受轴向力下三支点梁振动计算
- 格式:docx
- 大小:814.99 KB
- 文档页数:12

三滚轴振动梁使用方法三滚轴振动梁是一种常用的实验装置,用于研究梁在振动过程中的动力学特性。
本文将介绍三滚轴振动梁的使用方法,包括梁的安装、参数的设定和实验过程的注意事项。
梁的安装是使用三滚轴振动梁进行实验的第一步。
将梁放置在水平的实验台上,并用螺栓将其固定。
梁的两端需要有足够的空间以保证振动时不受外界干扰。
在固定梁的同时,还需将三个滚轴垂直地放置在梁的下方,并与梁通过轴承相连。
确保滚轴与梁的接触处光滑,以减小能量损失。
参数的设定是进行实验的关键。
根据实验的目的和要求,需要设定梁的长度、材料、截面形状等参数。
梁的长度决定了其固有频率和振动模态的数量。
材料的选择应考虑到其弹性模量和密度等力学性质,以便准确研究梁的振动特性。
截面形状也会影响梁的振动模态和固有频率。
根据实验需求,可以调整这些参数,以获得所需的实验结果。
在进行实验过程中,还需注意一些事项。
首先,需要保证实验环境的稳定性,避免外界干扰对实验结果的影响。
其次,需要确保梁与滚轴之间的接触良好,避免能量损失。
在实验过程中,可以通过调整滚轴的位置和梁的固定方式等方法来优化接触效果。
此外,还需注意梁的初始条件的设定,如初始位移和初始速度等。
这些条件会直接影响到梁的振动特性和实验结果的准确性。
在实验过程中,还可以通过改变梁的参数和外界条件来研究不同情况下的梁振动特性。
例如,可以改变梁的长度、材料或施加外力等,以观察这些因素对梁振动的影响。
通过对比不同实验结果,可以深入理解梁的振动机理和动力学特性。
三滚轴振动梁是一种常用的实验装置,用于研究梁在振动过程中的动力学特性。
在使用三滚轴振动梁进行实验时,需要注意梁的安装、参数的设定和实验过程的注意事项。
只有在正确操作和设定的条件下,才能获得准确的实验结果,并进一步研究梁的振动特性。
通过这种实验方法,可以为工程实践提供参考,提高结构的设计和分析能力。


计算三方向地震振型因子的方法
计算三方向地震振型因子可以通过多种方法进行。
地震振型因
子是描述地震波在地下介质中传播和衰减的一个重要参数,它可以
用来研究地震波在地球内部的传播特性。
以下是一些常见的计算方法:
1. 数值模拟方法,通过使用地震波传播的数值模拟软件,如有
限差分法或有限元法等,可以模拟地震波在三个方向上的传播过程,并计算振型因子。
这种方法需要对地下介质的物理性质进行准确建模,并需要大量的计算资源。
2. 地震记录分析方法,利用地震台站记录的地震波数据,通过
分析地震波在三个方向上的传播特性,可以计算振型因子。
这种方
法需要对地震波数据进行处理和分析,包括滤波、去噪、波形拟合
等步骤。
3. 地震反演方法,利用地震波形数据进行地下介质结构的反演,可以得到地下介质的速度结构和衰减特性,从而计算振型因子。
这
种方法需要对地震波形数据进行反演处理,包括速度模型的建立、
反演算法的选择等步骤。
4. 地震波形拟合方法,通过拟合地震波形数据,可以得到地震
波在三个方向上的传播特性,从而计算振型因子。
这种方法需要对
地震波形数据进行拟合处理,包括选择合适的拟合函数、拟合参数
的确定等步骤。
综上所述,计算三方向地震振型因子的方法可以通过数值模拟、地震记录分析、地震反演和地震波形拟合等多种途径进行。
不同的
方法各有优缺点,选择合适的方法需要根据具体的研究目的和数据
条件来确定。

三点弯曲力矩公式
三点弯曲试验通常用于测试材料的弯曲强度。
在三点弯曲试验中,将一个梁状物(例如金属棒或复合材料板)放在两个支撑点上,然后在中间施加一个集中力,使梁状物发生弯曲。
三点弯曲力矩公式可以表示为:
M = F * L / 2
其中,M 表示弯曲力矩,单位为牛·米(N·m);F 表示施加的集中力,单位为牛(N);L 表示两个支撑点之间的距离,单位为米(m)。
这个公式的推导基于杠杆原理,即力矩等于力乘以力臂。
在三点弯曲试验中,集中力 F 作用在梁状物的中间,力臂为 L/2,因此弯曲力矩为 M = F * L / 2。
需要注意的是,这个公式只适用于理想情况下的三点弯曲试验,即梁状物在弯曲过程中没有发生变形或扭曲。
在实际情况下,梁状物可能会发生一定的变形,因此需要考虑材料的弹性模量等因素来修正这个公式。
1。
三滚轴振动梁使用方法三滚轴振动梁是一种常见的振动系统,其使用方法可以通过以下几个步骤来实现。
要准备好三滚轴振动梁的实验装置。
这个实验装置主要包括一个固定在支架上的梁和三个滚轴,滚轴可以在梁上自由滚动。
梁的材料可以是金属或者其他合适的材料,它的长度和截面形状也可以根据需要进行设计。
滚轴的直径和材料也需要根据实验的要求进行选择。
接下来,需要将梁和滚轴组装起来。
将梁固定在支架上,确保梁的位置稳定且与支架垂直。
然后将三个滚轴放置在梁上,使其能够自由滚动。
滚轴的位置可以根据需要进行调整,以便进行不同的振动实验。
在实验准备工作完成后,可以开始进行实验了。
首先,需要给梁施加一个初始的位移或者力,使其产生振动。
可以通过手动施加力或者使用一个外部的振动源来实现。
在施加初始位移或力之后,梁将开始自由振动,而滚轴则会在梁上进行滚动。
实验过程中,可以通过观察梁和滚轴的运动来研究振动特性。
可以测量梁的振幅、频率和相位等参数,以及滚轴的滚动速度和滚动方向。
通过这些参数的测量,可以进一步分析和理解振动梁的运动规律。
在进行实验时,需要注意一些实验技巧。
首先,要确保实验环境的稳定性,避免外界干扰对实验结果的影响。
其次,要注意实验装置的安全性,避免发生意外。
同时,要根据实验的需要,选择合适的测量和记录工具,以方便对实验数据进行分析和研究。
在实验完成后,可以对实验结果进行总结和分析。
通过对实验数据的处理,可以得到振动梁的振动特性和运动规律。
可以将实验结果与理论分析进行对比,以验证理论模型的准确性。
同时,还可以进一步探索振动梁的其他性质和应用,为相关领域的研究和应用提供参考。
总的来说,三滚轴振动梁是一种常见的振动系统,通过实验可以研究和探索其振动特性和运动规律。
通过合理的实验设计和技巧,可以得到准确可靠的实验结果,为相关领域的研究和应用提供有益的参考。
机械振动公式总结机械振动是指物体在作有规律的往复运动时所表现出的现象,它广泛应用于工程领域,例如机械工程、建筑工程、航空航天工程等。
机械振动公式是描述机械振动性质和特点的数学公式,可以用于计算、分析和预测机械振动的参数和行为。
下面是一些常见的机械振动公式的总结。
1.简谐振动公式简谐振动是指在没有外力或外力恒定时,物体的振动是以弹性势能和动能的相互转化为基础的。
简谐振动公式可以表示为:x = A sin(ωt + φ)其中,x表示位移,单位为米;A表示振幅,单位为米;ω表示角速度,单位为弧度/秒;t表示时间,单位为秒;φ表示初相位,单位为弧度。
2.弹性力系数公式弹性力系数是描述弹性材料力学性质的一个参数,也是机械振动中重要的参数之一、弹性力系数公式可以表示为:F = kx其中,F表示受力,单位为牛顿;k表示弹性力系数,单位为牛顿/米;x表示位移,单位为米。
3.自然频率公式自然频率是指物体在没有外力作用时,在固有的弹性约束条件下产生的振动频率。
自然频率公式可以表示为:f=1/(2π)*√(k/m)其中,f表示自然频率,单位为赫兹;k表示弹性力系数,单位为牛顿/米;m表示质量,单位为千克。
4.阻尼振动公式阻尼振动是指在振动过程中存在能量损失的振动,由于摩擦、空气阻力等因素的存在。
阻尼振动公式可以表示为:x = e^(-βt) * (Acos(ωdt + φ1) + Bsin(ωdt + φ2))其中,x表示位移,单位为米;β表示阻尼系数,单位为弧度/秒;ωd表示阻尼角频率,单位为弧度/秒;t表示时间,单位为秒;A、B、φ1、φ2表示振动的参数。
5.多自由度振动公式多自由度振动是指多个物体同时进行复杂的振动过程,可以通过多自由度振动公式来描述。
多自由度振动公式可以表示为:M¨+KX=0其中,M表示质量矩阵,K表示刚度矩阵,X表示位移矩阵。
通过这些机械振动公式,我们可以计算出机械系统的振幅、频率、质量、弹性力系数等参数,进而进行分析和预测。
工程力学中的振动模态和振型的计算方法在工程力学领域,振动模态和振型的分析与计算具有至关重要的意义。
它们对于结构设计、故障诊断、噪声控制等方面都发挥着关键作用。
那么,究竟什么是振动模态和振型?又有哪些有效的计算方法呢?振动模态是指结构在自由振动时的固有振动特性,包括固有频率、振型和阻尼比等。
而振型则是结构在某一固有频率下振动时各点位移的相对比值。
简单来说,振动模态反映了结构振动的“模式”,而振型则描述了这种模式下结构各部分的振动形态。
在实际工程中,计算振动模态和振型的方法有多种,下面我们来介绍几种常见的方法。
有限元法是目前应用最为广泛的一种方法。
它将连续的结构离散化为有限个单元,通过建立单元的刚度矩阵和质量矩阵,然后组装得到整个结构的总体刚度矩阵和总体质量矩阵,进而求解特征值问题得到振动模态和振型。
这种方法的优点是可以处理复杂的几何形状和边界条件,并且能够得到较为精确的结果。
但是,有限元法需要对结构进行网格划分,计算量较大,对于大型复杂结构可能需要较长的计算时间。
实验模态分析法是通过对实际结构进行实验测量来获取振动模态和振型的方法。
通常使用加速度传感器、力传感器等测量设备,对结构施加激励,然后测量结构的响应,通过信号处理和模态参数识别算法来得到模态参数。
实验模态分析法的优点是能够直接测量实际结构的振动特性,结果较为可靠。
但是,实验需要耗费较多的时间和成本,而且对于一些难以测量的结构部位可能存在困难。
传递矩阵法适用于一些具有特殊结构的系统,如轴系、梁等。
它通过将结构沿长度方向离散化为一系列单元,建立每个单元的传递矩阵,然后通过矩阵相乘得到整个结构的传递矩阵,从而求解振动模态和振型。
传递矩阵法的计算效率较高,但适用范围相对较窄。
子结构法是将复杂结构分解为若干个子结构,分别计算子结构的模态参数,然后通过综合得到整个结构的模态参数。
这种方法可以有效地降低计算规模,提高计算效率,尤其适用于大型复杂结构的分析。
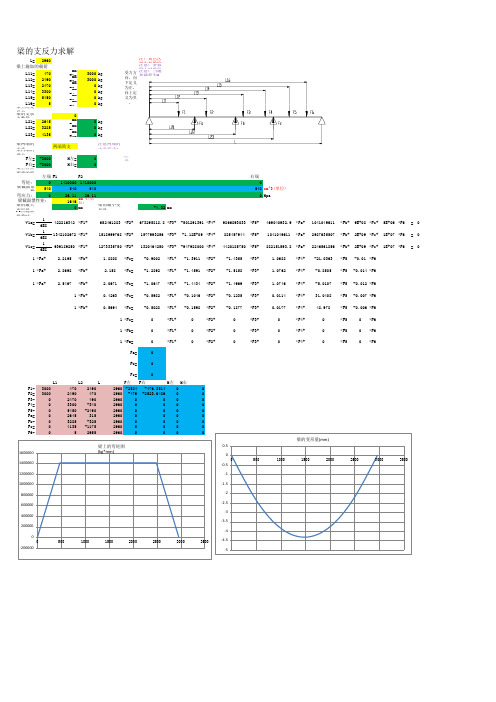
三支点梁的振动响应计算设两段梁的阵型函数分别为:Y 1(x 1)=A 1sinβx 1+B 1cosβx 1+C 1shβx 1+D 1chβx 1Y 2(x 2)=A 2sinβx 2+B 2cosβx 2+C 2shβx 2+D 2chβx 2式中, β4=ω2ρA EJ端点条件为:x 1=0,Y 1=0,∂2Y 1∂x 12 x 2=0,Y 2=0,∂2Y 2∂x 22连续条件为:x 1=L 1, x 2=L 2, Y 1=Y 2=0 ∂Y 1∂x 1=− ∂Y 2∂x 2, ∂2Y 1∂x12= ∂2Y 2∂x 22将连续条件代入阵型函数表达式中,得:A 1sinβL 1+C 1shβL 1=0 A 2sinβL 2+C 2shβL 2=0A 1cosβL 1+C 1chβL 1=− A 2cosβL 2−C 2chβL 2 −A 1sinβL 1+C 1shβL 1=−A 2sinβL 2+C 2shβL 2为使上面的齐次方程组有非零解,其系数矩阵的行列式必须等于零,即: |sinβL 1shβL 10000sinβL 2shβL 2cosβL 1chβL 1−sinβL 1shβL 1cosβL 2chβL 2sinβL 2−shβL 2|=0展开后整理得: cotβL 1+cotβL 2=cthβL 1+cthβL 2 即可解出 βr =⋯ (r =1,2,……)所以: Y 1r (x 1)=A 1r sinβr x 1+C 1r shβr x 1 Y 2r (x 2)=A 2r sinβr x 2+C 2r shβr x 2又根据 A 1sinβL 1+C 1shβL 11r =(A 1C 1)r =−shβL1sinβL 1所以振型函数为: Y 1r (x 1)=shβr x 1+ε1r sinβr x 1Y 2r (x 2)=shβr x 2+ε2r sinβr x 2 (其中令C 1=C 2=1)梁对激励f(x,t)的响应设 梁为均匀梁,ρ,A,E,J 为常数,方程为:ρA ∂2y ∂t 2+EJ ∂4y∂x 4=f(x,t) ○1 设 y (x,t )=∑Y r (x )q r (t)∞r=1 ○2 将○2式代入○1式中,两边同乘以Y s (x ),在整个区间内(0<x<L )积分,并考虑振型函数的正交性,则将原方程解耦为:q r (t )+ωr 2q r (t )=Q r (t ) (r =1,2,…)式中 Q r (t )=∫f (x,t )Y r (x )dx L0 (r =1,2,…)据杜哈梅积分公式,得:q r (t )=1ωr∫Q r (τ)t0sinωr (t −τ)dτ+q r0cosωr t +q r0ωrsinωr t将上式代入○2式中,梁的响应为: y (x,t )=∑Y r (x)[1ωr∫Q r(τ)t0sinωr (t −τ)dτ+q r0cosωr t +q r0ωrsinωr t]∞r=1其中, Y r (x )=shβr x +εr sinβr x Q r (t )=∫f (x,t )Y r (x )dx L0 q r0=∫ρAf(x)L 0Y r (x )dx q r0=∫ρAg(x)L 0Y r (x )dx 式中,f(x)是初始坐标,g(x)是初始速度AUG 23 2011Matlab 画出的数值解振形: Ansys 仿真振形:AUG 23 2011AUG 23 2011AUG 23 2011AUG 23 2011在轴向力作用下三支点梁的横向振动响应(代力法)将中间的支撑去掉, 代之以约束反力r(t), 这样连续梁变为简支梁。
在轴向压力P 作用下,简支梁的横向振动微分方程为:EI∂4y ∂4x+P∂2y ∂2x+ρA∂2y ∂2t=r (t )δ(x −L 1) (1)其中:EI ——抗弯刚度, P ——轴向压力, ρ——梁的密度, A ——梁的截面积,r(t)——中间点对梁的反力, δ(x −L 1) ——δ函数。
边界条件, x =0, y =0,∂2y ∂2x =0 (2) x =L, y =0,∂2y ∂2x=0 (3)x =L 1, y =0 (4)因为中间支座反力随时间的变化规律与梁的自由振动规律一致,于是令,y (x,t )=Y (x )sin (ωt +φ),r (t )=Rsin (ωt +φ)将上式带入(1)~(4)中,得到,Y (4)(x )+α2Y (2)(x )−k 4Y (x )=R EIδ(x −L 1) (5)Y (0)=Y (L )=0,Y (2)(0)=Y (2)(L )=0 (6) Y (L 1)=0 (7) 其中,α2=PEI , k 4=ρAω2EI对式子(5)进行拉普拉斯变换,得到s 4L (Y )−s 3Y (0)−s 2Y ′(0)−sY (2)(0)−Y (3)(0)+ α2[s 2L (Y )−sY (0)−Y ′(0)]−k 4L (Y )=R EIe −sL 1 整理得,⇒其中, λ1=√α22+√k 4+α44λ1=√α22−√k 4+α44λ12=λ22+α2对式子(8)进行拉普拉斯逆变换,并整理得,Y (x )=D 1sinλ1x +D 2cosλ1x +D 3shλ2x +D 4chλ2x +R2EI [shλ2(x−L 1)λ23−sinλ1(x−L 1)λ13]∙u(x −L 1) (9)其中,D 1、D 2、D 3、D 4为待定系数,由边界条件确定,u(x −L 1)是单位阶跃函数将式子(9)带入边界条件(2)~(4), 可以得到, D 2=D 4=0D 1sinλ1L +D 3shλ2L =R 2EI[sinλ1(L−L 1)λ13−shλ2(L−L 1)λ23]D 1λ12sinλ1L −D 3λ22shλ2L =R2EI [sinλ1(L−L 1)λ1+shλ2(L−L 1)λ2]D 1=R 2EI∙sinλ1(L−L 1)λ13sinλ1LD 3=R 2EI ∙shλ2(L−L 1)λ23shλ2L所以,振形函数为Y (x )=R 2EI{sinλ1(L−L 1)λ13sinλ1Lsinλ1x −shλ2(L−L 1)λ23shλ2Lshλ2x +[shλ2(x−L 1)λ23−sinλ1(x−L 1)λ13]∙u (x −L 1)} (10)将式子(10)带入式(7)中,得:+R 2EI [sinλ1(L −L 1)λ13sinλ1L sinλ1L 1−shλ2(L −L 1)λ23shλ2L shλ2L 1]=0即,sinλ1(L−L 1)λ13sinλ1Lsinλ1L 1−shλ2(L−L 1)λ23shλ2Lshλ2L 1 λ12=λ22+α由式子(11)可以解出λ1,从而解出k ,再解出固有频率ω。
在轴向力作用下三支点梁的横向振动响应(分段法)考虑轴向力的微分方程:EI ∂4y ∂x 4+P ∂2y ∂x 4+ρA ∂2y∂t2=0设两段梁的阵型函数分别为:Y 1(x 1)=A 1sinβ1x 1+B 1cosβ1x 1+C 1shβ2x 1+D 1chβ2x 1Y 2(x 2)=A 2sinβ1x 2+B 2cosβ1x 2+C 2shβ2x 2+D 2chβ2x 2式中,α=√PEIβ1=√α22+√α44+k 4,β2=√−α22+√α44+k 4 , k4=ω2ρAEI端点条件为: X 1=0,Y 1=0,∂2Y 1∂x 12=0 B 1+D 1=0 (1)−B 1β12+D 1β22=0 (2) A 2sinβ1L 2+B 2cosβ1L 2+C 2shβ2L 2+D 2chβ2L 2=0 (3)X 2=L 2,Y 1=0,∂2Y 2∂x 22=0 −A 2β12sinβ1L 2−B 2β12cosβ1L 2+C 2β22shβ2L 2+D 2β22chβ2L 2=0 (4)连续条件为:x 1=L 1,x 2=1sinβ1L 1+B 1cosβ1L 1+C 1shβ2L 1+D 1chβ2L 1=0 (5) Y 1=Y 2=0, 2+D 2=0 (6) ∂Y 1∂x 1=− ∂Y2∂x 2, 1β1cosβ1L 1−B 1β1sinβ1L 1+C 1β2chβ2L 1+D 1β2shβ2L 1=A 2β1+C 2β2 (7) ∂2Y 1∂x12= ∂2Y 2∂x 22, 1β12sinβ1L 1−B 1β12cosβ1L 1+C 1β22shβ2L 1+D 1β22chβ2L 1=0 (8)由(1)~(8)推得:A 1=−shβ2L 1∙secβ1L 1∙C 1,B 1=0,C 1=C 1,D 1=0A 2=shβ2L 1∙cotβ1L 2∙C 1,B =−shβL ∙C ,⇒(1)~(8)所组成的方程组的系数矩阵为:0 1 0 1 0 0 0 00 −β120 β220 0 0 00 0 0 0 sinβ1L2cosβ1L2sinhβ2L2coshβ2L20 0 0 0 −β12sinβ1L2−β12cosβ1L2β22sinhβ2L2β22coshβ2L2sinβ1L1cosβ1L1sinhβ2L1coshβ2L10 0 0 00 0 0 0 0 1 0 1β1cosβ1L1−β1sinβ1L1β2coshβ2L1β2sinhβ2L1−β10 −β20 −β12sinβ1L1−β12cosβ1L1β22sinhβ2L1β22coshβ2L10 β120 −β22为使上面的齐次方程组有非零解,其系数矩阵的行列式必须等于零,即: |A|=0即可解出β1r=⋯ (r=1,2,……)所以:Y1r(x1)=A1sinβ1r x1+B1cosβ1r x1+C1shβ2r x1+D1chβ2r x1Y2r(x2)=A2sinβ1r x2+B2cosβ1r x2+C2shβ2r x2+D2chβ2r x2XY ZAUG 25 2011XZAUG 25 2011XY ZAUG 25 2011XY ZAUG 25 2011XY ZAUG 25 2011XY ZXZXY ZXY ZXXY ZXZXY ZXY ZX用分段法和Ansys求解三支点梁在各种轴向载荷下的结果用代力法和Ansys求解三支点梁在各种轴向载荷下的结果。