图10内啮合不完全齿轮机构
- 格式:ppt
- 大小:4.40 MB
- 文档页数:29
在各类机械中,常需要某些构件实现周期性的运动和停歇。
能够将主动件的连续运动转换成从动件有规律的运动和停歇的机构称为间歇运动机构。
而实现间歇运动的四种常用机构分别为:棘轮机构、槽轮机构、凸轮式间歇运动机构和不完全齿轮机构。
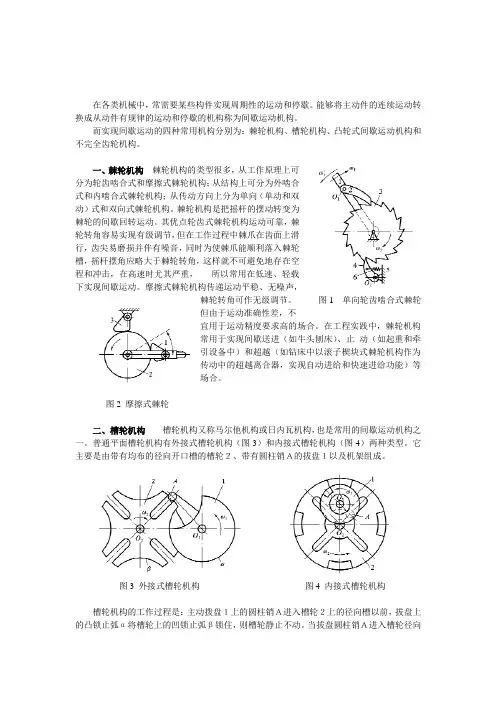
一、棘轮机构棘轮机构的类型很多,从工作原理上可分为轮齿啮合式和摩擦式棘轮机构;从结构上可分为外啮合式和内啮合式棘轮机构;从传动方向上分为单向(单动和双动)式和双向式棘轮机构。
棘轮机构是把摇杆的摆动转变为棘轮的间歇回转运动。
其优点轮齿式棘轮机构运动可靠,棘轮转角容易实现有级调节,但在工作过程中棘爪在齿面上滑行,齿尖易磨损并伴有噪音,同时为使棘爪能顺利落入棘轮槽,摇杆摆角应略大于棘轮转角,这样就不可避免地存在空程和冲击,在高速时尤其严重,所以常用在低速、轻载下实现间歇运动。
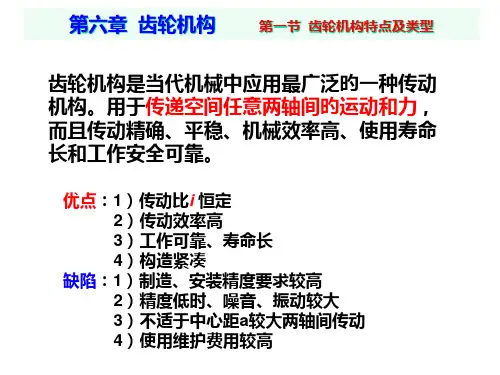
摩擦式棘轮机构传递运动平稳、无噪声,棘轮转角可作无级调节。
图1 单向轮齿啮合式棘轮但由于运动准确性差,不宜用于运动精度要求高的场合。
在工程实践中,棘轮机构常用于实现间歇送进(如牛头刨床)、止动(如起重和牵引设备中)和超越(如钻床中以滚子楔块式棘轮机构作为传动中的超越离合器,实现自动进给和快速进给功能)等场合。
图2 摩擦式棘轮二、槽轮机构槽轮机构又称马尔他机构或日内瓦机构,也是常用的间歇运动机构之一。
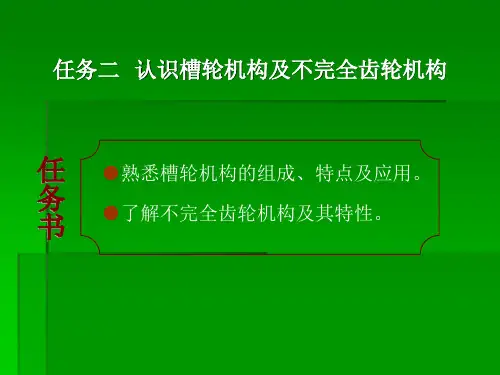
普通平面槽轮机构有外接式槽轮机构(图3)和内接式槽轮机构(图4)两种类型。
它主要是由带有均布的径向开口槽的槽轮2、带有圆柱销A的拔盘1以及机架组成。
图3 外接式槽轮机构图4 内接式槽轮机构槽轮机构的工作过程是:主动拨盘1上的圆柱销A进入槽轮2上的径向槽以前,拔盘上的凸锁止弧α将槽轮上的凹锁止弧β锁住,则槽轮静止不动。
当拔盘圆柱销A进入槽轮径向槽时,凸、凹锁止弧刚好分离,圆柱销可以驱动槽轮转动。
当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。
因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。
外接式槽轮机构的主动拨盘1与槽轮2转向相反;内接式槽轮机构的主动拨盘1与槽轮2转向相同,且传动平稳、占空间小,槽轮停歇时间较短。

齿轮机构(Gears)是现代机械中应用最广泛的一种传动机构,与其它传动机构相比,齿轮机构的优点是:结构紧凑,工作可靠,效率高,寿命长,能保证恒定的传动比,适用的范围广。
齿轮机构可以分为定传动比齿轮机构和变传动比齿轮机构。
本章仅讨论定传动比的齿轮机构。
齿轮机构的类型很多,根据其传动轴线的相对位置,它可分为三类:1、平行轴齿轮机构(Gears with Parallel Axes)两齿轮的传动轴线平行,这是一种平面齿轮机构,如表5-1所示。
它可分为:外啮合齿轮机构(有直齿轮、斜齿轮和人字齿轮传动三类)内啮合齿轮机构(有直齿轮和斜齿轮传动两类)齿轮齿条机构(有直齿条和斜齿条传动两类)点击表中图形,观察各类齿轮传动的运动特点和齿形。
表5-1 平行轴齿轮机构2、相交轴齿轮机构(Gears with Intersecting Axes)两齿轮的传动轴线相交于一点,这是一种空间齿轮机构,如表5-2所示。
它有直齿圆锥齿轮传动、斜齿圆锥齿轮传动和曲线齿圆锥齿轮传动。
表5-2 相交轴齿轮机构ff3、交错轴齿轮机构(Gears with Skew Axes)两齿轮的传动轴线为空间任意交错位置,它也是空间齿轮机构,如表5-3所示。
表5-3 交错轴齿轮机构此外,还有实现变传动比运动的非圆齿轮机构(Non-circular Gear),如下图所示。
图5-2一、斜齿圆柱齿轮齿廓曲面的形成渐开线直齿齿廓曲面的生成原理如图5-33a 所示,发生面S在基圆柱上作纯滚动时,其上与基圆柱母线平行的直线KK所展成的渐开面即为直齿轮的齿面。
(a) (b) (c)图5-33斜齿轮的齿面形成原理如图5-34a所示,发生面S 沿基圆柱纯滚动时,其上一条与基圆柱母线呈βb角的直线KK所展成的渐开螺旋面就是斜齿轮的齿廓曲面。
(a) (b) (c)图5-34一对直齿轮啮合时,齿面的接触线与齿轮的轴线平行(图5-33b),而一对斜齿轮啮合时,齿面接触线是斜直线(图5-34b),接触线先由短变长,而后又由长变短,直至脱离啮合。
5.3不完全齿轮机构不完全渐开线齿轮机构能将主动轮的等速连续转动转换为从动轮的间歇运动。
其动停时间比不受机构结构的限制,制造方便,但是从动轮在每次间歇运动的始末有剧烈冲击,故一般只用于低速,轻载及机构冲击不影响正常工作的场所。
若设置缓冲结构可改善机构的动力性能。
5.3.1基本型式与啮合特性不完全齿轮机构分外啮合与内啮合两类(图4-2-82、4-2-83)。
机构由三部分组成:主动轮1与2;一对锁止弧3,主动轮上的凸弧和从动轮上的凹弧可以直接切出或装配而成,也可单独制成一对锁止弧;缓冲结构,用以缓和或消除间歇涌动始.末时的剧烈冲击,改善机构的动力性能。
本节只讨论没有缓冲结构的运动分析与尺寸设计。
不完全齿轮的啮合特性:每一次简谐运动,可以只由一对齿啮合来完成,也可以由若干对齿来完成。
不完全齿轮机构首.末二对齿的啮合过程与完全齿轮机构不同,而中间各对齿的啮合过程与完全齿轮相同。
首对齿:从动轮所处的静止位置,应使主动轮旋转时其首齿S能顺利地通过二轮顶圆右侧交点G,从动轮具有锁止弧的齿K啮合(图4-2-84a、b)。
首啮点E由从动轮的静止位置决定,它可能位于从动轮齿顶圆弧GB1上(图b)或啮合线段B1P上(图a)。
首齿开始推动从动轮.锁止弧恰好脱开。
轮齿在GB1段啮合时,从动轮变速转动;E点离B1点越远,则开始啮合时冲击越大;齿轮在B1B2段啮合时,从动轮匀速转动。
如所选参数满足连续传动条件,则第一对齿到B2点终止啮合时,第二对齿已进入啮合。
末对齿:末对齿啮合至B2点时,因无后续齿所以并不立即脱齿,而以主动齿顶尖角与从动末齿根部啮合,经圆弧B2F,最终于二顶圆左侧交点F处分离。
在B2F段啮合过程中,从动轮角速度逐渐降低。
在F点终止啮合时,锁止弧恰好锁住,从动轮突然停止。
中间各对齿开始啮合与B1点,终止啮合于B2点。
仅由一对齿啮合来完成一次间歇运动时,啮合轨迹的前半段EB1P(或EP)与首对齿的前半段相同;后半段PB2F与末对齿的后半段相同。
不完全齿轮机构的工作原理
嘿,你问不完全齿轮机构的工作原理?这事儿咱可得好好唠唠。
不完全齿轮机构啊,那可有点神奇呢。
它就像是个有脾气的小机器,有时候转一转,有时候又停一停。
这不完全齿轮机构呢,主要是由一个不完全齿轮和一个普通齿轮组成的。
不完全齿轮呢,就是那种只有一部分有齿的齿轮。
就像一个人缺了几颗牙似的。
当不完全齿轮转动的时候,它的有齿部分会和普通齿轮的齿啮合,这样就带动普通齿轮转动啦。
就像两个人手拉手一起走一样。
但是呢,当不完全齿轮的没齿部分转过来的时候,它就和普通齿轮分开了,普通齿轮就不转了。
这时候就像是两个人松开了手,各走各的。
这样一来,不完全齿轮机构就能实现间歇运动啦。
一会儿转一会儿停,一会儿转一会儿停。
就像个调皮的孩子,一会儿跑一会儿歇着。
比如说在一些机器里面,需要某个部件一会儿动一会
儿不动,这时候不完全齿轮机构就派上用场了。
它可以控制机器的运动节奏,让机器按照特定的规律工作。
而且啊,不完全齿轮机构还可以通过调整不完全齿轮的齿数、齿形等参数来改变运动的速度和间歇的时间。
就像调闹钟一样,可以根据需要把时间调快调慢。
哎呀,不完全齿轮机构的工作原理就是这么奇妙。
它虽然看起来有点奇怪,但是在很多地方都能发挥大作用呢。
下次你看到有机器一会儿动一会儿停,说不定就是不完全齿轮机构在工作哦。
加油吧!。
机械原理论文jixieyuanlilunwen题目:不完全齿轮机构姓名:系别:2013年6月6日不完全齿轮机构摘要:生活中我们所见到的插秧机的秧箱移动机构和获取国家实用新型国家专利的高效节能的内燃机齿轮传动机构等许多机构都运用了不完全齿轮与齿条的啮合原理。
本文将对不完全齿轮与齿条的啮合特点进行简单的分析。
关键词:不完全齿轮; 齿条; 啮合一.运动分析本机构是一个内燃机齿轮传动机构,该机构传动时,运用凸轮易调节的运动特点,在活塞运动方向改变即齿轮啮合时,通过类似凸轮的结构着力,使齿轮运动带动齿条的左右移动,齿轮啮合双方速度相等、定位准确,保证了运动的可行性。
二.齿轮齿条的传动计算齿轮作回转运动,齿条作直线运动,齿条可以看作一个齿数无穷多的齿轮的一部分,这时齿轮的各圆均变为直线,作为齿廓曲线的渐开线也变为直线。
齿条直线的速度v与齿轮分度圆直径d、转速n之间的关系为v=(/)60dnmm s π式中 d ——齿轮分度圆直径,mm ;n ——齿轮转速,min r 。
其啮合线12N N 与齿轮的基圆相切1N ,由于齿条的基圆为无穷大,所以啮合线与齿条基圆的切点2N 在无穷远处。
齿轮与齿条啮合时,不论是否标准安装(齿轮与齿条标准安装即为齿轮的分度圆与齿条的分度圆相切),其啮合角'α恒等于齿轮分度圆压力角α,也等于齿条的齿形角;齿轮的节圆也恒与分度圆重合。
只是在非标准安装时,齿条的节线与分度线不再重合。
齿轮与齿条正确啮合条件是基圆齿距相等,齿条的基圆齿距是其两相邻齿廓同侧直线的垂直距离,即cos cos b P P m απα==。
齿轮与齿条的实际啮合线为12B B ,即齿条顶线及齿轮齿顶圆与啮合线12N N 的交点2B 及1B 之间的长度。
齿轮与齿条传动的尺寸计算见下表:项目名称计算公式及代号 转90︒齿轮齿条转180︒齿轮齿条数值数值齿轮齿数1z48 32模数m2mm2mm螺旋角β0︒0︒基本齿廓压力角α20︒20︒齿顶高系数*ah 1 1顶隙系数*C0.25 0.25齿轮变位系数1x0.418 0.418尺宽齿轮1b10mm10mm齿条2b30mm30mm 齿条长度L75mm300mm 主要几何参数计算项目名称计算公式及代号转齿轮齿条数值转齿轮齿条数值齿轮分度圆直径11cosd mzβ=96mm64mm齿顶高齿轮()*111a ah h x m=+ 2.836mm 2.836mm齿条*21a ah h m=2mm2mm齿根高 齿轮 **112()f a h h c x m =+- 1.664 1.664mm 齿条 **21()f a h h c m =+2.5mm 2.5mm 齿高齿轮 a fh h h =+4.5mm4.5mm齿条齿轮中心到齿条中心距 112d H x m =+4.5mm 4.5mm齿距 n p m π=6.238mm 6.238mm 齿条齿数 20.5nLz p =+1232三.此不完全齿轮机构的特点1.优点:该传动机构利用齿轮传动具有效率高、稳定性好、寿命长等的特点,替代曲柄连杆机构,将活塞的直线运动与曲轴的旋转运动相互转换。
2023年9月青少年机器人技术等级考试理论综合试卷二级真题(含答案)分数:100 题数:45一、单选题(共30题,共60分)。
1.如图,关于该机构说法正确的是()。
A.b是主动件B.这是棘轮机构C.这是槽轮机构D.这是连杆机构标准答案:A。
2.如图一辆小汽车停在陡坡上,下列哪个不是它受到的力()。
A.重力B.摩擦力C.弹力D.支持力标准答案:C。
3.智能机器人属于第几代机器人()。
A.第一代B.第二代C.第三代D.第四代标准答案:C。
4.下图中哪个是曲柄摇杆机构()。
A.aB.bC.cD.d标准答案:A。
5.如图曲柄滑块机构中哪个部分在既定的轨道上滑动()。
A.aB.bC.cD.d标准答案:C。
6.如图,鞋底有花纹是为了()。
A.更加美观B.减小摩擦C.增加摩擦防止打滑D.走路轻便标准答案:C。
7.题“公输子削木为鹊”的典故记载的是()。
A.水中机器人B.空中机器人C.陆地机器人D.水陆两栖机器人标准答案:B。
8.如图关于该机构说法正确的是()。
A.这是外啮合棘轮B.这是内啮合棘轮C.这是凸轮机构D.这是不完全齿轮机构标准答案:B。
9.如图下列哪个是单动式棘轮机构()。
A.aB.bC.cD.d标准答案:B。
10.如图,该机构中棘轮是指()。
A.aB.bC.cD.d标准答案:D。
11.如图,下列哪个凸轮机构采用了平底型从动件()。
A.aB.bC.cD.d标准答案:C。
12.如图关于反向双曲柄说法正确的是()。
A.a来回摇摆。
B.b来回摇摆。
C.a和b做回转运动,方向相反。
D.c做回转运动。
标准答案:C。
13.下图中的凸轮机构使用了摆动型从动件的是()。
A.aB.bC.cD.d标准答案:C。
14.自行车链属于哪种传动方式的一部分()。
A.齿轮传动B.链传动C.皮带平行传动D.皮带交叉传动标准答案:B。
15.如图,挖掘机的机械臂采用了哪种机构()。
A.凸轮机构B.棘轮机构C.滑轮机构D.连杆机构标准答案:D。