线性系统的校正方法自动控制原理
- 格式:pptx
- 大小:810.47 KB
- 文档页数:33
自动控制原理校正课程设计-- 线性控制系统校正与分析课程设计报告书题目线性控制系统校正与分析院部名称机电工程学院专业10电气工程及其自动(单)班级组长姓名学号设计地点工科楼C 214设计学时1周指导教师金陵科技学院教务处制目录目录 (3)第一章课程设计的目的及题目 (4)1.1课程设计的目的 (4)1.2课程设计的题目 (4)第二章课程设计的任务及要求 (6)2.1课程设计的任务 (6)2.2课程设计的要求 (6)第三章校正函数的设计 (7)3.1设计任务 (7)3.2设计部分 (7)第四章系统动态性能的分析 (10)4.1校正前系统的动态性能分析 (10)4.2校正后系统的动态性能分析 (13)第五章系统的根轨迹分析及幅相特性 (16)5.1校正前系统的根轨迹分析 (16)5.2校正后系统的根轨迹分析 (18)第七章传递函数特征根及bode图 (20)7.1校正前系统的幅相特性和bode图 (20)7.2校正后系统的传递函数的特征根和bode图 (21)第七章总结 (23)参考文献 (24)第一章 课程设计的目的及题目1.1课程设计的目的⑴掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
⑵学会使用MATLAB 语言及Simulink 动态仿真工具进行系统仿真与调试。
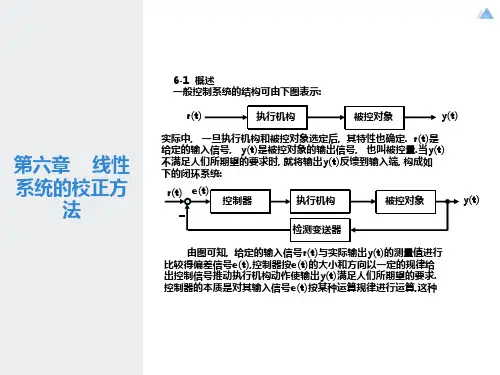
1.2课程设计的题目 已知单位负反馈系统的开环传递函数)125.0)(1()(0++=s s s K s G ,试用频率法设计串联滞后校正装置,使系统的相角裕量 30>γ,静态速度误差系数110-=s K v 。
\第二章课程设计的任务及要求2.1课程设计的任务设计报告中,根据给定的性能指标选择合适的校正方式对原系统进行校正(须写清楚校正过程),使其满足工作要求。
然后利用MATLAB对未校正系统和校正后系统的性能进行比较分析,针对每一问题分析时应写出程序,输出结果图和结论。


武汉工程大学实验报告专业 电气自动化 班号 指导教师 姓名 同组者 无实验名称 线性系统串联校正实验日期 第 五 次实验 一、 实验目的1.熟练掌握用MATLAB 语句绘制频域曲线。
2.掌握控制系统频域范围内的分析校正方法。
3.掌握用频率特性法进行串联校正设计的思路和步骤。
二、 实验内容1.某单位负反馈控制系统的开环传递函数为)1()(+=s s Ks G ,试设计一超前校正装置,使校正后系统的静态速度误差系数120-=s K v ,相位裕量050=γ,增益裕量dB K g 10lg 20=。
解:取20=K ,求原系统的相角裕度。
num0=20; den0=[1,1,0]; w=0.1:1000;[gm1,pm1,wcg1,wcp1]=margin(num0,den0); [mag1,phase1]=bode(num0,den0,w);[gm1,pm1,wcg1,wcp1] margin(num0,den0) grid; ans =Inf 12.7580 Inf 4.4165 由结果可知,原系统相角裕度7580.12=r ,srad c /4165.4=ω,不满足指标要求,系统的Bode 图如图5-1所示。
考虑采用串联超前校正装置,以增加系统的相角裕度。
1010101010幅值(d b )--Go,-Gc,GoGcM a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 12.8 deg (at 4.42 rad/sec)Frequency (rad/sec)图5-1 原系统的Bode 图由),3,8.12,50(00000c m c Φ=Φ=+-=Φ令取为原系统的相角裕度εγγεγγ,mm ϕϕαsin 1sin 1-+=可知:e=3; r=50; r0=pm1;phic=(r-r0+e)*pi/180;alpha=(1+sin(phic))/(1-sin(phic)) 得:alpha = 4.6500[il,ii]=min(abs(mag1-1/sqrt(alpha)));wc=w( ii); T=1/(wc*sqrt(alpha)); num0=20; den0=[1,1,0]; numc=[alpha*T,1]; denc=[T,1];[num,den]=series(num0,den0,numc,denc); [gm,pm,wcg,wcp]=margin(num,den); printsys(numc,denc) disp('校正之后的系统开环传递函数为:');printsys(num,den) [mag2,phase2]=bode(numc,denc,w); [mag,phase]=bode(num,den,w); subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),'-.'); grid; ylabel('幅值(db)'); title('--Go,-Gc,GoGc'); subplot(2,1,2); semilogx(w,phase,w,phase1,'--',w,phase2,'-',w,(w-180-w),':'); grid; ylabel('相位(0)'); xlabel('频率(rad/sec)');title(['校正前:幅值裕量=',num2str(20*log10(gm1)),'db','相位裕量=',num2str(pm1),'0';'校正后:幅值裕量=',num2str(20*log10(gm)),'db','相位裕量=',num2str(pm),'0'])1010101010-100-5050幅值(d b )--Go,-Gc,GoGc1010101010-200-150-100-50050相位(0)频率(rad/sec)图5-2 系统校正前后的传递函数及Bode 图 num/den = 0.35351 s + 1-------------- 0.076023 s + 1校正之后的系统开环传递函数为:num/den = 7.0701 s + 20 -----------------------------0.076023 s^3 + 1.076 s^2 + s 系统的SIMULINK 仿真:校正前SIMULINK 仿真模型:单位阶跃响应波形:校正后SIMULINK仿真模型:单位阶跃响应波形:分析:由以上阶跃响应波形可知,校正后,系统的超调量减小,调节时间变短,稳定性增强。