Velodyne展示激光雷达突破性安防解决方案
- 格式:pdf
- 大小:155.77 KB
- 文档页数:2

Velodyne 激光雷达 产品手册01Puck(VLP-16)是 Velodyne 激光雷达中小巧而先进的一款产品。
与同等价位的传感器相比,VLP-16 性价比更高,并且保留了 Velodyne 在激光雷达方面比较有突破性的一些主要特点,如实时、360°、三维坐标和距离、附带校准的反射率测量。
VLP-16测量范围可达100m,功耗低(约8W),重量轻(约830g),体积小(Ø103mm×72mm),具备双回波性能,这些特点使它成为背包式测量、无人机挂载和其它移动设备的理想选择。
Velodyne 激光雷达“Puck”没有可见的旋转部分,使其在挑战性的环境中工作稳定 、可靠,同时具有IP67 的防护等级。
Puck LITE 版在Puck 基础上减低了自身重量(590g),专为需要更轻重量的应用场景设计,它保留了Puck 的环绕视图和一流的性能。
Puck Hi-Res 版在Puck 基础上提高了垂直角分辨率(1.33°),从而加强了地物分辨能力。
在保持Puck 的环绕视图和最佳范围的同时,该传感器提供了20°垂直视野(-10°~+10°),以实现更紧密的通道分布。
Puck(VLP-16)Puck Hi-Res Puck LITE Puck (VLP-16)性能指标Puck (VLP-16)Puck LITE Puck Hi-Res 最大测距100m 100m 100m 测距精度±3cm ±3cm ±3cm 扫描速率单回波30万点/秒双回波60万点/秒单回波30万点/秒双回波60万点/秒单回波30万点/秒双回波60万点/秒垂直视角-15°~ +15°-15°~ +15°-10°~ +10°垂直角分辨率2°2° 1.33°扫描频率 5 Hz ~20 Hz 5 Hz ~20 Hz 5 Hz ~20 Hz 安全等级一级人眼安全一级人眼安全一级人眼安全重量830g 590g 830g 功耗8W(典型)8W(典型)8W(典型)电压9V~18V 9V~18V 9V~18V 工作温度-10℃~ +60℃-10℃~ +60℃-10℃~ +60℃主要应用机器人、自动驾驶、工业、安全、无人机、测图机器人、自动驾驶、工业、安全、无人机、测图机器人、自动驾驶、工业、安全、无人机、测图产品特点_100m 测距及小巧紧凑的结构设计经验证的1级人眼安全905nm 技术一流的精确度和校准强度领先的功耗和温度范围减缓传感器间干扰特性支持二次回波模式。
一种基于激光雷达传感器的行人检测方法韩骁枫;陆建峰;李祥瑞;赵春霞【摘要】针对目前基于激光雷达点云的大多数特征不能描述行人目标的形状分布这一问题,本文提出了一种面向地面无人车辆的基于激光雷达传感器的行人检测方法.利用DBSCAN算法所有的非地面激光雷达点云进行聚类,并且提出了一种快速点特征直方图分布特征,用于训练支持向量机分类器进行行人的检测.本文在KITTI OBJECT数据库和一辆地面无人车辆上对方法的正确率和有效性进行了实验,结果表明:验证了本文提出的快速点特征直方图特征相比较于其他的激光雷达特征,可以有效提高行人检测的性能,同时能够满足地面无人车辆对行人检测的实时性要求.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2019(040)006【总页数】6页(P1149-1154)【关键词】行人检测;激光雷达;地面无人车辆;环境理解;无人驾驶;目标检测;支持向量机;快速点特征直方图【作者】韩骁枫;陆建峰;李祥瑞;赵春霞【作者单位】南京理工大学计算机科学与工程学院,江苏南京211094;南京理工大学计算机科学与工程学院,江苏南京211094;南京理工大学计算机科学与工程学院,江苏南京211094;南京理工大学计算机科学与工程学院,江苏南京211094【正文语种】中文【中图分类】O235近年来,随着地面无人车辆(unmanned ground vehicle, UGV)研究的快速发展,行人检测的相关工作正得到越来越多的重视。
传统的行人检测方法主要依赖于可见光摄像机等传感器获取的图像,采用机器视觉的相关方法进行行人检测[1-5]。
目前,研究者们已经提出了许多行人检测的方法,但是它作为地面无人车辆的核心技术之一,依然是一项十分具有挑战性的工作,其主要原因有以下2个方面:1)由于不同的行人之间的体型、姿态和着装等具有很大的差异,导致从可见光图像提取行人的特征具有一定的难度;2)可见光图像容易受到不同光照条件和阴影的影响,导致行人目标之间在图像上具有显著的差异。
激光成象雷达传感器
康峰;蔡心轸
【期刊名称】《无线电工程动态》
【年(卷),期】1990(000)002
【总页数】8页(P11-18)
【作者】康峰;蔡心轸
【作者单位】不详;不详
【正文语种】中文
【中图分类】TN958.98
【相关文献】
1.Velodyne激光雷达公司推出Puck高分辨率激光雷达传感器;更高的分辨率以辨认更远距离的物体 [J], 戴朝典
2.用于目标跟踪的雷达和成象传感器数据的融合与模拟试验 [J], Romi.,JB;焦强
3.Velabit^(TM)激光雷达传感器Velodyne激光雷达有限公司 [J],
4.Velodyne激光雷达宣布将GaN技术用于小型化低成本固态激光雷达传感器的新设计 [J], 戴朝典
5.当摄影测量遇到激光雷达:迈向机载混合时代机载摄像头和激光雷达传感器的结合推动制图领域向前迈进 [J], 台风(译)
因版权原因,仅展示原文概要,查看原文内容请购买。
Velodyne 传感器可创建360°实时环境地图,以实现自
动驾驶安全导航
据报道,Clearpath Robotics已成为Velodyne增值合作伙伴,Velodyne将为Clearpath研究型机器人平台提供其开拓性激光雷达传感器。
Clearpath Robotics总部位于加拿大,依托其移动机器人为学术和企业研究机构提供Velodyne传感器,用于勘测和检查、石油天然气、农业、材料处理及其他应用。
Clearpath的机器人解决方案采用Velodyne最先进的激光雷达技术,该技术拥有业界领先的分辨率、量程和视场角。
Velodyne传感器可创建360°实时环境地图,使机器人能够探测并避开障碍物,以实现自动驾驶安全导航。
Clearpath Robotics总经理Julian Ware表示:“Velodyne通过提供可靠、高质量的3D激光雷达,为机器人研究界做出了杰出贡献。
近十年来,我们一直在自身的机器人平台上推荐使用和整合Velodyne产品。
事实证明,Velodyne传感器可处理具有挑战性的自动化任务,并能够在不熟悉和不可预测的环境中完美地发挥作用。
”
Velodyne设计的激光雷达传感器可与机器人平台无缝整合,易于安装,功耗低且搭载Web配置工具。
它们经过精心设计,可在恶劣天气等高压力环。
一种车载激光雷达标定的方法,属于汽车自动驾驶领域。
汽车自动驾驶技术中涉及的多传感器之间的融合技术不足。
一种车载激光雷达标定的方法,设置一块标定板,配合安装在车辆上的激光雷达提取标定板的四个角点的步骤;测量四个角点在车体坐标系的物理坐标,结合由激光雷达提取的四个角点计算得到旋转平移矩阵的步骤;对两个激光雷达数据之间的进行坐标转换,拼接多台激光雷达,对激光雷达的标定的步骤。
本技术具有精确将自动驾驶车辆之间的多传感器融合的优点。
权利要求书1.一种车载激光雷达标定的方法,其特征是:所述方法包括:在自动驾驶车辆前设置一块标定板,配合安装在车辆上的激光雷达提取标定板的四个角点的步骤;测量四个角点在车体坐标系的物理坐标,结合由激光雷达提取的四个角点计算得到旋转平移矩阵的步骤;对两个激光雷达数据之间的进行坐标转换,拼接多台激光雷达,实现对激光雷达的标定的步骤。
2.根据权利要求1所述一种车载激光雷达标定的方法,其特征在于:所述的提取标定板的四个角点是指提取激光雷达数据中标定板的四个角点,具体包括以下步骤:步骤一一、获取点云数据:将标定板设置于激光雷达前方6~10m的距离处,标定板的板面垂直于地面,用于承接激光雷达的发射信号;所述的标定板为一块2米×2米的正方形木板;之后,在6~10m的距离之间选取4个距离值分别测量角点数据,得到4组角点数据;所述的角点数据是指在车体坐标系下的XYZ三维数据;步骤一二、切割标定板所在的点云区域:首先,将激光雷达向前的方向定义为X轴,将获取的点云数据记录的每个点的三维坐标表示为p(x, y, z);然后,通过下式计算每个点偏离X轴的角度α和距离激光雷达的距离d;最后,设定距离X轴的最大角度和最小角度,以及距离激光雷达前方的最大距离和最小距离,在此范围内计算包含标定板在内的点,并对该区域进行筛选,将筛选出的符合条件的点存入新的指针中;步骤一三、提取标定板:在切割后的区域内,利用PCL中的RANSAC算法,使用平面参数模型并设置迭代阀值提取标定板的平面;之后,在提取标定板后,使用参数化方程将标定板投影到其所在平面上;参数化方程为:AX+BY+CZ+D=0,式中,A、B、C表示系数,D为常数,来自RANSAC提取平面后的参数;其中,所述的RANSAC全称为Random Sample Consesus,中文含义是随机采样一致性,是利用一组包含异常数据的样本数据集计算得到数学模型参数的方法;步骤一四、提取标定板的边缘点:在上一步提取后的标定板中,计算每条横线角度差最大的两个点作为标定板的边缘点;步骤一五、计算标定板的四个角点:循环步骤一四提取标定板的边缘点的过程,再使用RANSAC算法在所有边缘点中,提取出四条直线,即标定板的四条边,并计算四条边的交点作为标定板的四个角点,并记录四个角点的坐标。

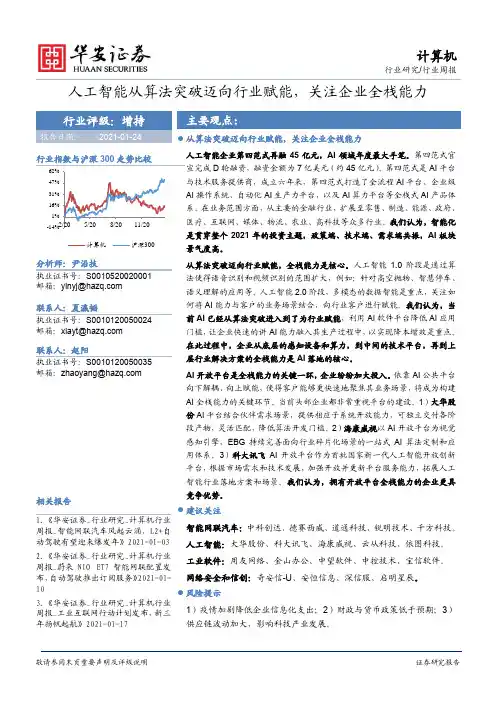
人工智能从算法突破迈向行业赋能,关注企业全栈能力行业评级:增持报告日期: 2021-01-24行业指数与沪深300走势比较[Table_Author] 分析师:尹沿技执业证书号:S0010520020001邮箱:**************联系人:夏瀛韬执业证书号:S0010120050024 邮箱:**************联系人:赵阳 执业证书号:S0010120050035 邮箱:*****************[Table_Report] 相关报告1.《华安证券_行业研究_计算机行业周报_智能网联汽车风起云涌,L2+自动驾驶有望迎来爆发年》2021-01-032.《华安证券_行业研究_计算机行业周报_蔚来NIO ET7智能网联配置发布,自动驾驶推出订阅服务》2021-01-103.《华安证券_行业研究_计算机行业周报_工业互联网行动计划发布,新三年扬帆起航》2021-01-17[Table_Summary] ⚫ 从算法突破迈向行业赋能,关注企业全栈能力人工智能企业第四范式再融45亿元,AI 领域年度最大手笔。
第四范式官宣完成D 轮融资,融资金额为7亿美元(约45亿元)。
第四范式是AI 平台与技术服务提供商,成立六年来,第四范式打造了全流程AI 平台、企业级AI 操作系统、自动化AI 生产力平台,以及AI 算力平台等全栈式AI 产品体系。
在业务范围方面,从主要的金融行业,扩展至零售、制造、能源、政府、医疗、互联网、媒体、物流、农业、高科技等众多行业。
我们认为,智能化是贯穿整个2021年的投资主题,政策端、技术端、需求端共振,AI 板块景气度高。
从算法突破迈向行业赋能,全栈能力是核心。
人工智能1.0阶段是通过算法使得语音识别和视频识别的范围扩大,例如:针对高空抛物、智慧停车、语义理解的应用等。
人工智能2.0阶段,多模态的数据智能是重点,关注如何将AI 能力与客户的业务场景结合,向行业客户进行赋能。
安防监控激光雷达在智能安防系统中的应用当人们谈论安防系统时,会想到各种摄像头、传感器和报警器等设备。
然而,随着技术的不断进步和创新,安防监控领域也迎来了一种新的利器:激光雷达。
激光雷达技术的引入,不仅弥补了传统监控系统的不足,还提供了更强大的安全保障。
本文将探讨激光雷达在智能安防系统中的应用。
首先,激光雷达技术能够帮助智能安防系统实现三维监控。
传统的监控摄像头只能提供二维图像,在遇到遮挡物时可能无法获取到完整的画面。
而激光雷达通过发射激光束,并测量激光束返回的时间和强度数据,可以实时生成三维点云地图。
这样一来,监控系统可以在遇到困难的情况下,依然准确地掌握目标物体的位置和移动轨迹,为安全防范提供了更大的便利。
其次,激光雷达还可以实现智能安防系统的目标物体识别和跟踪。
传统的监控系统往往只能提供简单的图像识别,无法进行更加复杂的目标物体分辨。
激光雷达可以通过分析三维点云数据,识别目标物体的形状、大小和运动状态等特征。
这使得智能安防系统能够更精准地判断目标物体是人还是物,并实现对其的自动跟踪。
例如,在监控大型公共场所时,系统能够准确地跟踪行走方向异常的人群,及时采取相应的防范措施。
另外,激光雷达的应用还可以提高智能安防系统的预警能力。
传统的安防系统往往依赖于摄像头的实时监控,很容易受到光照条件和遮挡物的影响,导致误报和漏报的情况。
而激光雷达可以准确测量目标物体与设备之间的距离,无论是在白天还是在夜晚,无论是在明亮的环境还是在黑暗中,都能提供可靠的数据支持。
这使得智能安防系统能够更加准确地判断目标物体的接近程度,并做出相应的报警响应。
此外,激光雷达的应用还可以提高智能安防系统的反应速度。
由于激光雷达技术可以实时获取目标物体的位置和移动轨迹,因此系统能够更快速地作出相应的响应措施。
例如,在监控系统检测到可疑行为时,可以立即通过声音、光线或电子屏幕等方式发出警示信号,吸引周围人员的注意,提高事态的应对效率。
激光雷达行业分析报告激光雷达(Lidar) 是一种利用激光进行测距、制图和检测的技术。
它正在成为许多应用中的基础,包括自动驾驶车辆、地图绘制、城市规划和防灾预警等。
本文将对激光雷达行业进行分析报告,包括定义、分类特点、产业链、发展历程、行业政策文件及其主要内容、经济环境、社会环境、技术环境、发展驱动因素、行业现状、行业痛点、行业发展建议、行业发展趋势前景、竞争格局、代表企业、产业链描述、SWTO分析、行业集中度等内容。
一、定义激光雷达是一种测量、发射、接收激光信号并计算该信号反射出的距离的技术。
它可以用于建立三维模型、用于遥感图像处理、防灾预警、自动驾驶车辆、机器人技术、安防监控等行业。
二、分类特点按工作原理分,激光雷达可以分为时间差测量型Lidar和相位差测量型Lidar。
其中,时间差测量型Lidar主要利用激光脉冲的回波时间差来确定物体的位置和距离;而相位差测量型Lidar 则利用反射激光波的相位差来完成距离测量。
按成像原理分,激光雷达可分为:扫描式Lidar和固态Lidar。
扫描式Lidar采用机械旋转扫描式或电子调制扫描式,能快速采集大量的探测数据。
固态Lidar则采用集中式、分布式或混合的激光发射和接收装置实现探测数据采集。
按应用场景分,激光雷达主要可分为:自动驾驶Lidar、遥感Lidar、安防Lidar和机器人Lidar。
三、产业链激光雷达的产业链包括:激光发射器、激光接收器、成像光学系统、光电控制系统、信号处理与算法、组装、服务等环节。
四、发展历程激光雷达技术的发展历程可以分为三个阶段。
第一阶段是1960年代后期到1980年代,激光雷达主要用于遥感、地形测量和工程控制等领域。
第二阶段是1990年代到2000年代初期,激光雷达开始被应用于机器人导航、自动驾驶、卫星地图制作和工业领域中。
第三阶段是2000年代中期至今,激光雷达的应用逐渐扩展到了城市规划、安防、防灾预警和医疗设备等新兴领域。
车载激光雷达Risley棱镜光束扫描系统曾昊旻; 李松; 张智宇; 伍煜【期刊名称】《《光学精密工程》》【年(卷),期】2019(027)007【总页数】7页(P1444-1450)【关键词】车载激光雷达; Risley棱镜; 光束扫描系统; 二维扫描【作者】曾昊旻; 李松; 张智宇; 伍煜【作者单位】武汉大学电子信息学院湖北武汉 430079【正文语种】中文【中图分类】TN958.981 引言光束扫描系统控制激光雷达的光束指向,将激光脉冲投射到周围环境中形成三维激光点云,是决定激光雷达环境感知能力的关键模块。
为实现对车辆周边的无盲区环境感知,车载激光雷达要求尽可能大的水平视场角与垂直视场角,目前主流的高端车载激光雷达均具有360°的水平视场,垂直视场角在25°~40°。
然而,常见的激光雷达扫描方式如振镜扫描、转镜扫描、声光、电光扫描等均无法实现如此大范围的二维扫描。
目前,车载激光雷达中主流的扫描方式是在垂直方向上间隔一定角度排列多个半导体激光器覆盖垂直视场,同时使激光雷达整体绕轴360°旋转以覆盖水平视场[1]。
然而,采用多个半导体激光器使得系统的装调相当复杂,且不同激光器在时间响应上存在差异,使得激光雷达不同测距通道之间存在测距互差,影响激光雷达整体的测距精度。
本文基于Risley棱镜设计的光束扫描系统只需单个激光器即可实现二维方向的扫描,在简化激光雷达系统结构的同时提升了测距精度。
Risley棱镜一般由两片或两片以上共轴楔形棱镜组成,通过控制棱镜的相对转动,Risley棱镜可以精确控制光束指向,实现大角度范围的高精度二维扫描[2-3]。
自1960年Rosell等首次提出用Risley棱镜系统实现光束扫描以来,由于具有指向精度高、响应快、结构紧凑、鲁棒性好[4-5]等特点,Risley棱镜作为光束指向器件已应用在激光通信、激光雷达、红外对抗、显微成像、军事侦察等多种领域[6-10]。
激光雷达在智能安防领域的应用方案激光雷达(Lidar)是一种通过发射激光束并测量返回的反射率来获取目标物体距离、形状和运动信息的技术。
在智能安防领域,激光雷达的应用方案十分广泛。
本文将针对智能安防领域中激光雷达的应用方案进行探讨。
首先,激光雷达可以用于视频监控系统中的行人检测。
传统的视频监控系统往往会受到光照条件、目标物体颜色以及遮挡等因素的影响,容易出现漏检和误检的情况。
而激光雷达可以通过激光束穿透遮挡物,直接获取目标物体的距离和位置信息,不受环境条件的限制,大大提高了行人检测的准确率和可靠性。
其次,激光雷达还可以应用于入侵报警系统中。
在传统的入侵报警系统中,常常采用红外、微波等技术进行目标探测,但这些技术容易受到环境因素的干扰,导致误报和漏报的情况。
而激光雷达通过精确测量目标物体与感知区域的距离,可以有效避免误报和漏报。
同时,激光雷达还可以结合图像处理技术,对目标物体进行识别和分类,进一步提高系统的准确性和实用性。
此外,激光雷达还可以应用于智能门禁系统中的人脸识别。
传统的人脸识别系统往往受到光照、角度等因素的限制,容易出现误识别的情况。
而激光雷达可以通过精确测量人脸的三维信息,并利用独特的人脸形态特征进行识别,避免了传统人脸识别系统的局限性。
激光雷达在人脸识别中的应用,不仅提高了系统的准确率,还提高了用户的使用便捷性和体验感。
此外,激光雷达还可以结合其他传感器,如红外传感器、摄像头等,构建多感知融合的智能安防系统。
通过多种传感器的数据融合,可以更全面、准确地感知周围环境,做出更精准的决策。
例如,在防火安防领域,激光雷达与红外传感器相结合,可以准确探测到火源的位置和温度,提前做出防范措施,降低火灾发生的概率和损失。
综上所述,激光雷达在智能安防领域的应用方案多种多样。
从视频监控的行人检测到入侵报警系统的目标探测,再到智能门禁系统的人脸识别,激光雷达都发挥着重要的作用。
此外,激光雷达还可以与其他传感器相结合,构建多感知融合的智能安防系统,提高整体安防效果。
点云局部特征描述综述作者:⼩⽑Date:2020-05-07来源:1.引⾔在计算机视觉发展初期,机器对客观世界的视觉感知主要依赖相机捕获的⼆维图像或图像序列。
然⽽世界在欧⽒空间内是三维的,图像因为仅仅捕捉了世界在某个视⾓下投影的信息将在对物体的尺度和⼏何属性表征上产⽣不确定性。
相⽐之下,点云(Point cloud)作为⼀种最原始的三维数据表征能够精准地反映物体的真实尺⼨和形状结构,逐渐成为了机器视觉感知所依赖的另⼀种数据形式。
图1 典型的主动式和被动式点云传感器。
(a)Velodyne 激光雷达及其扫描的点云数据,(b)ZED ⽴体视觉相机及其捕获的点云数据。
点云是⼀种由若⼲离散、⽆序、⽆拓扑结构的三维点组成的集合,通常是三维传感系统所获取数据的初始形式,具有抗光照和尺度变化等优点。
当前主流的点云数据传感器分为两类:主动式和被动式。
主动式传感器⼜可分为基于 TOF(Time of Flight)系统和三⾓测量系统两种,其中 TOF 系统通过测量所发射信号到达物体表⾯和返回接收器之间的时间间隔来确定传感器到物体表⾯的真实距离,⽽三⾓测量系统则通过两个传感器在不同地点对物体同⼀点之间的测量关系计算点的空间位置。
被动式传感器依赖图像对或图像序列并根据相机参数来从⼆维图像数据中复原出三维数据。
典型的主动式传感器包括 LiDAR(Light Detection And Ranging)、TOF 相机、结构光传感器等;典型的被动式传感器包括⽴体相机、SFM(structure from motion)系统、SFS(shape from shading)系统等。
图1展⽰了 Velodyne 激光雷达和ZED 双⽬相机以及它们捕获的点云数据。
近年来,诸如微软 Kinect、⾕歌 Tango 平板、英特尔 Real Sense 等廉价传感器的涌现使得点云数据的获取和图像⼀样便捷,进⼀步推动了三维计算机视觉技术的发展。
Velodyne展示可收集丰富感知数据的激光雷达解决
方案
据麦姆斯咨询报道,Velodyne Lidar, Inc.近日宣布,该公司用于在测试和验证中收集丰富感知数据的环绕视图激光雷达(LiDAR)解决方案——可实现360度实时感知和促进高度准确的定位和路径规划功能——将在NVIDIA DRIVE™自动驾驶平台供应。
Velodyne传感器的特性也可通过NVIDIA DRIVE Constellation™获取,后者是一个开放、可扩展的仿真平台,可实现自动驾驶车辆的大规模、位精确(bit-accurate)的硬件在环(hardware-in-the-loop)测试。
该解决方案的DRIVE Sim™软件通过模拟激光雷达及其他传感器,在虚拟世界中以高保真度重现自动驾驶汽车的输入。
Velodyne Lidar总裁兼首席商务官Mike Jellen表示:“Velodyne和英伟达(NVIDIA)在提供自动驾驶所需的高分辨率传感和高性能计算方面均处于最前沿。
作为NVIDIA DRIVE生态系统合作伙伴,我们的智能激光雷达传感器是推动全球领先制造商的汽车自动驾驶、安全和驾驶辅助系统发展的基础。
”
Velodyne提供业界最广泛的激光雷达解决方案组合,涵盖汽车原始设备制造商(OEM)、货车OEM、配送厂商和一级供应商的高级驾驶辅助和自动驾驶系统所需的完整产品系列。
经过数百万道路里程的学习证明,Velodyne。
激光雷达,为万物互联添“未来之眼”作者:暂无来源:《上海信息化》 2020年第4期文/陈俊麟物联网由感知、信息传送和信息处理三大环节组成。
在感知环节,传感器是核心技术和发展重点,没有传感器,万物互联也只是空中楼阁。
因此,突破高端传感器缺乏的瓶颈,成为我国人工智能及物联网产业发展的重要课题。
激光雷达技术诞生于国外,在研发和应用方面国外企业起步较早,在技术成熟性和产品成熟性方面相对于国内都处于领先地位。
Velodyne、Quanergy、IBEO、SICK、基恩士、倍加福等国际知名激光雷达生产厂家,在行业竞争中具有领先优势。
在国外激光雷达企业占据行业主导地位的背景下,国内激光雷达研发与制造企业也开启了快速发展的步伐。
新技术弥补市场短缺就国内传感器产业发展现状来看,虽然经过多年的发展,我国已经拥有了一批具备一定规模和技术实力的企业,也形成了一定的自主研发创新成果,但和国外技术相比,依然存在一些问题,如核心制造技术相对滞后、创新产品少等。
国内厂商生产的传感器产品,在满足人工智能、物联网产业需求方面,仍存在一定的差距。
目前,国内有几家公司的激光雷达模块已经进入市场,但是主要面对无人驾驶领域或低端应用产品领域,而在刚需巨大的高端工业市场领域,激光雷达市场尚存在一定缺口。
第21届中国国际博览会上,深圳煜炜光学科技有限公司(以下简称“煜炜光学”)针对智慧交通、空间地理信息、智能机器人、无人驾驶等领域的应用,发布了KS2100系列高端二维激光雷达扫描仪,并获得“CIIF机器人奖”。
该产品打破了国外巨头在高端激光雷达产品领域数十年的垄断态势,弥补了国内在高端激光雷达传感器方面的不足,为推动相关产业升级起到积极的促进作用。
此外,煜炜光学还打造了激光雷达传感器技术平台,建立高端激光雷达集成产品线,为产品的适配使用奠定了坚实基础。
作为激光雷达产品研发和探索的先行者,煜炜光学拥有多项激光雷达发明专利,并在测量距离、测量精度、测量速度、点云密度等关键技术指标上达到全球领先水平。
『行业要闻』Velodyne Lidar展示了先进的激光雷达技术如何改善行人安全Velodyne的新视频演示了基于激光雷达的行人自动紧急制动系统如何在各种情况下减少行人死亡, 在流感大流行期间,美国的交通流量下降,交通死亡人数却增加了.这段来自Velodyne Lidar的视频展示了Velodyne基于激光雷达的经济型行人自动紧急制动(PAEB)解决方案如何在任何条件下都能提供卓越的性能,与基于雷达+摄像头的系统相比具有决定性的优势。
加州圣何塞。
2021年3月18日)据美国国家安全委员会报道,虽然去年由于COVID-19大流行,整体驾驶里程下降了13%,但美国的机动车死亡人数却上升了8%。
Velodyne Lidar, Inc. (Nasdaq:VLDR,VLDRW)今天展示了利用激光雷达技术,行人自动紧急制动(PAEB)系统如何得到显著改善,每年有可能挽救数千人的生命。
Velodyne发布了一段新的视频,展示了其经济实惠的基于激光雷达的PAEB解决方案如何在任何条件下都能提供卓越的性能,与基于雷达+摄像头的系统相比具有决定性的优势。
美国国家公路交通安全管理局(NHTSA)报告称,80%的行人死亡事故发生在黑暗的照明条件下,这一点在夜间尤为重要。
Velodyne视频展示了惊人的测试结果,使用雷达+摄像头技术的高等级PAEB系统在所有六个夜间场景中都失败了,而Velodyne PAEB解决方案则在每一种情况下都避免了一次碰撞。
这些结果支持NHTSA和美国汽车协会(AAA)的独立测试,以确认采用雷达+摄像头技术的PAEB系统是否能充分保护黑暗条件下的行人。
Velodyne PAEB解决方案结合了名为Vella的专有软件和Velodyne的激光雷达传感器。
这些传感器可以很容易地嵌入到车辆周围的各种地方,包括挡风玻璃后面。
Vella软件对激光雷达数据进行解释,以避免和减轻与移动和静态物体的碰撞。
通过预测性碰撞监测,Vella将车辆的轨迹与其他道路使用者和物体进行比较,以识别和避免即将发生的碰撞场景。
Velodyne展示激光雷达突破性安防解决方案
据麦姆斯咨询报道,激光雷达(LiDAR)全球领导者Velodyne Lidar(以下简称Velodyne)近日在纽约无人安防博览会上展示了其最新的用于物理安全和公共安全自动化解决方案的激光雷达技术。
Velodyne的激光雷达传感器可安装在无人机系统(UAS)和无人驾驶地面车辆(UGV)中,为商业、政府和急救应用提供必要的测绘、导航和周界安全功能。
Velodyne激光雷达传感器可帮助安防和公共安全组织应对不断变化的威胁环境,保护人员和资产安全
Velodyne在展会期间展示了VLS-128激光雷达传感器,该传感器可提供业界领先的探测距离和分辨率,能够在极具挑战的环境下以无与伦比的精度探测车辆和人员。
“Velodyne能够帮助安防和公共安全组织跟上不断变化的威胁环境,保护人员和资产,”Velodyne无人机和机器人业务经理Frank Bertini 说,“我们的技术可为无人驾驶航空器和地面解决方案提供360°全景视图,可查看系统周围300米范围内的整个环境。
我们的激光雷达传感器具有多种外形尺寸,可支持各种无人机和地面应用。
”
Velodyne VLS-128激光雷达传感器。