做了基于高斯形天线方向图函数的单脉冲自动测角,基于辛克函数形天线方向图函数的单脉冲自动测角,和基于高斯形天线方向图函数的双平面单脉冲自动测角。
源代码在附录里。
二.重要的符号说明三.单平面振幅和差式单脉冲自动测角原理单脉冲测角法是属于振幅法测角中的等信号法中的一种。
在单平面内,两个相同的波束部分重叠,交叠方向即为等信号轴的方向。
将这两个波束接收到的回波信号进行比较就可以在一定范围内,一定精度要求下测到目标的所在角度。
因为两个波束同时接到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲即可,所以称之为“单脉冲”。
因取出角误差的具体方式不同,单脉冲雷达种类很多,其中应用最广的是振幅和差式单脉冲雷达,其基本原理说明如下:1.角误差信号雷达天线在一个平面内有两个重叠的部分,如下图1所示:图1.振幅和差式单脉冲雷达波束图(a)两馈源形成的波束 (b)和波束 (c)差波束振幅和差式单脉冲雷达取得角误差信号基本方法是将这两个波束同时收到的信号进行和差处理,分别得到和信号和差信号。
其中差信号即为该角平面内角误差信号。
若目标处在天线轴方向(等信号轴),误差角0ε=,则两波束收到的回波信号振幅相同,差信号等于0。
目标偏离等信号轴而有一个误差角ε时,差信号输出振幅与ε成正比而其符号则由偏离方向决定。
2.和差比较器这里主要使用双T 插头,示意图如下图2(a )所示。

单脉冲比相法测角代码引言单脉冲比相法是一种常用的测角方法,用于计算目标物体相对于测量者的角度。
通过测量两个脉冲信号之间的比例,可以精确计算出目标物体的角度。
本文将介绍单脉冲比相法的原理,并编写一个示例代码来演示该测角方法的实现。
原理单脉冲比相法是基于信号处理技术的测角方法,其原理可以分为以下几步:1. 发送脉冲信号首先,测量者向目标物体发送一个脉冲信号。
该脉冲信号可以是声波、电磁波等形式的信号。
发送脉冲信号的目的是为了探测目标物体的位置和距离。
2. 接收脉冲信号目标物体接收到发送的脉冲信号后,会产生一个反射信号。
这个反射信号会被测量者接收到。
接收到的信号通常会受到一些噪声和干扰,需要进行信号处理来提取有效信息。
3. 信号预处理在进行信号处理之前,需要对接收到的信号进行预处理。
这包括滤波、放大、去噪等步骤。
信号预处理的目的是提高测量的精度和准确性。
4. 相位差测量经过信号预处理后,我们可以得到两个脉冲信号的波形。
比如,我们可以使用傅里叶变换将波形转换为频谱,然后计算两个信号频谱之间的相位差。
相位差可以用来计算目标物体的角度。
5. 计算角度通过测量的相位差,我们可以计算出目标物体相对于测量者的角度。
这通常需要一些几何和三角计算。
示例代码下面是一个使用Python编写的示例代码,演示了如何使用单脉冲比相法来测量角度:import numpy as npdef measure_angle(pulse1, pulse2):# 信号预处理pulse1_processed = preprocess_signal(pulse1)pulse2_processed = preprocess_signal(pulse2)# 相位差测量phase_diff = calculate_phase_difference(pulse1_processed, pulse2_processed)# 计算角度angle = calculate_angle(phase_diff)return angledef preprocess_signal(signal):# 信号滤波filtered_signal = filter_signal(signal)# 信号放大amplified_signal = amplify_signal(filtered_signal)# 信号去噪denoised_signal = denoise_signal(amplified_signal)return denoised_signaldef filter_signal(signal):# 使用滤波算法对信号进行滤波filtered_signal = signal# TODO: 实现滤波算法return filtered_signaldef amplify_signal(signal):# 对信号进行放大amplified_signal = signal# TODO: 实现放大算法return amplified_signaldef denoise_signal(signal):# 对信号进行去噪denoised_signal = signal# TODO: 实现去噪算法return denoised_signaldef calculate_phase_difference(signal1, signal2):# 通过傅里叶变换计算相位差fft1 = np.fft.fft(signal1)fft2 = np.fft.fft(signal2)phase_diff = np.angle(fft2 / fft1)return phase_diffdef calculate_angle(phase_diff):# 根据相位差计算角度angle = phase_diff# TODO: 实现角度计算算法return angle结论单脉冲比相法是一种常用的测角方法,可以通过测量两个脉冲信号之间的比例来计算目标物体的角度。
单脉冲测角原理单脉冲测角(Monopulse Angle Measurement)是一种常用的雷达测角方法,它通过对目标返回信号的处理,实现对目标的方位角和俯仰角的测量。
单脉冲测角原理是基于相控阵雷达技术的,它具有测量精度高、抗干扰能力强等优点,在军事和民用雷达领域得到了广泛的应用。
单脉冲测角原理的基本思想是利用相控阵天线阵列的空间波束形成特性,通过对目标返回信号的相位差进行测量,从而实现对目标方位角和俯仰角的测量。
相控阵天线阵列由多个天线单元组成,每个天线单元都可以独立控制相位和幅度,从而实现对空间波束的形成和控制。
当目标位于相控阵的波束覆盖范围内时,每个天线单元接收到的目标返回信号会存在一定的相位差,通过对这些相位差的测量和处理,就可以得到目标的方位角和俯仰角信息。
在单脉冲测角中,常用的测量方法包括相位比较法、幅度比较法和双差法。
相位比较法是通过比较不同通道接收到的信号相位差来实现测角,它的测量精度较高,但对系统的动态范围和线性度要求较高;幅度比较法是通过比较不同通道接收到的信号幅度差来实现测角,它的测量精度相对较低,但对系统的动态范围和线性度要求较低;双差法是通过比较两个天线单元之间的相位差和幅度差来实现测角,它综合了相位比较法和幅度比较法的优点,具有较高的测量精度和较低的系统要求。
单脉冲测角原理的实现需要对雷达系统进行精确的设计和调试,包括天线阵列的设计、相控阵的控制和信号处理部分的设计等。
在实际应用中,还需要考虑目标信号的特性、系统的工作环境和干扰情况等因素,从而进一步提高测量精度和抗干扰能力。
总之,单脉冲测角原理是一种重要的雷达测角方法,它通过对目标返回信号的相位差进行测量,实现对目标方位角和俯仰角的精确测量。
在现代雷达系统中得到了广泛的应用,为目标探测、跟踪和定位提供了重要的技术支持。
随着雷达技术的不断发展和完善,相信单脉冲测角原理将会发挥越来越重要的作用,为雷达应用领域带来更多的技术创新和发展。


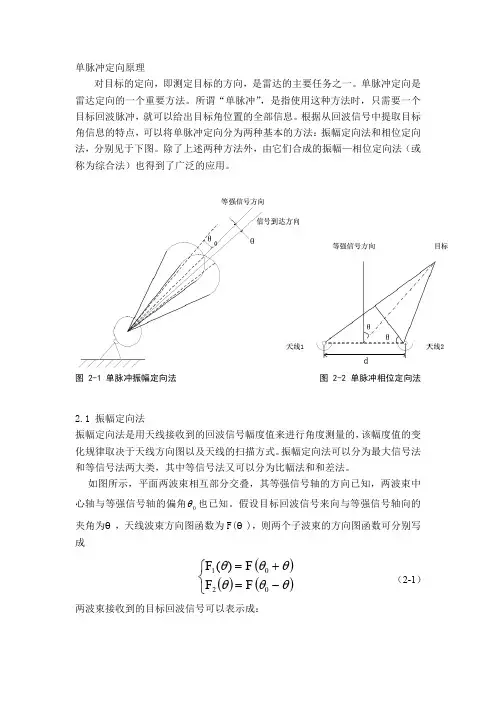
单脉冲定向原理对目标的定向,即测定目标的方向,是雷达的主要任务之一。
单脉冲定向是雷达定向的一个重要方法。
所谓“单脉冲”,是指使用这种方法时,只需要一个目标回波脉冲,就可以给出目标角位置的全部信息。
根据从回波信号中提取目标角信息的特点,可以将单脉冲定向分为两种基本的方法:振幅定向法和相位定向法,分别见于下图。
除了上述两种方法外,由它们合成的振幅—相位定向法(或称为综合法)也得到了广泛的应用。
图2-1 单脉冲振幅定向法 图2-2单脉冲相位定向法2.1 振幅定向法振幅定向法是用天线接收到的回波信号幅度值来进行角度测量的,该幅度值的变化规律取决于天线方向图以及天线的扫描方式。
振幅定向法可以分为最大信号法和等信号法两大类,其中等信号法又可以分为比幅法和和差法。
如图所示,平面两波束相互部分交叠,其等强信号轴的方向已知,两波束中心轴与等强信号轴的偏角0θ也已知。
假设目标回波信号来向与等强信号轴向的夹角为θ,天线波束方向图函数为F(θ),则两个子波束的方向图函数可分别写成()()()⎩⎨⎧-=+=θθθθθθ0201)(F F F F (2-1) 两波束接收到的目标回波信号可以表示成:()()()()()()⎩⎨⎧-==+==θθθθθθθθ022011F K F K u F K F K u a a a a (2-2) 其中a K 为回波信号的幅度系数。
对于比幅法,直接计算两回波信号的幅度比值有:()()()()θθθθθθ-+=0021F F u u (2-3) 根据上式比值的大小可以判断目标回波信号偏角θ的方向,再通过查表就可以估计出θ的大小。
对于和差法,由()θ1u 和()θ2u 可计算得到其和值()θ∑u 及差值()θ∆u 分别如下: ()()()()()()()()()()()()⎩⎨⎧--+=-=-++=+=∆∑θθθθθθθθθθθθθθ00210021F F K u u u F F K u u u a a (2-4) 其中()()()θθθθθ-++=∑00)(F F F 称为和波束方向图;()()()θθθθθ--+=∆00)(F F F 称为差波束方向图。
雷达原理大作业振幅和差单脉冲雷达在自动测角系统中的应用指导老师:魏青振幅和差脉冲测角基本原理单脉冲自动测角属于同时波瓣测角法,在一个角平面内,两个相同的波束部分重叠,交叠方向即为等信号轴的方向。
将这两个波束接收到的回波信号进行比较,就可取得目标在这个平面上的角误差信号,然后将此误差电压放大变换后加到驱动电动机控制天线向减小误差的方向运动。
因为两个波束同时接收到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲就可以确定角误差,所以叫“单脉冲”。
这种方法可以获得很高的测角精度,故精密跟踪雷达通常采用它。
由于取出角度误差信号的具体方法不同,单脉冲雷达的种类很多,应用最广的是振幅和差式单脉冲雷达,该方法的实质实际上是利用两个偏置天线方向图的和差波束。
和差脉冲法测角的基本原理为:①角误差信号。
雷达天线在一个角平面内有两个部分重叠的波束如错误!未找到引用源。
所示:振幅和差式单脉冲雷达取得角误差信号的基本方法是将这两个波束同时收到的信号进行和差处理,分别得到和信号和差信号。
与和差信号相应的和差波束如错误!未找到引用源。
(b) (c)。
振幅和差式单脉冲波束图(a)两波束;(b)和波束;(c)差波束其中差信号即为该角平面内的角误差信号。
若目标处在天线轴向方向(等信号轴),误差角为零,则两波束收到的回波信号幅度相同,差信号等于零。
目标偏离等信号轴而有一误差角时,差信号输出振幅与误差角成正比,而其符号(相位)则由偏离的方向决定。
和信号除用作目标检测和距离跟踪外,还用作角误差信号的相位基准。
②和差波束形成原理:和差比较器是单脉冲雷达的重要部件,由它完成和差处理,形成和差波束。
以错误!未找到引用源。
(a )中的双T 接头为例,它有四个端口,∑(和)端、△(差)端和1、2端,这四个端口是匹配的。
发射时,从发射机来的信号加到和差比较器的∑端,1、2端输出等幅同相信号,△端无输出,两个馈源同相激励,并辐射相同功率,结果两波束在空间各点产生的场强同相相加,形成发射和波束。
西安电子科技大学雷达大作业单脉冲雷达在测角方面的应用姓名:刘万康班级:1302031一、自动测角系统简介在火控系统中使用的雷达,必须快速连续地提供单个目标(飞机、导弹等)坐标的精确数值,此外在靶场测量、卫星跟踪、宇宙航行等方面应用时,雷达也是观测一个目标,而且必须准确地提供目标坐标的测量数据。
为了快速地提供目标的精确坐标值,要采用自动测角的方法。
自动测角时,天线能自动跟踪目标,同时将目标的坐标数据经数据传递系统送到计算机数据处理系统。
和自动测距需要有一个时间鉴别器一样,自动测角也必须要有一个角误差鉴别器。
当目标方向偏离天线轴线(即出现了误角差ε)时,就能产生误差电压。
误差电压的大小正比于误角差ε,其极性随偏离方向不同而改变。
次误差电压经跟踪系统变换、放大、处理后,控制天线向减小误差角的方向运动,使天线轴线对准目标。
用等信号法测角时,在一个角平面内需要两个波束。
这两个波束可以交替出现(顺序波瓣法),也可以同时存在(同时波瓣法)。
前一种方式以圆锥扫描雷达为典型,后一种是单脉冲雷达。
二、单脉冲雷达简介单脉冲雷达是一种精密跟踪雷达。
它每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位经行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,个波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离。
从而实现目标的测量和跟踪。
三、单脉冲雷达的自动测角系统中的优势1、角度跟踪精度与圆锥扫描雷达相比,单脉冲雷达的角度跟踪精度要高得多。
其主要原因有以下两点:第一,圆锥扫描雷达至少要经过一个圆锥扫描周期后才能获得角误差信息,在此期间,目标振幅起伏噪声也叠加在圆锥扫描调制信号(角误差信号)上形成干扰,而自动增益控制电路的带宽又不能太宽,以免将频率为圆锥扫描频率的角误差信号也平滑掉,因而不能消除目标振幅起伏噪声的影响,在锥扫频率附近一定带宽内的振幅起伏噪声可以进入角跟踪系统,引起测角误差。
单脉冲测角原理
单脉冲测角技术是一种用于雷达测向的方法,它通过测量目标返回信号的相位
差来实现高精度的测向。
在雷达系统中,测向是非常重要的,它决定了雷达系统对目标的探测和跟踪能力。
单脉冲测角技术的提出,极大地提高了雷达系统的测向精度和抗干扰能力,因此受到了广泛的关注和应用。
单脉冲测角技术的原理非常简单,它利用了雷达波束的方向特性和目标返回信
号的相位信息。
当雷达波束照射到目标时,目标会返回一个信号给雷达系统。
这个信号经过接收机接收后,会被分成两路,分别经过两个通道进行处理。
经过处理后的信号会被送入测角计算单元,通过计算两路信号的相位差,就可以得到目标的测向角度。
单脉冲测角技术的优势在于它能够实现高精度的测向,而且具有抗干扰能力强
的特点。
传统的测向方法往往受到多径效应、信号干扰等因素的影响,导致了测向精度的下降。
而单脉冲测角技术通过对相位差的精确测量,可以有效地克服这些问题,实现更加可靠和准确的测向。
此外,单脉冲测角技术还具有快速测向的特点。
传统的测向方法往往需要多次
测量才能得到准确的测向结果,而单脉冲测角技术只需要一次测量就可以得到目标的测向角度。
这不仅提高了雷达系统的响应速度,也降低了对目标的干扰,提高了雷达系统的实战能力。
综上所述,单脉冲测角技术是一种非常重要的雷达测向方法,它通过测量目标
返回信号的相位差来实现高精度、抗干扰和快速测向。
在现代雷达系统中,单脉冲测角技术已经得到了广泛的应用,并且不断得到改进和完善。
相信随着技术的进步,单脉冲测角技术将会发挥更加重要的作用,为雷达系统的性能提升和战场指挥提供更加可靠的支持。