自动驾驶仿真蓝皮书2019修改版_虚拟场景数据库
- 格式:pdf
- 大小:1.11 MB
- 文档页数:13
本⽂收集了⾃动驾驶⾏业相关的法规标准,包括LDW、FCW、AEB等法规标准原⽂及解读资料,后续将持续更新。
以下是资料⽬录,点击 蓝⾊字体可进⼊链接:⼀、车道偏离预警系统(Lane Departure Warning Systems,LDWS)1. 车道偏离预警系统(LDWS):ECE R130-2013法规原⽂2. 车道偏离预警系统(LDWS):ISO 17361-2017标准原⽂3. 车道偏离预警系统(LDWS):GB/T 26773-2011标准原⽂4. 车道偏离预警系统(LDWS):GB/T 26773-2011标准解读5. 营车辆⾏驶危险预警系统:JT⁄T 883-2014标准原⽂⼆、车辆前向碰撞预警系统(Forward Vehicle Collision Warning Systems,FVCWS)1. 车辆前向碰撞预警系统(FVCWS):ISO 15623-2013标准原⽂2. 车辆前向碰撞预警系统(FVCWS):GB/T 33577-2017标准原⽂3. 营车辆⾏驶危险预警系统:JT⁄T 883-2014标准原⽂三、⾃动紧急制动系统(Advanced Emergency Braking Systems,AEBS)1. ⾃动紧急制动系统(AEBS):ECE R131-2014法规原⽂2. ⾃动紧急制动系统(AEBS):ECE R152-2020法规原⽂3. 商⽤车辆⾃动紧急制动系统(AEBS):GB/T 38186-2019标准原⽂4. 商⽤车辆⾃动紧急制动系统(AEBS):GB/T 38186-2019标准解读5. 营运车辆⾃动紧急制动系统(AEBS):JT⁄T 1242-2019标准原⽂6. ⾃动紧急制动系统(AEBS):GB/T 38186-2019与JT/T 1242-2019对⽐分析四、NCAP1. ⾃动驾驶 | 2021版 C-NCAP管理规则正式发布【免费下载】2. ⾃动驾驶 | 2021版 C-NCAP管理规则解读五、其他1. GB 7258-2017《机动车运⾏安全技术条件》中即将实施的EDR及DVR相关标准解读。
智能汽车虚拟实训仿真平台开发与应用宫唤春【摘要】智能汽车涉及车辆、机械、通信、自动化等多个学科交叉融合,尚未有成熟的实验教学平台.利用PanoSim软件开发智能汽车虚拟实训仿真平台,该平台将智能汽车系统可视化显现,能够在线选取车辆模型及设置运行环境状态,实现实时虚拟仿真,仿真结束后可以调取车辆测试曲线和数据,并回放实验视频便于分析车辆运行状态,操作简便、精度可靠,能够满足教学和科研的需要.【期刊名称】《北京汽车》【年(卷),期】2019(000)001【总页数】4页(P20-22,26)【关键词】智能汽车;虚拟实训;仿真平台;PanoSim软件【作者】宫唤春【作者单位】燕京理工学院,河北廊坊 065201【正文语种】中文【中图分类】U46;TP391.9我国汽车中长期发展规划明确指出汽车行业向着智能化、电动化、网联化和共享化新“四化”方向发展[1]。
随着人工智能技术的不断发展与应用,智能汽车的研发与应用成为研究的热点,智能汽车也成为汽车产业重点发展的目标。
智能汽车技术涉及车辆、电学、计算机、自动化、通信、机械等多个学科交叉融合,需要合理设计开发智能汽车实训平台,通过有效实训才能对智能汽车结构及核心技术更加了解[2]。
目前智能汽车实训测试教学平台非常少,实车实验台虽然能够满足一段时间的实验教学需求,但是随着技术不断升级,实验台面临设备更新与改造等问题,会造成资源浪费;因此,开发智能汽车虚拟实训仿真平台用于智能汽车实训教学非常必要[3]。
利用PanoSim软件[4]开发智能汽车虚拟实训仿真平台,用于智能汽车实训教学,该平台具有可视化、在线修改参数以及实时测取车辆运行数据等功能,便于学生直观学习掌握智能汽车结构与组成原理,且实验平台可以在线升级改造用于开发创新实验项目及添加最新应用技术,使得实验平台能够可持续性使用,节约实验台开发成本。
PanoSim软件包括各类车辆系统动力学模块、三维行驶模块、道路环境模块、交通信息模块、车载感应装置模块、导航通信模块、Matlab/Simulink可视化仿真模块、数据图像回放处理等模块集成一体的实时仿真测试车辆虚拟平台[5]。
国外自动驾驶测试示范区现状作者:袁建华王敏陆文杰罗为明郑羽强来源:《汽车与安全》2018年第03期1美国自动驾驶测试场建设2015年7月,全球首个自动驾驶封闭测试区M-City正式开园并引发广泛关注,也推动了世界各国竞相开展自动驾驶测试场的建设。
2016年11月,美国交通部公布“自动驾驶试验场试点计划”,并于2017年1月19日确立了10家自动驾驶试点试验场。
以下对这些具有代表性的自动驾驶测试场地进行介绍。
1.1密歇根大学 M-CityM-City于2015年7月20日正式开放,是世界上首个测试自动驾驶汽车、V2V/V2I车联网技术的封闭测试场,由密歇根大学移动交通研究中心负责建设运营。
测试场位于密歇根州安娜堡市密歇根大学校园内,占地194亩,车道线总长约8公里,设置有多种道路和路侧设施模拟实际道路环境,主要包括用于模拟高速公路环境的高速实验区域和用于模拟市区与近郊的低速实验区域。
其中,模拟市区的低速试验区完全模仿普通城镇建造,包含两车道、三车道和四车道公路,以及交叉路口、交通信号灯和指示牌等,提供了真实的路面、标志标线、斜坡、自行车道、树木、消防栓、周边建筑物等真实道路场景元素。
M-City自2013年开始设计,2014年正式建设,启动资金总计1000万美元,由密歇根大学和密歇根州交通部共同出资。
2015年7月正式开园运营,并引进了大量合作企业,包括17家“领导圈”会员和其他49家联盟成员,涉及汽车制造商、大数据管理、通信、货运和重型车辆、交通控制系统、保险、公共交通、支付系统、智能停车场等诸多行业。
M-City是一个封闭的场地,出于安全和保密问题,访问仅限于参与试验的研究者,并按照不同级别的会员进行测试收费。
1.2美国交通部十大自动驾驶试点试验场美国交通部指定的10个自动驾驶试点试验场分布于9个州,分别位于美国的东北部、东部、东南部、北部、中西部、南部、西部、西南部,实现了美国交通部希望的地区发展平衡。
收稿日期:2020-08-28作者简介:黄旺(1985—),男,硕士,工程师,主要从事软件测试工具开发和测试技术的研究工作。
机车智能驾驶纯数字仿真测试系统研究黄 旺,刘布麒,刘梦琪,彭辉水(中车株洲电力机车研究所有限公司,湖南 株洲 412001)摘 要:针对机车智能驾驶软件测试,若采用传统软件测试方法,则存在测试环境建设成本高、测试设备占地面积大、系统通用性差及测试执行效率低等问题。
为此,文章提出一种基于纯数字仿真的测试方法,其通过Visual C++语言编写软件,模拟自动驾驶装置、人机交互单元、LKJ 装置及车载控制系统装置等硬件设备。
该纯数字仿真测试系统已被用于西康线机车自动驾驶项目,结果表明,其不仅可自适配不同运行线路,而且具备仿真加速功能,测试环境成本降低90%,测试时间缩短75%,测试效率提升4倍以上。
关键词:智能驾驶;软件测试;纯数字仿真;自动驾驶中图分类号 :TP13;U260.1 文献标识码 :A 文章编号 :2096-5427(2020)06-0014-05doi:10.13889/j.issn.2096-5427.2020.06.003Research on Full Digital Simulation Test System for Locomotive Intelligent DrivingHUANG Wang, LIU Buqi, LIU Mengqi, PENG Huishui( CRRC Zhuzhou Institute Co., Ltd., Zhuzhou, Hunan 412001, China )Abstract: In view of the problems of high construction cost of test environment, large area occupation of test equipments, poor system generality and low test execution efficiency encountered by traditional software testing methods in the process of locomotive intelligent driving software testing, this paper presented a test method based on full digital simulation. It uses software with Visual C++ to simulate the functions of hardware devices such as automatic train operation device, driver machine interface, LKJ device and onboard central control unit, etc. The proposed digital simulation test system has been applied to the locomotive automatic driving project of Xikang line. The results show that the method can adapt to different running lines with the function of simulation acceleration to significantly reduce 90% test cost and 75% test time, and the test efficiency is increased to more than 4 times of the existing hardware in the loop simulation test efficiency.Keywords: intelligent driving; software test; full digital simulation; automatic driving0 引言随着列车速度规划曲线神经网络算法[1-2]、节能优化操纵算法及基于增量特征学习的深度学习算法[3-5]等技术的不断涌现,铁路行业机车智能驾驶技术的理论研究在不断深入,应用范围也日趋广泛。
ICS93.080.30P 66 DB13 河北省地方标准DB 13/T 5085—2019 公路改扩建工程交通仿真指南2019-11-28发布2019-12-28实施前言本标准按照GB/T 1.1-2009给出的规则起草。
本标准由河北省交通运输厅提出并归口。
本标准主要起草单位:衡水市公路工程质量监督站、衡水市交通运输局、石家庄铁道大学。
本标准主要起草人:杨永亮、贾世东、赵青、卜宝峰、陈队永、谢灏、刘博航、李万峰、许洪亮、秘霄龙、杨念、黄安双、蔡鑫、袁琼琼、朱宝军、秦春阳、马光、牛长松、刘会新、李健慧、王桐。
公路改扩建工程交通仿真指南1 范围本标准规定了公路改扩建项目交通仿真的术语和定义、基本规定、仿真项目分类、交通调研与调查、道路条件建模、交通流条件建模、交通控制管理及运行环境条件建模、模型修正、模型校验和交通仿真报告。
本标准适用于公路改扩建项目施工期间的交通仿真。
2 规范性引用文件下列文件对于本文件的应用是必不可少的,凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改)适用于本文件。
JTG B01 公路工程技术标准JTG D82 公路交通标志和标线设置规范JTG F90 公路工程施工安全技术规范JTG/T Lll 高速公路改扩建设计细则JTG/T L80 高速公路改扩建交通工程及沿线设施设计细则JTJ 002 公路工程名词术语DB13/T 2529 公路交通仿真准则3 术语和定义JTJ 002、JTG B01、JTG D82、JTG F90、JTG/T Lll、JTG/T L80和DB13/T 2529界定的及下列术语和定义适用于本文件。
3.1公路交通仿真 traffic simulation of highway以计算机作为主要工具,以信息技术、相似原理、系统工程和交通工程领域的基本理论及专业技术作为基础,利用交通系统仿真模型对公路交通系统的运行状态进行模拟,采用数字或图像的方式来描述公路动态交通系统,以便于控制和把握该系统的一门实用技术。
实验二Virtuoso ADE仿真环境的基本使用目录1. 实验目的2. 瞬态仿真3. 熟悉Cade nee模拟仿真环境下波形显示窗口界面4. 学会使用波形计算器计算电路的各种参数5. 直流仿真6. 交流仿真1. 实验目的本实验主要介绍使用模拟仿真器spectres进行几种常用的仿真,包括瞬态仿真, 直流仿真和交流仿真。
本实验直接使用在实验一创建的反相器,所以要求完成实验一后才能开始本次实验。
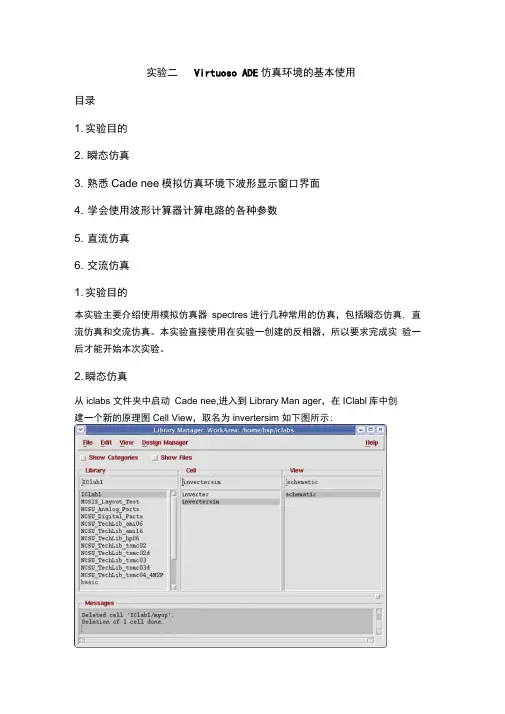
2. 瞬态仿真从iclabs 文件夹中启动Cade nee,进入到Library Man ager,在IClabl库中创建一个新的原理图Cell View,取名为invertersim 如下图所示:瞬态仿真反映输出与时间的关系。
使用Virtuoso 原理图编辑器创建如下图所示电 路,其中的反相器符号是在实验一创建的, 它位于ICIabl 库中,而直流源和脉冲 信号源则位于AnalogLib 库中的VoItage_Sources 分类栏目中。
名称分别为 vdc 和 vpulse 。
其中直流源的直流电压设为5V ,脉冲信号源的详细参数设置如下图:Deslgm Wdow Edit Add diedk SHe&G OfjtlDiis Migrate Nl 匚吕U口Chi 朮 Sei :卜便Ip・inverteirTLTLIK v1:fl zJv2=tjtr —2n ■V irlumn : Sch^nuidcICIahl inv<TfcrMm v-hpm^lk:n・亠net2KO use LH:检查并保存刚创建的原理图,点击 Lau nch-->AD [打开仿真环境窗口。
首先需要 选择仿真器,点击Setup-->Simulator/Directory/Host …选择spectre 仿真器,如下 图:Choosfng simuiator/Directory/Host — ADE L (11)x之所以选择spectre 仿真器是因为我们关联的工艺库中器件模型是按照 spectre仿真器要求的格式建立的,选定它后模拟设计环境界面将看上去如下图:ADE L (11) - dacllb Ihvertersim schematicLaunch Session Setup QnalysE 占 Variables (hutputs Simulation Results Tools Calibre Help C 3] d £ A C &现在即可开始瞬态仿真,点击 Analyses-->Choos …打开一对话窗,按下图完成Simulator Project Directory Host Mode^spectreQ+/Simulation•^local 7 remote distributedHostRemote DirectoryAn^ljjses7 S XOutputs 下 吕 xNwe/Si90a 1/ExprValue , Plot Save ( Save Options |' ACVJ KsJfF-W*[E]aLJ73(122) Enviforiiwent **.*Status : Reidy T=27 C Siiwlstor: spectreiDefaultwCancelDesign VariablesPlot aftsr slmjlstlofij^oPlotting node ReplaceChaosfng Analyses -- ADE L (11) Analysis■tran de• — ac noisej xf〜sens + dematuh—stb2 sp —envlp o ps^"j pac—pstb* pnoise j pxfPSP -qp^S-qp恥j qpnoiseqpxF hbnoise一qp即7 hLsphb—hbac Transient AnalysisStop T ime500n|ftccu r BU炒Def aultj^ (errprese t) */conservative moderate1iberalTransient Noise_ lynannic ParameterEnabled "Options,*4现在还需要点击Setup-->Model Libraries…来确认模型所在的路径,如下图:】•••Jd /data/hoRe/1 md/hxp/t /tsmclft-f /»»/node 1 s/s pcctre/rFOlS +scs tt_resi-y/data/lw*#/1 md/hxp/tsmcl^f/tsFK16rf / * */*»ode 1 s/spwtre/r foiS * sc*Lsr# Zdata/kw;/1 riid/hxp/tsincl&r-F/tsmclSrf/ + # /和山1 s/spectre/rfOlS+scs tt-rfmos# /data/hone/1 md/hxp/tsmclftr-F/tsmclSrf/ + +/node 1 s/spectre/rF018+scs tt_rfmos33j£/data/heme/1 md/hxp/tsmcl8^f/tsmclSrf/,- »/i*ode 1 s/spectre/rFQlS t scs tt.rfmini !■■■■士/data/hc*e/1 md4iixp/tsh,icl8r!F/tswc 18rF/ * * /node 1 s/spectre/rf 010 * scs tt.rFlnd i—7 /data/hiotte/1 md/lhxp/tsmcl8rf/tsmcl8rf/ + +/node 1 s/spectre/rF048+scs tt rfmvar艺Zdata/hoBe/1 rnd/hi^/tsinclSrf/tsmclSrf/ ++ /node 1 s/spectre/rfOlS+scs tt_rfjvarr j i /datd/ho*e/1 md/hxp/tsmcl.&rf/tsncl&rf/t t/Md81 s/sp«tr8/rfO10 * scs tt_rfres_ia\.X Zdata/hcme/1 md/hxp/tsmEl&rf/tsmEiarf /* /node 1 s/speetre/rfOlS+ses tt_rfres_rpa E# /data/hone/1 md/hxp/tsmclSr-F/tsmclSrf/ + +/node 1 s/spectre/rF018+scs tt_r fr es.hr i_s! /data/hme/1 md/hxp/tsmcl8rf/tsmclSrf/ * + /node 1 s/spectre/rF018+scs tt.rfesd卜/data/lw«Z 1 md/htp/tsmclftrf/tsiwierf / * */wd81 s/spwtrsZr h)!B * scs 忸上血3 uH <Click here to addl model file> 1 「ii川Lancej / v ApplH j、Halp 设置完成后的模拟仿真环境界面如下:spectreI4; Model Lifar^ry SetupLaunch Session 血点击绿色交通灯图标开始仿真,若仿真有错则会在CIW窗口中显示,若仿真成功,则可点击菜单Results-->Direct Plot-->Transient Signql然后会自动进入到仿真电路原理图编辑器,并在窗口底部提示要求你选择要观察电路中哪些节点的波形,本次实验只需选择反相器输入输出端两个节点。

3.1 交通仿真软件选取3.1.1宏观交通仿真软件简介宏观交通仿真模型忽略移动单元(车辆、行人、非机动车等)个体行为,以交通流整体作为描述对象来从整体的角度描述交通流的运动特征。
宏观模型的重要参数是车辆速度、密度和流量,对交通系统的要素及行为的细节描述处于一个较低的程度。
常用的宏观交通仿真软件有TransCAD、CUBE、VISUM。
1、TransCADTransCAD是由美国Caliper公司开发的一套强有力的交通规划和需求预测软件,美国CALIPER公司是驰名交通规划软件TransCAD、交通仿真软件TransModeler和地理信息系统软件Maptitude的开发商。
CALIPER公司自1983年成立以来,已有25年的交通软件开发和规划咨询经验。
总部设在麻省牛顿市的CALIPER公司致力于将先进的地理信息系统技术与科学的交通规划和管理方法相结合,为交通规划和交通工程技术人员提供有效的定量决策支持工具、高质量的咨询服务业务和有关数据产品。
TransCAD是第一个为满足交通专业人员设计需要面设计的地理信息系统,可以用于储存、显示、管理和分析交通数据,同时将地理信息系统与交通需求预测模型和方法有机结合成一个单独的平台,是世界上最流行和强有力的交通规划和需求预测软件。
TransCAD在70多个国家有超过7500余用户,在美国25个以上的州是标准的或占主导地位的交通规划软件,被175个美国大都市规划组织(MPO)所使用。
TransCAD主要功能如下:⏹提供强力的GIS引擎,具备用于交通的特殊扩展功能;⏹可实现各种地图制作,地图寻址,是专为交通应用而设计的可视化和分析工具;。
⏹具备各种应用程序,可用于寻找路径,交通需求预测,公共交通,物流,选址及销售区域管理;⏹可用于所有交通数据形式和所有交通模式,是建立交通信息和决策支持系统的理想工具;⏹在带微软视窗的常用计算机硬件上都能运行,支持几乎所有桌面计算系统标准。
ICS 43.040.10CCS T36中华人民共和国国家标准GB XXXXX—XXXX `智能网联汽车自动驾驶数据记录系统Intelligent and connected vehicle - Data storage system for automated driving(征求意见稿)在提交反馈意见时,请将您知道的相关专利连同支持性文件一并附上。
XXXX-XX-XX发布XXXX-XX-XX实施目次前言 (II)1 范围 (3)2 规范性引用文件 (3)3 术语和定义 (3)4 技术要求 (5)4.1 总体要求 (5)4.2 I型系统数据记录要求 (5)4.3 II型系统数据记录要求 (6)4.4 数据元素要求 (6)4.5 数据存储要求 (11)4.6 数据读取要求 (12)4.7 信息安全要求 (16)4.8 耐撞性能要求 (16)4.9 环境评价性要求 (16)5 试验条件 (20)5.1 试验场地及试验环境要求 (20)5.2 试验设备及数据记录要求 (20)5.3 试验车辆要求 (21)6 试验方法 (21)6.1 触发试验 (21)6.2 连续记录触发试验 (23)6.3 碰撞试验 (23)6.4 数据准确性验证试验 (23)6.5 数据存储机制试验 (24)6.6 车规级环境试验 (25)6.7 信息安全试验 (29)7 车辆型式的扩展 (29)7.1 总则 (29)7.2 判定条件 (30)8 实施日期 (30)附录A(规范性)数据配置文件要求 (31)A.2 数据配置文件中的文件描述 (31)A.3 数据配置文件中的数据描述 (31)A.4 数据配置文件中的数据字典 (31)附录B(规范性)数据提取符号定义 (32)前言本文件按照GB/T 1.1—2020《标准化工作导则第1部分:标准化文件的结构和起草规则》的规定起草。
本文件由中华人民共和国工业和信息化部提出并归口。
GB XXXXX—XXXX 智能网联汽车自动驾驶数据记录系统1 范围本文件规定了智能网联汽车自动驾驶数据记录系统的技术要求和试验方法。
A VL_CRUISE_2019_整车经济性动力性分析操作指导书AVL CRUISE纯电动汽车经济性动力性分析操作指导书目录第一章 AVL Cruise 2014 简介 (2)1.1 动力性经济性仿真集成平台 (2)1.2 A VL Cruise建模分析流程 (3)1.3 主要模块功能 (4)1.4 A VL Cruise计算任务的设定 (9)第二章汽车零部件模型建立 (14)2.1.软件启动 (14)2.2.Project创建 (15)第三章整车动力经济性分析模型连接 (44)3.1.部件之间物理连接 (44)3.2.部件之间信号连接 (45)第四章整车动力经济性分析任务设置 (49)4.1 爬坡性能任务制定 (50)4.2 等速百公里油耗分析 (53)4.3 最大车速分析 (56)4.4 循环工况油耗分析 (59)4.5 加速性能任务制定 (62)第五章计算及分析处理 (65)5.1. 计算参数设置 (65)5.2. 分析处理 (65)第六章整车动力性/经济性计算理论 (71)6.1 动力性计算公式 (71)6.1.1 变速器各档的速度特性 (71)6.1.2 各档牵引力 (71)6.1.3 各档功率计算 (72)6.1.4 各档动力因子计算 (72)6.1.5 最高车速计算 (72)6.1.6 爬坡能力计算 (73)6.1.7 最大起步坡度 (74)6.1.8 加速性能计算 (74)6.1.9 比功率计算 (76)6.1.10 载质量利用系数计算 (76)6.2 经济性计算公式 (76)6.2.1 直接档(或超速档)等速百公里油耗计算 (76)6.2.2 最高档全油门加速500m的加速油耗(L/500m) (77)6.2.3 循环工况百公里燃油消耗量 (78)第一章 AVL Cruise 2014 简介1.1 动力性经济性仿真集成平台AVL Cruise是AVL公司开发一款整车及动力总成仿真分析软件。
第5章虚拟场景数据库5.1自动驾驶虚拟场景库5.1.1自动驾驶虚拟场景库的概念与构建要求(1)自动驾驶虚拟场景库的概念自动驾驶虚拟场景库即由满足 种测试需求的一系列自动驾驶测试场景构成的数据库。
其中,单个自动驾驶测试场景包括静态场景与动态场景。
静态场景通常包括道路设施(道路、桥梁、隧道等),交通附属设施(标志标牌、公交站点等),周边环境(路灯绿化带、建筑物)等;动态场景通常包括交通管理控制,机动车,行人与非机动车等。
根据测试需求,选取特定的自动驾驶虚拟场景,构建支持检索、调用等操作的数据库,即自动驾驶虚拟场景库。
(2)自动驾驶虚拟场景库构建要求单个自动驾驶测试场景构建要求:要求虚拟静态、动态场景可高度还原对应的现实情况,所含关键信息齐全,可支持高精度的传感器仿真;动态场景如支持交通智能体行为及与主车互动,则可进一步 升测试效果。
自动驾驶测试场景库构建要求:根据测试需求,选择的测试场景应能在统计学上覆盖现实交通中部分典型现象,从而在 种程度上替代对应的路测场景;场景库中的场景应分类明确,支持快速检索与调用。
5.1.2自动驾驶虚拟场景库的数据来源与构建方法(1)自动驾驶虚拟场景库的数据来源自动驾驶虚拟场景库以虚拟场景为元素,其数据来源即虚拟场景的基础数据,主要包括:构建静态场景的基础数据,主要包括高精地图,采集的视频、激光点云等多构建动态场景的基础数据,主要包括交通管控方案(道路限速、信号配时等),视频、雷达、卫星定位等交通传感器信息(从中可解析交通对象的属性信息与出行轨迹),宏观路况信息(可作为基于仿真模型生成动态场景的输入参数)等,主要来源于交通主管部门的管控方案数据与采集的传感器数据,自动驾驶相关公司的实地采集数据,以及互联网企业统计的路况数据等。
(2)自动驾驶虚拟场景库的构建思路自动驾驶虚拟场景库的构建方法见3.3章节。
构建场景库需选取对自动驾驶具有挑战性且在现实中有一定概率出现的场景。
由于场景的统计学意义难以精确估算,往往很难有力说明场景库与实际路测里程的确切关系。
一些自动驾驶相关企业在构建虚拟场景库方面进行了探索,例如:Mcity 出了六步分析思路,主要是利用蒙特卡罗算法,减少日常驾驶中没有发生事故的数据,用发生了危险事故的数据进行取代,实现人类驾驶员与自动驾驶车之间数据高频率交互;中国汽车技术研究中心将仿真场景划分为自然驾驶场景、危险工况场景、法律规范场景、参数重组场景四类,包括不同自然条件(天气、光线等),不同道路类型(路面状态、车道线类型等),不同交通参与者(车辆、行人位置速度等),不同环境类型(高速、小区、商场、乡村等)在内的多类型虚拟仿真测试用例。
目前,场景选取与场景库构建还处于不断探索的过程,可从以下方面持续开展研究:1)制定完善自动驾驶测试相关标准,指导测试工作与场景库构建;2)对典型复杂交通场景进行采集入库,例如主要城市、高速公路的拥堵与事故高发交叉口、路段,真实存在的复杂场景对自动驾驶测试有重要意义;3)对真实复杂静态场景进行要素分析,泛化生成多类别的静态测试场景;4)对真实复杂动态场景进行要素与行为分析,在交通宏观参数,驾驶员决策,车辆行为等多层面上进行泛化,生成多类别的动态测试场景;5)完善虚拟测试场景的标注方法、重要度评价理论,从而实现更好的场景库组织架构,以及针对 种测试需求的场景集快速生成。
5.2场景库标准场景测试用例主要通过虚拟仿真环境及工具链进行复现,因此建设虚拟场景数据库是连接场景数据与场景应用的关键桥梁。
场景测试用例需要标准以便实现仿真环境之间进行场景交换。
场景库的范围应当覆盖典型场景、边角场景、事故场景等多种类型。
5.2.1场景标准OpenSCENARIOOpenSCENARIO是一种开放文件格式,用于 述驾驶模拟应用程序中的动态内容。
OpenSCENARIO的主要用途是 述复杂、同步的交通参与者,涉及多个实体,如车辆、行人和其他交通参与者。
交通参与者的 述可能基于驾驶员的行为(例如执行车道更改)或轨迹(例如从记录的驾驶机动动作中获得)。
其他内容,如自我车辆的 述、司机外观、行人、交通和环境状况,也包括在标准中。
图5-1驾驶模拟场景(1)动机OpenSCENARIO项目于2014年底启动。
最初的想法已于2006年与OpenDRIVE®计划进行了讨论,并在斯图加特汽车仿真中心和VIRESSimulationstechnologieGmbH之间的项目会议上重新启用。
事实上,今天,驾驶模拟环境的静态内容可以在不依赖特定工具的标准格式中述:图5-2静态内容标准格式OpenDRIVE和OpenCRG在OpenSCENARIO计划中,重点将放在驾驶模拟应用的动态内容上:图5-3OpenSCENARIO众所周知,以通用数据格式 述动态内容并不能保证在各种模拟工具链中均得到相同结果。
但是,与此同时,拥有通用数据格式是促进不同用户和/或平台之间的场景交换的必要先决条件。
(2)路线图OpenSCENARIO®路线图的确切时间表仍有待确定,到2017年底,应 供以下项目:规格1)格式规范文档2)架构文件3)风格指南文件工具4)开源验证工具内容5)普通车辆数据库6)收集ADAS示例场景7)不同国家情景的变化支持8)有项目数据的网站9)票务系统随着2015年10月15日的第一次项目会议,OpenSCENARIO将进入其路线图的三个阶段中的第二个阶段。
在确定需求的初步阶段之后,此阶段将用于编写OpenSCENARIO文件格式的实际规范,同时考虑到在初步阶段已确定的所有潜在用户的要求。
进一步发展ASAMOpenSCENARIO的路线图。
案研讨会ASAMOpenSCENARIO(2019年1月17日至18日)的参与者决定同时启动一个转移项目和一个概念开发项目。
这样可以更快地进入市场。
转移项目的目标是使当前版本的OpenSCENARIO适应ASAM要求。
概念开发项目旨在讨论、评估和指定ASAMOpenSCENARIO主要扩展的概念。
如有需要,从原始项目生成的其他概念开发项目应能够同时运行。
概念开发项目的结果应纳入标准的进一步发展。
图5-4转移项目和概念开发项目并行开发(3)核心团队OpenSCENARIO核心团队已于2016年3月20日正式宣布,并开始扩展。
其成员将审核并正式发布OpenSCENARIO标准。
截至2017年3月5日的核心团队如下图所示。
按公司字母顺序列出清单。
每个公司最多还有两名代表。
图5-5OpenSCENARIO核心团队5.2.2场景库举例(一)中国汽车技术研究中心有限公司数据资源中心案例库根据智车科技报道,中国汽车技术研究中心有限公司数据资源中心将仿真场景划分为自然驾驶仿真场景、危险工况仿真场景、标准法规仿真场景、参数重组仿真场景四类。
(1)自然驾驶仿真场景——充分测试场景自然驾驶仿真场景来源于采集的驾驶场景数据库以及企业的道路测试场景。
自然驾驶仿真场景能够很好地体现测试的随机性、复杂性及典型性区域特点。
据报道目前数据中心已采集32万公里的自然驾驶场景数据,经过成熟的场景划分方法生成了上千种典型测试用例。
图5-6自然驾驶仿真场景(2)危险工况仿真场景——必要测试场景危险工况仿真场景主要涵盖恶劣天气环境、复杂道路交通以及典型交通事故三大类仿真场景。
从大量自然驾驶场景数据库中,通过对场景进行参数化统计分析, 炼出不同影响因素下的危险工况测试用例,其中包括天气光线、地理地形、交通拥堵、路面结构、特殊障碍物等因素引起的易发性危险场景案例。
图5-7危险工况仿真场景(3)标准法规仿真场景——基础测试场景标准法规测试场景是自动驾驶功能在研发和认证阶段需要满足的基本场景,数据中心已基于ISO、NHTSA、ENCAP、CNCAP等多项标准、评价规程构建了20余种标准仿真测试场景,支持AEB、ACC、LKA、APA等多种自动驾驶功能的仿真验证,同时贯通了标准场景的自动化测试流程。
图5-8标准法规测试场景(4)参数重组仿真场景——补充测试场景参数重组仿真场景旨在将已有仿真场景进行参数化设置并完成仿真场景的随机生成或自动重组,进而补充大量未知工况的测试场景,有效覆盖自动驾驶功能测试盲区。
图5-9参数重组仿真场景(二)百度Apollo案例库百度Apollo仿真场景分为Worldsim和Logsim。
Worldsim是由人为预设的障碍物行为和交通灯状态构成的场景,可以简单高效的测试自动驾驶车辆,但缺乏真实交通环境中复杂的情况;Logsim是由路测数据 取的场景, 供复杂多变的障碍物行为和交通状况,使场景充满不确定性。
图5-10百度Apollo仿真场景目前 供约200个场景,包括:基于不同的路型,包括十字路口、调头、直行、三叉路口、弯道。
基于不同的障碍物类型,包括行人、机动车、非机动车及其他。
基于不同的道路规划,包括直行、调头、变道、左转、右转、并道。
基于不同的红绿灯信号,包括红灯、黄灯、绿灯。
图5-11百度Apollo仿真场景库管理界面图5-12百度Apollo案例库场景(三)51VR51Sim-One案例库51VR仿真平台案例库支持来自真实采集的危险工况和人工编辑的标准案例。
目前 供的场景包括:基于不同的路型,包括直道、十字路口、弯道、调头、环岛、人行横道等。
基于不同的障碍物类型,包括行人、机动车、非机动车,静态物体等。
基于不同的道路规划,包括直行、突然插入,变道、转弯、并道,超车,靠边停车等。
基于不同的红绿灯信号,限速牌,停车牌等其中标准案例库率先支持《智能网联汽车自动驾驶功能测试规程(试行)》。
图5-1351Sim-One案例库之标准案例库51VR的案例编辑器:图5-1451Sim-One案例库之案例编辑器51VR的真实采集的场景和仿真:图5-1551Sim-One真实采集场景还原应用51VR同时支持动态智能体交通流场景案例,支持多种地图,车辆类型,车辆密度,司机开车风格配置,进行连续交通流场景仿真。
图5-1651Sim-One交通流配置图5-1751Sim-One交通流仿真案例场景。