近场声全息方法识别噪声源的实验研究
- 格式:pdf
- 大小:326.73 KB
- 文档页数:5
近水面目标主要声源识别声全息技术研究的开题报告一、研究背景及意义水下声学技术在海洋勘探、海底资源开发、军事防卫、环境监测等领域有着广泛的应用。
近年来,随着中国海洋发展战略的加快实施,海洋工程建设不断加快,水下声学技术也得到了更加重视。
在水下声学技术中,声全息技术是一种常用的声学信号处理方法。
声全息技术可以通过计算声波在媒介中的传播路径和影响因素,重构出声场的三维分布情况,获得目标的位置、形状、声学参数等特征信息。
本课题的研究目的是针对近水面目标的声源识别问题,研究声全息技术在该场景下的应用,实现对目标的快速准确识别,为我国海洋工程和国防事业做出贡献。
二、研究内容及方法本课题将对近水面的声源进行识别,主要内容包括以下几个方面:1. 建立水下声学信号处理模型。
通过研究声波在水下传播的规律及影响因素,建立声场分布模型,解析信号的特征参数。
2. 分析声波信号的特征参数。
通过对声波信号的频谱、波形、时延等参数进行分析,获得目标声源的特征信息。
3. 确定目标的声学特征参数。
通过对目标的材料、形状等因素进行分析,确定目标的声学特征参数。
4. 基于声全息技术的目标识别方法。
利用声全息技术对声场进行重构,获取目标的位置、形状和声学特性等信息,从而实现对其的识别。
在研究方法上,本课题将采用理论分析法和数值模拟法相结合,通过实验测试数据对方法进行验证,并进行性能评估。
三、预期成果本课题的预期成果包括:1. 完成近水面目标声源识别的理论框架和方法研究。
2. 完成声波信号处理的相关方法和算法研究。
3. 建立近水面目标声学特征参数库。
4. 设计并实现基于声全息技术的声源识别方法。
5. 进行仿真试验和实验验证,评估声源识别方法的性能和准确性。
四、研究范围和局限性本课题主要研究针对近水面目标的声全息技术声源识别方法。
但是,受限于当前声学传感器的检测能力、噪声干扰等因素,实际应用效果可能存在一定误差。
因此,需要进一步扩充数据量,优化算法模型,提高识别精度和可靠性。
基于矢量阵近场声全息技术的噪声源识别方法研究的开题报告一、研究背景随着城市化进程的加快和工业化发展的不断推进,噪声污染已成为困扰人们健康生活的重要问题,也是环境保护工作中亟待解决的难点之一。
为了减少噪声污染对生态环境、社会和人类健康的影响,需要对噪声源进行有效识别和监控。
由于现有的噪声源识别方法往往需要在靠近噪声源处进行测量,并且需要考虑噪声源和接收器之间的复杂相互关系,因此其适用范围有限,难以在大范围内实现噪声源的准确识别。
因此,新的噪声源识别技术的研发亟待开展。
近年来,矢量阵近场声全息技术逐渐被广泛应用于噪声源定位、识别等领域,其基本原理是通过在噪声源周围布置一组阵列式的传感器,捕捉到噪声源辐射的声波信号,并通过对信号进行处理,实现对噪声源位置、类型等信息的识别。
然而,现有的矢量阵近场声全息技术仍存在一些问题,如精度不高、复杂性较高等,因此需要进一步研究和改进。
本文旨在研究基于矢量阵近场声全息技术的噪声源识别方法,探索如何提高其精度和效率,为解决城市噪声污染问题提供支持和借鉴。
二、研究内容本文的研究内容主要包括以下几个方面:1.综述噪声源识别技术的研究现状和发展趋势,对比分析不同技术的优劣特点,总结存在的问题和解决方案。
2.介绍矢量阵近场声全息技术的基本原理和特点,分析其在噪声源识别方面的优势和不足之处。
3.研究和改进现有的矢量阵近场声全息技术,提出一种有效的噪声源识别方法。
具体包括矢量阵阵列的优化设计、信号处理算法的改进、噪声源模型的建立等方面的研究。
4.设计并实现实验平台,验证所提出的噪声源识别方法的准确性和有效性。
5.分析实验结果,对所提出的噪声源识别方法进行优化,提出后续改进方向。
三、研究意义该研究的意义在于:1.为解决城市噪声污染问题提供一种新的、可行的噪声源识别方法,有助于提高环境保护工作的质量和效率。
2.推动矢量阵近场声全息技术的发展和完善,为该技术的应用提供支持。
3.丰富并深化噪声源识别技术的研究内容和方向,推动技术的不断创新和进步。
基于声全息技术的噪声源识别方法研究的开题报告一、研究背景和意义:噪声污染是现代社会面临的一个普遍问题,它会给人们的生活和工作带来很大的干扰和危害。
由此,噪声源识别成为了实现环境噪声监测与控制的重要手段。
目前,常用的噪声源识别方法主要有传统的基于声学参数分析的方法、基于机器学习及无监督学习的方法等。
这些方法虽然在一定程度上可以对噪声进行分类和识别,但其准确度和鲁棒性仍有待提高。
基于声全息技术的噪声源识别方法可以综合利用声波信号的全部频谱信息,从而实现更为准确和稳健的噪声源识别。
并且该方法不仅适用于室内和室外的噪声源识别,也可应用于复杂环境下声源的识别,如开车噪声、火车噪声等。
因此,研究基于声全息技术的噪声源识别方法具有重要的应用价值和科学意义。
二、研究内容和方法:本研究旨在通过对声全息技术的深入研究,探索一种基于声全息技术的噪声源识别方法,并对其进行实验验证。
具体研究内容和方法如下:1、研究声全息技术的理论原理及其在噪声源识别中的应用。
2、收集并分析现有的噪声数据集,为研究提供实验数据。
3、设计并实现基于声全息技术的噪声源识别算法,主要包括信号预处理、声全息重建、特征提取及分类识别等关键步骤。
4、在实验室环境下对该算法进行验证,并与传统的基于声学参数分析的方法进行对比,评价其准确度和鲁棒性。
三、预期结果与成果:本研究预计可以得到如下结果:1、探索基于声全息技术的噪声源识别方法,并对其进行实验验证。
2、比较该方法与传统的基于声学参数分析的方法的区别与优劣,证明该方法的准确度和鲁棒性优于传统方法。
3、提供一个新的有效的噪声源识别方法。
四、研究的瓶颈和解决方法:1、数据获取和存储:噪声数据的获取和存储是该研究的一个重要瓶颈。
为解决这一问题,可以通过网络采集现有的噪声数据集,并采用合适的方法进行存储。
2、算法设计与改进:基于声全息技术的噪声源识别方法在实际应用中需要实时性和实用性,对算法的设计和改进是该研究的另一个重要瓶颈。
V ol 38No.Z1Apr.2018噪声与振动控制NOISE AND VIBRATION CONTROL 第38卷第Z1期2018年4月文章编号:1006-1355(2018)Z1-0605-05基于圆柱近场声全息的水下声源定位实验验证堵超然1,邢优胜2,陈鸿洋3(1.OROS 股份有限公司,法国; 2.恒信大友(北京)科技有限公司,北京100102;3.中国舰船研究设计中心船舶振动噪声重点实验室,武汉430064)摘要:为提高水下航行器的声隐身性,或者减少其对海洋环境的噪声影响,噪声源的定位与识别对于制定合理的控制方案具有重要的工程价值。
同时,对水下航行器的声辐射特性进行评估和管理是其升级和使用过程中不可或缺的环节之一。
近场声全息技术利用在船体表面附近测量面测得的声压数据,采用声场变换方法,既可反向重建辐射声源面声场从而定位船体上的噪声源,也可正向重建测量面外部声场从而预测远场声辐射。
通过OROS 水下声全息软件展示如何利用NAH 进行声源定位和远场预测,该软件是目前市场上唯一的水下近场声全息解决方案。
考虑到水下航行器以圆柱体结构居多,本文开展了圆柱近场声全息的实验研究,得到了准确的辐射声场信息,验证了该方法的准确性和有效性,为圆柱近场声全息技术的水下工程应用提供参考。
关键词:声学;水下航行器;圆柱近场声全息;噪声源定位;远场辐射声场计算;实验验证中图分类号:TB565;TB535文献标志码:ADOI 编码:10.3969/j.issn.1006-1355.2018.Z1.130Experiment Verification of Underwater Noise Localization basedon Cylindrical Near-field Acoustic HolographyDU Chaoran 1,XING Yousheng 2,CHEN Hongyang 3(1.OROS,Meylan,France;2.Beijing T &S Technologies Co.Ltd.,Beijing 100102,China;3.National Key Laboratory on Ship Vibration &Noise,China Ship Development and Design Center,Wuhan 430064,China )Abstract :To improve the stealthiness of underwater vehicles,or to reduce the impacts of vessels on the marine environment,it is necessary to identify their noise sources.Furthermore,the proper acoustic control and management of underwater noise radiation of vessels is critical during the intended upgrades and operational service.Near-field acoustic holography (NAH)is a technology that acquires near-field measurements in the vicinity of the hull,which can be back-propagated to locate the hot-spots on the hull,and can be forward-propagated to predict the far-field radiated noise of the vessel.With OROS Underwater Holography software,which is the only underwater NAH solution in the market,the use of NAH for noise localization and far-field prediction is presented.Considering the typical shape of underwater vehicles,cylindrical NAH is adopted in this paper.The accurate acoustic maps generated from experimental measurements verify the correctness and efficiency of this technology in naval applications.Keywords :acoustics;underwater vehicles;cylindrical near-field acoustic holography;noise localization;far-field radiated noise prediction;experiment verification潜艇、鱼雷等水下航行器的声隐身性是其重要性能之一,较大的辐射噪声会暴露其在攻击过程中的位置信息,或者在远场域被敌方探测并进行攻收稿日期:2018-03-13作者简介:堵超然(1985-),女,长沙市人,博士,主要研究方向为声源定位、声品质分析。
压缩机噪声的跟踪采样近场声全息实验研究张海滨;蒋伟康;万泉【期刊名称】《振动与冲击》【年(卷),期】2010(029)011【摘要】降低噪声水平是提高产品质量的一个重要指标,识别噪声和振动源有助于采取针对性措施改进设计,从而达到减振降噪的目的.近场声全息技术的三维可视化功能可以有效地重建声振场,识别噪声源的主要位置.针对工业中广泛使用的旋转机械,提出用跟踪采样技术结合近场声全息方法进行声场分析,可以获取不同旋转区间的声场信息.以小型旋转式活塞压缩机为研究对象,压缩机由压缩机主体和储液器两个主要部分组成.利用Müller-BBM测试系统对压缩机外部声场进行测量,同时跟踪记录压缩机叶片的运动过程,在信号预处理后获取压缩机不同工作阶段的声信号,然后通过近场声全息技术重建了不同工作阶段压缩机表面的声场.重建的结果反映了声源的主要位置和不同工作阶段的变化情况,为近场声全息技术分析旋转机械声源方面提供了参考.【总页数】5页(P51-54,65)【作者】张海滨;蒋伟康;万泉【作者单位】上海交通大学,机械系统与振动国家重点实验室,上海,200240;上海交通大学,机械系统与振动国家重点实验室,上海,200240;上海交通大学,机械系统与振动国家重点实验室,上海,200240【正文语种】中文【中图分类】TB525;TB95【相关文献】1.近场声全息方法识别噪声源的实验研究 [J], 于飞;陈剑;李卫兵;陈心昭2.从噪声中提取弱光信号的采样跟踪滤波器 [J], 米宝永3.应用近场声全息方法对噪声源的实验研究 [J], 宫延明;金涛;谢志东4.针对初级频率标准采样数字跟踪器中频偏和噪声的分析 [J], Lee,WD;李密哲5.无油螺杆压缩机的噪声实验研究 [J], 周景芝;朱夷诗;章华;施嘉冬因版权原因,仅展示原文概要,查看原文内容请购买。
近场声全息试验用于医用制氧机噪声控制家庭医用分子筛制氧机是一种较为普及的新型氧疗设备,医用制氧机但运行噪声通常超过50 dB,从而影响氧疗效果。
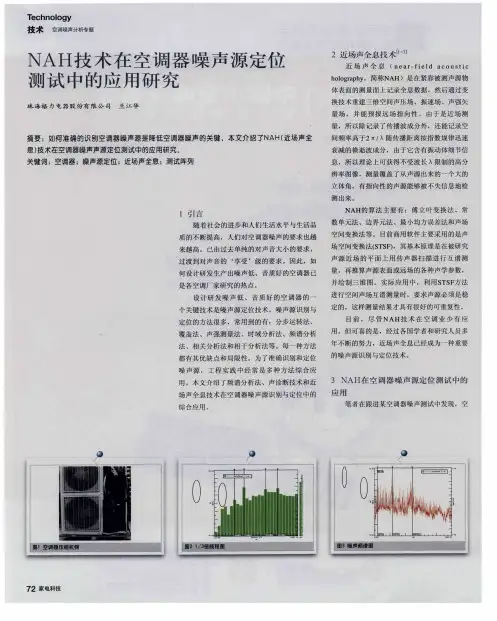
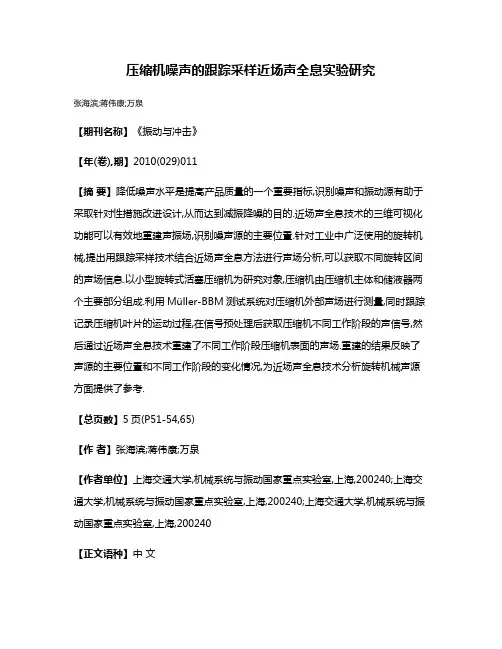
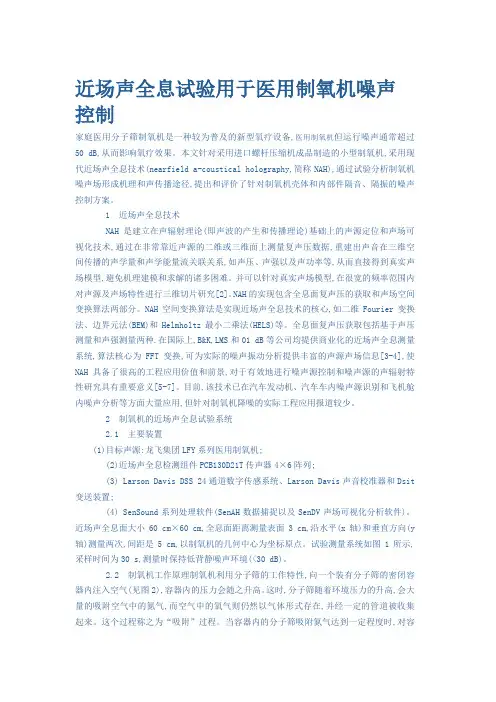
本文针对采用进口螺杆压缩机成品制造的小型制氧机,采用现代近场声全息技术(nearfield a-coustical holography,简称NAH),通过试验分析制氧机噪声场形成机理和声传播途径,提出和评价了针对制氧机壳体和内部件隔音、隔振的噪声控制方案。
1 近场声全息技术NAH是建立在声辐射理论(即声波的产生和传播理论)基础上的声源定位和声场可视化技术,通过在非常靠近声源的二维或三维面上测量复声压数据,重建出声音在三维空间传播的声学量和声学能量流关联关系,如声压、声强以及声功率等,从而直接得到真实声场模型,避免机理建模和求解的诸多困难。
并可以针对真实声场模型,在很宽的频率范围内对声源及声场特性进行三维切片研究[2]。
NAH的实现包含全息面复声压的获取和声场空间变换算法两部分。
NAH空间变换算法是实现近场声全息技术的核心,如二维Fourier变换法、边界元法(BEM)和Helmholtz最小二乘法(HELS)等。
全息面复声压获取包括基于声压测量和声强测量两种.在国际上,B&K,LMS和01 dB等公司均提供商业化的近场声全息测量系统,算法核心为FFT变换,可为实际的噪声振动分析提供丰富的声源声场信息[3-4],使NAH具备了很高的工程应用价值和前景,对于有效地进行噪声源控制和噪声源的声辐射特性研究具有重要意义[5-7]。
目前,该技术已在汽车发动机、汽车车内噪声源识别和飞机舱内噪声分析等方面大量应用,但针对制氧机降噪的实际工程应用报道较少。
2 制氧机的近场声全息试验系统2.1 主要装置(1)目标声源:龙飞集团LFY系列医用制氧机;(2)近场声全息检测组件PCB130D21T传声器4×6阵列;(3) Larson Davis DSS 24通道数字传感系统、Larson Davis声音校准器和Dsit变送装置;(4) SenSound系列处理软件(SenAH数据捕捉以及SenDV声场可视化分析软件)。
波束形成和近场声全息方法在发动机噪声源识别上的应用摘要根据专业机构对汽车市场的调查反应,消费者对发动机噪声的抱怨一致不断,因为它影响到驾乘人员的舒适感。
另外,国家针对汽车加速行驶车外噪声的要求也正在讨论降低噪声水平的要求。
根据汽车加速行驶车外噪声的征求意见稿,新的噪声水平要求降低1-4dB(A),这对汽车的车外噪声提出了更高的要求。
经过大量的研究发现,发动机噪声是汽车加速行驶车外噪声的重要来源。
正是基于市场和国家法规的要求,对发动机的噪声水平提出了更高的要求。
降低发动机噪声的有效途径是,找到发动机的主要噪声源,并有针对性的进行改进,才能取得事倍功半的效果。
但基于发动机声场的复杂性,传统的声源识别方法已经不能满足要求了,必须要开发出能够快速而精确识别噪声源的方法。
为了应对在传统声源识别技术上的缺陷,噪声源识别技术正向着可视化方向发展。
作为工程实际研究,本文讨论了波束形成和近场声全息这两种可视化噪声源识别技术,并将其应用在实际发动机噪声源识别的工程上。
本文首先从理论上研究了波束形成和近场声全息这两种可视化噪声源识别技术,介绍了波束形成的三种方法(基于平面波假设的延迟求和波束形成方法、基于球面波假设的延迟求和波束形成方法、去自谱的互普波束形成方法)及近场声全息的三种方法(二维空间Fourier变换法、边界元法、Helmholtz最小二乘法),研究了它们对声源识别的特点。
基于波束形成和近场声全息这两种可视化噪声源识别技术的特点,以音箱发出的低频和高频声音为声源,开展了这两种可视化噪声源识别技术的多项实验研究,确立了近场声全息方法在低频区域和波束形成方法在高频区域在对声源具有良好的识别能力这一特性。
最后,将波束形成和近场声全息这两种可视化噪声源识别技术应用在实际工程方面。
针对发动机前端面噪声源和发动机前端面异响,采用了近场声全息方法进行识别;针对发动机排气侧噪声和动力总成系统噪声识别采用波束形成方法进行识别,为发动机降低噪声提供了确实可信的指导方向。
基于近场声全息的空压机噪声源识别
毛荣富;朱海潮;陈志敏
【期刊名称】《海军工程大学学报》
【年(卷),期】2011(023)001
【摘要】近场声金息(NAH)是一种有效的噪声源分析工具,当噪声源声场由一些不相干或部分相干的声源叠加而成时.就必须利用声场分解技术将总的辐射声场分解成各个互不相干的子声场,然后再对每一个子声场进行NAH分析.利用NAH争基于偏相干的声场分解技术对CZ-20-C型空压机进行了噪声源识别定位和分解研究.试验结果表明:该方法可以较好地识别出空压机噪声源所在位置,并可计算出各个子声源在总声场中所占的贡献比大小,实现对主要噪声源的贡献定量化分析.为机械的减振降噪工作提供指导.
【总页数】5页(P58-62)
【作者】毛荣富;朱海潮;陈志敏
【作者单位】海军工程大学振动与噪声研究所,武汉,430033;海军工程大学振动与噪声研究所,武汉,430033;海军工程大学振动与噪声研究所,武汉,430033
【正文语种】中文
【中图分类】TB5;TH13
【相关文献】
1.基于等效源法的近场声全息噪声源识别系统研究与开发 [J], 张亚虎;徐亮;毕传兴
2.基于等效源法的近场声全息噪声源识别系统研究与开发 [J], 张亚虎;徐亮;毕传兴
3.基于近场声全息的纺织装备高速运动机构噪声源识别 [J], 徐洋;李昂昂;盛晓伟;孙志军
4.基于等效源法的近场声全息的噪声源识别与定位研究 [J], 陶文俊;郑明辉
5.基于传递函数估计的近场声全息的噪声源识别 [J], 周东旺;李舜酩;江星星;王勇;程春
因版权原因,仅展示原文概要,查看原文内容请购买。
引入声全息技术的发动机噪声源识别试验研究王守健;万里翔;杨明亮;高思奇;苏瑞强;丁渭平【摘要】针对某型3缸汽油发动机运用声全息技术进行发动机噪声源识别.首先在台架上对发动机进行1m声压级瞬态测试,由此确认进气侧的噪声辐射最大.然后在进气侧进行声全息试验,通过分析声压云图和噪声频谱,识别出该发动机进气侧的主要噪声源位于发电机处,噪声峰值频带为1000 Hz~2500 Hz.为了确定噪声源具体位置,结合近场声压法和表面振动法,在声全息识别出的主要噪声源位置进行补测试验,发现发电机的振动和近场噪声峰值频带均与1000 Hz~2500 Hz重合,由此可以确定该发动机进气侧的主要噪声源是发电机.综合运用声全息技术和传统的噪声源识别方法对发动机进行噪声源识别试验,不仅可以提高传统识别方法的效率,还可以弥补声全息技术精度不高的缺陷.%Acoustic holography technique is applied to the experiment of noise source identification for a 3-cylinder gasoline engine. First of all, the transient 1m sound pressure level of the engine is tested. It is found that the noise radiation on the intake side is the largest. Then, acoustic holography test is carried out in the intake side. By analyzing the sound pressure nephogram and noise spectrum, it is found that the main noise source of the intake side locates in the generator area and the frequency band is between 1000 Hz and 2500 Hz. Afterward, a new experiment method combining near-field sound pressure method with surface vibration method is employed in the generator area to identify the precise location of the main noise source. The result shows that both the frequency bands of vibration peak and noise peak are all between 1000 Hz-2500 Hz that is the same as the frequency banddetected by acoustic holograph method. It proves that the main noise source on the intake side is the generator. It is concluded that combining acoustic holography technique with traditional noise source identification methods can raise the efficiency of noise source identification and remedy the defect of low precision of identification in acoustic holography technique.【期刊名称】《噪声与振动控制》【年(卷),期】2017(037)003【总页数】5页(P203-206,215)【关键词】声学;发动机噪声;声全息技术;近场声压法;表面振动法;噪声源识别【作者】王守健;万里翔;杨明亮;高思奇;苏瑞强;丁渭平【作者单位】西南交通大学机械工程学院,成都 610031;西南交通大学机械工程学院,成都 610031;西南交通大学机械工程学院,成都 610031;西南交通大学机械工程学院,成都 610031;西南交通大学机械工程学院,成都 610031;西南交通大学机械工程学院,成都 610031【正文语种】中文【中图分类】U464;TB52发动机噪声作为汽车的主要噪声源,已经成为影响汽车舒适性的主要原因。
近场声全息方法识别噪声源的实验研究Ξ于 飞 陈 剑 李卫兵 陈心昭(合肥工业大学机械与汽车工程学院 合肥,230009)摘 要 根据近场声全息(NA H)的原理,建立了全息实验所需要的采集、分析系统。
针对影响重建精度较大的截止波数的选取问题,给出了较为详细的讨论,并提出一种不需先验知识的截止波数选取方法。
最后通过对实测数据进行全息变换,重建结果表明:在采用提出的截止滤波选取方法后,NA H技术可以精确地对噪声源进行定位与识别,并且可以得到三维空间内的声压、质点振速和声强矢量等声学信息。
关键词:声源识别;近场声全息;实验研究;截止波数中图分类号:TB532;TB533+.2 进行空间声场的可视化和噪声源的识别与定位,对于噪声测量和控制工程具有非常重要的意义。
上世纪80年代初提出的近场声全息技术(NA H),便是可视化空间声场和定位噪声源的一种强有力工具。
近场声全息可以由一个测量面的声压标量数据,反演和预测另一面上的声压、质点振速、矢量声强等重要声场参量,受到了各国研究人员及一些相关公司的重视。
近场声全息技术真正地将丰富的声学理论同噪声测量、控制工程紧密地结合起来[1~2]。
20世纪80年代末,国内一些学者逐渐对此方法进行了研究:中科院武汉物理所对编磬表面振动模态做了研究[3~4];哈尔滨工程大学对基于边界元法的水下近场声全息也做了研究[5];清华大学汽车工程系对非近场声全息确定噪声源进行了研究[6~7];合肥工业大学机械工程学院对近场声全息方法识别噪声源作了一定的研究[8~9]。
近场声全息可以不受波长分辨率限制重建声场,但在此种全息过程中截止波数的选取对重建分辨率的影响非常大。
文献[3]提出一种需要测量先验知识的优化滤波方法,而这种先验知识一般是不易获得的。
本文根据截止波数的大小对重建结果的影响趋势,提出一种不需要先验和后验知识的截止波数选取方法。
并根据近场声全息的原理,建立了全息实验所需要的采集、分析系统。
采用提出的滤波参数选取方法后,对数据进行全息变换,得到了令人满意的重建结果。
该优化截止波数选取方法的提出,有助于在实际工程中推进近场声全息技术在高分辨率识别噪声源、可视化声场等方面的应用。
1 理论背景由文献[1,8]可知,在稳态的三维空间声场中,一个平面(全息面)上声压的波数谱与另一个更靠近声源的平行面(声源面或重建面)上声压和质点法向振速的波数谱之间的关系为P(k x,k y,z S)=P(k x,k y,z H)e-i k z(z H-z S)(1) V(k x,k y,z S)=k z P(k x,k y,z H)e-i k z(z H-z S) Θ0ck(2)式中 z H和z S分别为全息面和重建面的z坐标;k 为声波数;k x和k y分别为对应坐标x和y的波数;而k z与波数k x,k y之间的关系为当k2x+k2y≤k2时k z=k2-(k2x+k2y)(3)当k2x+k2y>k2时k z=i(k2x+k2y)-k2(4) k z取值为式(3)时,对应的声波传播方式是以幅值不变、相位改变的传播波方式传播;当取值为式(4)时,对应的声波传播方式是以相位不变、幅值减小的倏逝波方式传播。
倏逝波随全息面与重建面之间距离的增加,成指数倍地迅速衰减,对应的是高波数成分的声波。
在非近场的声全息中,由于测量点位置与声源面之间距离过大造成倏逝波信息的丢失或被测量噪声所掩盖,全息重建的结果也就失去高频信息,这种高频信息类似于小波变换处理图像中的细节信息。
近场声全息技术除了能够由全息声压数据重建源面上的声压和法向振速之外,由Eu ler公式还能第17卷第4期2004年12月振 动 工 程 学 报Jou rnal of V ib rati on EngineeringV o l.17N o.4D ec.2004Ξ国家自然科学基金资助项目(编号:50275044)及高等学校博士点科研基金资助项目(编号:20020359005)收稿日期:2004203203;修改稿收到日期:2004205231够得到源面上的二维切向振速分布U (k x ,k y ,z S )=k x P (k x ,k y ,z H )e-i k z (z H -z S )Θ0ck(5)W (k x ,k y ,z S )=k y P (k x ,k y ,z H )e-i k z (z H -z S )Θ0ck(6)式中 U 和W 分别代表声源面上振速x ,y 方向分量u 和w 的波数谱。
声强矢量是表征空间中声能量流向的重要物理量,经常用于噪声源的定位和识别。
其中,有功声强表示声源各点对外声辐射强度的大小及声能量的流动方向,其定义为I =12R e[p v 3](7)式中 “*”表示取共轭,R e 表示取实部。
2 实验测量全息测量实验在半消声室中进行,实验室本底噪声小于28dB ,测量装置在消声室中的实物照片如图1所示。
实验所用到的主要设备为:尺寸为60c m ×14c m ×1512c m 的音箱作为目标声源,16通道的信号采集器,16通道的信号调理器,传声器等等。
全息面的大小为113m ×113m 的面,全息面距离音箱声源面的距离为12c m ;沿水平方向(x 轴)和竖直方向(y 轴)的全息测量间隔均为5c m ,同时以音箱两纸盆间的中间点为坐标系原点。
图1 近场声全息测量系统在半消声室中的照片通过信号发生设备,产生主频为400H z 的信号,经信号放大器处理后,传输到目标声源使之发出声音。
首先在声场中布置一个自始至终不动的参考传声器,另一传声器线阵在全息网格点上做扫描式测量。
最后由测得的参考传声器和扫描传声器信号,经过信号调理器的放大处理,由采集器采集到这些经过处理后的声信号。
采集器的采样频率为5kH z ,每块采样长度为1024点的时域数据,对全息面上每一点的声压信号连续采样32块。
假设参考传声器采集的时域声压信号为p r (t ),扫描传声器采集的声压为p h (t )。
为获得全息面上的复声压,可采用参考传声器互谱法获取全息面上各点的声压相位Η(Ξ),即Η(Ξ)=arg [S r ,h (Ξ)S r ,r (Ξ)](8)式中 S r ,h (Ξ)为参考声压p r (t )与扫描声压p h (t )的互谱;S r ,r (Ξ)为参考声压p r (t )的自谱;arg 表示取相位。
全息面上的声压幅值可以通过扫描声压p h (t )的自谱得到p (Ξ)=S h ,h (Ξ)(9)由式(8)~(9),最终可以得到全息测量面上的复声压的幅值和相位分布,结果如图2所示。
3 分析处理由采集得到的声时域信号,经过自、互谱处理得到全息面上的复声压,再通过声全息变换可以得到364第4期于 飞等:近场声全息方法识别噪声源的实验研究声源面上的声学信息。
倏逝波成分的存在可以进行高分辨率的全息重建,但是又因为倏逝波的存在,不能采用截止波数很低的滤波处理方法,否则高波数的误差将会同倏逝波成分一起被放大[3,8]。
于是截止波数的选取起着非常关键的作用,根据截止波数的大小对重建结果的影响趋势,本文提出一种不需要先验或后验知识的截止波数确定方法。
当截止波数k c 过大时,滤波处理不能有效地抑制重建过程中的高频误差,由此造成的结果是重建得到的声压p s 幅值过大;另一方面当截止波数过小时,由重建得到的声压p s 再反推全息面上声压,此时得到的声压分布假设为p ′h ,与全息测量声压p h之间的22范数误差将会非常大。
综合上述两种矛盾的因素,可以定义一个目标函数F (k c ),使其能反映出两种范数变化的趋势,使目标函数达到最小。
F =ΚE +P (10)式中 加权系数Κ的引入是为了保证两项都能够在同一的数量级,同时反映出两项的变化趋势。
其中项E ,也就是通过反推得到的全息面上的声压同实际测量得到的全息声压之间的残余误差,即E =∑Nn =1‖ph(n )-p ′h (n )‖22(11)式中 ‖・‖2表示22范数,∑表示对全息面上所有点的声压残余误差‖p h (n )-p ′h(n )‖2求平方和。
而式(10)中的项P ,则反映源面上的经过滤波处理后重建得到的声压幅值大小,即P =∑Nn =1‖ps(n )‖22(12) 引入加权系数Κ,是为了保证式(10)中目标函数F 能够反映两项的变化趋势。
在加权系数Κ=8的情况下,计算得到的目标函数曲线如图3所示:当截止波数k c 较小时,目标函数F 的值主要由E 来决定,反映出全息重建的残余误差随截止波数的变化趋势;当k c 较大时,目标函数F 的值主要由P 来决定,同样也反映出重建得到的源面声压幅值随截止波数的变化趋势。
该图还给出了上述两项分别随截止波数k c 的变化曲线,它们也充分说明了目标函数的确定符合预期的理论分析。
通过目标函数最小值所在的截止波数位置,即可确定优化后的截止波数为27102。
于是,可以选取k c =27102,用来重建距离音箱2c m 处的声压,在中心处13×13个节点上的重建声压幅值与实测声压幅值的比较如图4所示。
由该图可以得到:重建结果和实际测量的结果之间吻合得较好,从而也就验证本文提出的截止波数选取方法是有效的。
截止波数选取不当,对重建结果的影响可以参见文献[8],而本文通过构造目标函数解决了滤波参数的合理选取问题。
图3 在不同截止波数下的目标函数曲线图4 重建声压幅值与实测值之间的比较—实测结果 222重建结果近场声全息技术作为一种高分辨率声场成像和重建技术,主要可用于声辐射机理和声源识别等方面的研究。
以往采用声强矢量,通过其反映的声能量流向关系,确定噪声源的位置和强弱。
利用式(2)及式(5)~(7)也可以重建近音箱2c m 面上的三维有功声强,结果如图5所示:图5(a )表示该面上各点向外辐射的声能强度,图5(b )表示重建面上的声能流向关系。
由图5得到的声场图像可以清楚地辩识出两个主要声源的位置和声辐射的强度大小,结果和实际声源布置的吻合得相当好,从而达到预期的声源识别目的。
然而直接利用测量得到全息面上的声压幅值分布(如图2(a ))是不能够得到这样清晰的声源定位和识别的。
464振 动 工 程 学 报第17卷 利用全息面上的声压重建面x =0上的声压分布结果如图6所示,该图反映了从两纸盆向外声辐图6 重建得到的坐标x =0平面上的声压分布射方向上各点声压的大小,也可以用来准确地定位声辐射源和辐射场的分布情况。
4 结束语本文简明地给出近场声全息变换的基本公式及相应的物理解释,并根据其基本原理,建立起全息实验所需要的采集、分析和变换系统。
利用参考传声器互谱法计算全息面上的声压相位和扫描传声器自谱法计算声压幅值的公式,通过大量的实验测量得到全息面上的复声压数据。