【CN209678394U】激光雷达及扫地机器人【专利】
- 格式:pdf
- 大小:500.93 KB
- 文档页数:8
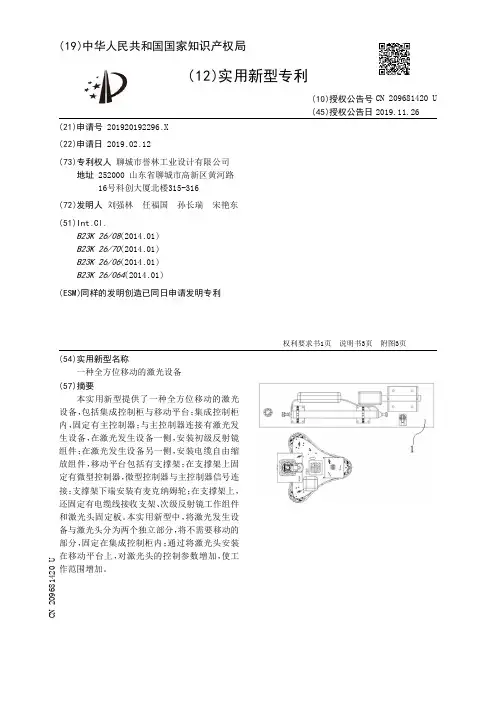
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920192296.X(22)申请日 2019.02.12(73)专利权人 聊城市誉林工业设计有限公司地址 252000 山东省聊城市高新区黄河路16号科创大厦北楼315-316(72)发明人 刘强林 任福国 孙长瑞 宋艳东 (51)Int.Cl.B23K 26/08(2014.01)B23K 26/70(2014.01)B23K 26/06(2014.01)B23K 26/064(2014.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种全方位移动的激光设备(57)摘要本实用新型提供了一种全方位移动的激光设备,包括集成控制柜与移动平台;集成控制柜内,固定有主控制器;与主控制器连接有激光发生设备,在激光发生设备一侧,安装初级反射镜组件;在激光发生设备另一侧,安装电缆自由缩放组件,移动平台包括有支撑架;在支撑架上固定有微型控制器,微型控制器与主控制器信号连接;支撑架下端安装有麦克纳姆轮;在支撑架上,还固定有电缆线接收支架、次级反射镜工作组件和激光头固定板。
本实用新型中,将激光发生设备与激光头分为两个独立部分,将不需要移动的部分,固定在集成控制柜内;通过将激光头安装在移动平台上,对激光头的控制参数增加,使工作范围增加。
权利要求书1页 说明书3页 附图3页CN 209681420 U 2019.11.26C N 209681420U权 利 要 求 书1/1页CN 209681420 U1.一种全方位移动的激光设备,其特征在于,包括集成控制柜与移动平台;所述的集成控制柜内,固定有主控制器;与主控制器连接有激光发生设备,在激光发生设备的一侧,安装有初级反射镜组件,所述的初级反射镜组件包括有初级反射镜与第一电机;初级反射镜安装在第一电机上,第一电机信号连接在主控制器上;在激光发生设备的另一侧,安装有电缆自由缩放组件,所述的电缆自由缩放组件包括有伸缩杆和电缆缠绕机,所述的电缆缠绕机内的电机,信号连接主控制器;所述的移动平台包括有支撑架;在支撑架上固定有微型控制器,微型控制器与主控制器信号连接;所述的支撑架下端安装有麦克纳姆轮,麦克纳姆轮上分别连接有电机,电机分别信号连接微型控制器;在支撑架上,还固定有电缆线接收支架、次级反射镜工作组件和激光头固定板;在激光头固定板上,固定有激光头;在激光头固定板的上端连接次级反射镜工作组件;所述的激光头次级反射镜工作组件包括有旋转组件与上下运动组件;所述的旋转组件包括有第二电机,第二电机输出端连接有主动轮,与主动轮啮合有从动轮;从动轮上固定有连接板,连接板上固定有微型滚珠丝杠,第三电机与微型滚珠丝杠连接,在微型滚珠丝杠上连接有升降架,升降架上固定次级反射镜组件。
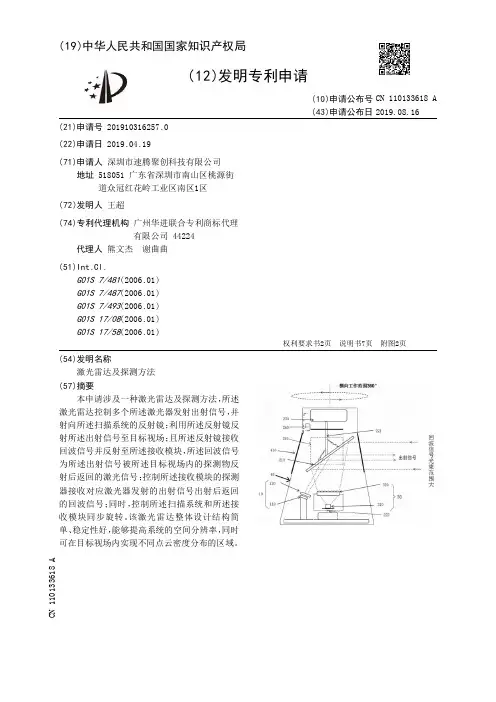
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910316257.0(22)申请日 2019.04.19(71)申请人 深圳市速腾聚创科技有限公司地址 518051 广东省深圳市南山区桃源街道众冠红花岭工业区南区1区(72)发明人 王超 (74)专利代理机构 广州华进联合专利商标代理有限公司 44224代理人 熊文杰 谢曲曲(51)Int.Cl.G01S 7/481(2006.01)G01S 7/487(2006.01)G01S 7/493(2006.01)G01S 17/08(2006.01)G01S 17/58(2006.01)(54)发明名称激光雷达及探测方法(57)摘要本申请涉及一种激光雷达及探测方法,所述激光雷达控制多个所述激光器发射出射信号,并射向所述扫描系统的反射镜;利用所述反射镜反射所述出射信号至目标视场;且所述反射镜接收回波信号并反射至所述接收模块,所述回波信号为所述出射信号被所述目标视场内的探测物反射后返回的激光信号;控制所述接收模块的探测器接收对应激光器发射的出射信号出射后返回的回波信号;同时,控制所述扫描系统和所述接收模块同步旋转。
该激光雷达整体设计结构简单、稳定性好,能够提高系统的空间分辨率,同时可在目标视场内实现不同点云密度分布的区域。
权利要求书2页 说明书7页 附图2页CN 110133618 A 2019.08.16C N 110133618A权 利 要 求 书1/2页CN 110133618 A1.一种激光雷达,其特征在于,包括:发射模块、接收模块和扫描系统,所述发射模块,包括多个激光器,用于发射出射信号;所述扫描系统,包括绕第一旋转轴旋转的反射镜,所述反射镜与所述第一旋转轴连接且倾斜设置,用于反射所述出射信号至目标视场,同时还用于接收回波信号并反射至所述接收模块,所述回波信号为所述出射信号被所述目标视场内的探测物反射后返回的激光信号;所述接收模块,包括多个探测器,每个所述探测器接收对应的所述激光器发射的所述出射信号出射后返回的所述回波信号;其中,所述接收模块和所述扫描系统同步转动。
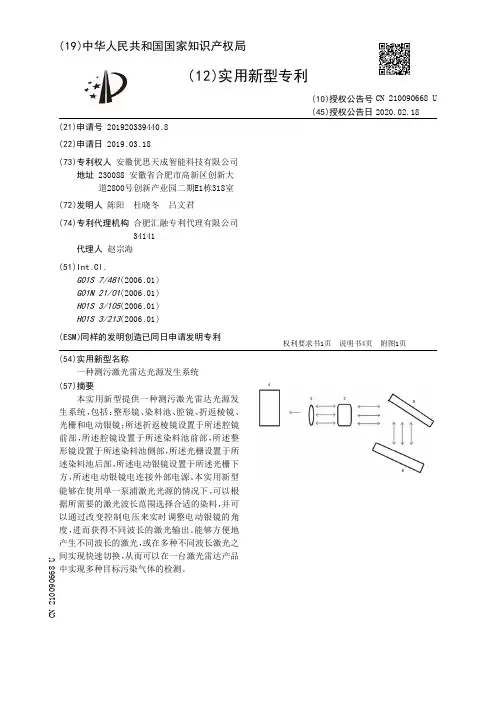
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920339440.8(22)申请日 2019.03.18(73)专利权人 安徽优思天成智能科技有限公司地址 230088 安徽省合肥市高新区创新大道2800号创新产业园二期E1栋318室(72)发明人 陈阳 杜晓冬 吕文君 (74)专利代理机构 合肥汇融专利代理有限公司34141代理人 赵宗海(51)Int.Cl.G01S 7/481(2006.01)G01N 21/01(2006.01)H01S 3/105(2006.01)H01S 3/213(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种测污激光雷达光源发生系统(57)摘要本实用新型提供一种测污激光雷达光源发生系统,包括:整形镜、染料池、腔镜、折返棱镜、光栅和电动银镜;所述折返棱镜设置于所述腔镜前部,所述腔镜设置于所述染料池前部,所述整形镜设置于所述染料池侧部,所述光栅设置于所述染料池后部,所述电动银镜设置于所述光栅下方,所述电动银镜电连接外部电源。
本实用新型能够在使用单一泵浦激光光源的情况下,可以根据所需要的激光波长范围选择合适的染料,并可以通过改变控制电压来实时调整电动银镜的角度,进而获得不同波长的激光输出。
能够方便地产生不同波长的激光,或在多种不同波长激光之间实现快速切换,从而可以在一台激光雷达产品中实现多种目标污染气体的检测。
权利要求书1页 说明书4页 附图1页CN 210090668 U 2020.02.18C N 210090668U权 利 要 求 书1/1页CN 210090668 U1.一种测污激光雷达光源发生系统,其特征在于,所述系统包括:整形镜(1)、染料池(2)、腔镜(3)、折返棱镜(4)、光栅(5)和电动银镜(6);所述折返棱镜(4)设置于所述腔镜(3)前部,所述腔镜(3)设置于所述染料池(2)前部,所述整形镜(1)设置于所述染料池(2)侧部,所述光栅(5)设置于所述染料池(2)后部,所述电动银镜(6)设置于所述光栅(5)下方,所述电动银镜(6)电连接外部电源。
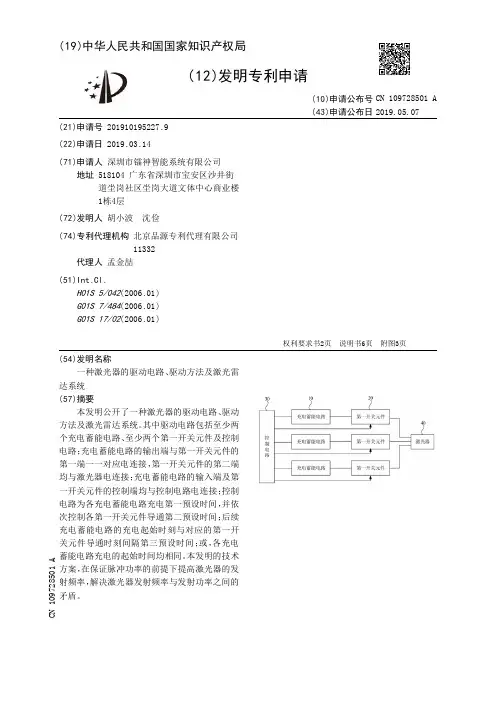
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910195227.9(22)申请日 2019.03.14(71)申请人 深圳市镭神智能系统有限公司地址 518104 广东省深圳市宝安区沙井街道坣岗社区坣岗大道文体中心商业楼1栋4层(72)发明人 胡小波 沈俭 (74)专利代理机构 北京品源专利代理有限公司11332代理人 孟金喆(51)Int.Cl.H01S 5/042(2006.01)G01S 7/484(2006.01)G01S 17/02(2006.01)(54)发明名称一种激光器的驱动电路、驱动方法及激光雷达系统(57)摘要本发明公开了一种激光器的驱动电路、驱动方法及激光雷达系统。
其中驱动电路包括至少两个充电蓄能电路、至少两个第一开关元件及控制电路;充电蓄能电路的输出端与第一开关元件的第一端一一对应电连接,第一开关元件的第二端均与激光器电连接;充电蓄能电路的输入端及第一开关元件的控制端均与控制电路电连接;控制电路为各充电蓄能电路充电第一预设时间,并依次控制各第一开关元件导通第二预设时间;后续充电蓄能电路的充电起始时刻与对应的第一开关元件导通时刻间隔第三预设时间;或,各充电蓄能电路充电的起始时间均相同。
本发明的技术方案,在保证脉冲功率的前提下提高激光器的发射频率,解决激光器发射频率与发射功率之间的矛盾。
权利要求书2页 说明书6页 附图3页CN 109728501 A 2019.05.07C N 109728501A1.一种激光器的驱动电路,其特征在于,包括:至少两个充电蓄能电路、至少两个第一开关元件以及控制电路;其中,所述至少两个充电蓄能电路的输出端与所述至少两个第一开关元件的第一端一一对应电连接,每个第一开关元件的第二端均与激光器电连接;所有充电蓄能电路的输入端以及所有第一开关元件的控制端均与所述控制电路电连接;所述控制电路用于为各个充电蓄能电路充电第一预设时间,并依次控制各个所述第一开关元件导通第二预设时间;其中,后续充电蓄能电路充电的充电起始时刻与对应的第一开关元件导通时刻间隔第三预设时间;或者,各个充电蓄能电路充电的起始时间均相同。
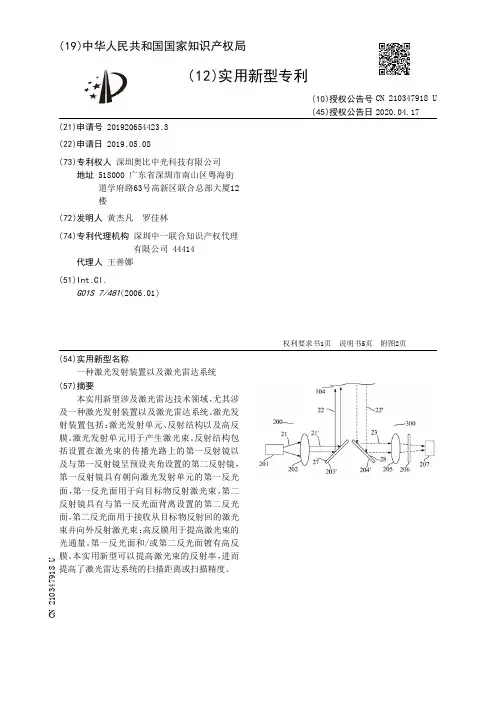
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920654423.3(22)申请日 2019.05.08(73)专利权人 深圳奥比中光科技有限公司地址 518000 广东省深圳市南山区粤海街道学府路63号高新区联合总部大厦12楼(72)发明人 黄杰凡 罗佳林 (74)专利代理机构 深圳中一联合知识产权代理有限公司 44414代理人 王善娜(51)Int.Cl.G01S 7/481(2006.01)(54)实用新型名称一种激光发射装置以及激光雷达系统(57)摘要本实用新型涉及激光雷达技术领域,尤其涉及一种激光发射装置以及激光雷达系统。
激光发射装置包括:激光发射单元、反射结构以及高反膜。
激光发射单元用于产生激光束。
反射结构包括设置在激光束的传播光路上的第一反射镜以及与第一反射镜呈预设夹角设置的第二反射镜,第一反射镜具有朝向激光发射单元的第一反光面,第一反光面用于向目标物反射激光束,第二反射镜具有与第一反光面背离设置的第二反光面,第二反光面用于接收从目标物反射回的激光束并向外反射激光束;高反膜用于提高激光束的光通量。
第一反光面和/或第二反光面镀有高反膜。
本实用新型可以提高激光束的反射率,进而提高了激光雷达系统的扫描距离或扫描精度。
权利要求书1页 说明书5页 附图2页CN 210347918 U 2020.04.17C N 210347918U权 利 要 求 书1/1页CN 210347918 U1.一种激光发射装置,用于向目标物发射激光束,其特征在于,所述激光发射装置包括:激光发射单元,用于产生所述激光束;反射结构,包括设置在所述激光束的传播光路上的第一反射镜以及与所述第一反射镜呈预设夹角设置的第二反射镜,所述第一反射镜具有朝向所述激光发射单元的第一反光面,所述第一反光面用于向所述目标物反射所述激光束,所述第二反射镜具有与所述第一反光面背离设置的第二反光面,所述第二反光面用于接收从所述目标物反射回的所述激光束并向外反射所述激光束;以及高反膜,用于提高所述激光束的光通量;其中,所述第一反光面和/或所述第二反光面镀有所述高反膜。
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910335587.4(22)申请日 2019.04.24(71)申请人 禾多科技(北京)有限公司地址 100089 北京市海淀区阜外亮甲店1号恩济西园产业园21号楼一层21-14(72)发明人 赵家兴 倪凯 骆沛 杜艳维 (74)专利代理机构 北京远大卓悦知识产权代理事务所(普通合伙) 11369代理人 汤小东(51)Int.Cl.G01S 7/497(2006.01)(54)发明名称场端多线束激光雷达的离线标定方法(57)摘要本发明公开了一种场端多线束激光雷达的离线标定方法,包括:S1、点云获取:由布设在场端的各个激光雷达分别获取点云,用三维激光扫描仪扫描得到场端的场景地图点云;S2、粗标定:由所述点云中随机选取共面4点作为目标点,利用4PCS算法在所述场景地图点云中找到与选取的点云对应的所有对应点,通过不断迭代优化目标函数得到初级标定外参;S3、细标定:将所述初级标定外参作为初始值,利用GICP算法再次循环迭代优化目标函数,最终得到终极标定结果。
其通过对激光雷达的粗标定后再进行细标定,使得各个激光雷达的标定精度高,保证了自动泊车的顺利进行。
权利要求书1页 说明书4页CN 110109086 A 2019.08.09C N 110109086A1.一种场端多线束激光雷达的离线标定方法,其中,包括:S1、点云获取:由布设在场端的各个激光雷达分别获取点云,用三维激光扫描仪扫描得到场端的场景地图点云;S2、粗标定:由所述点云中随机选取共面4点作为目标点,利用4PCS算法在所述场景地图点云中找到与选取的点云对应的所有对应点,通过不断迭代优化目标函数得到初级标定外参;S3、细标定:将所述初级标定外参作为初始值,利用GICP算法再次循环迭代优化目标函数,最终得到终极标定结果。
2.如权利要求1所述的场端多线束激光雷达的离线标定方法,其中,所述目标函数通过最小二乘法不断迭代优化,具体公式为:其中,R为三维旋转矩阵;T为平移向量;P t i 为目标点对,为对应点对;N p 为对应点总数。
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号
(45)授权公告日
(21)申请号 201920272485.8
(22)申请日 2019.03.04
(73)专利权人 深圳市杉川机器人有限公司
地址 518000 广东省深圳市南山区高新技
术园北区北环大道9018号大族创新大
厦A区5层501室
(72)发明人 杨勇 宫海涛 姜祥 贺华元
(74)专利代理机构 北京超凡宏宇专利代理事务
所(特殊普通合伙) 11463
代理人 曹桓
(51)Int.Cl.
A47L 11/24
(2006.01)
A47L 11/40
(2006.01)
G01S 17/93
(2006.01)
(54)实用新型名称
激光雷达及扫地机器人
(57)摘要
本实用新型公开了激光雷达,其包括盖体及
转动装置,所述转动装置包括固定座及盖合于所
述固定座的上表面且可相对于所述固定座自转
的转动台,所述盖体固定安装于所述转动台的上
表面,所述盖体与所述转动台围成用于安装激光
模块的模块容置腔;所述激光雷达还包括连接所
述转动装置及所述激光模块的PCB板,所述PCB板
安装于所述转动台及所述盖体之间,所述PCB板
包括穿过所述转动台用于检测所述转动台转动
角度的光电传感器;所述光电传感器安装于所述
PCB板的外缘内。因此,本实用新型的激光雷达可
以进一步降低高度及宽度,从而减小整体体积,
安装了该激光雷达的扫地机器人也降低了整体
高度及减小了体积。
权利要求书1页 说明书5页 附图1页
CN 209678394 U
2019.11.26
C
N
2
0
9
6
7
8
3
9
4
U
1.激光雷达,其特征在于,包括盖体及转动装置,所述转动装置包括固定座及盖合于所
述固定座的上表面且可相对于所述固定座自转的转动台,所述盖体固定安装于所述转动台
的上表面,所述盖体与所述转动台围成用于安装激光模块的模块容置腔;
所述激光雷达还包括连接所述转动装置及所述激光模块的PCB板,所述PCB板安装于所
述转动台及所述盖体之间,所述PCB板包括穿过所述转动台用于检测所述转动台转动角度
的光电传感器;所述光电传感器安装于所述PCB板的外缘内。
2.根据权利要求1所述的激光雷达,其特征在于,所述转动台的上表面设有用于安装所
述PCB板的安装槽;所述PCB板上设有用于安装所述激光模块的安装孔。
3.根据权利要求1所述的激光雷达,其特征在于,所述转动台的上表面通过立柱连接所
述盖体,所述盖体的内腔设有与所述立柱对应的立柱孔。
4.根据权利要求1所述的激光雷达,其特征在于,所述转动台及所述固定座之间设有转
动轴承;所述转动台的下表面设有与所述转动轴承的外环固定连接的第一凸环;所述固定
座设有与所述转动轴承的内环固定连接的第二凸环。
5.根据权利要求1所述的激光雷达,其特征在于,所述PCB板为圆形,所述光电传感器在
所述PCB板的安装位置与所述PCB板的外缘持平。
6.根据权利要求1所述的激光雷达,其特征在于,所述固定座的侧面设有凸耳,所述凸
耳设有用于连接外接装置的连接孔。
7.根据权利要求4所述的激光雷达,其特征在于,所述固定座的上表面设有一个第一凸
起及多个第二凸起,所述第一凸起及所述第二凸起共同围成用于供所述光电传感器检测所
述转动台的转动角度的刻度环,所述第一凸起的宽度小于第二凸起的宽度。
8.根据权利要求7所述的激光雷达,其特征在于,所述光电传感器穿过所述转动台后设
于所述固定座的侧壁与所述刻度环之间。
9.根据权利要求7所述的激光雷达,其特征在于,所述刻度环设于所述第二凸环的上
方。
10.扫地机器人,其特征在于,包括权利要求1-9中的任一项激光雷达。
权 利 要 求 书
1/1页
2
CN 209678394 U