帆板控制系统
- 格式:pdf
- 大小:332.03 KB
- 文档页数:6


简易风洞及控制系统(G题)欧阳家百(2021.03.07)摘要:本帆板控制系统由单片机ATMEGA328作为帆板转角的检测和控制核心,实现按键对风扇转速的控制、调节风力的大小、改变帆板转角θ、液晶显示等功能。
引导方式采用角度传感器感知与帆板受风力大小的转角θ的导引线。
通过PWM波控制电机风扇风力的大小使其改变帆板摆动的角度θ。
风扇控制核心采用L298电机驱动模块,用ATMEGA328单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲,实现对直流电机转速的控制,同时利用光电传感器将电机速度转化成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
MMA7455三轴加速传感器把角度输出信号传送给ATMEGA328单片机进行处理。
关键词:ATMEGA328,MMA7455,PWM波,PID算法目录1. 系统设计1.1任务与要求1.1.1主要任务1.1.2基本要求1.1.3说明1.2总体设计方案1.2.1 设计思路·1.2.2 方案论证与比较1.2.3 系统的组成2. 单元电路设计2.1 风速控制电路2.2小球测距原理2.3控制算法3. 软件设计3.1风速控制电路设计计算3.2控制算法设计与实现3.3程序流程图4. 系统测试4.1 调试使用的仪器与方法4.2 测试数据完整性4.3 测试结果分析4.4 结束语5. 总结参考文献附录1 元器件明细表附录2 电路图图纸附录3 程序清单1.系统设计1.1任务与要求1.1.1 主要任务设计制作一简易风洞及其控制系统。
风洞由圆管、连接部与直流风机构成,如图所示。
圆管竖直放置,长度约40cm,内径大于4cm且内壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运动;管体外壁应有A、B、C、D等长标志线,BC段有1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。

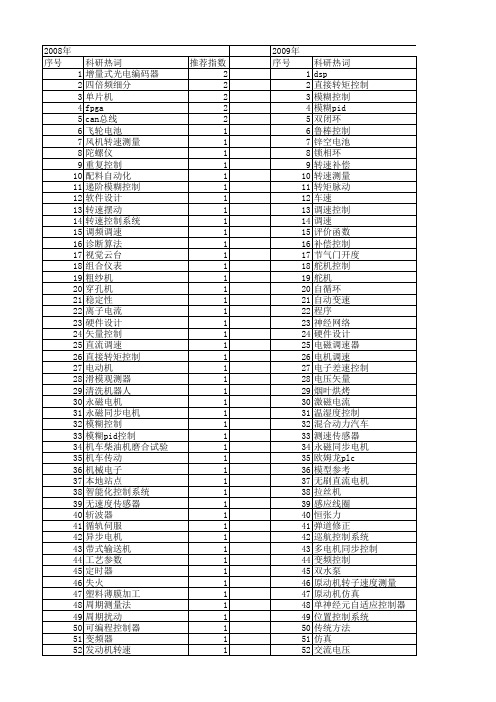
2015年全国大学生电子设计竞赛题目【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)第一届(1994年)第一届(1994年)全国大学生电子设计竞赛A.简易数控直流电源B.多路数据采集系统第二届(1995年)第二届(1995年)全国大学生电子设计竞赛A.实用低频功率放大器B.实用信号源的设计和制作C.简易无线电遥控系统D.简易电阻、电容和电感测试仪第三届(1997年)第三届(1997年)全国大学生电子设计竞赛直流稳定电源A.B.简易数字频率计C.水温控制系统D.调幅广播收音机第四届(1999年)第四届(1999年)全国大学生电子设计竞赛A.测量放大器B.数字式工频有效值多用表C.频率特性测试仪D.短波调频接收机E.数字化语音存储与回放系统第五届(2001年)第五届(2001年)全国大学生电子设计竞赛A.波形发生器B.简易数字存储示波器C.自动往返电动小汽车D.高效率音频功率放大器E.数据采集与传输系统F.调频收音机第六届(2003年)第六届(2003年)全国大学生电子设计竞赛A.电压控制LC振荡器宽带放大器B.C.低频数字式相位测量仪D.简易逻辑分析仪E.简易智能电动车F.液体点滴速度监控装置第七届(2005年)第七届(2005年)全国大学生电子设计竞赛A.正弦信号发生器B.集成运放测试仪C.简易频谱分析仪D.单工无线呼叫系统E.悬挂运动控制系统F.数控恒流源G.三相正弦波变频电源第八届(2007年)第八届(2007年)全国大学生电子设计竞赛A.音频信号分析仪B.无线识别C.数字示波器D.程控滤波器E.开关稳压电源F.电动车跷跷板积分式直流数字电压表G.H.信号发生器I.可控放大器J.电动车跷跷板第九届(2009年)第九届(2009年)全国大学生电子设计竞赛A.光伏并网发电模拟装置B.声音导引系统C.宽带直流放大器D.无线环境监测模拟装置E.电能收集充电器F.数字幅频均衡功率放大器G.低频功率放大器H.LED点阵书写显示屏I.模拟路灯控制系统第十届(2011年)A.开关电源模块并联供电系统B.基于自由摆的平板控制系统C.智能小车D. LC 谐振放大器E.简易数字信号传输性能分析仪F.帆板控制系统简易自动电阻测试仪G.H.波形采集、存储与回放系统第十一届(2013年)A.单相AC-DC变换电路B.四旋翼自主飞行器C.简易旋转倒立摆及控制装置D.射频宽带放大器E.简易频率特性测试仪F.红外光通信装置G.手写绘图板J.电磁控制运动装置K.简易照明线路探测仪L.直流稳压电源及漏电保护装置第十二届(2015年)【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)【高职高专组】LED闪光灯电源(H题)风板控制装置(I题)小球滚动控制系统(J题)获奖状况.。
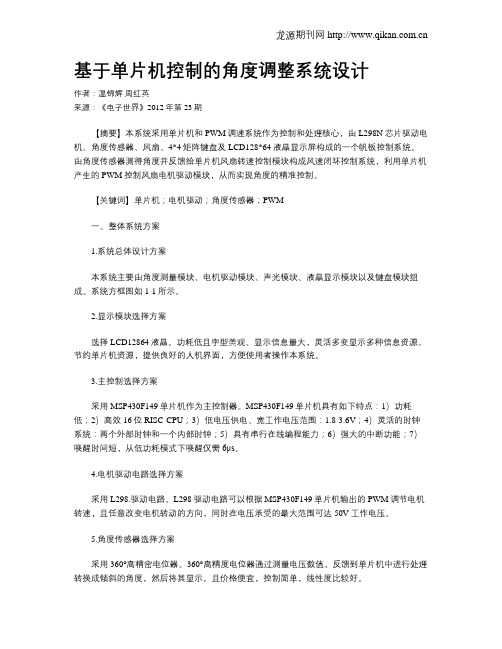
基于单片机控制的角度调整系统设计作者:温锦辉周红英来源:《电子世界》2012年第23期【摘要】本系统采用单片机和PWM调速系统作为控制和处理核心,由L298N芯片驱动电机、角度传感器、风扇、4*4矩阵键盘及LCD128*64液晶显示屏构成的一个帆板控制系统。
由角度传感器测得角度并反馈给单片机风扇转速控制模块构成风速闭环控制系统,利用单片机产生的PWM控制风扇电机驱动模块,从而实现角度的精准控制。
【关键词】单片机;电机驱动;角度传感器;PWM一、整体系统方案1.系统总体设计方案本系统主要由角度测量模块、电机驱动模块、声光模块、液晶显示模块以及键盘模块组成。
系统方框图如1-1所示。
2.显示模块选择方案选择LCD12864液晶。
功耗低且字型美观、显示信息量大,灵活多变显示多种信息资源。
节约单片机资源,提供良好的人机界面,方便使用者操作本系统。
3.主控制选择方案采用MSP430F149单片机作为主控制器。
MSP430F149单片机具有如下特点:1)功耗低;2)高效16位RISC-CPU;3)低电压供电、宽工作电压范围:1.8-3.6V;4)灵活的时钟系统:两个外部时钟和一个内部时钟;5)具有串行在线编程能力;6)强大的中断功能;7)唤醒时间短,从低功耗模式下唤醒仅需6μs。
4.电机驱动电路选择方案采用L298.驱动电路。
L298驱动电路可以根据MSP430F149单片机输出的PWM调节电机转速,且任意改变电机转动的方向,同时在电压承受的最大范围可达50V工作电压。
5.角度传感器选择方案采用360°高精密电位器。
360°高精度电位器通过测量电压数值,反馈到单片机中进行处理转换成倾斜的角度,然后将其显示。
且价格便宜,控制简单,线性度比较好。
6.风扇选择方案采用直流风扇。
小型直流风扇的风速很小,风力不集中,但启动功率不需要很大,在风速的调节上,也可用单片机输出的PWM来控制电机的转速,很容易的控制风速的调节。
基于SCA60的角度调节系统朱黎【摘要】A sailboard control system with AT89S52 single-chip as a control chip is designed and made in this paper. The power is regulated to change the revolving speed of electric motor, adjust the wind force and alter deflection angle of the sail-board. The entire system is composed of two parts: the system displays sailboard angle and the fixed sailboard angle relative to wind direction. The angle sensor in the system is used to send the collected angle voltage signal to single-chip, and the angle values are displayed on the LCD after the signal is processed by single chip. In addition, it is realized in the system that the keyboard controls the wind force and the sailboard corner.%采用AT89S52单片机作为主控芯片,设计并制作一个帆板控制系统,通过可调电源改变电机的转速,调节风力大小,改变帆板偏转角度.整个系统由帆板角度的显示和控制风力显示固定大小的角度两部分组成.该系统利用角度传感器将采集到的角度电压信号送到单片机,经过单片机处理后将角度值显示在液晶屏上.此外,该系统可以实现键盘控制风力大小和帆板转角.【期刊名称】《现代电子技术》【年(卷),期】2012(035)015【总页数】3页(P97-99)【关键词】AT89S52;角度传感器;数控电源;A/D【作者】朱黎【作者单位】陕西工业职业技术学院,陕西咸阳712000【正文语种】中文【中图分类】TN911.7-34随着电子技术的快速发展,电子技术在工业控制得到很大范围的应用,对控制的速度及精度有了更高的要求。
2011年全国大学生电子设计竞赛帆板控制系统F 题120212组2011年9月6日摘要本文主要介绍了一种帆板控制系统;通过对直流风扇风速的控制,调节风力大小,改变帆板的转角;其主控芯片为MC9S12XS128,通过PWM对电机驱动7960的控制,来调节电机的转速,同时应用光电编码器和倾角传感器作为反馈,对整个调速系统进行PID闭环调节,以到所预期的角度;并且介绍了在调试过程中的实时监控、宏观曲线分析和数据分析应用等调试手段;文章着重介绍核心器件的选择、各部分电路、软件的设计和调试手段关键词:PID调速MC9S12XS128 调试手段目录1系统方案................................................... 错误!未定义书签。
角度调整系统方案的论证与选择........................................................... 错误!未定义书签。
电机驱动方案的论证与选择................................................................. 错误!未定义书签。
MCU控制系统的论证与选择............................................................... 错误!未定义书签。
2系统理论分析与计算......................................... 错误!未定义书签。
帆板受力的分析与计算....................................................................... 错误!未定义书签。
帆板转角的原理............................................................................... 错误!未定义书签。
人造卫星太阳能帆板的结构-回复人造卫星太阳能帆板的结构是指在太空中用于收集太阳能并转化为电能的一种装置。
它由多个组件组成,包括太阳能电池板、支撑结构、电连接线路等。
首先,太阳能电池板是人造卫星太阳能帆板的核心组件。
它由多个太阳能电池片组成,每个太阳能电池片都由硅晶体制成。
太阳能电池片的工作原理是利用光照照射到硅晶体上时,光子与硅晶体中的电子发生相互作用,从而产生电流。
这些太阳能电池片被安装在一起,形成太阳能电池板的形状。
太阳能电池板通过反射和折射的方式,将太空中的太阳光能捕获并转化为电能。
为了支撑太阳能电池板,人造卫星太阳能帆板还需要有一个结构支撑系统。
这个系统通常由轻质、高强度的金属材料制成,比如铝合金或钛合金。
这些金属材料具有良好的抗压性能,能够在太空环境中承受高压力和振动。
结构支撑系统的主要作用是保持太阳能电池板的稳定性,使其能够正常工作并抵抗外部环境的影响。
此外,人造卫星太阳能帆板还需要电连接线路来将太阳能电池板产生的电能传输到卫星的其他部分。
这些电连接线路通常由导电材料制成,比如铜或铝。
电能从太阳能电池板传输到电连接线路,然后通过电线传输到卫星中的电池或其他电子设备中。
电连接线路需要具备良好的导电性能和耐高温的特性,以确保电能的传输效率和安全性。
最后,人造卫星太阳能帆板还可能包括一些辅助组件,比如温度控制系统和保护罩等。
温度控制系统用于控制太阳能电池板的工作温度,以避免过热或过冷对电池板性能的影响。
保护罩则能够保护太阳能电池板免受微陨撞击及太空尘埃的侵蚀,确保其长期稳定运行。
在人造卫星太阳能帆板的结构设计中,重点考虑了轻质、高强度和抗压的特性,以及导电性能和耐高温特性等。
这些设计考虑是为了保证太阳能电池板的工作效率和稳定性,并提高人造卫星的能源利用效率和整体性能。
随着科技的不断发展,人造卫星太阳能帆板的结构也将不断优化和改进,以满足更多的应用需求和挑战。
人造卫星太阳能帆板的结构是一个复杂而精密的工程,它的设计和制造需要精密的技术和严格的测试。
筑梦“太空之家”浩瀚的太空,再度迎来中国人逐梦苍穹的身影。
2022年11月29日,搭载神舟十五号载人飞船的长征二号F 遥十五运载火箭,在酒泉卫星发射中心点火升空,成功将航天员费俊龙、邓清明、张陆送入太空,打响了中国空间站建造阶段的收官之战。
这其中,“三舱三船”是什么样子的?神舟十五号乘组肩负着哪些使命?长征火箭安全性怎么样?让我们一起了解一下。
科学之友2023-01 12“三舱三船”很壮观神舟十五号载人飞船航天员乘组是空间站三舱组合体组装完成后第一个到访的乘组。
这是中国空间站建造阶段的最后一棒,也是空间站应用与发展阶段的第一棒,具有承前启后的重要作用。
作为空间站建造阶段的最后一次飞行任务,神舟十五号载人飞船与空间站组合体交会对接后,中国空间站首次形成了由天和核心舱、问天实验舱、梦天实验舱以及两艘载人飞船和一艘货运飞船组成的“三舱三船”组合体。
这是中国空间站目前的最大构型,总质量近百吨。
空间站“完全体”的展开,向全世界展现了中国空间站的雄姿和载人航天工程的卓越成就。
神舟十五号载人飞船、神舟十四号载人飞船两个乘组6名航天员“面对面”进行在轨交接的精彩场面,在未来还将继续上演。
航天员在轨交接将是未来中国空间站运营期间主要的任务交接模式,相较地面交接,在太空中“轮岗”更加高效可靠。
除了航天员的交接与共同工作生活之外,两艘载人飞船的“互动”也很重要。
神舟十五号载人飞船停靠于天和核心舱前向端口,神舟十四号载人飞船停靠于天和核心舱径向端口,两艘飞船同时与空间站进行信息代传、通风换热、并网供电等。
两个乘组轮换期间,空间站将通过不同的对接总线代传两船遥测,确保两艘载人飞船信息传输的唯一性和正确性。
空间站系统将同时向两艘载人飞船进行通风热支持,送风量根据两船不同的热环境进行合理分配,且可根据需求进行分档专题 13中国航天员乘组完成首次在轨交接调节。
同时,科学家针对两船同时停靠的情况,制定了协调匹配的紧急撤离策略,全力确保航天员生命安全。